
Abstract
Work-related musculoskeletal disorders (WMSD) have been progressively increasing. Specifically, Low back disorders (LBD) are the most predominant of all musculoskeletal disorders. In order to reduce the incidence of these problems, new auxiliary devices called exoskeletons have been introduced. This work provides a real context study of a back-support exoskeleton on industrial tasks in a furniture manufacturing company. The perception of eight participants regarding their experience with a passive back exoskeleton Laevo® was measured through a questionnaire that includes the assessment of perception of range of motion, reduction of backloading, interference with the task, overall physical effort, and discomfort. We also meresured the electromyography for the back muscles of five participants who performed an industrial task. Psychophysical results show that the exoskeleton gives back support. However, it also interferes with the execution of the task, limits movements, increases the overall effort and causes discomfort in the neck, shoulders, thoracic region, lumbar region and hips, and thighs. Electromyographic results show a decrease in muscle activity between 0.8 and 3.8% of the back muscles when wearing the exoskeleton. In conclusion, the exoskeleton used in this study does not seem appropriate for industrial tasks with a great diversity of movements.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
1 Introduction
The number of cases of work-related musculoskeletal disorders (WMSD) have been progressively increasing in industrialized societies [1]. Specifically, Low back disorders (LBD) are the most predominant of all musculoskeletal disorders [2]. The occurrence of work-related LBD is a complex condition that involves contributions from both personal and work-related factors, among others lifting and carrying of loads and awkward body postures like trunk flexion and rotation [3]. Many preventive measures have been proposed in order to reduce the occurrence of LBD, such as adjustments of workstations, specific training in task execution and the use of mechanical aids [4].
In order to reduce the incidence of these problems, new auxiliary devices called exoskeletons have been introduced. An exoskeleton is a wearable device supporting the human to produce the physical power required for manual tasks [5].
Exoskeletons, according to the articulation mechanism, can be classified into two types: ‘active‘ and ‘passive’. The first type has one or more power-capable mechanisms (such as electric motors and hydraulic cylinders) that actively increase the power of the human body. The second one uses materials with elasticity or viscosity, such as springs or shock absorbers, which have the ability to accumulate energy from human movements and discharge it to assist users with a particular movement [6].
Active systems with an industrial purpose are being developed, but these are mainly in a laboratory stage now. The passive devices are already being studied and some are already being implemented in the workplace [5]. These include the Personal Lift Assist Device® (PLAD) and Laevo®. For the PLAD®, significant reductions on back muscle activity during lifting has been reported [7, 8] and during static bending [2]. For the Laevo®, the back-muscle activity and discomfort were studied in a simulated assembly task. It has found a decrease in muscle activity between 35 and 38% and lower discomfort in the low back when wearing the exoskeleton.
Most of the previous studies [1, 5, 7, 8] evaluated this type of equipment in simulated tasks in a laboratory. Therefore, there is still some controversy regarding the use in real work context. Therefore, with the current study we aim to assess the effect of a passive exoskeleton on WMSD risk factors in industrial trunk bending tasks in a furniture manufacturing industry in Portugal. For this purpose, qualitative and quantitative data were collected, namely: (i) psychophysical assessment of the exoskeleton’s use; and (ii) surface electromyography (EMG) assessment before and during the use of a passive back support exoskeleton.
2 Methods
2.1 Subjects and Industrial Tasks Studied
All participants were experienced workers from a large furniture manufacturing industry from Portugal. In this study, for each assessment trial distinct samples were considered. The psychophysical test included seven healthy participants (five males, two females; mean age was 33 ± 11 years old; mean body mass was 69.45 ± 14.04 kg and mean height 1.74 ± 0.07 m). The EMG assessment included five healthy participants (two males and three females; mean age was 29 ± 8 years old; mean body mass was 76.00 ± 14.64 kg and mean height 1.65 ± 0.13 m) also volunteered to participate in this study. All participants were introduced to the exoskeleton before the trials. None of the participants reported low back pain in the previous three months. Subjects signed an informed consent after the experimental trials.
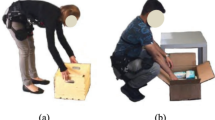
In this work, we include three different tasks chosen by the company managers considering the nature of the tasks (manual handling loads with constant back flexion). The first task consisted of palletizing wooden pieces (weight between 2 and 4 kg) coming from a conveyor belt about 0.3 m from the floor to a pallet that was on top of a stacker. The worker flexed frontally and laterally the trunk in order to lift the pieces. Sometimes this handling was performed with only one hand (Fig. 1a).

Industrial tasks assessed: a Task 1: palletizing; b Task 2: wood slat adjustment; c Task 3: visual inspection of wooden boarders
The second task consisted of adjusting wooden slats coming from a cutting machine by pulling the slats so that the end of the slats coincided with the pallet limit. During this adjustment, the employee flexed the trunk to be able to pick it up to two-thirds of its length. The filled pallet was moved using a pallet truck and a new pallet was put in place (Fig. 1b).
