
Abstract
This paper presents a new maximum power point tracking (MPPT) algorithm based on the adaptive linear neuron concept. This algorithm is designed to extract the maximum power in single-stage grid-connected photovoltaic (PV) system configuration. In the considered system, a PV panel is directly connected to a grid through a three-phase pulse-width modulation inverter. The control is achieved in the synchronous dq frame, and the proposed MPPT estimates directly the optimal d-axis duty cycle component. Furthermore, in order to achieve a unity power factor operation, the q-axis reference current is set to zero. In this work, only one proportional-integral controller is used to maintain the reactive power to zero value. To verify the effectiveness of the proposed algorithm, the grid-connected system is implemented and simulated under MATLAB-Simulink software. The obtained results are compared to those achieved by the conventional perturb and observe based MPPT technique under fast and slow irradiance changes. The simulation results show that the proposed method leads to achieve incomparable performances such as unity efficiency and zero oscillations in the PV panel in both transient and steady-state operations.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Solar energy has become an attractive and competitive renewable energy source. However, the generated power from the photovoltaic (PV) panels depends on the temperature and irradiance conditions. In addition, the PV panels exhibit extremely nonlinear voltage-current characteristics which also vary with environmental conditions. Moreover, for each operating condition, there is a unique maximum power point (MPP), where the PV system generates its maximum power. So, a maximum power point tracking (MPPT) technique is required as control strategy to track the MPP in order to maximize the produced energy [1].
Various MPPT methods have been developed and published in relevant scientific literature. The most discussed MPPT methods are perturb and observe (P&O) [2], incremental conductance [3], fractional open-circuit voltage [4], and hill climbing [5]. Recently, artificial neural network (ANN)-based methods have provided an important interest and have been successfully implemented for MPPT strategies [6]. Their main advantage is the ability to learn and improve their performances throughout previous experiences. So, ANN methods feature several advantages which significantly increase the PV system efficiencies. However, attractiveness of the ANN-based methods depends on their complexity.
Grid-connected PV system is defined as electricity-generating PV power system that is connected to the power grid. Commonly, this connection is achieved using two stages of converters [7]. The first stage is a boost converter used to increase the PV output voltage and to achieve the MPPT function. The second stage is a PWM inverter used to realize the grid-connected function. On the other hand, single-stage grid-connected systems can be also used. It consists of the panel and inverter only. The two-stage grid-connected system has the advantage that it is easy to design its control scheme, but it has some drawbacks such as complex topology, lower efficiency, and higher cost [8]. On the contrary, single-stage topology provides many advantages such as simple topology, higher power efficiency, and lower cost. However, since the system contains only one stage of power conversion, all the control objectives need to be realized simultaneously, such as MPPT control, harmonics reduction, and synchronization with the power grid, so that the complexity of control scheme is much increased [7].
In this paper, ANN-based MPPT method for single-stage grid-connected PV system is developed. The proposal is based on the adaptive linear neuron (ADALINE). The use of the ADALINE is motivated by its simple structure, convergence speed, and a possible physical interpretation of its weights [9]. In addition, the ADALINE training is performed online, which eliminates the need for repetitive offline training. The three-phase single-stage grid-connected inverter is chosen to interface PV panel system with the power grid. This topology is used, especially to reduce the power loses and to simplify the system configuration. The main contributions of the proposed MPPT and the use of the single-stage inverter can be summarized as reduction of the transient and steady-state oscillations and improvement of the efficiency. In order to prove the effectiveness of the proposed MPPT method, comparative study with the P&O algorithm is performed through numerical simulations. Obtained simulation results show perfect performances of the proposal in transient and steady states.
2 Grid-Connected PV System Modeling
2.1 Description of the Controlled Grid-Connected PV System
The proposed single-stage grid-connect PV system consists of three parts: a set of PV panels, a three-phase single-stage grid-connected inverter, and the grid. The block diagram of the proposed system is depicted in Fig. 1. In the control unit, two controllers operate simultaneously; the first one is used to perform the MPPT, and the second one is used to ensure unity power factor (UPF) operation. The main contribution of this work is in the first controller where a new MPPT control strategy based on the ADALINE is proposed. The block diagram of this strategy is presented in Fig. 5.

