
Abstract
Visual methods based on remotely operated vehicles (ROVs) and autonomous underwater vehicles (AUVs) are increasingly used to study and monitor mesophotic-to-deep benthic marine ecosystems. To date, these techniques are frequently used to meet the requirements for benthic habitat mapping of most national and international directives and marine ecosystem management programs (e.g., Marine Strategy Framework Directive (MSFD) and OSPAR Convention), by supporting the exploration of taxonomical composition of biological communities, the identification of ecologically relevant habitat, and the identification of areas of priority for conservation. However, the processing of visual data is challenging in terms of analytical time, with automatic and semi-automatic methods that require ad hoc sampling strategies and/or instrumentation. Therefore, video survey analysis of benthic marine habitat is largely restricted to a limited subset of photograms, often extracted manually. By comparing video frame extractions performed at regular time and distance intervals, this chapter explores how ROV video subset methods may affect the estimation of the substrate cover extent and the taxonomical composition of the biological communities, with the aim to identify an efficient compromise between analytical effort and quality of results.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Deep-sea habitats
- Mapping methodology
- Method accuracy
- Video-survey
- Community composition
- Mediterranean Sea
1 Introduction
As the human footprint extends deeper into our oceans, information on the seafloor and associated biological communities is required for devising appropriate conservation actions to achieve national and international sustainability goals (e.g., Lundquist and Granek 2005; Davies et al. 2007; Micheli et al. 2013; Zampoukas et al. 2014; Henry and Roberts 2017; Danovaro et al. 2020; Manea et al. 2020). There is growing awareness that the mitigation of anthropic pressure on marine ecosystems (e.g., biodiversity loss, transformed food webs, and marine pollution) relies on a more efficient transfer of scientific knowledge to decision-makers (Cvitanovic et al. 2015).
The rapid development of underwater technologies and the concurrent acceleration in computing permit the gathering and handling of a huge quantity of data. For instance, remotely operated vehicles (ROVs) and autonomous underwater vehicles (AUVs) played a pivotal role for discovery, mapping, and detailed examination of ecosystems at depths that were unimaginable just decades ago (e.g., Cordes et al. 2007; Freiwald et al. 2009; Lundsten et al. 2010; Huvenne et al. 2011; Angeletti et al. 2014; Wynn et al. 2014; Correa et al. 2016; Vanreusel et al. 2016; Danovaro et al. 2017). Habitat mapping techniques are a powerful tool to collect raw information on marine benthic environments that is convertible to quantitative data and to date play a primary role in fulfilling the requirements of national and international directives and marine ecosystem management programs (e.g., Marine Strategy Framework Directive (MSFD) and OSPAR Convention). Typical applications include identifying habitats for priority of conservation (e.g., Fosså et al. 2002; Grasmueck et al. 2006; Bongaerts et al. 2010; Howell et al. 2010; Fabri et al. 2014; Rengstorf et al. 2014; Taviani et al. 2017, 2019; IUCN 2019; Angeletti et al. 2020a; Chaniotis et al. 2020; Prampolini et al. 2020), tracking biological community status providing species abundances and biodiversity indices (e.g., Norcross and Mueter 1999; Buhl-Mortensen et al. 2012; Ayma et al. 2016; Consoli et al. 2016; Trotter et al. 2019; Beccari et al. 2020), monitoring the efficacy of management interventions (fishery restricted areas (FRAs), marine protected areas (MPAs): Huvenne et al. 2016; Rowden et al. 2017; Innangi et al. 2019; Angeletti et al. 2020b among others), and reporting the overall environmental status of benthic ecosystems (e.g., Cánovas-Molina et al. 2016; Enrichetti et al. 2019; Fabri et al. 2019). Visual methods for monitoring benthic marine ecosystems based on ROV (or AUV) video surveys provide a relatively high precision in estimating biodiversity and habitat percentage cover (Savini et al. 2014, 2017; Grinyó et al. 2016; Conti et al. 2019) and represent permanent records allowing the comparison of surveys through time and from different areas (e.g., Lundsten et al. 2010; Langenkämper et al. 2019).
2 Processing Techniques of Benthic Visual Surveys
Most common methods for quantitative benthic cover estimation involve manual point-based approaches (Foster et al. 1991; Meese and Tomich 1992; Leonard and Clark 1993; Carleton and Done 1995) and region-based percentage estimations (Meese and Tomich 1992; Garrabou et al. 2002; Teixidó et al. 2011; Pech et al. 2004; Guinda et al. 2014). Automatic and semi-automatic methods have been tested for faster the analysis of benthic video recordings (Stokes and Deane 2009; Aguzzi et al. 2011), but their application is still labor-intensive or requires ad hoc instrumentation (Foglini et al. 2019; Robert et al. 2020). Some visual method applications need a certain degree of overlap among frames to ensure a complete seafloor representation (e.g., 3D reconstructions, Robert et al. 2020), while others avoid frame overlap to reduce analysis replications (Bo et al. 2014).
In the study of benthic habitats and biological communities, ROV video transects should be carried out along linear paths, navigating at constant speed and altitude from the seafloor (Huvenne et al. 2019). This is particularly important for monitoring purposes (e.g., MSFD program: Zampoukas et al. 2014), in order to guarantee a homogeneous representation of the investigated portion of the seafloor and allow the correct estimation of both habitat extents and community compositions (Eleftheriou and McIntyre 2005). However, ROV transect paths and navigation speeds may be altered by the need for higher detail, by the morphology of the investigated habitat, or by external factors (e.g., weather conditions, technical issues).
3 Frame-Based Video Subsamplings: A Methods Comparison
The plasticity of visual methods to study benthic habitats leaves the doors open to a great variety of analytical techniques. However, the analysis of visual data remains challenging in terms of analytical time, often forcing the analysis to only a limited subset of frames, extracted (often manually) at regular time intervals (e.g., Bo et al. 2014; Fabri et al. 2014; Cau et al. 2015 ).
Some major questions arise: does the video subsampling strategy influence the quality of results? What is an efficient compromise between analytical effort and results quality?
To explore the accuracy of frame-based methods, we compared the substrate cover estimates and the biological community taxonomical compositions obtained by the analyses of a subset of frames with those resulting from the analysis of the entire videos. We performed video subsamplings by extracting photograms at regular time (4, 10, and 30 s) or distance intervals (0.5, 1, and 3 m).
