
Abstract
Evolutionary-computing-algorithm-based nonlinear active noise control (ANC) removes the requirement of secondary path modeling, which is essential for proper functioning of a conventional gradient-descent-approach based ANC system. However, the noise mitigation capability of such algorithms is largely dependent on the proper selection of the agent count as well as on the number of sound samples processed by an agent in a given iteration. In order to alleviate this dependency, we propose a dynamic nonlinear ANC (DNANC) system, which adapts its parameters in accordance with the acoustic scenario under consideration. The nonlinear ANC (NANC) problem has been formulated as a multi-objective optimization problem in this chapter. We have used the non-domination sorting genetic algorithm II (NSGA-II) for solving the optimization task. The conflicting objectives employed in this chapter are the ensemble mean-square error and the computation time. The proposed DNANC system has been shown to adapt itself to several ANC scenarios in a dynamic manner, wherein, the controller structure has been optimized for the situation considered.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Nonlinear active noise control
- Functional-link artificial neural network
- Non-domination sorting genetic algorithm II
- Particle swarm optimization
- Differential evolution
- Cuckoo search algorithm
1 Introduction
The field of noise cancellation can be broadly divided into two categories: passive and active. Active noise control (ANC), which is based on the principle of destructive superposition of sound waves, has seen enhanced interest in the recent past owing to advances in control theory as well as the availability of improved processing capability. In its basic form, a feed-forward ANC system consists of a reference microphone which senses the noise, an active loudspeaker which produces the necessary anti-noise, and an error microphone to measure the level of noise mitigation attained [14]. The active loudspeaker is driven by an adaptive controller, which has a transfer function W(z).
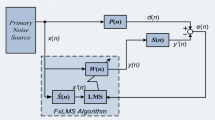
Figure 23.1 shows the block diagram of a filtered-x least-mean-square (FxLMS) based ANC system. In the figure, P(z) is the transfer function of the primary path (the acoustic path from the reference microphone to the error microphone), S(z) is the transfer function of the secondary path (the electroacoustic path from the output of the adaptive controller to the output of the error microphone), \( \hat{S}(z) \) is the transfer function of a model of the secondary path, W(z) is the transfer function of the adaptive controller, x(n) is the reference signal, d(n) is the primary path output, y(n) is the output of the adaptive controller, \( \hat{d}(n) \) is the output of the secondary path, and \( e(n)=d(n)-\hat{d}(n) \) is the error signal. The weight vector w(n) of the adaptive controller is updated using the FxLMS algorithm as
where μ is the learning rate and x ′(n) is the reference signal vector filtered through \( \hat{S}(z) \).

Block diagram of an FxLMS algorithm based ANC system
The basic FxLMS algorithm, which uses a finite-impulse-response (FIR) filter as the adaptive controller, is designed on the assumption that the primary and secondary paths are linear. In the actual implementation of an ANC system, the primary and secondary paths may offer nonlinearities, and the FxLMS-based ANC system can fail to effectively cancel the primary noise. Several nonlinear ANC (NANC) systems have been proposed in the recent past to achieve noise mitigation in a nonlinear environment. A Volterra-filter-based ANC system has been proposed in [21]. Das and Panda [7] have recently developed a nonlinear ANC system based on functional-link artificial neural networks (FLANNs). The same authors have also proposed a filtered-s least-mean-square (FsLMS) algorithm [7] to update the weights of the FLANN. Several newer versions of the FLANN-based ANC system have been reported in the literature that aims to further enhance noise cancellation capability [12, 15, 26].
All the ANC systems discussed so far require an accurate modeling of the secondary path and its model is kept fixed during the operation of the system. Imperfect modeling of the secondary path can cause the ANC system to diverge [3]. In a real-life scenario, the secondary path may vary with time and can affect the performance of the ANC system. Several online secondary-path modeling schemes have been proposed to overcome this limitation [1, 4, 22]. But, most of these schemes require the injection of an additional white noise in order to achieve the modeling [25]. This additional noise adds to the final residual noise and also increases the computational complexity. Some of the other online secondary path modeling methods require additional adaptive filters to achieve the modeling task, and in some cases, the order of the secondary path needs to be fixed apriori [2, 24]. Fixing the order apriori may lead to under or over estimation of the secondary path.
