
Abstract
In this study, the analysis method of synchronous vibration in turbine blades is developed. Blade tip timing (BTT) data measured by non-contact sensors is analyzed by the proposed method. The time of arrivals (TOA) of each blade when it passes the sensors are converted to the blade tip displacements in real time. Then the vibration data is smoothed by applying the filtering techniques. When the blade resonates, the smoothed data around peak points is represented by fitting curve based on the single degree of freedom vibration model. In synchronous vibration, the excitation frequency is an integer multiple of the rotation frequency, and the integer is called an engine order. Since the engine orders have the same value for each sensor, the proposed method determines the estimated engine orders when there is an integer value that minimizes the sum of the difference between the phase angles of the reference point when the blades pass the measuring sensors. Blade vibration simulator, based on the vibration modeling of the rotating blade, is also developed and used to verify the proposed method. Using the proposed method, the blade vibration parameters such as engine order, amplitude, phase, and damping factor can be identified.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Blade tip timing
- Blade vibration simulator
- Noncontact measurement
- Parameter identification
- Curve fitting
1 Introduction
Blade tip timing (BTT) method analyzes the vibration characteristics of compressor and turbine blades using noncontact sensors. BTT sensors measure the time of arrivals (TOA) of each blade when it passes the sensors [1]. TOAs are converted to the blade tip displacements compared to the theoretical passing time had it not been any vibration in the system. BTT method requires a complicated signal processing algorithm because it generates a non-uniform undersampled signal, so the various studies for developing the BTT data processing methods have been recently carried out [2,3,4,5]. The vibration response that occurs in a blade-disk system is classified into two independent forms, synchronous and asynchronous [2]. Synchronous vibration is induced by an excitation frequency corresponding to a multiple of the rotating speed by an integer [3, 4], while asynchronous vibration is induced by an excitation frequency, mainly due to aerodynamic instability such as rotating stall and flutter [5], corresponding to a multiple of the rotating speed by non-integer.
There have been some studies on the vibration analysis methods for blade tip timing data. Dimitriadis [3] compared three analysis methods by applying and formulating the simulation data to the tip timing problem. All of the methods they compared satisfy the reliable accuracy with quite low noise. However, the results were highly dependent on the noise levels. Rigosi [4] modified the existing two parameter plot methods that extract vibration results from data obtained by at least two sensors.
In this study, a new algorithm which makes use of given blade tip timing data to characterize the synchronous blade vibration is provided. First, curve fitting of data in the target RPM section of each sensor and each blade is made by the curve defined according to single degree of freedom (SDOF) theory. This gives the instantaneous amplitude, the resonant frequency, the oscillation phase, and the Q factor of the individual blades at the peak point. The engine order is then estimated using the phase information obtained above. Theoretically, dividing the phase difference of each sensor by the sensor angle difference determines the engine order. However, for real signals, it is impossible to estimate the engine order in this way due to various circumstances. Lastly, the newly proposed engine order estimation method is carried out through this study. Even though each sensor observes the blades passing time at different locations, while they measure different phases, they are actually the same at the reference point. An integer value that minimizes the difference between phases at the reference point for each sensor determines the engine order estimate.
2 Blade Vibration Analysis Method
The proposed method consists of five major stages: acquisition of raw data measured by sensors fixed to the casing, deriving the timing data of the blades from the pulse data, deriving the dynamic or static displacement every moment of arrival, smoothing the displacement data, and identifying various vibration parameters reflecting the vibration characteristics of the blade-disc system. In this study, the identification methods of blade vibration parameters are proposed and applied. The proposed method performs curve fitting around the point where the vibration displacement is particularly large, that is, the point where resonance sweeping is assumed, in the smoothed blade tip displacement versus RPM diagram. Generally, it is desirable to select the 500RPM region around the RPM where the resonance sweeping occurs. The vibration characteristics of the blades can be obtained by the proposed model.
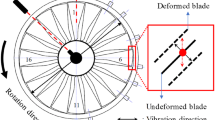
Figure 1 shows the blade tip timing measurement system. When the blades are rotating, they pass the static sensors attached to the case. Then the TOAs of all blades can be obtained from the sensors as shown in Fig. 2. The red lines indicate the real measured time with vibration, while the blue dot lines indicate the theoretical time without vibration. The theoretical TOAs can be defined by the following equation:
where T k is the measured TOAs, Nis the number of blades, and ω is the rotor speed. The gap between two TOAs which determine how much the blades vibrate is converted to the tip displacement data. Then the displacement data is smoothed by applying the moving average and median filtering techniques. When the blade resonates, the smoothed data around peak points is represented by fitting curve. The method follows the theory of nonlinear curve fitting. For nonlinear curve fitting, one needs to specify the initial values of each parameter. The fitting result is very sensitive depending on which value is specified as the initial value. The proposed method generates one analysis result for each sensor in the start section. Assuming that theoretically there is an infinite number of sensors, enveloping the measured data from them will have the same result as the actual time trend. When the data values of one sensor are connected based on the single degree of freedom (SDOF) theory, it becomes a curved shape, which is defined as the SDOF regression curve. The regression curve is a nonlinear regression curve with four parameters. In other words, it is the core of this method to obtain the four fitting parameters when the blades resonate. Vibration amplitudes, phase angles, resonant rotor speeds, and damping factors are the main four parameters.