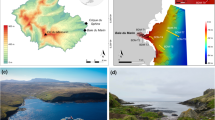
Three ROV dives were selected for this study from the MS16_II, MS17_II, and MS17_I oceanographic cruises carried out on R/V Minerva Uno (Table 1), in the framework of the Italian MSFD monitoring program. The video surveys explored three gentle-slope habitats along the Italian margin (Fig. 1): a coralligenous formation between 65 and 80 m on the Amendolara Seamount in the Ionian Sea (Figs. 1a, b and 2A, B; Angeletti et al. 2017), a mesophotic oyster reef off Santa Maria di Leuca in the Ionian Sea between 95 and 115 m (Figs. 1a, c and 2C, D; Castellan et al. 2019; Angeletti and Taviani 2020), and cold-water coral (CWC) mounds in the Corsica Channel located in the Tyrrhenian Sea at 400–430 m depth (Figs. 1a, d and 2E, F; Angeletti et al. 2020c).

(a) Map illustrating the locations of the ROV surveys used in the study; CC Corsica Channel, AS Amendolara Seamount, SML Santa Maria di Leuca. (b, c, and d) Detailed maps showing the ROV tracks and the substrate mapped by analyzing the entire videos. Bold contour lines stand for 5 m depth intervals; thin lines refer to 2.5 m

Examples of the different habitats surveyed. (A–B) Coralligenous formation at the Amendolara Seamount showing intense faunal cover dominated by several sponges among which Hexadella detritifera (h) is easily recognizable and scleractinian corals such as Phyllangia americana (p) and Filograna-Salmacina complex (f) are also common findings; bar = 20 cm. Close-up (B) of coralligenous formation dominated by the bryozoans Smittina cervicornis (s) and Hornera frondiculata (h); bar = 5 cm. (C–D) Mesophotic reef dominated by Neopycnodonte cochlear at Monopoli. Note the tiny nudibranch Hypselodoris tricolor (c) grazing on Neopycnodonte shells; bar = 3 cm. The large undetermined orange sponge represents the mega-epifauna at this site; bar = 10 cm. (E–F) Cold-water coral mound at Corsica Channel site showing the colonial scleractinian Madrepora oculata (m) characterizing this site; bar = 20 cm. (F) The octocoral Swiftia pallida (s) co-occurs at this site, while the echinoid Echinus melo (e) is grazing on M. oculata framework; bar = 20 cm
ROV dives were conducted using a Pollux III (Global Electric Italiana) equipped with a low-resolution CCD video camera for navigation and a high-resolution (2304 × 1296 pixels) video camera. The ROV was equipped with an underwater acoustic tracking system that provided position and depth at 1 s intervals. The ROV velocity along the tracks was calculated as the ratio between the distance of the tracked positions and the relative time gap. Three parallel laser beams (with 20 cm separation) were mounted on the ROV providing a scale on the videos. Dives track-points were smoothed utilizing Adelie Video (© Ifremer) and ArcGIS (© ESRI) software. The Adelie Video tool “points to line” was used to produce a line-format track of ROV dives.
Video recordings were done maintaining ca. 2 m of altitude from the seafloor. In Station MS16_II_83, the mean survey speed was equal to 0.13 m/s, and in Station MS17_II_115, the average speed was 0.22 m/s, while in Station MS17_I_135, the ROV sailed at 0.21 m/s (Table 3).
The full-video analysis (hereafter “reference analysis”) was performed by extracting one frame every second. The substrate cover was obtained by recording the changes in dominant substrate type, i.e., when a component was >50% in the video frame (Fig. 1b–d). The seafloor was classified as “Hard” (geological or biological hard structures), “Mobile” (soft bottoms), or “NA” (bottom not visible). The substrate covering extension was calculated using ArcGIS software.
Macro- and mega-benthic organisms were identified to the lowest possible taxonomic rank, counted and georeferenced by using Adelie Video software. Taxonomic classification followed the World Register of Marine Species database (WoRMS Editorial Board 2020). Finally, taxa unidentifiable at species level were categorized only as morpho-species or morphological categories (e.g., Angeletti et al. 2019; Santín et al. 2019 with references therein).
To test the efficiency of time-based (TB) subsampling methods, a frame every 4, 10, and 30 s was extracted using Adelie Video software. Frames were analyzed for taxonomical composition and substrate type following the methodology described above.
The intervals used for video subsampling the videos with distance-based (DB) methods were selected to obtain a number of extracted frames similar to those based on time intervals, allowing the comparison among tested methods. A point every 0.5 m, 1 m, and 3 m was generated along the plan view of the ROV tracks using the “Generate points along line” tool in ArcGIS software. The generated points were paired with the ROV tracks by means of the “Spatial Join” tool (Match option: Intersect; Search Radius: 0.05 m) in order to obtain the UTM time for each generated point. Frames were then extracted from video recordings matching the UTM times and analyzed for taxonomical composition and substrate coverings following the methods described above.
For each ROV video, the substrate extents and the number of taxa obtained by each methodology were compared to those resulting from the reference analysis. The percentage errors were calculated. The Kruskal-Wallis test and the post hoc Dunn’s test were used to assess the differences in the percentage errors among the sampling intervals (4, 10, and 30 s and 0.5, 1, and 3 m) and subsampling methods (TB and DB). Statistical analyses were performed by using R software (R core team 2013).
With the aim of quantifying the number of overlapped frames, a unique serial ID number was assigned to frames extracted with the same technique showing a new section of seafloor. When adjacent frames duplicated portions of the seafloor (>70% of the frame), the same ID was allotted to those photograms. The ratio between the total number of frames and those presenting a unique ID allowed us to estimate the percentage of overlapping images.
3.1 Method Accuracy
3.1.1 Substrate Cover Extent
The reference analysis performed in Station MS16_II_83 revealed that “Hard” and “Mobile” substrate types almost equally composed the 647.7 m of explored seafloor, covering 44.9% (corresponding to 291.1 m) and 41.4% (286.3 m), respectively. The remaining 13.6% (88.3 m) of the transect was classified as “NA” (Fig. 3a; Table 2).

(a–c) Bar plot showing the spatial cover extent of different substrate types calculated with the tested techniques. Dashed lines refer to extents calculated by analyzing the entire video footages and used as reference values. (d) Average percentage error in the estimation of substrate covering for each method. Error bars represent standard errors
In Station MS17_II_115, the reference analysis detected “Hard” substrate for 53.7% (481.5 m) and “Mobile” for 30.9% (276.7 m), while 15.4% (138.4 m) was assigned to “NA” (Fig. 3b and Table 2).
The longest ROV survey was Station MS17_I_135, with 1041.5 m of seafloor explored. The reference analysis classified 30% (312.6 m) of the transect as “Hard,” the 52.1% (542.2 m) as “Mobile,” and the 17.9% (186.7 m) as “NA” (Fig. 3c and Table 2).