It has been lately reported that the use of meta-heuristic algorithms in ANC systems can remove the requirement of modeling secondary paths. A genetic algorithm (GA) based ANC system has been proposed in [6]. Rout et al. [16, 17] have recently proposed an ANC scheme based on particle-swarm optimization (PSO), wherein the authors design a de-multiplexer/multiplexer arrangement for real-time implementation. A nonlinear ANC system based on a bacterial-foraging algorithm has been reported in [13]. George and Panda [11] extended the approach to nonlinear multichannel ANC systems and introduced a decentralized version that offers flexibility in scaling up a multichannel ANC system. The presence of non-linear secondary paths as well as the use of infinite impulse response filters as the controller may result in a non-quadratic error cost function. The traditional gradient descent algorithms may fall into local minima in such cases and may lead to non-optimal noise cancellation. In addition to avoiding the requirement of secondary path modeling, meta-heuristic-based ANC systems can also avoid this local minima problem. Another gradient-free approach towards ANC has been presented in [19].
The success of the meta-heuristic-based ANC system is largely dependent on the proper selection of the switching quotient Q (the count of sound samples after which switching occurs in a de-multiplexer/multiplexer arrangement) and the population count L. In most of the available literature, these values have been computed experimentally for each of the experiments considered. In a practical implementation of an ANC system, the primary and secondary paths may vary, and fixing Q and L may lead to improper noise mitigation. In order to overcome this limitation of meta-heuristic-based ANC systems, this chapter proposes a dynamic nonlinear ANC (DNANC) system where switching in the de-multiplexer/multiplexer arrangement, as well as the population count of the meta-heuristic algorithm, are adaptively selected based on the ANC scenario. The selection of Q as well as L will be formulated as a multi-objective optimization problem, with the computation time and the ensemble mean-square error (EMSE) as two conflicting objective functions. The non-domination sorting genetic algorithm II (NSGA-II) [9] has been used as the multi-objective optimization algorithm in this work. In addition, the chapter also develops two novel meta-heuristic-based ANC systems, one based on a cuckoo search algorithm (CSA) [23] and the other based on differential evolution (DE) [20], which offer improved noise control over other meta-heuristic-based ANC systems available in literature. All the proposed schemes also avoid the local minima problem existing in ANC systems trained using traditional gradient descent algorithms.
The rest of the chapter is organized as follows. The meta-heuristic-based ANC scenario is discussed in Sect. 1.2. The dynamic nonlinear ANC system proposed in this chapter is designed in Sect. 1.3, which also discusses the various single- and multi-objective meta-heuristic algorithms used in the chapter. An extensive simulation study has been carried out in Sect. 1.4 and concluding remarks are drawn in Sect. 1.5.
2 Meta-Heuristic-Based NANC System
As discussed in the previous section, the FxLMS-based linear ANC system may fail to effectively mitigate noise in the presence of non-linearities. FLANN-based nonlinear ANC systems have gained significant attention in the recent past owing to the low computational complexity offered in comparison with other nonlinear-filter-based ANC schemes. In a FLANN-based nonlinear controller, the reference signal x(n) is functionally expanded before it is input to an adaptive weight network. The functional expansion can be trigonometric, Legendre, or Chebyshev. Trigonometric FLANNs are among the most popular type.
In an FsLMS-based NANC system, the tap-delayed input signal vector x(n) = [x(n), x(n − 1), …, x(n − M + 1)]T of length M is trigonometrically expanded into N terms as
with α as the order of the FLANN filter and N = M (2α + 1). The adaptive weights W (n) are updated as
where μ is the learning rate, e(n) is the error signal and X ′(n) is X(n) filtered through a model of the secondary path. The requirement of secondary-path modeling in an FsLMS-based ANC system can be avoided by using a meta-heuristic algorithm for weight update, which minimizes the objective function E(e 2), where E(·) is the expectation operator. The block diagram of the meta-heuristic-based ANC scheme will be similar to that in Fig. 23.1, except that the dotted block will not be part of the final structure.
The controller structure in a meta-heuristic-based ANC system is similar to the primary meta-heuristic algorithm block in Fig. 23.2. The adaptive de-multiplexer/multiplexer arrangement has to be replaced by a regular de-multiplexer/multiplexer. A meta-heuristic algorithm utilizes a number of agents having different attributes. In the context of an NANC system, the attribute of any particular agent relates to the weight vector, which multiplies the expanded FLANN vector X(n). These attributes help in distinguishing one agent’s performance from that of the other. In conventional meta-heuristic-based filter designs, errors corresponding to all the agents in the meta-heuristic framework are evaluated for every input sample considered. In an online application like NANC, this method is not appropriate, as only a single active loudspeaker and error microphone can be activated to achieve noise cancellation at any given instant.

