
Abstract
Convenient and high-efficiency manipulation of nanoscale materials has huge potential applications in nano assembly and biomedical technology. We have reported an ultrasonic needle-droplet-substrate system to aggregate and then transport the nanoscale materials freely at the interface between the substrate and water droplet. In the manipulation method, the ultrasonic needle is inserted into the water droplet of nanoscale material to generate a controlled ultrasonic field for the manipulations. In this paper, we report the detailed method and results of FE (finite element) analyses for the investigation of working principle of the manipulation system. The FE analyses show that the ultrasonic needle can generate an acoustic streaming field around the ultrasonic needle to implement the nano aggregation and transportation. The computational results can well explain the experimental phenomena of multiple-function manipulation.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
Manipulation of nanoscale materials has huge potential applications in the fabrication of nano-sensing materials and nano-electrode, nano decoration, micro/nano assembly [1,2,3], etc. Several existing methods for the manipulation of micro/nanoscale materials have been reported. They include the magnetic method [4, 5], dielectrophoresis method [6, 7], optical method [8, 9], and acoustic method [10, 11]. Compared to other methods, the acoustic method has the following merits. It is not selective to the material properties of manipulated samples, and has little thermal damage to the manipulated samples (in some methods). Its devices can be very simple and compact. Therefore, the acoustic method is very competitive in nanoscale material manipulations.
In order to implement the aggregation and transportation of nanoscale materials at a droplet-substrate interface by the same ultrasonic device, an ultrasonic needle-droplet-substrate system, which can aggregate and then transport the nanoscale materials freely at the interface between the substrate and water droplet, was proposed [12, 13]. In the manipulation method, the ultrasonic needle is inserted into the water droplet of nanoscale material to generate a controlled ultrasonic field for the manipulations. This new strategy for multiple-function manipulation of nanoscale materials, combined with other technologies, has potential applications in nano assembly, biomedical technology and so on.
In this paper, we report the detailed method and results of FE (finite element) analyses for the investigation of working principle of the manipulation system. The FE analyses show that the ultrasonic needle can generate an acoustic streaming field around the ultrasonic needle to implement the nano aggregation and transportation. The computational results can well explain the experimental phenomena of multiple-function manipulation. The FE analyses method also provides an effective way to design and optimize the multiple-function manipulation system.
2 Experimental Setup and Manipulation Functions
Figure 1 shows the experimental setup of the ultrasonic needle-droplet-substrate system for multiple-function manipulation nanoparticles. The experimental setup consists of three main components: ultrasonic needle, vibration transmission rod (VTR) and piezoelectric plate. The ultrasonic needle made of fiberglass is bonded onto the tip of the VTR by the 502 glue, the VTR made of stainless steel is bonded onto the edge of the long side of the piezoelectric plate by epoxy resin adhesive, and the VTR’s end is fixed with a special fixture. The VTR has a uniform diameter of 1 mm, and is 26 mm long out of the piezoelectric plate. The ultrasonic needle and the piezoelectric plate are in the same plane, the ultrasonic needle has a uniform radius of 10 μm, and is 3 mm long, the angle between the VTR and the ultrasonic needle is about 90°. The length, width and the thickness of the piezoelectric plate are 20 mm, 10 mm and 0.78 mm, respectively. The piezoelectric constant d33, electromechanical coupling factor k33, mechanical quality factor Qm, dielectric dissipation factor tanδ, and density are 200 × 10−12 C/N, 0.60, 800, 0.5%, 7450 kg/m3, respectively. The piezoelectric plate is used to generate the vibration, which passes through the VTR to excite the ultrasonic needle. The droplet is formed by DI water and ultrasonically dispersed nanoscale samples, and the ultrasonic needle can be positioned by the xyz platform. In the experiments, Si nanoparticles with a diameter of 500 nm was used as the manipulated sample, and the ultrasonic needle, inserted into the water droplet, was perpendicular to the substrate made of silicon. In the manipulation, the ultrasonic needle was moved to the adjacent of the droplet-substrate interface, on which there were nanoscale samples, to carry out the manipulation.