The estimation of substrate cover performed by using TB methods reported strongly higher average percentage errors when compared to DB techniques. The “Hard” class reported percentage errors up to 1.82% ± 0.81 (SE), and the “Mobile” was incorrectly estimated with a maximum average error of 5.44% ± 3.03, while the “NA” was mainly underestimated with errors reaching 4.58% ± 2.24 with TB methods (Fig. 4d and Table 3).

(a) Bar plot reporting the percentage of taxa identified with the tested techniques in each video recording. (b) Average percentage error in detecting taxa composition of surveyed biological communities. Error bars represent standard errors
On the contrary, DB methods showed average errors always below the 0.15%. The Kruskal-Wallis test proved the observed differences between TB and DB method accuracy, reporting a p-value <0.01.
3.1.2 Taxonomic Composition
The reference analysis of Station, exploring the coralligenous community of the Amendolara Seamount, led to the identification of n = 50 taxa (Table 4). All TB methods efficiently detected the taxonomical composition at this site, showing a performance decrease with wider subsampling time intervals (Fig. 4a and Table 2). The 4 s interval method extracted 1712 frames for taxonomical analysis (Table 2), which resulted in the identification of 100% of taxa (n = 50), with respect to the reference analysis. The lower number of photograms extracted by using 10 s and 30 s intervals (684 and 228, respectively) slightly reduced the taxa detection accuracy, with 10 s method reporting 96% (n = 48) of total taxa and 86% (n = 43) identified by 30 s interval selection. Although the DB methods selected about the same number of frames (Table 2), the percentages of detected taxa were lower when compared to time interval methods: 92% (n = 46) were identified with 0.5 m intervals and 90% (n = 45) by using 1 m intervals, and 80% (n = 40) were detected with intervals of 3 m (Fig. 4a).
Station MS17_II_115 explored a mesophotic oyster reef habitat hosting highly diverse biological community where reference analysis identified n = 82 taxa. The 0.5 m method showed the highest accuracy, detecting n = 74 taxa (90%). The 10 s and 1 m methods reported similar results, identifying n = 65 (79%) and n = 64 taxa (78%), respectively, while the 3 m interval frame selections showed a higher accuracy (n = 55, 67%) when compared to those based on 30 s extractions (n = 49, 60%) (Fig. 4a).
Reference analysis of Station MS17_I_135 recorded n = 26 taxa surveying the CWC mounds. TB and DB methods showed similar performances (Fig. 4a and Table 2). The 0.5 m method recognized 88% (n = 23) of total taxa, while the 4 s method detected 96% (n = 25). The selection of frames every 1 m or 10 s gave similar results, reporting 22 (85%) and 21 (81%) taxa, and the efficiencies of 30 s and 3 m interval methods were equal (21 taxa each, 81%).
On average, the 4 s interval missed 7.29% ± 4.82 of total taxa, 15.97% ± 5.99 were not detected extracting frames at the 10 s interval, and the 30 s interval showed an error of 25.73% ± 7.98. DB methods reported lower accuracies: the 0.5 m method reported an error of 11.22% ± 1.98, while 17.14% ± 3.79 of total taxa were not identified using 1 m intervals, and the 3 m technique missed 25.31% ± 4.26 of the taxa (Fig. 4b).
Although no significant differences among sampling intervals and between TB and DB methods were detected by the Kruskal-Wallis test, the results showed that small extraction intervals and, thus, a larger amount of frames extracted were more efficient in the detection of taxa composition.
3.1.3 The Influence of Survey Velocity
Maintenance of a regular velocity during visual surveys is among the major factors to guarantee a homogenous recording of the seafloor (Huvenne et al. 2019) and ensure the detection and identification of features of interest by operators. The ROV navigation velocity, however, may largely vary along the tracks in relation to technical issues (i.e., navigation against current) and the need for higher-detailed recordings. When using video subsampling techniques based on time interval, the variation in ROV velocity may influence frames distribution along the transects, over-sampling in correspondence of ROV slowdown, and under-sampling when the vehicle velocity increases (Fig. 5). Frame density extracted with TB methods was different when compared to DB methods (Fig. 6). An irregular survey velocity along the transect could have positive unintended advantages: the higher number of frames displaying portions of seafloor characterized by highly dense communities populating hard bottoms or hosting specimens that are more difficult to detect (such as infauna inhabiting mobile substrates) can allow a more precise description of the community composition. During visual surveys, specimens may be not clearly recorded or visible but not easily identifiable in a few frames. Extracting more frames displaying the same specimens could increase the probability of having clearer images, facilitating the taxonomical identification. The comparison between the accuracy of TB methods in the detection of the taxonomical community composition and the coefficient of variation of velocity (CV, used as a proxy of ROV slowdown in correspondence of features of interest, Fig. 7a) suggests that the effect of speed variation on the taxonomical description may be related to the morphology of the habitat explored (e.g., Robert et al. 2020). The highest errors were registered in survey MS17_II_115, which presented the lowest number of ROV slowdowns along the transect (lowest CV value) and the highest velocity. The accuracy showed by TB methods in Station MS16_I_83, thus, suggests that a lower speed and a higher amount of slowdown along the transects may facilitate the detection of the taxonomical composition of biological communities in situations of patchily distributed habitats such as coralligenous outcrops. On the contrary, a regular velocity along the survey transect may instead be sufficient to correctly identify the community composition when exploring large habitat extensions, as the case of MS17_I_135.

Scatter plot showing the relationship between survey velocity and number of frames extracted with each method

(a, b, c) The figure shows the ROV velocity variation and the spatial distribution of frames extracted with tested techniques along the analyzed ROV transects. Colored bars represent the different substrate types characterizing the survey transect. Hard substrate, dark gray bars; mobile substrate, light gray bars; NA, white bars with red borders. Color distributions refer to frame densities obtained with the TB methods, while dashed lines represent frame distributions from the DB methods

(a) Scatter plot of the mean percentage error in detecting the taxonomical composition of biological communities resulting from the TB methods vs. the coefficient of variation of survey velocity. The latter was used as proxy of the variation of ROV velocity along the transect. (b) Scatter plot showing the significant positive correlation between the percentage of overlapped frames and percentage of taxa detected with each method. (c) Plot displaying the significant negative relationship between survey velocity and percentage of overlapped frames extracted with TB methods
Moreover, survey velocity plays an important role in the taxonomical identification accuracy of specimens by influencing the number of overlapped photograms. A larger amount of the latter was, indeed, documented in the slower surveys (Fig. 7b) that reported the higher community composition detection accuracies (Pearson correlation index: p = 0.86, Fig. 7c). Percentage overlap decreased with wider sampling intervals in both TM and DB method correlating with a decrease also in the accuracy of community composition detection. Although having fixed spatial intervals between frames along the track, DB selections showed similar or even higher degrees of overlap when compared to TB methods (Table 2). In some segments of the survey, the ROV moved for a few meters, turning around features of interest to collect more detailed images. Therefore, even frames extracted with an interval of 3 m displayed the same portion of the seafloor, producing the higher number of overlapped frames observed. This may potentially have concurred to obtain only slightly lower values of accuracies in community composition detection shown by DB methods when compared to TB values.
