
Abstract
Electric vehicles are considered as the cars of the future, given the advantages they offer compared to conventional cars, which are equipped with a combustion engine: economy of use, reliability, silence of operation, overall environmental impact, promotes the development of renewable energies and the stability of networks. However, they still have critical problems to solve as high cost, low autonomy and long charging time. The majority of these problems are totally related to the battery package. Thus, the battery package must contain enough energy to have sufficient power capacity for the accelerations and decelerations tests. Also, to have a certain driving autonomy. So, in this study, a mechatronic power system model of an electric vehicle is proposed. It is adapted to estimate the amount of energy needed to travel a certain distance. The modeling and simulation of the system were performed using the object-oriented language Modelica. While, the parametric studies for estimating energy consumption were carried using Model Center software. The developed model ensures that the performances related to the acceleration test and driving distance are respected.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The electric car remains a mobility solution of the future. It is still evolving and getting closer step by step in performance terms of the thermal car [10]. However, it still has critical problems to solve. In regards to the economic field, the biggest problem is related to the battery. Its cost is high and its maintenance is expensive [2].
Furthermore, the electric car also has difficulties at the recycling level. It is much more complex and less competitive compared to the thermal car. Indeed, it requires special treatment of batteries. The latter is so expensive for the user that it is generally supported in the manufacturer’s warranty.
Moreover, the electric car is not 100% ecological taken into account the production of electricity necessary for its operation. The electricity used to recharge the battery must be produced by truly renewable energies, such as solar or hydraulic energy.
In terms of autonomy, the majority of available vehicles have autonomy in the order of 100–150 km [2]. This autonomy is largely sufficient for an urban user. However, it is mediocre for a user making only long distances.
In conclusion, we can say that in the case of an electric production made from renewable energies, the electric vehicle seems more beneficial for the environment than the thermal car. In fact, it can significantly reduce gas emissions and air pollution, especially in urban environment where its implementation will be privileged.
The preliminary design of electric cars can be achieved using different multi-domain modeling tools such as Matlab/Simulink [4, 5] and VHDL-AMS [11].
Several studies have been developed in the literature to improve and optimize the performances of electric cars in order to obtain a more efficient and more reliable system. For instance, Schaltz concentrated his work on the design and modeling of a battery package [12]. This package must contain enough power to have a certain driving autonomy. Guizani et al. developed, in the preliminary design phase, a simple model of the electric vehicle [6]; in order to optimize the propulsion system characteristics while respecting the performance requirements related to the different test cases: the maximum speed and the acceleration test.
The focus in this paper will be on the design and modeling of a mechatronic power system of an electric vehicle to estimate the necessary amount of energy power to travel a certain distance.
This paper is structured as follows: after the introduction, Sect. 2 describes the mathematical model used in this study. Section 3 gives the implementation of the presented model in Modelica/Dymola. Section 4 gives the simulation results in order to verify the developed model, Sect. 5 provides parametric studies to estimate the energy consumption of the electric vehicle during an imposed profile and Sect. 6 presents the conclusion remarks.
2 Description of the Mathematical Model
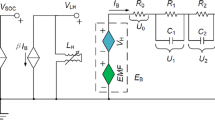
The battery is the energy source of the vehicle. It consists of the series and/or parallel association of elementary cells. The equivalent diagram of the battery is shown in Fig. 1.

Equivalent circuit diagram of the battery
The total voltage, the current and the mass of the battery can be calculated by the following expressions [8]:
where:
-
Ns [−]: the number of cells in series,
-
Np [−]: the number of cells in parallel,
-
Vcel [V]: the voltage of a cell,
-
icel [A]: the current in a cell,
-
Mcel [Kg]: the mass of a cell,
-
Vbat [V]: the voltage of the battery,
-
ibat [A]: the current in of the battery,
-
Mbat [Kg]: the mass of the battery.
In order to evaluate the behavior of the battery, it is necessary to determine the variation of its state of charge SoC. The SoC corresponds to the amount of charge C that can be restored by the battery with respect to its nominal capacity C0 and corresponding to SoC = 100% [7]:
C and C0 are expressed in A.h.
After the mathematical development of the battery, the model is modeled using the object-oriented language Modelica [3], as indicated in the following section.
3 Modeling of the Battery with Modelica
The objective of this study is to develop a Modelica model of the battery able to simulate its real behavior taking into account the consequent decrease of its SoC.
There are many technologies of battery. If their operation is similar, the materials used react differently and therefore have different performance. The main Battery Pack’s technologies most used by the automotive industry are three: lead-acid batteries, nickel batteries and lithium batteries.
In this article, the battery package is based on a type AMP 20 Lithium Ion CellFootnote 1 because of the advantages that confers compared to other technologies:
-
Higher energy density than others,
-
A recharge time less important,
-
Low risk of pollution.
The external view of the battery model is shown in Fig. 2.