Schematic diagram of the DNANC system
In order to make this framework online, Rout et al. [16] proposed a de-multiplexer/multiplexer arrangement in a meta-heuristic-based ANC system. At any given time, only one agent is in the active electronic path between the reference microphone and the secondary path. After evaluating Q errors corresponding to the first agent, the fitness of the agent is evaluated as the value of the mean-square-error. After an agent has finished processing Q samples of the input sound, the meta-heuristic engine switches the sound input to the next agent in the population. This process is continued for LQ sound input samples after which the meta-heuristic engine updates the weight vectors corresponding to each agent using the meta-heuristic algorithm. This process is repeated for rest of the primary noise samples.
It is to be noted that, the switching quotient Q and the agent count L in this framework remain constant throughout. However, this may lead to a sub-optimal design of the meta-heuristic controller, owing to the fact that different performance is achieved by this controller in dynamically-changing sound and path environments. Moreover, controller performance also depends heavily on the algorithm type supported by the controller engine. In an endeavour to overcome this limitation of the meta-heuristic ANC scenario, a novel NANC scheme with dynamic Q and L is designed in the next section.
3 Dynamic Nonlinear Active Noise Control System
The noise mitigation performance of an evolutionary-computing-based NANC system is largely dependent on the proper selection of the switching quotient Q and the agent count L. To the best of our knowledge, all the works reported in the field of evolutionary-computing-based ANCs use fixed values for Q and L, which are experimentally determined for a particular ANC scenario. In a practical implementation of an ANC system, fixed values of Q and L may not lead to optimal noise mitigation in a meta-heuristic-based NANC system. This is attributed to the dynamic nature of the ANC environment in terms of the transfer functions of the primary and secondary paths, as well as in terms of the reference noise.
In order to cope with a dynamically changing ANC environment, it is desirable for the meta-heuristic framework to be dynamic in terms of Q and L. A higher value of L can improve the noise cancellation capability of the ANC system. However, this improvement is achieved at the cost of increased computational load. It is desirable to have an optimal combination of Q and L that can simultaneously maximize noise cancellation and minimize computational load. This goal can be achieved by formulating a meta-heuristic-based NANC system as a multi-objective optimization problem. In this chapter, we have considered computational time (τ) and ensemble mean-square error (ξ) as the two conflicting objectives, with Q and L as the controlling variables. In contrast to a conventional meta-heuristic-based NANC system, this approach continuously updates Q and L for improving performance.
The basic form of the dynamic nonlinear ANC system proposed in this chapter is shown in Fig. 23.2. In the figure, the primary meta-heuristic block refers to the meta-heuristic controller in a conventional meta-heuristic-based NANC system as discussed in Sect. 1.2. To allow dynamicity, the traditional de-multiplexer/multiplexer arrangement has been replaced with an adaptive de-multiplexer/multiplexer system. Multi-objective optimization is achieved in the DNANC system by using a secondary meta-heuristic block, containing an evolutionary multi-objective optimization algorithm. The detailed mechanism of the interaction between the primary and secondary meta-heuristic blocks in the DNANC system is discussed below.
The primary meta-heuristic block shown in Fig. 23.2 combines a 1 × L de-multiplexer and an L × 1 multiplexer system. The de-multiplexer/multiplexer arrangement switches the non-linearly expanded sound samples X(n) between the component weight sets (agents for the primary meta-heuristic algorithm) after Q sound samples. As the proposed NANC system is dynamic in nature, the Q and L values are updated according to the existing acoustic scenario. The Q and L update is achieved using a secondary meta-heuristic block, which essentially contains a multi-objective optimization algorithm engine. The meta-heuristic processor should ensure that Q and L belong to a set of natural numbers by approximating the updated Q and L to the next highest integer. In this work, PSO, CSA, and DE have been considered as candidates for the primary meta-heuristic algorithm.