Schematic diagram of the ultrasonic needle-droplet-substrate system for the multiple-function manipulation.
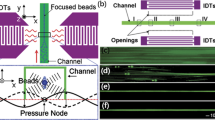
Images a–d in Fig. 2 show a multiple-function manipulation process for the Si NPs on the silicon substrate surface. In the experiments, the operating frequency and voltage are 75.5 kHz and 25 Vp-p, respectively. In image a, the Si NPs are uniformly dispersed in the water droplet. The micro-size nano spot in image b is formed by 120 s sonication. From image b to d, the aggregated micro-size nano spot is transported freely at the interface between the silicon substrate and water droplet.

Aggregation and transportation of the micro-size nano spot at the interface between the silicon substrate and water droplet.
In the experiments, the orthogonal vibration velocities at the ultrasonic needle’s root Vx, Vy and Vz were 5.2 ∠ −13.8° mm/s, 61.6 ∠ −12.5° mm/s and 2.2 ∠ 172.5° mm/s, respectively. As the magnitude of the y-directional vibration velocity was much larger than that of the x- and z-directional vibration velocities, vibration trajectory at the ultrasonic needle’s root was approximately linear.
3 FE Computational Model and Method
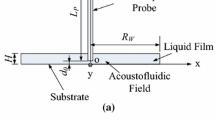
In order to investigate the manipulation mechanism, ultrasonic vibration and the acoustic streaming of the ultrasonic needle-droplet-substrate system were computed and analyzed by the finite element method (FEM). A mathematical-physical model and meshed FEM model used in the computation are shown in Fig. 3. The boundary conditions of the acoustofluidic field in the ultrasonic needle-droplet-substrate system are shown in Fig. 4. The computation was accomplished by software COMSOL Multiphysics. The spatial gradients of the Reynolds stress and mean 2nd pressure are the driving force of the acoustic streaming. Detailed method for the acoustic streaming computation as follows [14,15,16].

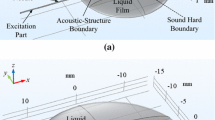
(a) Math-physical model for the ultrasonic needle-droplet-substrate system. (b) Meshed model for the ultrasonic needle-droplet-substrate system.

Boundary conditions for the acoustofluidic field of the ultrasonic needle-droplet-substrate system.
where ui and uj are the vibration velocities of the sound field, ρ0 is the fluid density without sound field, c0 is the sound speed, p is the sound pressure (the first order), \( \frac{B}{A} \) is the nonlinear parameter of the acoustic medium, Fj is the spatial gradient of the Reynolds stress, \( \overline{{p_{2} }} \) is the mean 2nd pressure, η is the shear viscosity coefficient of the acoustic medium, and < > represents the time average over one time period.
4 Results and Discussion
The parameters of the ultrasonic devices and experimental system, used in the FEM computation, are listed in Table 1. The computed acoustic streaming on the substrate surface is shown in Fig. 5. It can be seen that the acoustic streaming on the substrate surface flows inward from the all-around, and the NPs are flushed to the location under the ultrasonic needle’s tip. This explains the formation of the micro-size nano spot with a round shape shown in Fig. 2. The location of the acoustic streaming field is determined by the ultrasonic needle. Thus, the acoustic streaming can be shifted by moving the ultrasonic needle, which can be implemented by moving the ultrasonic device. Thus the micro-size nano spot can be transported freely at the droplet-substrate interface.