The third task consisted of inspection of painted wooden boards weighing 3.9 kg. First, the wooden boards are dragged from a lifting table (positioned at the right side of the employee) to an inspection table (in the center). While executing this step it was noticeable that sometimes there were trunk flexion movements. Afterwards, the employee inspects the piece and it was noticeable that flexion and lateral inclination of the trunk occurred. Finally, they lift the inspected wooden board to another lifting table located on their left. Since the wooden board was already inspected, they did this movement more carefully. Due to this, a greater trunk flexion was observed (Fig. 1c).
2.2 Data Acquisition
The psychophysical test was planned to occur during three consecutive weeks for each task, increasing the time of utilization each day. On the first day, the participants only use the exoskeleton for 0.5 h. On the last day, the participants use the exoskeleton during the entire work period (8 h). We ask the participants to answer a questionnaire regarding their experience with the utilization of the back-support exoskeleton Laevo® over the three weeks. The intention was to assess their perception of range of motion, reduction of backloading, interference with the task, overall physical effort, and discomfort. This questionnaire included Borg CR-10 Scale [9], Likert Scale [10] and a body map [11] with a Visual-Analog Scale [12]. These scales range from 1 and 5 or 1 and 10, depending on the type of used for each of the questions. Due to the discomfort felt by the users during the use of the exoskeleton and the resistance of its use, it was decided to evaluate users’ perceptions in two moments: the shortest time and the longest time of use. In mean, the shortest time of use was 0.54 ± 0.09 h and the longest time was 1.40 ± 0.56 h.
The EMG assessment was applied only for the third task (visual inspection of wooden borders), because it presented greater postural diversity. On the other hand, it was not possible to perform EMG tests at the places where the remaining tasks were considered. In these factory places the thermal conditions were very hot, which increased the skin’s sweat, compromising the electrodes fixation. The sampling period was 20 min, for two conditions: with and without Laevo®. The adoption of this data acquisition time period is justified by the study of Carnide et al. (2012), where it is shown that a minimum acquisition of 20 min is sufficient to reliably estimate the “Amplitude Probability Distribution Function” (APDF). The APDF is validated to assess the muscle load of a particular task [13]. In order to achieve a balanced design, we randomly started in a with or without Laevo® condition.
EMG data were recorded using a wireless 8-channel biosignals Plux HUB® (biosignalsPlux, Lisbon, Portugal) with a sampling frequency of 1000 Hz, 100 GΩ input impedance, 110 dB common rejection factor and 16-bit analog collection channels. We collected data at six muscles on low back and upper back: left and right Trapezius pars Ascendens (TA), Erector Spinae Longissimus (ESL), Erector Spinae Illiocostalis (ESI). Bipolar Ag/AgCl surface electrodes were positioned according to Surface Electromyography for the Non-Invasive Assessment of Muscles (SENIAM) recommendations with an inter-electrode distance of 20 mm [14]. A reference electrode was placed on the C7 spinous process. Before the electrodes fixation, the skin was shaved, scrubbed and cleaned with alcohol.
In order to normalize the EMG data, the Maximum Voluntary Contraction (MVC) was collected, for each participant at the beginning of the test. For the lower back muscles, we asked the participants to do back extension and a lateral inclination (right and left) during 5 s [15]. For the upper back muscles, participants were asked to raise their arms also for 5 s [16].
2.3 Data Analysis
Statistical analysis was performed using IBM® SPSS® Statistics 25.0 software. Psychophysical data analysis was performed according to an exploratory descriptive analysis. For each variable (scores attributed by participants after each time of use) the median was considered as a measure of central tendency.
The EMG data were processed through the OpenSignals (r)evolution® 2017 software application. This computer application has a “muscle load” add-on. It allows to assess the muscle load while performing a given task, providing information on whether the muscle is tired or fatigued, thus allowing to assess whether a worker is working in safe or risky conditions. This application uses the MVC in order to calculate the APDF. Thus, the amplitude of the EMG signal, as well as the probability distribution, are related to the MVC, which allows comparing several muscles or between several tasks and also to estimate mean values of tasks in function of APDF. For both conditions, data were quantified based on mean percentile activation amplitudes obtained from APDF [17].
Relatively to the EMG data, the normality was verified by the Kolmogorov-Smirnov test. Finally, the difference of the mean values of the muscle activation amplitudes between the two conditions tested (with and without LAEVO®), for each of the muscle, was verified by the t-student test for two paired samples.
3 Results and Discussion
3.1 Psychophysical Assessment
As mentioned before, we compare the perception of the participants regarding their experience with the utilization of the back-support exoskeleton Laevo® in the shortest time (0.54 ± 0.09 h) and with the longest time (1.40 ± 0.56 h) of use.