The secondary meta-heuristic algorithm employed in this chapter is the non-domination sorting genetic algorithm II (NSGA-II) proposed by Deb et al. [9]. NSGA-II, which falls under the category of multi-objective optimization algorithms have found successful applications in diverse fields of science and technology. Let f 1(x 1, x 2) and f 2(x 1, x 2) be two objective functions that are conflictive in nature, with x 1 and x 2 as the controlling variables. In a typical NSGA-II-based optimization problem, which aims to simultaneously optimize f 1(x 1, x 2) and f 2(x 1, x 2), the solution set gives rise to a Pareto-optimal front of solutions [9]. A Pareto- optimal front is a curve connecting all the Pareto-optimal solutions [8].
In this chapter, the two objective functions used are the computation time (τ) and the ensemble mean-square error (ξ), and the control variables are Q and L. In a real-time application like ANC, the evaluation of the objective functions for the various agents of NSGA-II requires a modification in the conventional NSGA-II framework, leading to the introduction of a dual 1 × R de-multiplexer and a dual R × 1 multiplexer. The two inputs to the de-multiplexer are the objective function values τ and ξ. For each agent, the two values that the r th agent passes through the multiplexer are Q(r) and L(r). The switching coefficient for the secondary meta-heuristic block corresponding to the r th agent is
where Q(r − 1), L(r − 1) and β p correspond to the switching coefficient, the agent count, and the iteration count, respectively, for the primary meta-heuristic block due to the previous agent of the secondary meta-heuristic algorithm. A flowchart of the proposed NSGA-II based secondary meta-heuristic block is shown in Fig. 23.3 and the schematic diagram of the complete DNANC system is depicted in Fig. 23.2.

Flowchart of NSGA-II based secondary meta-heuristic block
4 Simulation Study
In an endeavour to evaluate the noise cancelling performance of the proposed DNANC system, an extensive simulation study has been carried out in this section. The NSGA-II-based multi-objective optimization algorithm in the DNANC system aims to simultaneously improve noise cancellation and reduce computational load. The level of noise cancellation, which is the first objective function that needs to be minimized, is measured in terms of ensemble mean-square error (EMSE), which is defined as
where E [.] is the expectation operator. The second objective function is the computational time (τ) measured in seconds, which is the time required for the meta-heuristic ANC block to process the given set of input sound samples. Both objective functions have been modelled as functions of two variables: meta-heuristic algorithm switching quotient (Q) and the agent count (L). The switching quotient is the number of samples of sound processed through an agent of the meta-heuristic algorithm before the signal is routed to the next agent of the meta-heuristic framework.
In order to exemplify the robustness of the proposed DNANC system, a total of 9 different testing experiments have been included. Each experiment is a combination of different primary paths, secondary paths, and type of input sound. The various sound types considered are random noise, tonal noise, and logistic chaotic noise. In addition, primary and secondary paths characterized by low-nonlinearity as well as high-nonlinearity have also been used. All the experiments have been carried out in a MATLAB environment on an Intel Core i5 PC, having a 4-GB RAM and 2.60-GHz processor. The algorithms used are CSA, DE, and PSO for the primary meta-heuristic and NSGA-II for the secondary meta-heuristic. The tap length M for the FLANN filter is taken as 2 and the order of the FLANN, α is also 2 for all the cases studied in this chapter. For all the subsequent experiments considered in this chapter, the scaling factor and the crossover rate are taken to be 0.3 and 0.6, respectively, for DE. Similarly, in the case of CSA, the probability of discovering an alien egg is set to the value 0.15 and the step size is chosen to be 0.01, while the Levy flight parameter is chosen to be equal to 2.5. In PSO, the behavioural parameters c 1 and c 2 are set to the values 0.4 and 0.9, respectively, while linearly varying the inertia weight from 0.9 to 0.3 [11].
4.1 Case A: Random Input Noise
A set of three experiments is carried out in with a random input noise, which is uniformly distributed in the range [−0.5, 0.5].