However, the survey speed and its variation along the transect may not have only positive or neutral consequences. TB methods show low accuracies in the estimation of substrate covering, with respect to DB methods. The coefficient of variation (CV) of speed was, indeed, positively correlated (p = 0.83) with the average percentage error in the substrate cover estimation reported by each tested interval (Fig. 8a). In patchily distributed habitats, performing the survey at high speed (i.e., Station MS17_II_115) or frequently varying the velocity along the transect (i.e., Station MS16_II_83) may influence the correct recording of seafloor sections in correspondence of habitat changes, potentially preventing the accurate mapping of their boundaries. On the contrary, in situations of large habitat extensions (Station MS17_I_135), maintaining a regular velocity along the transect may ensure an accurate estimation of substrate cover, with a corresponding decrease in the accuracy when using wider sampling intervals. In MS16_II_83 and MS17_II_115 stations, however, the error in substrates extension detection shows a counter-intuitive trend, reporting a decrease of error with wider sampling intervals (Table 3). The analysis of the coefficient of variation (CV) of the distances among frames, representing the variability of the distance between adjacent photograms, provides a potential explanation, showing a decrease with higher time intervals (Fig. 8b). In TB methods, the increase of sampling interval reduced the variation in the distance among the extracted frames, leading to a more homogenous distribution of photograms along the transect. The use of wider sampling intervals in stations MS16_II_83 and MS17_II_115 may potentially have concurred in reducing the negative influence of the survey speed on the substrates extents estimation.

(a) Scatter plot displaying the significant positive correlation between the mean percentage error in estimating the substrate covering extent reported in TB methods and the coefficient of variation of survey speed. (b) Bar plot showing the decrease of the variability of distance between adjacent frames with wider sampling TB intervals
3.2 Method Strengths and Weaknesses
The choice of the video frame extraction technique for the study of benthic marine ecosystems plays a pivotal role in governing the required analytic effort and, contemporarily, in ensuring the high quality of results. Nevertheless, the selection of the most appropriate frame extraction technique is strongly linked with data collection modalities. Our results showed that variations in ROV speed during the survey influence subsampling methodologies based on time intervals. Alternation of ROV slowdowns and speedups can potentially influence the precise mapping of the spatial limits of the different categories. The variation of survey velocity was, indeed, positively correlated with the error percentages in the estimations of substrate coverings, leading to an increased uncertainty of TB methods when dealing with habitats’ extent estimates. Maintaining a regular survey speed is of a paramount importance in ensuring a high efficiency in the substrate cover mapping. However, in situations with large survey velocity fluctuations, the use of wider sampling intervals may potentially reduce the negative influence of survey speed variations on the estimation of the habitat’s extents.
On the contrary, DB techniques showed higher accuracy in the estimation of substrate cover extent compared to TB, suggesting that frame extractions based on distance intervals are not affected by ROV navigation speed. The maximum percentage error of 0.3% for DB methods (Table 2) ensures higher confidence in the estimation of substrate cover extents, promoting these techniques as the most appropriate for this purpose.
However, habitat coverage is just one of the applications of visual survey methods. The analysis of community taxonomical compositions is fundamental in the framework of monitoring plans and directives, serving as the foundation for the evaluation of ecosystem status and functioning (e.g., Di Camillo et al. 2013; Grinyó et al. 2016; Chaniotis et al. 2020). TB methods showed higher efficiencies in detecting community’s taxonomical composition when compared to DB techniques extracting a similar number of frames.
An irregular survey speed along the track may lead to both a larger number of photograms and a higher amount of overlapped frames extracted with TB methods in correspondence of areas hosting highly dense communities, increasing the accuracy of these methods in the detection of the taxonomic composition. Consequently, the evidence provided suggest that TB methods represent the best approaches for the description of communities’ taxonomical composition, especially by using 4 s or 10 s intervals, which showed the lower estimation errors.
However, a larger dimension of frames subsets corresponded to higher taxa detection efficacies in both tested methodologies. But how much does it cost in terms of time?
On average, the 10 s and 1 m techniques missed 15.97% ± 5.99 and 17.14% ± 3.79 of total taxa from the analysis of 577 ± 54.45 and 760.33 ± 44.58 frames (Table 3), respectively, and with overlapping degrees close to 40%. Methodologies with the lower extraction intervals, 4 s and 0.5 m, showed higher accuracies in detecting the taxonomical composition of the communities (percentage errors: 7.29% ± 4.82 and 11.22% ± 1.98, respectively, Table 3), with an overlapping degrees of ca. 57%, and 1443.67 ± 136.71 and 1463 ± 54.06 extracted frames. Summing up, doubling of the frame number and, thus, of the analytical effort ensured a taxa identification error decrease of ca. 9% with the 4 s technique and ca. 6% with 0.5 m intervals. These accuracies’ increases are crucial for monitoring and experimental purposes, providing precise information on species abundances and the detection of rare taxa. Therefore, when a complete reporting of community composition is not required, intermediate-width frame extraction intervals (i.e., 10 s and 1 m) strongly reduce the analytical efforts in analyzing video surveys guaranteeing a relatively small error in the taxa detection.
Nevertheless, the technique for the analysis of benthic visual recordings collected with unmanned vehicles is related to the aims and the characteristics of the survey. Distance-based (DB) frame extraction methods provided a much higher efficiency in the estimation of the cover extent of the different substrate types, not being affected by vehicle speed variations during the sampling. On the contrary, the increase of frame density and overlapping degree in correspondence of features of interest partially explains the higher performances in documenting the biological community composition showed by time-based (TB) methods.
The recommendations provided are not meant to be a “one-size-fits-all” solution.
For instance, mesophotic-to-deep habitats may occur in vertical or steeply sloping bottoms where the GPS tracking position may not change substantially along the transects. In these situations, a homogenous representation of the explored seafloor in the final frame subset produced by using DB intervals based on plan view of the ROV track may result challenging. The application of DB methods on habitat of steeply sloping bottoms requires ad hoc techniques, such as the transect visualization and point generation along the track in 3D environments.
