
Abstract
We propose an application of the new monotone embedded discrete fracture method (mEDFM) [13] to the two-phase flow model. The new method for modelling of flows in fractured media consists in coupling of the embedded discrete fracture method (EDFM) with the nonlinear monotone finite volume (FV) scheme with two-point flux approximation, which preserves non-negativity of the discrete solution. The resulting method combines effectiveness and simplicity of the standard EDFM approach with accuracy and physical relevance of the nonlinear FV schemes for non-orthogonal grids and anisotropic media. Numerical experiments show that the two-phase flow modelling with the mEDFM provides much more accurate solution compared to the conventional EDFM, and is in a good agreement with the discrete fracture method, which directly applies the nonlinear FV method to a grid with fractures explicitly represented by 3D cells.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Finite volume method
- Nonlinear discretization scheme
- Fracture modelling
- Embedded discrete fracture model
- Flows in porous media
- Two-phase flows
MSC (2010)
1 Introduction
A significant amount of world’s hydrocarbon reserves lies in reservoirs with fractures of various length scales.
One of popular methods of accounting fractures is the embedded discrete fractures method (EDFM). The method was first proposed in [7] as a hierarchical approach to modelling fractures in porous media. Small fractures were accounted implicitly by their effective properties, while large fractures were considered explicitly. This method can be coupled with any approach such as the dual-porosity dual-permeability method and others. The idea of representing large-scale fractures by embedded grids independent of the reservoir grids was presented in [8]. The family of EDFM methods was further developed in [4, 5, 10].
In EDFM fractures are considered as surfaces with prescribed apertures, and the connecting term between fractures and surrounding rock matrix can be derived by dimensionality reduction [6].
The original EDFM was proposed for the structured grid and isotropic media, thus the conventional linear two-point flux approximation (TPFA) scheme was used for all discrete fluxes. However, it is well known that the linear TPFA lacks approximation on non-\(\mathbb {K}\)-orthogonal grids. One popular alternative to the linear TPFA is the linear multi-point flux approximation [1], which is second-order accurate, but may be non-monotone for the cases with anisotropic media, which often coexists with fractures.
In our previous work [13] we proposed the monotone embedded discrete fractures method (mEDFM) which couples the original EDFM approach with two advanced nonlinear schemes: the monotone two-point flux approximation (NTPFA) [3] and the compact multi-point flux approximation (NMPFA) satisfying the discrete maximum principle (DMP) [2, 9]. The importance of the monotone and DMP schemes for the multi-phase flow models was studied in [11].
In this paper we consider the application of the mEDFM to the two-phase flows in porous media and compare the results with the original EDFM and with the discrete fracture method, which assumes explicit representation of fractures by the computational grid and uses the similar nonlinear scheme for the flux discretization.
2 Two-Phase Flow Model
The basic equations for the two-phase flow in a domain \(\varOmega \subset \mathbb {R}^3\) are the following:
-
1.
Mass conservation for each phase:
$$\begin{aligned} \frac{\partial \rho _{\alpha } \varphi S_{\alpha }}{\partial t} + \text{ div } \left( \rho _{\alpha } \mathbf {u}_{\alpha } \right) = q_{\alpha }, \quad \alpha = w,o. \end{aligned}$$(1) -
2.
Darcy’s law:
$$\begin{aligned} \mathbf {u}_{\alpha } = -\lambda _{\alpha }\mathbb {K}\left( \nabla p_{\alpha } - \rho _{\alpha } g \nabla z\right) , \quad \alpha = w,o. \end{aligned}$$(2) -
3.
Two fluids fill the voids:
$$\begin{aligned} S_w + S_o = 1. \end{aligned}$$(3) -
4.
Pressure difference between phases is given by the capillary pressure \(p_c = p_c (S_w)\):
$$\begin{aligned} p_o - p_w = p_c. \end{aligned}$$(4)
Here \(\mathbb {K}\) is the absolute permeability tensor, \(\varphi (p)\) is the porosity, g is the gravity term, z is the depth. For the phase \(\alpha \) we have denoted: the pressure \(p_{\alpha }\) (unknown), the saturation \(S_{\alpha }\) (unknown), the Darcy’s velocity \(\mathbf {u}_{\alpha }\) (unknown), the density \(\rho _{\alpha }(p) = \rho _{\alpha ,0} / B_{\alpha }(p)\), the formation volume factor \(B_{\alpha }(p)\), the mobility \(\lambda _\alpha (p,S) = k_{r \alpha }(S) / \mu _{\alpha }(p)\), the relative permeability \(k_{r \alpha }(S)\), the viscosity \(\mu _{\alpha }(p)\), and the source/sink well term \(q_{\alpha }\) (e.g. the injector or producer wells).