4.1.1 Experiment 1
In this experiment, the primary noise d(n) reaching the error microphone is given by
where x(n) is the input noise [18]. Similarly, the cancelling sound sensed at the error microphone is given by
Figure 23.4 shows the variation of EMSE with respect to time for the proposed DNANC system, implemented using CSA, DE, and PSO. The dynamic behaviour of the proposed method, which is attributed to the usage of NSGA-II, is evident from the variation of the meta-heuristic algorithm switching quotient (Q) and the agent count (L) plotted in Fig. 23.5. Both Q and L have been rounded to the next highest integer in cases where the algorithm returns a fractional value. It can be observed that the three meta-heuristic algorithms employed in this work converge to different values of Q and L. Thus, the DNANC scheme offers the freedom in NSGA-II to select the best Q and L, which minimizes EMSE and computational time simultaneously. The final average EMSE values obtained are −24.04, −20.25, and − 8.07 dBs for the DNANC system with the primary meta-heuristic algorithm taken as CSA, DE, and PSO, respectively. The best Pareto front obtained using NSGA-II with CSA as the meta-heuristic algorithm is shown in Fig. 23.6.

Experiment 1: Variation with respect to time for a DNANC system with CSA, DE, and PSO as the primary meta-heuristic algorithm and random input noise. All results plotted have been averaged over ten independent trials

Experiment 1: Variation of L and Q with respect to time for a DNANC system with (a) CSA, (b) DE and (c) PSO as the primary meta- heuristic algorithm and random input noise. NSGA-II is used as the secondary meta-heuristic algorithm

Experiment 1: The best Pareto front obtained using NSGA-II with CSA as the primary meta-heuristic algorithm and random input noise
4.1.2 Experiment 2
The primary path employed in this experiment is given by
The secondary path [18], as well as all the other simulations parameters used in this experiment, are the same as that of Experiment 1. All other simulation parameters are also similar to that of experiment one. Figure 23.7a shows the variation of EMSE with respect to time for the proposed DNANC system with CSA, DE, and PSO as the primary meta-heuristic algorithm and NSGA-II as the secondary meta-heuristic algorithm. The final average EMSE values obtained are −9.48, −19.27, and − 8.86 dBs for the DNANC system with the primary meta-heuristic algorithm taken as CSA, DE, and PSO respectively.

Experiments 2 and 3: Variation of EMSE with respect to time for a DNANC system with CSA, DE, and PSO as the primary meta-heuristic algorithm and random input noise. (a) Experiment 2, (b) Experiment 3. All results plotted have been averaged over ten independent trials
4.1.3 Experiment 3
In this experiment, a primary path same as that of experiment two is considered. The secondary path considered in this experiment, which is a Hammerstein filter, is given by
where
All the other simulation parameters employed in this experiment are same as that used in experiment two. The change in EMSE with time is depicted in Fig. 23.7b. A final average EMSE of −7.32, −17.74, and − 8.88 dBs have been obtained for the DNANC system with the primary meta-heuristic algorithm taken as CSA, DE, and PSO, respectively.
4.2 Case B: Tonal Input Noise
Two sets of experiments have been conducted considering a sinusoidal signal given by
where f s = 10,000 Hz is the sampling frequency and f n is taken as 500 Hz [5].
4.2.1 Experiment 4
The primary and secondary paths, as well as the other simulation parameters applied in this experiment, are same as that in Experiment 1. The variation of EMSE with time for the DNANC system with CSA, DE and PSO as the primary meta-heuristic algorithms is shown in Fig. 23.8a, where the final average EMSE values are −12.24, −19.27, and − 8.86 dB, respectively. The improved noise mitigation performance of CSA- and DE-based DNANC systems are evident from the results.

Experiments 4 and 5: Variation of EMSE with respect to time for a DNANC system with CSA, DE, and PSO as the primary meta-heuristic algorithm and tonal input noise. (a) Experiment 4, (b) Experiment 5. All results plotted have been averaged over ten independent trials
4.2.2 Experiment 5
In this experiment, the primary path, the secondary path, and the simulation parameters used are same as that of Experiment 2. Figure 23.8b shows the variation of EMSE with time for the three primary meta-heuristic algorithms considered, with final average EMSE of −7.19, −11.98, and − 2.69 dB, respectively.
4.3 Case C: Logistic Chaotic Input Noise
A logistic chaotic input noise is used in the next two experiments, given by
where x(n) = 0.9 for n = 0, 1 and γ = 4 [5].
4.3.1 Experiment 6
The primary path and the secondary path transfer functions used in this experiment are same as that of Experiment 1. The time behaviour of EMSE for CSA, DE, and PSO is depicted in Fig. 23.9a, while the final average EMSE obtained is −20.40, −18.74 and − 7.08 dB respectively. The CSA- and DE-based DNANC systems have been shown to outperform the PSO-based DNANC system for the logistic chaotic input noise considered.