The comparable number of frames extracted by both TB and DB low, intermediate, and wide intervals, coupled with the percentage uncertainties in estimating the substrate cover and the taxonomical composition of biological communities provided by the results reported in this chapter, provides the context from which to choose the most efficient techniques for the purposes of analysis (e.g., TB methods for taxonomical composition detection and DB for substrate covering estimation), ensuring the comparison of surveys performed in different areas or time windows.
3.3 Future Directions
The wide range of advantages offered by remotely operated and autonomous vehicles, such as the possibility of high-definition mapping of biological communities and habitats at previously inaccessible depths, together with the rapid technological developments in the field and their increasing availability has enabled an increased use of these methods in the study and monitoring of benthic marine ecosystems. Visual recordings can provide information on substrate types, habitat architecture and biological community composition, allowing also to explore the relationships among organisms (Mueller et al. 2013). Despite the ease of collecting georeferenced image and videos by using underwater visual techniques, the analysis of images still typically requires manual processing by an expert in taxonomic identification. Therefore, new methods to process visual surveys faster are becoming protagonists. In the last decade, the use of automatic and semi-automatic methods to analyze benthic video recordings has become more frequent: machine learning and deep learning techniques for automated feature detection (e.g., Stokes and Deane 2009; Aguzzi et al. 2011; Teixidó et al. 2011), photogrammetric habitat reconstructions for the study of spatial patterns of assemblages on vertical walls (e.g., Robert et al. 2020 among others), and hyperspectral imaging for the taxonomic identification of benthic megafauna (Johnsen et al. 2016; Dumke et al. 2018; Foglini et al. 2019) are just a few of the recently implemented techniques. Thanks to these new intelligent and adaptive methods, it can be expected that the volume of high-resolution seabed mapping data will increase rapidly in the near future, opening exciting opportunities for new insights in mesophotic-to-deep ecology and consolidating the integration between automatic methods and scientific knowledge.
References
Aguzzi J, Costa C, Robert K, Matabos M, Antonucci F, Juniper SK, Menesatti P (2011) Automated image analysis for the detection of benthic crustaceans and bacterial mat coverage using the VENUS undersea cabled network. Sensors 11:10534–10556. https://doi.org/10.3390/s111110534
Angeletti L, Taviani M (2020) Offshore Neopycnodonte oyster reefs in the Mediterranean Sea. Diversity 12:92. https://doi.org/10.3390/d12030092
Angeletti L, Taviani M, Canese S, Foglini F, Mastrototaro F, Argnani A, Trincardi F, Bakran-Petricioli T, Ceregato A, Chimienti G (2014) New deep-water cnidarian sites in the southern Adriatic Sea. Mediterr Mar Sci 263–273
Angeletti L, Basso D, Bavestrello G, Bo M, Bracchi V, D’Ambrosio P, D’Onghia G, Fraschetti S, Grande V, Guarnieri G, Maiorano P, Savini A, Rizzo L, Taviani M (2017) Sottoprogramma 2.2 Monitoraggio dell’estensione dell’habitat a coralligeno. Giugno 2017:1–64. Unpublished Project Report.
Angeletti L, Bargain A, Campiani E, Foglini F, Grande V, Leidi E, Mercorella A, Prampolini M, Taviani M (2019) Cold-water coral habitat mapping in the Mediterranean Sea: methodologies and perspectives. In: Orejas C, Jiménez C (eds) Mediterranean cold-water corals: past, present and future: understanding the deep-sea realms of coral. Springer, Cham, pp 173–189
Angeletti L, Canese S, Cardone F, Castellan G, Foglini F, Taviani M (2020a) A brachiopod biotope associated with rocky bottoms at the shelf break in the Central Mediterranean Sea: geobiological traits and conservation aspects. Aquat Conserv: Mar Freshw Ecosyst 30:402–411. https://doi.org/10.1002/aqc.3255
Angeletti L, Prampolini M, Foglini F, Grande V, Taviani M (2020b) Cold-water coral habitat in the Bari Canyon system, Southern Adriatic Sea (Mediterranean Sea). In: Harris PT, Baker E (eds) Seafloor geomorphology as benthic habitat, 2nd edn. Elsevier, pp 811–824
Angeletti L, Castellan G, Montagna P, Remia A, Taviani M (2020c) The Corsica channel cold water Coral Province (Mediterranean Sea). Front Mar Sci. https://doi.org/10.3389/fmars.2020.00661
Ayma A, Aguzzi J, Canals M, Lastras G, Bahamon N, Mecho A, Company JB (2016) Comparison between ROV video and Agassiz trawl methods for sampling deep water fauna of submarine canyons in the northwestern Mediterranean Sea with observations on behavioural reactions of target species. Deep-Sea Res Pt I 114:149–159. https://doi.org/10.1016/j.dsr.2016.05.013
Beccari V, Basso D, Spazzaferri S, Rüggeberg A, Neuman A, Makovsky Y (2020) Preliminary video-spatial analysis of cold seep bivalve beds at the base of the continental slope of Israel (Palmahim disturbance). Deep-Sea Res Pt II 171:104664. https://doi.org/10.1016/j.dsr2.2019.104664
Bo M, Bava S, Canese S, Angiolillo M, Cattaneo-Vietti R, Bavestrello G (2014) Fishing impact on deep Mediterranean rocky habitats as revealed by ROV investigation. Biol Conserv 171:167–176
Bongaerts P, Ridgway T, Sampayo EM, Hoegh-Guldberg O (2010) Assessing the ‘deep reef refugia’ hypothesis: focus on Caribbean reefs. Coral Reefs 29:309–327. https://doi.org/10.1007/s00338-009-0581-x
Buhl-Mortensen L, Buhl-Mortensen P, Dolan MFJ, Dannheim J, Bellec V, Holte B (2012) Habitat complexity and bottom fauna composition at different scales on the continental shelf and slope of northern Norway. Hydrobiologia 685:191–219. https://doi.org/10.1007/s10750-011-0988-6
