
Abstract
Incremental sheet metal forming process is a new procedure that forms three-dimensional parts of metal in a thin sheet. In particular, single point incremental forming of sheet metal is considered as a process that forms products without using complex dies and specific forming tool. Through this process, a cylindrical rotating punch with hemispherical end shape follows a predefined continuous or discontinuous trajectory to deform the sheet plastically. This fabrication method is known for its flexibility and the adaptation to complex geometrical shapes [6]. In the present work, the single point incremental forming process (SPIF) has been investigated experimentally and numerically using 3D finite element analysis (FEA). Regarding concerns of the material, the sheets were produced from aluminum alloy. This study focuses on using numerical simulations as a tool to predict and control some mechanical and geometrical responses. In order to understand the effect choice of model constitutive laws, we intend to compare between two relationships of stress-strain hardening behavior, implemented on ABAQUS software, with the experimental results. Based on the obtained findings, a comparison study was presented in this paper between experimental and numerical results. Different outputs responses were extracted such as global geometry (springback error, shape and final achieved section profiles) and thickness distribution. Therefore, the results obtained from the simulation were validated experimentally and good correlations are found, also the process strategies show good agreement with the experiments. Simultaneously, we conclude the most efficient hardening behavior of the material that insures the obtaining of results that are as close as possible to the experimental ones.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Single point incremental forming (SPIF)
- Aluminum alloy
- Finite element analysis (FEA)
- Modeling of hardening behavior
- Springback
- Final thickness distribution
1 Introduction
Incremental sheet forming (ISF) is a new forming method. It is a process in which a hemisphere-shaped tool is used to shape the sheet into the wanted form. The tool travels over the material causing the sheet to deform plastically, to accomplish the desired shape body [3]. This method is cheap and less expensive when compared with other processes, which require a customized punch for every needed form [4, 5]. The single point incremental sheet forming (SPIF) is the most used type of this procedure, due to its flexibility. However, this method is notorious for the springback phenomenon. This disadvantage occurs due to the accumulation of residual stress during the forming process. After removing the tool and the blank holder, the sheet will go through a relaxation stage, hence, the springback phenomena. The aim of our work is top study the effect of the hardening law models (Swift and Voce) and the resolution methods (explicit and implicit) on different outputs such as final shape, sheet thickness variation and springback.
2 Modeling and Simulation
The geometry considered in this study was a truncated cone, with 60° wall inclination angle, an upper diameter of 160 mm and a depth of 30 mm as shown in Fig. 1. A punch tool with a hemispherical head, with a diameter of 10 mm is used. The desired geometry was first prepared using a commercial 3D CAD-CAM software CATIAV5R21. A discontinuous toolpath with a vertical increment step size of 1 mm was generated. The obtained punch trajectory was converted into a numerical file by using a specific postprocessor and then the different coordinates were implemented in ABAQUS according to a global coordinate system.

3D CAD geometry of the formed part by SPIF process
The finite element simulation was carried out using ABAQUS® software. The sheet was modeled as a deformable shell body with 0.6 mm of thickness, it was meshed into S4R shell elements with 5 integration points through the thickness. The tool is considered as a rigid body. The interaction between the two body (punch/sheet) is a surface to surface contact with hard contact and a coulomb’s friction value of 0.1.
The material studied in this paper is an aluminum alloy AA1050. The mechanical properties of the mentioned material are shown in Table 1 (Table 2).
3 Results and Discussion
The aim of this work is to compare the simulation results of two different models based on its material property modeling. In our case, we study two hardening models: Swift and Voce laws. Another objective was to discover the effect of the resolution method on the springback study meaning we are going to compare the springback results issued from an explicit and an implicit calculation. The simulation was carried out on a calculator with an Intel® coreTM2 i7-6700 CPU processor and 8 GB of RAM.
We are mainly focusing on the springback phenomena that occurs after the procedure of incremental forming. As mentioned, after releasing the sheet, we remark the occurrence of springback and the change in the final shape of piece caused by the residual stress accumulated during the process. Our goal here is to study this phenomenon through the final shape variation before and after sheet release. Thus, we present two steps: the first one is dedicated for the forming process and the second one is for the springback. We want to study the effect of the resolution methods on the final results especially the springback output. Thus, we propose two sets of tests (Table 3).
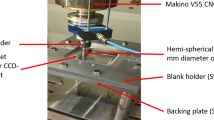
The simulation results are compared with the experimental results conducted by [2] using a 3-axis CNC vertical milling machine.
Since the material is anisotropic, we will start by comparing the results from both models and the experiment results by extracting the final shape of our specimen before springback along X and Y-axis respectively (Fig. 2).