The workers’ perceptions about the exoskeleton interference on the range of motion, reduction of backloading, task performance and physical effort are summarized in Table 1.
The participants’ perception of the range of motions shows that they consider that the use of the Laevo® exoskeleton limits their movements. Although with increasing time fuse the assigned minimum value decreases from 3 to 1, evidencing that overtime at least one participant disagrees with the lack of freedom of movements. These results do not agree with the study of Näf et al. [1]. On a scale from 0 (“not restricted”) to 10 (“very restricted”), the participants in this study gave a score of 1.4 for this parameter. The difference can be explained by the fact that exoskeleton used in Näf et al. [1] has flexible beans that track users’ movements. This evidence shows that Laevo® manufacturers’ need to improve the range of motions of their equipment.
In terms of reduction of backloading, overtime it seems that the participants’ perception of this parameter is more positive. This result supports the effectiveness of Laevo® in reducing back loading.
The results concerning interference with the task performance show no change with increase usage time. The participants consider that the exoskeleton interferes with the task. This result is not in accordance with the results reported by Näf et al. [1] and Graham et al. [2]. This can be explained by the fact that the tasks tested in the mentioned studies are very simple compared to the tasks tested in this study.
Regarding the overall effort of the tasks, we cannot find differences in the rating attributed to the different time usage scenarios. But we found differences between the participants’ overall effort perception for using or not using the exoskeleton. The global median score, in a scale from 0 (“no effort”) to 10 (“maximum effort”) for without exoskeleton was 3 (min.: 3; max.: 4) and 5 (min.: 2; max.: 6) for with the exoskeleton. This may be explained by the fact that the exoskeleton interferes with the task performance, which may require a greater effort to accomplish the task, for example walking or reaching objects and machines.
Finally, concerning the discomfort, we found that the participants felt discomfort on the neck, shoulders, thoracic region, lumbar region and hips, and thighs. Overtime, the discomfort increased for shoulder, lumbar region (although the number of participants that reported discomfort had decreased with time), and hips and thighs. For the thoracic region, the discomfort decreased. These results show new evidence of perceived discomfort with the use of the Laevo® exoskeleton since in the previous study focused on the assessment of discomfort related to the Laevo® users, the findings only show discomfort on back legs and chest [5].
3.2 EMG Test
In order to compare the muscle activity of the two tested conditions, Fig. 2 summarizes the EMG results.

Mean EMG values of activation amplitude (% of MVC) for Erector Spinae Longissimus (ESL_L), right Erector Spinae Longissimus (ESL_R), left Erector Spinae Illiocostalis (ESI_L), right Erector Spinae Illiocostalis (ESI_R), left Trapezius pars Ascendens (TA_L) and right Trapezius pars Ascendens (TA_R). The red line indicate the limit value for fatigue (>14% of MCV) and the orange line indicate the limit value for tiredness (>10% of MCV). Error bars indicate standard deviation
The condition with exoskeleton produces a decrease in the EMG values, although not statistically significant. These results are well below the studies of occupational assessment of lumbar support exoskeletons [2, 5, 7, 8].
A possible explanation for the differences found in the results of this study compared to the referred studies may be related to the fact that the tasks evaluated in the referenced studies are restricted. However, the reduction in terms of musculoskeletal overload does not seem to be relevant, since there is maintenance of fatigue or tiredness in muscles studied in both conditions tested, according to the limit values (horizontal lines in Fig. 2) defined in the study of Jonsson [17]. However, the tasks tested involved some postural variability which may have influenced these results.
4 Conclusions
Actually, the topic of occupational exoskeletons has received considerable attention. However, despite their apparent promising potential, the widespread use of exoskeletons in the industrial context should be questioned. There is a need to understand the effects of the use of this equipment on workers’ health, in particular on the physiological, psychophysical and biomechanical parameters.
The psychophysical data show good results on the workers’ perceptions about back support of the exoskeleton Laevo®. However, they consider that the exoskeleton limits their range of motion, interfering with the industrial tasks performed and increases the physical effort perceived. In terms of discomfort, workers indicate discomfort in the neck, shoulders, thigh, and hip and in the thoracic region and lumbar region. The number of workers who experience discomfort in the lower back tends to decrease with increasing use time. Even so, it is recommended the redesign of contact parts of the equipment by its manufacturer, in order to reduce the discomfort perceived by users.
The EMG data generally point out that the use of the exoskeleton results in a decrease in muscle activity of 0.8–3.6% of the back muscles compared with not using the exoskeleton (despite not being statically significant). However, this reduction in terms of musculoskeletal overload does not seem to be relevant, since there is maintenance of fatigue or tiredness in muscles studied in both conditions tested. However, the tasks tested involved some postural variability which may have influenced these results.