Cánovas-Molina A, Montefalcone M, Bavestrello G, Cau A, Bianchi CN, Morri C, Canese S, Bo M (2016) A new ecological index for the status of mesophotic megabenthic assemblages in the Mediterranean based on ROV photography and video footage. Cont Shelf Res 121:13–20. https://doi.org/10.1016/j.csr.2016.01.008
Carleton JH, Done TJ (1995) Quantitative video sampling of coral reef benthos: large-scale application. Coral Reef 14:35–46. https://doi.org/10.1007/BF00304070
Castellan G, Angeletti L, Taviani M, Montagna P (2019) The yellow coral Dendrophyllia cornigera in a warming ocean. Front Mar Sci 6:692. https://doi.org/10.3389/fmars.2019.00692
Cau A, Follesa MC, Moccia D, Alvito A, Bo M, Angiolillo M, Canese S, Paliaga EM, Orrù PE, Sacco F, Cannas R (2015) Deepwater corals biodiversity along roche du large ecosystems with different habitat complexity along the South Sardinia continental margin (CW Mediterranean Sea). Mar Biol 162:1865–1878. https://doi.org/10.1007/s00227-015-2718-5
Chaniotis PD, Robson LM, Lemasson AJ, Cornthwaite AL, Howell KL (2020) UK deep-sea conservation: progress, lessons learned, and actions for the future. Aquat Conserv: Mar Freshw Ecosyst 30:375–393. https://doi.org/10.1002/aqc.3243
Consoli P, Esposito V, Battaglia P, Altobelli C, Perzia P, Romeo T, Canese S, Andaloro F (2016) Fish distribution and habitat complexity on banks of the Strait of Sicily (Central Mediterranean Sea) from remotely-operated vehicle (ROV) explorations. PLoS One 11:e0167809. https://doi.org/10.1371/journal.pone.0167809
Conti LA, Lim A, Wheeler AJ (2019) High resolution mapping of a cold water coral mound. Sci Rep 9:1016. https://doi.org/10.1038/s41598-018-37725-x
Cordes EE, Carney SL, Hourdez S, Carney RS, Brooks JM, Fisher CR (2007) Cold seeps of the deep Gulf of Mexico: community structure and biogeographic comparisons to Atlantic equatorial belt seep communities. Deep-Sea Res Pt I 54:637–653. https://doi.org/10.1016/j.dsr.2007.01.001
Correa TBS, Grasmueck M, Eberli GP, Reed JK, Verwer K, Purkis SAM (2016) Variability of cold-water coral mounds in a high sediment input and tidal current regime, Straits of Florida. Sedimentology 59:1278–1304. https://doi.org/10.1111/j.1365-3091.2011.01306.x
Cvitanovic C, Hobday AJ, van Kerkhoff L, Wilson SK, Dobbs K, Marshall NA (2015) Improving knowledge exchange among scientists and decision-makers to facilitate the adaptive governance of marine resources: a review of knowledge and research needs. Ocean Coast Manage 112:25–35. https://doi.org/10.1016/j.ocecoaman.2015.05.002
Danovaro R, Canals M, Tangherlini M, Dell’Anno A, Gambi C, Lastras G, Amblas D, Sanchez-Vidal A, Frigola J, Calafat AM, Pedrosa-Pàmies R, Rivera J, Rayo X, Corinaldesi C (2017) A submarine volcanic eruption leads to a novel microbial habitat. Nat Ecol Evol 1:1–9. https://doi.org/10.1038/s41559-017-0144
Danovaro R, Fanelli E, Canals M, Ciuffardi T, Fabri M-C, Taviani M, Argyrou M, Azzurro E, Bianchelli S, Cantafaro A, Carugati L, Corinaldesi C, de Haan P, Dell’Anno A, Evans J, Foglini F, Galil B, Gianni M, Goren M, Greco S, Grimalt J, Güell-Bujons Q, Jadaud A, Knittweis L, Lopez JL, Sanchez-Vidal A, Schembri PJ, Snelgrove P, Vaz S, the IDEM Consortium (2020) Towards a marine strategy for the deep Mediterranean Sea: analysis of current ecological status. Mar Policy 112:103781. https://doi.org/10.1016/j.marpol.2019.103781
Davies AJ, Roberts JM, Hall-Spencer J (2007) Preserving deep-sea natural heritage: emerging issues in offshore conservation and management. Biol Conserv 138:299–312
Di Camillo CG, Boero F, Gravili C, Previati M, Torsani F, Cerrano C (2013) Distribution, ecology and morphology of Lytocarpia myriophyllum (Cnidaria: Hydrozoa), a Mediterranean Sea habitat former to protect. Biodivers Conserv 22:773–787. https://doi.org/10.1007/s10531-013-0449-9
Dumke I, Purser A, Marcon Y, Nornes SM, Johnsen G, Ludvigsen M, Søreide F (2018) Underwater hyperspectral imaging as an in situ taxonomic tool for deep-sea megafauna. Sci Rep 8:12860. https://doi.org/10.1038/s41598-018-31261-4
Eleftheriou A, McIntyre A (2005) Methods for the study of marine benthos. Blackwell, Oxford
Enrichetti F, Dominguez-Carrió C, Bavestrello G, Betti F, Canese S, Bo M, Patterson HM (2019) Megabenthic communities of the Ligurian deep continental shelf and shelf break (NW Mediterranean Sea). PLoS One 14:e0223949. https://doi.org/10.1371/journal.pone.0223949
Fabri M-C, Pedel L, Beuck L, Galgani F, Hebbeln D, Freiwald A (2014) Megafauna of vulnerable marine ecosystems in French Mediterranean submarine canyons: spatial distribution and anthropogenic impacts. Deep-Sea Res Pt II 104:184–207
Fabri M-C, Vinha B, Allais A-G, Bouhier M-E, Dugornay O, Gaillot A, Arnaubec A (2019) Evaluating the ecological status of cold-water coral habitats using non-invasive methods: an example from Cassidaigne canyon, northwestern Mediterranean Sea. Prog Oceanogr 178:102172. https://doi.org/10.1016/j.pocean.2019.102172
Foglini F, Grande V, Marchese F, Bracchi VA, Prampolini M, Angeletti L, Castellan G, Chimienti G, Hansen IM, Gudmundsen M, Meroni AN, Mercorella A, Vertino A, Badalamenti F, Corselli C, Erdal I, Martorelli E, Savini A, Taviani M (2019) Application of hyperspectral imaging to underwater habitat mapping, Southern Adriatic Sea. Sensors 19:2261. https://doi.org/10.3390/s19102261
Fosså JH, Mortensen PB, Furevik DM (2002) The deep-water coral Lophelia pertusa in Norwegian waters: distribution and fishery impacts. Hydrobiologia 471:1–12. https://doi.org/10.1023/A:1016504430684