Block diagram of the grid-connected PV system
2.2 PV Panel Model
Ten PV panels of IFRI260-60 type are connected in series and used to experiment the proposed MPPT method. The electrical specifications of a PV panel at standard test conditions (STC) are given in Table 1 [10]. Among the many available equivalent circuits for PV panel modeling, the single-diode model is adopted in this paper.
The output current (I) of the PV panel can be expressed as [11] follows:
where I pv is the PV current, I o is the PV saturation current, and a is the diode ideality factor. V t is the thermal voltage and V is the PV output voltage. R p is the equivalent parallel resistance and R s is the equivalent series resistance.
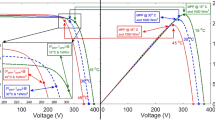
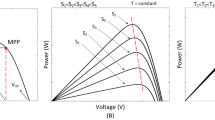
The power-versus-voltage (P-V) curves of the used ten PV panels in this work are plotted in Fig. 2.

Power-versus-voltage (P-V) curve characteristics of the ten IFRI260-60 PV panels connected in series at 25 °C for different irradiance levels (graphs plotted with step of 200 W/m2)
2.3 Grid-Connected PWM Inverter Modeling
The power circuit of the grid-connected three-phase PWM inverter is presented in Fig. 3. This inverter is connected to the grid through a three-phase AC filter containing inductances (L) and series with resistances (R). e a, e b, and e c are the grid voltages; i a, i b, and i c are the inverter output currents; v a, v b, and v c are the control voltages; V is the input DC voltage (PV panel output voltage).

Topological structure of the grid-connected three-phase PWM inverter
The PWM inverter model can be described in d-q frame as follows:
where e d, e q, i d, and i q are, respectively, the d- and q-axis components of the grid voltages and the inverter’s output currents; β d and β q are the d- and q-axis components of the modulating signals; ω is the angular frequency of the grid voltages. The DC bus voltage dynamics can be written in the following way:
The active P and reactive Q powers of the PWM inverter are finally calculated as follows:
2.4 Unity Power Factor Operation
By setting the grid voltage vector according to the d-axis (e d = E, e q = 0) and under unity power factor (UPF) operation (i q = 0), the PWM inverter model becomes the following equations:
3 ADALINE-Based MPPT
3.1 The ADALINE Theory
ADALINE is a powerful ANN technique used in many applications in power systems. It’s a multi-input single-output topology which is equivalent to one neuron. It’s composed by an input vector X(k) = [x 1(k) … x m(k)], an adjustable weight vector W(k) = [w 1(k) … w m(k)]T, a linear activation function, and an estimated output y est(k). Architecture of an ADALINE is shown in Fig. 4.

Architecture of the ADALINE
The estimated output can be calculated for any input X(k) at sample time k as follows:
ADALINE is an online learning process. Its weights are adjusted to minimize the error e(k) between the estimated output y est(k) and the desired response y d(k). The estimation error e(k) is then defined as follows:
When inputs are applied to the network, its output y est(k) is compared to a target y d(k). Based on the generated error, a learning rule is used to adjust the weights in order to move the ADALINE output closer to the target. The most known learning rule is that called α-LMS algorithm given as follows:
where μ is the learning rate. The choice of μ controls stability and speed of convergence of the ADALINE [9]. For input pattern vectors, stability is ensured for most practical purposes if it is as follows:
3.2 Proposed MPPT Method
The task of the proposed control is to extract the maximum power from the PV source by generating an appropriate reference d-axis duty cycle component β d. To set the control, we suppose that the inductor drop voltage is neglected since the sun irradiance doesn’t change rapidly. Moreover, the resistance is generally low and can be neglected. Then, Eq. (5a) is written as follows:
The MPPT methods are based on the fact that the derivative of the output power with respect to the panel voltage is equal to zero at the MPP. Therefore, the following equation leads to the MPP condition in terms of panel voltage V, i.e.:
The substitution of Eq. (11) in Eq. (10) leads to the following equation:
From Eq. (12) and in order to operate at the MPP, the d-axis duty cycle component must be tuned continuously to satisfy the following equality:
At this stage, the ADALINE strategy is introduced to solve Eq. (13) in the aim to find the optimal duty cycle. Considering the ADALINE structure defined in Sect. 3.1, the following equalities are posed:
The implementation of the proposed control is easy; y d(k) is recurrently compared to β d(k), and according the generated error e, the duty cycle β d(k + 1) is increased or decreased up to the error becomes zero. Then, by means of Eq. (8), the ADALINE-based MPPT algorithm is expressed by the following equation:
As seen, the duty cycle is iteratively adapted with constant learning rate μ. However, during the simulation tests, it’s found that the better results, at transient state, are found by using variable learning rate. Consequently, to adapt the duty cycle, tanh(x) function is used in this paper. The MPPT algorithm becomes the following equation:
with
Considering Eq. (16), the block diagram of the proposed MPPT algorithm is given by Fig. 5.