(a) Schematic diagram of the acoustic streaming on the substrate surface. (b) Computational acoustic streaming on the substrate surface.
In the above computation, the ultrasonic needle vibrates in the direction parallel to the substrate. Our computation shows that if the vibration of ultrasonic needle is not parallel to the substrate, the desired acoustic streaming field shown in Fig. 5 cannot be generated, which means that the aggregation and transportation functions cannot be realized by the device.
5 Summary
With the FEM computation, we have analyzed the aggregation and transportation mechanism in the ultrasonic needle-droplet-substrate system proposed by our group. The computation indicates that the acoustic streaming, which is generated by the linear vibration of the ultrasonic needle parallel to the substrate, can result in the multiple-function manipulation. The FE analyses method also provides an effective way to design and optimize the multiple-function manipulation system.
References
Dash, S.P., Patnaik, S.K., Tripathy, S.K.: Investigation of a low cost tapered plastic fiber optic biosensor based on manipulation of colloidal gold nanoparticles. Opt. Commun. 437, 388–391 (2019)
Rajput, N.S., Le Marrec, F., El Marssi, M., Jouiad, M.: Fabrication and manipulation of nanopillars using electron induced excitation. J. Appl. Phys. 124(7), 074301 (2019)
Zhang, B., Meng, F.S., Feng, J.G., Wang, J.X., Wu, Y.C., Jiang, L.: Manipulation of colloidal particles in three dimensions via microfluid engineering. Adv. Mater. 30(22), 1707291 (2018)
Agiotis, L., Theodorakos, I., Samothrakitis, S., Papazoglou, S., Zergioti, I., Raptis, Y.S.: Magnetic manipulation of superparamagnetic nanoparticles in a microfluidic system for drug delivery applictions. J. Magn. Magn. Mater. 401, 956–964 (2016)
Huang, C.Y., et al.: Magnetic micro/nano structures for biological manipulaition. Spin 6(1), 1650005 (2016)
Han, S.I., Kim, H.S., Han, A.: In-droplet cell concentration using deelectrophoresis. Biosens. Bioelectron. 97, 41–45 (2017)
Liu, L.B., Chen, K., Xiang, N., Ni, Z.H.: Dielectrophoretic manipulation of nanomaterials: a review. Electrophoresis 40(6), 873–889 (2019)
Grier, D.G.: A revolution in optical manipulation. Nature 424(6950), 810–816 (2003)
Kumar, S., Wittenberg, N.J., Oh, S.H.: Nanopore-induced spontaneous concentration for optofluidic sensing and particle assembly. Anal. Chem. 85(2), 971–977 (2013)
Mao, Z.M., et al.: Enriching nanoparticles via acoustofluidics. ACS Nano 11(1), 603–612 (2017)
Li, N., Hu, J.H., Li, H.Q., Bhuyan, S., Zhou, Y.J.: Mobile acoustic streaming based trapping and 3-dimensional transfer of a single nanowire. Appl. Phys. Lett. 101(9), 093113 (2012)
Hu, J.H.: Ultrasonic Micro/Nano Manipulations: Principles and Examples. World Scientific, Singapore (2014)
Zhou, Y.J., Hu, J.H., Bhuyan, S.: Manipulations of silver nanowires in a droplet on a low-frequency ultrasonic stage. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 60(3), 622–629 (2013)
Tang, Q., Hu, J.H.: Analyses of acoustic streaming field in the probe-liquid-substrate system for nanotrapping. Microfluid. Nanofluid. 19(6), 195–1408 (2015)
Tang, Q., Hu, J.H.: Diversity of acoustic streaming in a rectangular acoustofluidic field. Ultrasonics 58, 27–34 (2015)
Lighthill, J.: Acoustic streaming. J. Sound Vib. 61(3), 391–418 (1978)
Acknowledgements
This work is supported by the following funding organization in China: the National Basic Research Program of China (973 Program, Grant No. 2015CB057501), State Key Lab of Mechanics and Control of Mechanical Structures (Grant No. MCMS-0318K01), and Higher Education Promotion Project of Anhui (Grant No. TSKJ2016B20).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Qi, X., Tang, Q., Liu, P., Hu, J. (2019). Finite Element Analyses of Working Principle of the Ultrasonic Needle-Droplet-Substrate System for Multiple-Function Manipulation. In: Yu, H., Liu, J., Liu, L., Ju, Z., Liu, Y., Zhou, D. (eds) Intelligent Robotics and Applications. ICIRA 2019. Lecture Notes in Computer Science(), vol 11741. Springer, Cham. https://doi.org/10.1007/978-3-030-27532-7_20
Download citation
DOI: https://doi.org/10.1007/978-3-030-27532-7_20
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-27531-0
Online ISBN: 978-3-030-27532-7
eBook Packages: Computer ScienceComputer Science (R0)