For the boundaries we consider no-flow condition, and for the wells the simple Peaceman formula is used [14]. For a cell T with center \(\mathbf {x}_T\) connected to the well we have:
where \(p_{bh}\) is the bottom hole pressure, \(z_{bh}\) is the depth of the bottom hole, WI is the well index, which does not depend on the properties of fluids, but depends on the properties of the media, \(\delta \) is the Dirac delta function.
3 Embedded Discrete Fracture Method
For representation of the fractured reservoir we use two types of media: the matrix domain \(\varOmega ^m \subset \mathbb {R}^3\) and the fractures domain \(\varOmega ^f \subset \mathbb {R}^3\) represented by \(n_f\) virtual domains \(\varOmega ^f = \bigcup \limits _{i=1}^{n_f} \varOmega ^{f,i}\).
Each fracture \(\varOmega ^{f,i}\) is considered as the surface extruded on the fracture aperture \(w_{f,i}\). We assume that the fractures permeability and porosity are significantly larger than that of the porous media.
Next we define mass balance equation (1) for each of the domains \(\varOmega ^m\), \(\varOmega ^f\) [5]:
where \(\mathbf {u}^{mm}_{\alpha }\) is the cell-to-cell Darcy’s flux identical to (2) for pressure \(p^m\) and saturation \(S^m\) defined in the matrix, \(\mathbf {u}^{ff}_{\alpha }\) is the similar flux for the fractures domain for unknowns \(p^f\) and \(S^f\) defined in fractures, and \(\mathbf {u}^{mf}_{\alpha } = -\mathbf {u}^{fm}_{\alpha }\) is the additional flow between the matrix and the fractures.
On the discrete level, for each grid cell T there is a set of the matrix unknowns \(p^m_{\alpha ,T}\), \(S^m_{\alpha ,T}\), and \(n_{f,T}\) fracture unknowns \(p^f_{\alpha ,f_i}\), \(S^f_{\alpha ,f_i}\), where \(n_{f,T}\) is the number of fractures \(F_i\) inside the cell.

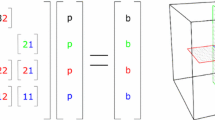
Darcy fluxes for a fracture in porous media: cell-to-cell (green), cell-to-fracture (blue) and intra-fracture (red) exchanges
The fully implicit scheme is used for the solution of the coupled equations. For the spatial discretization we use the finite volume method, however instead of one flux we need to approximate three types of fluxes \(\mathbf {u}^*\) in Eqs. (6) and (7), which are schematically presented in Fig. 1. We use the following space discretizations for the fluxes (colors correspond to the ones in the figure):
-
For the cell-to-cell flux between cells \(T_+\) and \(T_-\) we use the nonlinear TPFA scheme [3] both for the pressure (including capillary) and the gravity terms:
$$\begin{aligned} \text{ div } \left( \rho _{\alpha } \mathbf {u}^{mm}_{\alpha } \right)&\approx \text{ upw }\Big [ \rho ^{n+1}_{\alpha }(p^m) \lambda ^{n+1}_{\alpha }(S^m,p^m), ~\big (M_+(p^m) p^m_+ - M_-(p^m) p^m_-\big )\Big ]\nonumber \\&\,-\text{ upw }\Big [ \rho ^{n+1}_{\alpha }(p^m) \lambda ^{n+1}_{\alpha }(S^m,p^m), ~\big (M_+(z) \rho _+ g z_+ - M_-(z) \rho _- g z_-\big )\Big ]. \end{aligned}$$ -
For the fracture-to-cell flux within cell T we use the conventional linear TPFA:
$$\begin{aligned} \text{ div } \left( \rho _{\alpha } \mathbf {u}^{mf}_{\alpha } \right)&\approx \text{ upw }_{mf}\Big [ \rho ^{n+1}_{\alpha }(p) \lambda ^{n+1}_{\alpha }(S,p), ~M^{mf}_T\left( p^m - p^f\right) \Big ]\nonumber \\&\,-\text{ upw }_{mf}\Big [ \rho ^{n+1}_{\alpha }(p) \lambda ^{n+1}_{\alpha }(S,p), ~M^{mf}_T\left( \rho _m g z_m - \rho _f g z_f\right) \Big ].\nonumber \end{aligned}$$ -
For the intra-fracture flux between virtual fracture cells \(T_{-,i}\) and \(T_{+,i}\) (intersection of the fracture \(F_i\) with cells \(T_-\) and \(T_+\), respectively) we also use the linear TPFA:
$$\begin{aligned} \text{ div } \left( \rho _{\alpha } \mathbf {u}^{ff}_{\alpha } \right)&\approx \text{ upw }\Big [ \rho ^{n+1}_{\alpha }(p^f) \lambda ^{n+1}_{\alpha }(S^f,p^f), ~M^{ff}\left( p^f_+ - p^f_-\right) \Big ]\nonumber \\&\,-\text{ upw }\Big [ \rho ^{n+1}_{\alpha }(p^f) \lambda ^{n+1}_{\alpha }(S^f,p^f), ~M^{ff}\left( \rho _+ g z_+ - \rho _- g z_-\right) \Big ].\nonumber \end{aligned}$$
Here, \(M_{\pm }(p)\) are the coefficients of the nonlinear discretization scheme, \(M^*\) are the EDFM coefficients presented in [13], and ‘upw’ are the upwind functions:
The resulting system of algebraic equations is nonlinear due to nonlinearity of the two-phase flow model, and the Newton method is used to solve it. Using the nonlinear flux discretization scheme does not introduce additional complexity for the nonlinear solver. However, in spite of being formally two-point, the nonlinear scheme produces a multi-point stencil for the Jacobian matrix, which results in more expensive linear system solution (on average, extra 25–100%) compared to the linear TPFA scheme. For more details about the Newton method and the construction of the Jacobian matrix for the nonlinear scheme we refer to [12].
4 Numerical Experiment for Two-Phase Flow
For the numerical experiment we simulate the two-phase flow for a standard five-spot problem with two wells in the opposite corners of a rectangular domain, and add two fractures as shown in Fig. 2.

Setup for the five-spot problem with two fractures
The permeability tensor for the porous media is full anisotropic:
where \(k_1 = 10^3 \text {~[md]}, ~k_2 = k_3 = 10^2 \text {~[md]}, ~\alpha = \frac{\pi }{4} \), and the porosity is \(\phi ^m = 0.15\).
The permeability tensor for the fractures is scalar \(\mathbb {K}^f = k^f\mathbb {I},\; k^f = 10^6\) [md], \(w_f = 0.13\) [ft] and the porosity is \(\phi ^f = 0.15\).
Domain dimensions are: \([0,100]\times [0,100]\times [0,10]\) ft. Tables for capillary pressure and relative permeabilities are similar to the two-phase flow experiments from [12]. For the wells we set the bottom hole pressures \(p_{inj} = 4100\) [psi] and \(p_{prod} = 3900\) [psi]. The initial pressure is \(p_0 = 4000\) [psi], and the initial saturation is \(S_0 = 0.15\).
We simulate water injection for 90 days with time step \(\Delta t=1\) day and compare three solutions: (1) the EDFM solution with the linear TPFA discretization for all flux types, (2) the mEDFM solution with the NTPFA discretization, and (3) the discrete fracture method (DFM-FV) solution with the NTPFA scheme, which directly applies the original FV discretization for the mesh with cut-cells and a thin layer of 3D cells representing the fracture.

Oil and water rates for EDFM, mEDFM (NTPFA) and DFM-FV (NTPFA) solutions
Water and oil rates for the producer well are shown in the Fig. 3. The mEDFM and the DFM-FV schemes produce very close results with similar rates and breakthrough times since the NTPFA scheme provides the approximation for non-\(\mathbb {K}\)-orthogonal grids. On the contrast, the original EDFM provides a different solution, with 40% larger breakthrough time.
Figure 4 shows the oil pressure and the water saturation fields at the time \(T=45\) days. One can see that the mEDFM (NTPFA) and the DFM-FV methods produce almost identical results, whereas the EDFM solution is noticeably different from them. It should be noted that the DFM-FV requires grid modification to take fractures into account explicitly, which may complicate the reservoir simulation. The mEDFM provides a viable alternative.