Block diagram of the proposed MPPT algorithm
4 Simulation Results
To verify the effectiveness of the proposed method, dynamic and steady-state performances are examined according to fast (±400 W/m2/s) and slow (±40 W/m2/s) sun irradiation slop change [12]. In addition, the sun irradiance G changes between low irradiance level (200 W/m2) and high irradiance level (1000 W/m2). The PWM inverter operates at UPF operation and is connected to 100 V–50 Hz line to neural three-phase grid voltages. The irradiance test sequence is illustrated in Fig. 6.

Irradiance test sequence
The overall system parameters including the used IFRI260-60 PV panels at STC are given in Table 1.
Figure 7 depicts the shape of the extracted power when the test sequence of irradiance is applied. As can be seen from Fig. 7a, the two methods are able to track the maximal power under a constant and changing irradiance conditions. However, the zoom illustrated in Fig. 7b demonstrates the superiority of the proposed method whereabouts 100% of efficiency is provided in steady state. Furthermore, the PV power doesn’t present any oscillations by means of the presented method unlike with the P&O technique where large oscillations and losses are observed. Figure 7c shows the dynamic response of the proposed MPPT compared to P&O. This test considers a variable solar irradiance profile with fast and slow rate of change. It can be seen that 100% of efficiency is still reached with the proposed technique like the steady-state operation. As for the P&O method, losses and oscillations in the PV power are observed.

PV power under constant and variable irradiance profile: (a) overall power response, (b) zoom of the power in steady state, and (c) zoom of the power in transient state
The PV current under constant and variable irradiance level is shown in Fig. 8. In Fig. 8a, it can be seen that the optimal current is clearer and more stable by using the proposed method. Indeed, in steady state, the current shape is a straight line without oscillations by means of the proposed technique (see Fig. 8b). This involves the absence of stress in the panel and certainly leads to increase the lifetime. Likewise, during transient state and referring to Fig. 8c, minor oscillations are observed in the current but remain insignificant compared to those generated by the P&O method.

PV current under constant and variable irradiance profile: (a) overall current response, (b) zoom of the current in steady state, and (c) zoom of the current in transient state
The PV panels’ voltage waveform is shown in Fig. 9. It is clear that the shape of the voltage is better by means of the proposed MPPT algorithm as shown in Fig. 9a. In steady state, the voltage is a pure line without any oscillation unlike the P&O technique where high oscillations are observed (see Fig. 9b). Therefore, this MPPT method based on the ADALINE strategy leads to increase the lifetime of the used panel. In variable atmosphere conditions, the voltage curve of the PV panel has very little oscillations compared to the conventional P&O method as displayed in the zoomed Fig. 9b.