Blade tip timing measurement system

Time of arrival data obtained from the sensors
3 Numerical Results and Discussions
Figure 3 shows the results of fitting between proposed method and commercial software. The vibration data near resonance RPM measured by four eddy current sensors shows the same resonance RPM. It is clear that the results between the proposed method and commercial software have good agreement. The vibration parameters such as amplitude, phase, resonance RPM, and Q-factor are tabulated in Table 1. Only sensor #2 shows the quite low amplitude compared to the other sensors. It is presumed that the difference is due to an error in the gap measurement between the sensor and the blade. Differences between phase angles for sensors are so nature that they can be applied to determine the system engine order. Theoretically, the engine orders have the same value for each sensor, so the proposed method determines the estimated engine order when there is an integer value that minimizes the sum of the difference between the reference point phase values of the sensors for an integer value. We can determine the specific engine order by selecting the mode from the estimated values from all blades.

Blade displacement and fitting curve
4 Conclusion
In this study, the synchronous vibration analysis method was developed based on the curve fitting theory. Nonlinear curve fitting based on single degree of freedom vibration model was applied to the measured tip timing data of rotating blades. The proposed method was validated by comparing the fitting graphs to those obtained by the commercial software. Various blade parameters such as the amplitude, the resonant frequency, the oscillation phase, and the Q factor of the individual blades were obtained at the peak point. The engine order was then estimated using the phase information obtained above. The proposed method can be applied to the vibration monitoring system.
References
Heath, S., Imregun, M.: An improved single-parameter tip-timing method for turbomachinery blade vibration measurements using optical laser probes. Int. J. Mech. Sci. 38(10), 1047–1058 (1996)
Zielinski, M., Ziller, G.: Noncontact vibration measurements on compressor rotor blades. Meas. Sci. Technol. 11, 847–856 (2000)
Dimitriadis, G., Carrington, I.B., Wright, J.R., Copper, J.E.: Blade-tip timing measurement of synchronous vibrations of rotating bladed assemblies. Mech. Syst. Signal Process. 16(4), 599–622 (2002)
Liu, C., Jiang, D.: Improved blade tip timing in blade vibration monitoring with torsional vibration of the rotor. J. Phys. Conf. Ser. 364, 012136 (2012)
Yue, L., Liu, H., Zang, C., Wang, D., Hu, W., Wang, L.: The parameter identification method of blade asynchronous vibration under sweep speed excitation. J. Phys. Conf. Ser. 744, 012051 (2016)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this paper

Cite this paper
Oh, Y., Yoo, H.H., Kim, Y. (2021). Synchronous Blade Vibration Analysis Using Blade Tip Timing Method. In: Oberst, S., Halkon, B., Ji, J., Brown, T. (eds) Vibration Engineering for a Sustainable Future. Springer, Cham. https://doi.org/10.1007/978-3-030-46466-0_19
Download citation
DOI: https://doi.org/10.1007/978-3-030-46466-0_19
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-46465-3
Online ISBN: 978-3-030-46466-0
eBook Packages: EngineeringEngineering (R0)