Shape comparison before the appearance of springback a Along X b Along Y
From the last two figures, we can see a good agreement between the CAD geometry and the simulation outputs. In the first figure, we can remark also that the Voce model is closer to the theoretical results especially along Y axis. On the other hand, the Swift model present a more important deformation especially on the bottom of the cone, which does not exist in the CAD profile. Since the results along Y axis are more accurate, for Voce and Swift models, alike in the following figures we will only present the results along this axis.
In the following part, we will compare the total deformation of our specimen after releasing the sheet and removing all type of fixation. As mentioned before, the springback study is done through an implicit and an explicit step to see the difference. It should be mentioned that for the springback step, we applied a boundary condition by limiting the displacement of 3 nodes in the upper part of the specimen (see Fig. 3).

The disposition of the 3 fixation points
We will start by presenting the final shape results extracted from the explicit-explicit calculation. Figure 4 present a comparison between the experimental profile and the numerical one deduced from the simulation for both Swift and Voce laws.

Final shape comparison resulting from the explicit calculation and the experimental measurements after springback
The first remark is that the Voce model presents a more important springback when compared with the Swift results, especially in the fixation zone (zone 1). Nevertheless, it can be noticed, that both models become closer to the experimental one especially in the wall region, noted (zone 2) in the Fig. 4. For the overall shape, the Voce hardening law still presents a good agreement with the real results, if you took into consideration that the Swift law shows an important deformation on the bottom of the cone, indicated by (zone 3).
Now we move to present the results from the explicit-implicit test. The most important advantage of using the implicit method is that it takes almost no time to calculate the results when compared to the explicit one. In addition, the combination scheme of explicit and implicit is preferred to predict the springback, resulting in more numerical stability and accuracy. The following figure shows a comparison between the experimental approach, the voce and the swift models from the implicit work (Fig. 5).

Final shape comparison resulting from the implicit calculation and the experimental records after springback: profiles of the formed parts along the central cross-section (along the YZ plane)
In accordance with the explicit results, we observe that the Voce model presents a springback more important than that found on the explicit-explicit test. Zone 3 shows clearly that the deformed profile predicted by means of the Swift model is very distant from the real shape. We also can see from zone 1, that the amount of deformation is not very remarkable. On the other hand, it can be observed from the Voce model that the springback produced in zone 4 caused the irregularity to increase and the final shapes presents a deviation when compared with the experimental results, but this difference is small. Unfortunately, we do not have the evolution of the geometry after springback experimentally, thus we cannot conclude which results to consider reliable. However, through the three previous comparison, we can conclude that the Voce model offers more acceptable results than the Swift model.
To make the comparison clearer, we chose in this part of study to make a comparison between the two numerical analysis: implicit and explicit FEM methods applied for prediction of the cross-sectional profiles of the final deformed shapes after springback, for both Swift and Voce. Figure 6a, b illustrate the numerical prediction and the measurement of the geometrical profile along the symmetric axis. We remark that the implicit model gives us better springback results when compared with the explicit one, for both Swift and Voce. We can see that the implicit results are closer to the experimental results when comparing the final profile. In Fig. 6b, the fixation zones presents an important springback, which makes us confirm that the Voce model through the explicit methods could not be taken into account. However, from the implicit-Voce results, we could see good agreements with the real profile. On the other hand, for both the explicit and the implicit methods, the Swift model shows results, which can be described, as not fitted as shown in Fig. 6a.

A comparison of explicit and implicit predictions of the profile along the depth of the final geometry for: a the Swift model and b the Voce model
Finally, we present the sheet thickness profiles of the cones, which are plotted against the radial dimension. They are deduced from both Swift and Voce models and compared with the theoretical model derived from the so-called sine law and defined by the relation relationship (1).
In Fig. 7, the evolution of the thickness profiles of two truncated cones formed of an aluminum alloy sheet AA1050 predicted numerically for Voce and Swift and by adopting the implicit schemas.