Globally, the results showed that the use of passive exoskeletons does not significantly decrease exposure to the WMSD risk. However, results that prove the opposite were not found. In conclusion, the exoskeleton used in this study is not particularly useful for the assessed industrial tasks, since there is postural variability in short cycles. Therefore, the use of this equipment will be more suitable to industrial contexts where tasks require the maintenance and/or repetition of the sagittal trunk flexion, without performing other movements, such as rotation or lateral inclination.
This study was limited to the time that the participants used the exoskeleton and the different samples used in the two tests. Further work should include a long period of utilization of the equipment and the same samples in the two tests in order to link the results.
References
Näf, M.B., Koopman, A. S., Baltrusch, S., Rodriguez-Guerrero, C., Vanderborght, B., Lefeber, D.: Passive back support exoskeleton improves range of motion using flexible beams. Front Robot AI 1–16 (2018)
Graham, R.B., Agnew, M.J., Stevenson, J.M.: Effectiveness of an on-body lifting aid at reducing low back physical demands during an automotive assembly task: assessment of EMG response and user acceptability. Appl. Ergon. 936–942 (2009)
Roffey, D.M., Wai, E.K., Bishop, P., Kwon, B.K., Dagenais, S.: Causal assessment of workplace manual handling or assisting patients and low back pain: results of a systematic review. Spine J. 639–651 (2010)
Beeck, R., Hermans, V.: Research on Work-Related Low Back Disorders. European Agency for Safety and Health at Work Research, Luxembourg (2000)
Bosch, T., van Eck, J., Knitel, K., de Looze, M.: The effects of a passive exoskeleton on muscle activity, discomfort and endurance time in forward bending work. Appl. Ergon. 212–217 (2016)
Lee, H., Kim, W., Han, J., Han, C.: The technical trend of the exoskeleton robot system for human power assistance. Int. J. Precis. Eng. Manuf. 1491–1497 (2012)
Abdoli E.M., Agnew, M.J., Stevenson, J.M.: An on-body personal lift augmentation device (PLAD) reduces EMG amplitude of erector spinae during lifting tasks. Clin. Biomech. 456–465 (2006)
Whitfield, B.H., Costigan, P.A., Stevenson, J.M., Smallman, C.L.: Effect of an on-body ergonomic aid on oxygen consumption during a repetitive lifting task. Int. J. Ind. Ergon. 39–44 (2014)
Borg, G.: Psychophysical scaling with applications in physical work and the perception of exertion. Scandinavian J. Work Environ. Health 55–58 (1990)
Likert, R.: A technique for the measurement of attitudes. Arch. Psychol. 5–55 (1932)
Kuorinka, I., Jonsson, B., Kilbom, A., Vinterberg, H., Biering-Sørensen, F., Andersson, G., Jørgensen, K.: Standardised Nordic questionnaires for the analysis of musculoskeletal symptoms. Appl. Ergon. 233–237 (1987)
Ghaderi, F., Banakar, S., Rostami, S.: Effect of pre-cooling injection site on pain perception in pediatric dentistry: “A randomized clinical trial.”. Dent. Res. J. 790–794 (2013)
Carnide, F., Veloso, A., Lourenço, A., Fred, A., Gamboa, H.: Determination of the minimum acquisition time for obtaining muscular load profile by Apdf function. J. Biomech. (2012)
SENIAM: http://www.seniam.org/. Last accessed 15 Apr 2019
Butler, H.L., Hubley-Kozey, C.L., Kozey, J.W.: Electromyographic assessment of trunk muscle activation amplitudes during a simulated lifting task using pattern recognition techniques. J. Electromyogr. Kinesiol. 505–512 (2009)
Ekstrom, R.A., Donatelli, R.A., Soderberg, G.L.: Surface electromyographic analysis of exercises for the trapezius and serratus anterior muscles. J. Orthop. Sports Phys. Ther. 247–258 (2003)
Jonsson, B.: Measurement and evaluation of local muscular strain in the shoulder during constrained work. J. Hum. Ergol. 73–88 (1982)
Acknowledgements
This work has been also supported by FCT—Fundação para a Ciência e Tecnologia within the Project Scope: UID/CEC/00319/2019.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Cardoso, A., Colim, A., Sousa, N. (2020). The Effects of a Passive Exoskeleton on Muscle Activity and Discomfort in Industrial Tasks. In: Arezes, P., et al. Occupational and Environmental Safety and Health II. Studies in Systems, Decision and Control, vol 277. Springer, Cham. https://doi.org/10.1007/978-3-030-41486-3_26
Download citation
DOI: https://doi.org/10.1007/978-3-030-41486-3_26
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-41485-6
Online ISBN: 978-3-030-41486-3
eBook Packages: EngineeringEngineering (R0)