PV panel voltage under constant and variable irradiance profile: (a) overall response of the methods, (b) zoom of the voltage in steady state, (c) zoom of the voltage in transient state
5 Conclusions
In this paper, a new MPPT method based on the ADALINE strategy is presented. This MPPT is designed to extract the maximum power from PV panel in single-stage grid-connected system. The use of the proposed method reduces considerably the system complexity since the d-axis duty cycle reference is directly fed from the MPPT to the active power control. Numerical simulations have been carried out under variable atmospheric conditions. The obtained results are compared to those achieved by the conventional P&O algorithm. Supreme and incomparable results are found with the proposed method such as unity efficiency in transient and steady-state operations. Furthermore, the oscillations in the PV panels’ voltage and current are fully removed and lead to stress less of the PV panel. Finally, this method solves the drawbacks of the conventional methods such as the trade-off between speed convergence and oscillations in steady state and masterfully improves the poor efficiency in variable conditions, especially in low irradiance level.
References
E.I. Batzelis, Simple PV performance equations theoretically well founded on the single-diode model. IEEE J. Photovolt. 7(5), 1400–1409 (2017)
V.R. Kota, M.N. Bhukya, A novel linear tangents based P&O scheme for MPPT of a PV system. Renew. Sustain. Energy Rev. 71(Suppl C), 257–267 (2017)
M.A. Elgendy, D.J. Atkinson, B. Zahawi, Experimental investigation of the incremental conductance maximum power point tracking algorithm at high perturbation rates. IET Renew. Power. Gener. 10(2), 133–139 (2016)
A. Thangavelu, S. Vairakannu, D. Parvathyshankar, Linear open circuit voltage-variable step size-incremental conductance strategy based hybrid MPPT controller for remote power applications. IET Power Electron. 10(11), 1363–1376 (2017)
N. Kumar, I. Hussain, B. Singh, B.K. Panigrahi, Framework of maximum power extraction from solar PV panel using self-predictive perturb and observe algorithm. IEEE Trans. Sustain. Energy. 9(2), 895–903 (2018)
S. Messalti, A. Harrag, A. Loukriz, A new variable step size neural networks MPPT controller: review, simulation and hardware implementation. Renew. Sustain. Energy Rev. 68(Part 1), 221–233 (2017)
Y. Singh, I. Hussain, B. Singh, S. Mishra, Grid integration of single-phase single-stage SPV system using an Active Noise Isolation based control algorithm, in IEEE Int. Conf. on Power. Electron., Drives and Energy Systems (PEDES), Trivandrum, (IEEE, Piscataway, NJ, 2016), pp. 1–5
C. Jain, B. Singh, Single-phase single-stage multifunctional grid interfaced solar photo-voltaic system under abnormal grid conditions. IET Gener. Transm. Dis. 9(10), 886–894 (2015)
B. Widrow, M.A. Lehr, 30 years of adaptive neural networks: perceptron, madaline, and backpropagation. Proc. IEEE 78(9), 1415–1442 (1990)
IFRI260-60 PV Module Datasheet. Available at: http://www.ifrisol.com
M.G. Villalva, J.R. Gazoli, E.R. Filho, Comprehensive approach to modeling and simulation of photovoltaic arrays. IEEE Trans. Power Electron. 24(5), 1198–1208 (2009)
R. Bründlinger, N. Henze, H. Häberlin, B. Burger, A. Bergmann, F. Baumgartner, prEN 50530–the new European standard for performance characterisation of PV inverters, in 24th EU PV Conf., Hamburg, Germany, (WIP-Renewable Energies, Munich, 2009)
Acknowledgments
This work was supported by the Franco-Algerian cooperation program PHC-TASSILI (Project No. 17MDU995).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Triki, Y., Bechouche, A., Seddiki, H., Ould Abdeslam, D. (2020). Unity Efficiency and Low-Cost MPPT Method for Single-Stage Grid-Connected PV System. In: Zamboni, W., Petrone, G. (eds) ELECTRIMACS 2019. Lecture Notes in Electrical Engineering, vol 615. Springer, Cham. https://doi.org/10.1007/978-3-030-37161-6_41
Download citation
DOI: https://doi.org/10.1007/978-3-030-37161-6_41
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-37160-9
Online ISBN: 978-3-030-37161-6
eBook Packages: EngineeringEngineering (R0)