Numerical prediction of the final sheet thickness evolution along the radial position with combined numerical approach
In our case, the final predicted sheet thickness would be 0.3 mm. The figure above shows a comparison between the Swift and Voce outputs and the Sinus law. We can see a crucial thinning in the right wall of the cone, which could risk the destruction of the specimen. Thus, the thinning peak in the simulation prediction could be explained.
It can also be shown that the thickness at the bottom of the cone remains almost unchanged, whereas the thickness in the wall region is reduced abruptly from 0.6 mm to 0.15 mm and 0.2 mm, respectively for the hardening laws: Swift and Voce models (Fig 8).

Final manufactured part by SPIF: actual photo
4 Conclusion
Multiple comparisons have been presented in this work, we studied the simulation results from two proposed hardening models, Swift and Voce, by comparing the final shape obtained with the experiment results. We started by studying the anisotropy of the both models and it was shown that anisotropy has no main effect on the desired results. When comparing both models before springback occurrence, it was concluded that Voce model is closer than the Swift model to the CAD shape. Since Springback is a notorious phenomenon in incremental sheet forming, we carried a comparison between the springback results predicted from an implicit and an explicit calculation method and in the same time, we presented the results issued from both hardening laws, i.e., Swift and Voce. When comparing the simulation profiles with the experimental ones, we could deduce that the explicit method offers an important springback especially for the Voce model. On the other hand, the Voce implicit springback step shows a good agreement with the real shape. Concerning the Swift model, all the results from the implicit and the explicit calculations present a deviation from the experimental shape, especially in the bottom of the cone. As a recapitulation, we can conclude that the Voce model gives as results that are closer to the reality and that obviously the implicit method has the closer profile, but the explicit method, despite being time consuming, gives results that can be acceptable as well. An experimental campaign will be carried out. First to confirm, with a great certainty, the most efficient model for springback, and second to study the effect of different parameters such as cone depth, tool vertical step and fixation method on the springback.
References
Ben Ayed L, Ben Robert C, Delam A (2014) Simplified numerical approach for incremental sheet metal forming process. To cite this version: Science Arts & Métiers (SAM). Eng Struct 62:75–86
Boudhaouia S, Gahbiche MA, Giraud E (2018) Experimental and numerical study of single point incremental forming for a spiral toolpath strategy. Lect Notes Mech Eng 1007–1015. https://doi.org/10.1007/978-3-319-66697-6_99
Edwards WL, Grimm TJ, Ragai I, Roth JT (2017) Optimum process parameters for springback reduction of single point incrementally formed polycarbonate. Procedia Manuf 10:329–338. https://doi.org/10.1016/j.promfg.2017.07.002
Nimbalkar DH, Nandedkar VM (2013) Review of incremental forming of sheet metal components. Int J Eng Res Appl 3:39–51
Sbayti M, Bahloul R (2015) Numerical study of warm sheet incremental forming process. In: The 6th international congress design and modelling of mechanical systems CMSM’2015
Sbayti M, Bahloul R, Belhadjsalah H, Zemzemi F (2018) Optimization techniques applied to single point incremental forming process for biomedical application 1789–1790
Shamsari M, Mirnia MJ, Elyasi M, Baseri H (2018) Formability improvement in single point incremental forming of truncated cone using a two-stage hybrid deformation strategy. Int J Adv Manuf Technol 94:2357–2368. https://doi.org/10.1007/s00170-017-1031-5
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Khalfallah, A.B., Elechi, S.B., Bahloul, R. (2020). Experimental Investigation and Finite Element Modeling on Incremental Forming Process of Aluminum Sheet Alloys. In: Aifaoui, N., et al. Design and Modeling of Mechanical Systems - IV. CMSM 2019. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-030-27146-6_33
Download citation
DOI: https://doi.org/10.1007/978-3-030-27146-6_33
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-27145-9
Online ISBN: 978-3-030-27146-6
eBook Packages: EngineeringEngineering (R0)