Foster MS, Harrold C, Hardin DD (1991) Point vs. photo quadrat estimates of the cover of sessile marine organisms. J Exp Mar Biol Ecol 146:193–203. https://doi.org/10.1016/0022-0981(91)90025-R
Freiwald A, Beuck L, Rüggeberg A, Taviani M, Hebbeln D, R/V Meteor M70-1 Participants (2009) The white coral community in the Central Mediterranean Sea revealed by ROV surveys. Oceanography 22:58–57
Garrabou J, Ballesteros E, Zabala M (2002) Structure and dynamics of North-Western Mediterranean rocky benthic communities along a depth gradient. Estuar Coast Shelf Sci 55:493–508. https://doi.org/10.1006/ecss.2001.0920
Grasmueck M, Eberli GP, Viggiano DA, Correa T, Rathwell G, Luo J (2006) Autonomous underwater vehicle (AUV) mapping reveals coral mound distribution, morphology, and oceanography in deep water of the straits of Florida. Geophys Res Lett 33:L23616. https://doi.org/10.1029/2006GL027734
Grinyó J, Gori A, Ambroso S, Purroy A, Calatayud C, Dominguez-Carrió C, Coppari M, Lo Iacono C, López-González PJ, Gili J-M (2016) Diversity, distribution and population size structure of deep Mediterranean gorgonian assemblages (Menorca Channel, Western Mediterranean Sea). Prog Oceanogr 145:42–56. https://doi.org/10.1016/j.pocean.2016.05.001
Guinda X, Gracia A, Puente A, Juanes JA, Rzhanov Y, Mayer L (2014) Application of landscape mosaics for the assessment of subtidal macroalgae communities using the CFR index. Deep-Sea Res Pt II 106:207–215. https://doi.org/10.1016/j.dsr2.2013.09.037
Henry L-A, Roberts JM (2017) Global biodiversity in cold-water coral reef ecosystems. In: Rossi S, Bramanti L, Gori A, Orejas C (eds) Marine animal forests: the ecology of benthic biodiversity hotspots. Springer, Cham, pp 235–256
Howell KL, Davies JS, Narayanaswamy BE (2010) Identifying deep-sea megafaunal epibenthic assemblages for use in habitat mapping and marine protected area network design. J Mar Biol Assoc UK 90:33–68. https://doi.org/10.1017/S0025315409991299
Huvenne VAI, Tyler PA, Masson DG, Fisher EH, Hauton C, Hühnerbach V, Le Bas TP, Wolff GA (2011) A picture on the wall: innovative mapping reveals cold-water coral refuge in submarine canyon. PLoS One 6:e28755. https://doi.org/10.1371/journal.pone.0028755
Huvenne VAI, Bett BJ, Masson DG, Le Bas TP, Wheeler AJ (2016) Effectiveness of a deep-sea cold-water coral marine protected area, following eight years of fisheries closure. Biol Conserv 200:60–69. https://doi.org/10.1016/j.biocon.2016.05.030
Huvenne VAI, Robert K, Marsh L, Lo Iacono C, Le Bas T, Wynn RB (2019) ROVs and AUVs. In: Micallef A, Krastel S, Savini A (eds) Submarine geomorphology. Springer, Cham, pp 93–108
Innangi S, Tonielli R, Romagnoli C, Budillon F, Di Martino G, Innangi M, Laterza R, Le Bas T, Lo Iacono C (2019) Seabed mapping in the Pelagie Islands marine protected area (Sicily Channel, southern Mediterranean) using remote sensing object based image analysis (RSOBIA). Mar Geophys Res 40:333–355. https://doi.org/10.1007/s11001-018-9371-6
IUCN (2019) Thematic report – conservation overview of Mediterranean deep-sea biodiversity: a strategic assessment, 122 p. IUCN, Gland
Johnsen G, Ludvigsen M, Sørensen A, Aas LMS (2016) The use of underwater hyperspectral imaging deployed on remotely operated vehicles-methods and applications. IFAC-Papers Online 49(23):476–481. https://doi.org/10.1016/j.ifacol.2016.10.451
Langenkämper D, Simon-Lledó E, Hosking B, Jones DOB, Nattkemper TW (2019) On the impact of citizen science-derived data quality on deep learning based classification in marine images. PLoS One 14(6):e0218086. https://doi.org/10.1371/journal.pone.0218086
Leonard G, Clark R (1993) Point quadrat versus video transect estimates of the cover of benthic red algae. Mar Ecol Progr Ser 101:203–208. https://doi.org/10.3354/meps101203
Lundquist CJ, Granek EF (2005) Strategies for successful marine conservation: integrating socioeconomic, political, and scientific factors. Conserv Biol 19:1771–1778. https://doi.org/10.1111/j.1523-1739.2005.00279.x
Lundsten L, Schlining KL, Frasier K, Johnson SB, Kuhnz LA, Harvey JBJ, Clague G, Vrijenhoek RC (2010) Time-series analysis of six whale-fall communities in Monterey Canyon, California, USA. Deep-Sea Res Pt I 57:1573–1584. https://doi.org/10.1016/j.dsr.2010.09.003
Manea E, Bianchelli S, Fanelli E, Danovaro R, Gissi E (2020) Towards an ecosystem-based marine spatial planning in the deep Mediterranean Sea. Sci Tot Environ 715:136884. https://doi.org/10.1016/j.scitotenv.2020.136884
Meese RJ, Tomich PA (1992) Dots on the rocks: a comparison of percent cover estimation methods. J Exp Mar Biol Ecol 165:59–73. https://doi.org/10.1016/0022-0981(92)90289-M
Micheli F, Levin N, Giakoumi S, Katsanevakis S, Abdulla A, Coll M, Fraschetti S, Kark S, Koutsoubas D, Mackelworth P, Maiorano L, Possingham HP (2013) Setting priorities for regional conservation planning in the Mediterranean Sea. PLoS One 8:e59038. https://doi.org/10.1371/journal.pone.0059038
Mueller CE, Lundälv T, Middelburg JJ, van Oevelen D (2013) The Symbiosis between Lophelia pertusa and Eunice norvegica stimulates coral calcification and worm assimilation. PLoS One 8:e58660. https://doi.org/10.1371/journal.pone.0058660
Norcross BL, Mueter F-J (1999) The use of an ROV in the study of juvenile flatfish. Fish Res 39:241–251. https://doi.org/10.1016/S0165-7836(98)00200-8
Pech D, Condal AR, Bourget E, Ardisson P-L (2004) Abundance estimation of rocky shore invertebrates at small spatial scale by high-resolution digital photography and digital image analysis. J Exp Mar Biol Ecol 299:185–199. https://doi.org/10.1016/j.jembe.2003.08.017