External view of the battery model developed with Modelica
Going deep into the internal architecture of the model as shown in Fig. 3, the electrical behavior of the battery is described only by blocks chosen from the Modelica library. Before describing the role of each block, it is important to specify that this model operate in cycle. It generate a voltage source between the two ports pin_p and pin_n of the battery.

Internal view of the battery model developed with Modelica
The current IBat generated by the voltage UBat and measured by the current Sensor is compared with the permissible current Imax. The minimum current obtained is divided by the gain1, which represents the number of cells in parallel Np, in order to obtain the current circulating in each cell i. This current flows thereafter in the SoC block.
The other input of this block is the capacity of the battery C0 connected to the gain2. It perform a unit conversion from A.s to A.h. This block calculates the instantaneous value of the state of charge of a cell by Eq. (2). The calculated value is an input of a VCel-SoC table, which provides the voltage of a cell according to the state of charge. The voltage value obtained at the output of the component VCel-SoC is multiplied by the gain3, which represents the number of cells in series Ns, is used as a reference to generate the battery voltage. To evaluate the behavior of different battery technologies, the designer can modify the VCel_SoC table at the output of the SoC block.
4 Simulation Results
In this part, the analysis model used to perform parametric studies in the following part is made up of the battery in series with equivalent resistance that represents the rest of the electric vehicle model. The Modelica model of the equivalent resistance was developed in [9].
The simulation results of the vehicle according to the New European Driving Cycle NEDC [1], are given by Figs. 4 and 5. The NEDC cycle is used to simulate and verify the model of the battery developed in the previous part.

Comparison between the measured speed of the vehicle and the imposed cycle NEDC

Variation of the state of charge of the battery during the NEDC profile
Figure 4 shows a comparison between the real speed of the vehicle measured at the output of the model and the NEDC cycle imposed on the input. The obtained result confirms that the measured speed follows the profile of the imposed road.
Figure 5 represent the variation of the state of charge along the imposed profile. The final state of charge of the battery is about 67%, which means that the proposed model has lost 16% of its capacity. With the same values of Ns and Np and a minimum state of charge equal to 20%, the model can repeat 4.5 times the imposed cycle.
5 Parametric Study of the Energy Consumption of the Battery with ModelCenter
The objective of this part is to estimate the amount energy of the battery needed to travel a certain distance. Therefore, the following requirements are taken into account:
-
The imposed speed on the input is a constant.
-
The road is horizontal, the grade angle α is equal zero.
-
The wind speed is zero.
-
The battery fully charged.
The model developed in the previous section was used to calculate the value of the energy required by the battery for each kilometer traveled by the vehicle. The only difference, is that the NEDC cycle is replaced by a constant speed. It is the reference speed that the vehicle must reach. In addition, other parameters are added within the model, as shown in Fig. 6. These parameters are defined by the following equations [8]:

Modelica code for estimating the energy required by the battery
-
Energy, is the total energy consumed by the vehicle during the imposed cycle;
$$ Energy = \frac{1}{3600}\int {(powerSensor.Power)dt} $$(3) -
RangeKm, it is the distance traveled by the vehicle in kilometers;
$$ Range_{km} = \frac{1}{1000}\int {(speedSensor.speed)dt} $$(4) -
EnergyKm, it is the energy required by the vehicle to travel one kilometer with a constant speed;
$$ Energy_{km} = \frac{Energy}{{Range_{km} }} $$(5)
Figure 7 shows the results of a parametric study performed with ModelCenterFootnote 2 to determine the EnergyKm function. In this study, the input variables are the total number of cells, the reference speed to be achieved and the output parameter (response) is the EnergyKm function.

Graphic interface of the parametric study with ModelCenter
Parametric study operates in iterative loop. By setting each time the number of cells, EnergyKm is calculated by changing the reference velocity between a minimum value startingvalue and a maximum value endingvalue, as shown in Fig. 8.

Parametric study performed inside Model Center to estimate the energy consumption
From the results shown in Fig. 8, it is possible to plot the curves in Fig. 9, which show the variation of EnergyKm as a function of the speed to be achieved for a certain number of cells.