Oil pressure (left) and water saturation (right) fields for the two-phase flow, T \(=\) 45 days. Top: EDFM solution; middle: mEDFM (NTPFA) solution; bottom: DFM-FV (NTPFA) solution
5 Conclusion
We present the application of the new monotone embedded discrete fracture method (mEDFM) for the two-phase flows in fractured media. The method combines the EDFM approach with the monotone nonlinear two-point flux approximation.
Numerical experiments show that in anisotropic media the two-phase flow modelling with the mEDFM provides the accurate solution (in contrast to the conventional EDFM), and is in a good agreement with the discrete fracture method, which assumes explicit representation of the fractures by the grid.
References
Aavatsmark, I., Eigestad, G., Mallison, B., Nordbotten, J.: A compact multipoint flux approximation method with improved robustness. Num. Meth. Part. D. E. 24(5), 1329–1360 (2008)
Chernyshenko, A., Vassilevski, Y.: A finite volume scheme with the discrete maximum principle for diffusion equations on polyhedral meshes. In: Finite Volumes for Complex Applications VII-Methods and Theoretical Aspects, pp. 197–205. Springer, Berlin (2014)
Danilov, A., Vassilevski, Y.: A monotone nonlinear finite volume method for diffusion equations on conformal polyhedral meshes. Russ. J. Numer. Anal. Math. Model. 24(3), 207–227 (2009)
Hajibeygi, H., Karvounis, D., Jenny, P.: A hierarchical fracture model for the iterative multiscale finite volume method. J. Comput. Phys. 230, 8729–8743 (2011)
Jiang, J., Younis, R.: An improved projection-based embedded discrete fracture model (pEDFM) for multiphase flow in fractured reservoirs. Adv. Water Resour. 109, 267–289 (2017)
Kumar, K., List, F., Pop, I., Radu, F.: Formal upscaling and numerical validation of fractured flow models for richards equation. J. Comput. Phys. 407, 109138 (2019)
Lee, S.H., Lough, M.F., Jensen, C.L.: Hierarchical modeling of flow in naturally fractured formations with multiple length scales. Water Resour. Res. 37(3), 443–455 (2001)
Li, L., Lee, S.H.: Efficient field-scale simulation of black oil in a naturally fractured reservoir through discrete fracture networks and homogenized media. SPE Reserv. Eval. Eng. 11, 750–758 (2008)
Lipnikov, K., Svyatskiy, D., Vassilevski, Y.: Minimal stencil finite volume scheme with the discrete maximum principle. Russ. J. Numer. Anal. Math. Modelling 27(4), 369–385 (2012)
Moinfar, A., Varavei, A., Sepehrnoori, K., Johns, R.T.: Development of an efficient embedded discrete fracture model for 3D compositional reservoir simulation in fractured reservoirs. SPE J. 19(2), 289–303 (2014)
Nikitin, K., Novikov, K., Vassilevski, Y.: Nonlinear finite volume method with discrete maximum principle for the two-phase flow model. Lobachevskii J. Math. 37(5), 570–581 (2016)
Nikitin, K., Terekhov, K., Vassilevski, Y.: A monotone nonlinear finite volume method for diffusion equations and multiphase flows. Comput. Geosci. 18(3–4), 311–324 (2014)
Nikitin, K., Yanbarisov, R.: Monotone embedded discrete fractures method for flows in porous media. J. Comput. Appl. Math. 364, 112353 (2020)
Peaceman, D.W.: Interpretation of well-block pressures in numerical reservoir simulation. SPE J. 18(3), 183–194 (1978)
Acknowledgements
The development of the monotone embedded discrete fracture method was supported by Russian Foundation for Basic Research, project number 19-31-90110. The development of the two-phase flow numerical model and the mesh modification method for DFM-FV was supported by Moscow Center for Fundamental and Applied Mathematics (agreement with the Ministry of Education and Science of the Russian Federation No. 075-15-2019-1624).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 The Editor(s) (if applicable) and The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Nikitin, K.D., Yanbarisov, R.M. (2020). Monotone Embedded Discrete Fracture Method for the Two-Phase Flow Model. In: Klöfkorn, R., Keilegavlen, E., Radu, F.A., Fuhrmann, J. (eds) Finite Volumes for Complex Applications IX - Methods, Theoretical Aspects, Examples. FVCA 2020. Springer Proceedings in Mathematics & Statistics, vol 323. Springer, Cham. https://doi.org/10.1007/978-3-030-43651-3_52
Download citation
DOI: https://doi.org/10.1007/978-3-030-43651-3_52
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-43650-6
Online ISBN: 978-3-030-43651-3
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)