Prampolini M, Angeletti L, Grande V, Taviani M, Foglini F (2020) Tricase Submarine Canyon: cold-water coral habitats in the southwesternmost Adriatic Sea (Mediterranean Sea). In: Harris PT, Baker E (eds) Seafloor geomorphology as benthic habitat, 2nd edn. Elsevier, pp 793–810
R Core Team (2013) R: a language and environment for statistical computing. R foundation for statistical computing, Vienna. http://www.R-project.org/
Rengstorf AM, Mohn C, Brown C, Wisz MS, Grehan AJ (2014) Predicting the distribution of deep-sea vulnerable marine ecosystems using high-resolution data: considerations and novel approaches. Deep-Sea Res Pt I 93:72–82. https://doi.org/10.1016/j.dsr.2014.07.007
Robert K, Jones DOB, Georgiopoulou A, Huvenne VAI (2020) Cold-water coral assemblages on vertical walls from the Northeast Atlantic. Divers Distrib 26:284–298. https://doi.org/10.1111/ddi.13011
Rowden AA, Anderson OF, Georgian SE, Bowden DA, Clark MR, Pallentin A, Miller A (2017) High-resolution habitat suitability models for the conservation and management of vulnerable marine ecosystems on the Louisville seamount chain, South Pacific Ocean. Front Mar Sci 4:335. https://doi.org/10.3389/fmars.2017.00335
Santín A, Grinyó J, Ambroso S, Uriz MJ, Dominguez-Carrió C, Gili JM (2019) Distribution patterns and demographic trends of demosponges at the Menorca Channel (Northwestern Mediterranean Sea). Progr Oceanogr 173:9–25 . https://doi.org/10.1016/j.pocean.2019.02.002
Savini A, Vertino A, Marchese F, Beuck L, Freiwald A (2014) Mapping cold-water coral habitats at different scales within the northern Ionian Sea (Central Mediterranean): an assessment of coral coverage and associated vulnerability. PLoS One 9:e87108. https://doi.org/10.1371/journal.pone.0087108
Savini A, Taviani M, Marchese F, Vertino A, Corselli C, Fabri M-C, Freiwald A, Sarrazin J (2017) Measuring growth structure of reef frameworks in Mediterranean deep-water coral-topped mounds. IMEKO TC19 Workshop on Metrology for the Sea (MetroSea 2017). Naples, Italy, 11–13 October 2017, pp 101–104
Stokes MD, Deane GB (2009) Automated processing of coral reef benthic images. Limnol Oceanogr-Meth 7:157–168. https://doi.org/10.4319/lom.2009.7.157
Taviani M, Angeletti L, Canese S, Cannas R, Cardone F, Cau A, Cau AB, Follesa MC, Marchese F, Montagna P, Tessarolo C (2017) The “Sardinian cold-water coral province” in the context of the Mediterranean coral ecosystems. Deep Sea Res Pt II 145:61–78
Taviani M, Angeletti L, Cardone F, Montagna P, Danovaro R (2019) A unique and threatened deep water coral-bivalve biotope new to the Mediterranean Sea offshore the Naples megalopolis. Sci Rep 9:3411. https://doi.org/10.1038/s41598-019-39655-8
Teixidó N, Albajes-Eizagirre A, Bolbo D, Hir EL, Demestre M, Garrabou J, Guigues L, Gili J-M, Piera J, Prelot T, Soria-Frisch A (2011) Hierarchical segmentation-based software for cover classification analyses of seabed images (Seascape). Mar Ecol Prog Ser 431:45–53. https://doi.org/10.3354/meps09127
Trotter J, Pattiaratchi C, Montagna P, Taviani M, Falter J, Threser R, Hosie A, Haig D, Foglini F, Hua Q, McCulloch M (2019) First ROV exploration of the Perth canyon: canyon setting, faunal observations, and anthropogenic impacts. Front Mar Sci 6:193. https://doi.org/10.3389/fmars.2019.00173
Vanreusel A, Hilario A, Ribeiro PA, Menot L, Arbizu PM (2016) Threatened by mining, polymetallic nodules are required to preserve abyssal epifauna. Sci Rep 6:1–6. https://doi.org/10.1038/srep26808
WoRMS Editorial Board (2020) Available online: http://www.marinespecies.org. Accessed 21 Apr 2020
Wynn RB, Huvenne VAI, Le Bas TP, Murton BJ, Connelly DP, Bett BJ, Ruhl HA, Morris KJ, Peakall J, Parsons DR, Summer EJ, Darby SE, Dorrel RM, Hunt JE (2014) Autonomous underwater vehicles (AUVs): their past, present and future contributions to the advancement of marine geoscience. Mar Geol 352:451–468. https://doi.org/10.1016/j.margeo.2014.03.012
Zampoukas N, Palialexis, A Duffek J, Graveland G, Giorgi C, Hagebro G, Hanke S, Korpinen M, Tasker V. Tornero, V, Abaza P, Battaglia M, Caparis R, Dekeling M, Frias Vega, M. Haarich S, Katsanevakis H, Klein W, Krzyminski M, Laamanen JC, Le Gac JM, Leppanen U, Lips T, Maes E, Magaletti S, Malcolm JM, Marques O, Mihail R, Moxon C, O’Brien P, Panagiotidis M, Penna C, Piroddi WN, Probst S, Raicevich B, Trabucco L, Tunesi S, van der Graaf A, Weiss, AS, Wernersson W, Zevenboom, Technical guidance on monitoring for the Marine Strategy Framework Directive (2014) European Commission EUR 26499 – Joint Research Centre – Institute for Environment and Sustainability. Publications Office of the European Union, Luxembourg, pp 1–166. https://doi.org/10.2788/70344
Acknowledgments
We thank captain, crew, and scientific staff of R/V Minerva Uno for their skillful and efficient cooperation during operations at sea. This paper has been finalized at the time of the COVID-19 pandemics. English language kindly revised by Michael Marani. We acknowledge an anonymous reviewer, which helped to improve the clarity of this manuscript. This is ISMAR-Bologna scientific contribution n. 2025.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Castellan, G., Angeletti, L., Correggiari, A., Foglini, F., Grande, V., Taviani, M. (2020). Visual Methods for Monitoring Mesophotic-to-Deep Reefs and Animal Forests: Finding a Compromise Between Analytical Effort and Result Quality. In: Rossi, S., Bramanti, L. (eds) Perspectives on the Marine Animal Forests of the World. Springer, Cham. https://doi.org/10.1007/978-3-030-57054-5_15
Download citation
DOI: https://doi.org/10.1007/978-3-030-57054-5_15
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-57053-8
Online ISBN: 978-3-030-57054-5
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)