Variation of energy according to the target speed and the number of cells
These graphs can be used as a reference by the designer to calculate the total energy required by an electric vehicle by fixing certain requirements such as:
-
The distance to cover,
-
The speed of the vehicle,
-
The number of cells.
Example
Requirements:
-
The distance to be covered = 100 km,
-
The speed = 100 km/h,
-
The number of cells = 300.
The designer must select on the x axis the required speed which is equal to 100 km/h, after that, using the curve of 300 cells, he must read on the y axis the necessary value of EnergyKm. If the distance to be traveled is equal to 100 km, considering a cycle of discharge of the battery. Then, total energy TotalEnergy is given by the following relation [8]:
Where k is a factor that takes into consideration that the battery needs to be recharged when its SoC is below a minimum value (typically SoCmin = 20%).
6 Conclusion
Our main contribution in this paper was a proposition of a mechatronic power system able to simulate the dynamic behavior of the battery taking into account the consequent decrease of its state of charge.
The presented system has been used to perform parametric studies using ModelCenter software to estimate the amount of energy required to travel a certain distance.
According to the obtained results, the efficiency of the proposed model was tested and confirmed. Futures works will be focus on the optimization of different design variables in order to get a more reliable car that can properly fulfill its mission.
Notes
- 1.
- 2.
Phoenix Integration. PHX ModelCenter, from http://www.phoenix-int.com/software/phx-modelcenter.php.
References
Barlow TJ, Latham S, McCrae I, Boulter P (2009) A reference book of driving cycles for use in the measurement of road vehicle emissions
Chan C, Chau K (2001) Modern electric vehicle technology. Oxford University Press, p 47
Fritzson P (2010) Principles of object-oriented modelling and simulation with Modelica 2.1, Wiley https://doi.org/10.1002/9780470545669
Gao DW, Mi C, Emadi A (2007) Modeling and simulation of electric and hybrid vehicles. Proc IEEE 95:729–745. https://doi.org/10.1109/JPROC.2006.890127
Guizani A, Hammadi M, Choley JY, Soriano T, Abbes MS, Haddar M (2014a) Multidisciplinary optimization of mechatronic systems: application to an electric vehicle Mechatronic systems: theory and applications, Springer, pp 1–14. https://doi.org/10.1007/978-3-319-07170-1_1
Guizani A, Hammadi M, Choley JY, Soriano T, Abbes MS, Haddar M (2014b) Multidisciplinary approach for optimizing mechatronic systems: application to the optimal design of an electric vehicle. In: International conference on advanced intelligent Mechatronics (AIM), IEEE/ASME, pp 56–61. https://doi.org/10.1109/AIM.2014.6878046
Guizani A, Hammadi M, Choley JY, Soriano T, Abbes MS, Haddar M (2016) Electric vehicle design, modelling and optimization. Mech Ind EDP Sci 17:405. https://doi.org/10.1051/meca/2015095
Guizani A (2016) Approche multi-agents pour la conception optimale des systèmes mécatroniques, Université Paris-Saclay, Université Paris-Saclay
Guizani A, Hammadi M, Choley JY, Soriano T, Abbes MS, Haddar M (2017) Multi-agent approach based on a design process for the optimization of mechatronic systems. Mech Ind EDP Sci 18:507. https://doi.org/10.1051/meca/2016080
Hori Y (2004) Future vehicle driven by electricity and control research on four-wheel-motored” UOT Electric March II” IEEE Transactions on Industrial Electronics. IEEE 51:954–962. https://doi.org/10.1109/TIE.2004.834944
Jaber K, Fakhfakh A, Neji R (2011) Modeling and simulation of high performance electrical vehicle powertrains. In: VHDL-AMS, electric vehicles modeling and simulations, p 25. https://doi.org/10.5772/16650
Schaltz E (2011) Electrical vehicle design and modeling. Intech Open Access Publisher. https://doi.org/10.5772/20271
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Guizani, A., Trabelsi, H., Hammadi, M., Choley, J.Y., Barkallah, M., Haddar, M. (2020). Design and Modeling of a Mechatronic Power System of an Electric Vehicle. In: Aifaoui, N., et al. Design and Modeling of Mechanical Systems - IV. CMSM 2019. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-030-27146-6_92
Download citation
DOI: https://doi.org/10.1007/978-3-030-27146-6_92
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-27145-9
Online ISBN: 978-3-030-27146-6
eBook Packages: EngineeringEngineering (R0)