Experiments 6 and 7: Variation of EMSE with respect to time for a DNANC system with CSA, DE, and PSO as the primary meta-heuristic algorithm and logistic chaotic input noise. (a) Experiment 6, (b) Experiment 7. All results plotted have been averaged over ten independent trials
4.3.2 Experiment 7
Another experiment has been carried out using the logistic chaotic noise given by (12). The primary and secondary paths used in this experiment is same as that used in Experiment 3. The improved noise cancellation achieved using CSA and DE primary meta-heuristic algorithms is evident from the variation of EMSE plotted in Fig. 23.9b, with a final average EMSE of −20.40, −18.74 and − 7.08 dBs respectively.
4.4 Case D: Dynamically Changing Environment
In most of the real-life implementations of an ANC system, the type of the noise, as well as the characteristics of the primary and secondary paths, are subject to change. Two experiments have been conducted to evaluate the performance of the DNANC system under such scenarios.
4.4.1 Experiment 8
In this experiment, three different primary and secondary path combinations have been considered for a random noise uniformly distributed between [−0.5, 0.5]. In the first one-third of the primary sound samples, the paths used are same as that in Experiment 2. In the next one-third, the primary and secondary path transfer functions employed in Experiment 1 have been considered. The paths used in Experiment 3 have been used in the last third. The EMSE values are plotted against time in Fig. 23.10a. The dynamic behaviour of the proposed scheme is evident from the results. In order to verify the effectiveness of the proposed scheme for noise control without secondary path modeling, the results obtained in this experiment has been compared with that obtained using an FsLMS algorithm, with online secondary path modeling using the Eriksson’s method [10]. The improvement in noise mitigation as well the enhanced adaptability of the proposed scheme is clear from Fig. 23.10a.

(a) Experiment 8: Variation of EMSE with respect to time for a DNANC system with CSA, DE, and PSO as the primary meta-heuristic algorithm and FsLMS algorithm with online secondary path modelling (using Eriksson’s method) for time-varying primary and secondary paths. (b) Experiment 9: Variation of EMSE with respect to time for a DNANC system and time-varying input noise with CSA, DE, and PSO as the primary meta-heuristic algorithm. All results plotted have been averaged over ten independent trials
4.4.2 Experiment 9
The input noise considered in this experiment consists of tonal noise given by (11) followed by logistic chaotic noise given by (12), which is further followed by random noise uniformly distributed between [−0.5, 0.5]. Each of the noise type considered in this experiment exists for an equal duration during the experiment. The variation of EMSE with time for a DNANC system is shown in Fig. 23.10b. The robustness of the DNANC system to time-varying nature of the primary sound is clear from the results.
5 Concluding Remarks
A DNANC system, which is robust to dynamically changing sound inputs as well as to dynamically changing acoustic system environments, is proposed in this chapter. The dynamic behaviour of the proposed scheme is attributed to the integration of a multi-objective evolutionary algorithm like NSGA-II to an evolutionary-based NANC system. The DNANC framework is a step towards achieving an effective sound cancelling mechanism for ANC systems without the need for secondary path modeling.
References
Akhtar MT, Abe M, Kawamata M (2005) A new structure for feed forward active noise control systems with improved online secondary path modeling. IEEE Trans Speech Audio Proc 13:1082–1088
Akhtar MT, Abe M, Kawamata M (2006) A new variable step size LMS algorithm-based method for improved online secondary path modeling in active noise control systems. IEEE Trans Audio Speech Lang Process 14:720–726
Ardekani IT, Abdulla WH (2012) Effects of imperfect secondary path modeling on adaptive active noise control systems. IEEE Trans Control Syst Technol 20:1252–1262
Aslam MS, Raja MAZ (2015) A new adaptive strategy to improve online secondary path modeling in active noise control systems using fractional signal processing approach. Signal Process 107:433–443
Behera SB, Das DP, Rout NK (2014) Nonlinear feedback active noise control for broadband chaotic noise. Appl Soft Comput 15:80–87
Chang CY, Chen DR (2010) Active noise cancellation without secondary path identification by using an adaptive genetic algorithm. IEEE Trans Actions Instrum Measur 59:2315–2327
Das DP, Panda G (2004) Active mitigation of nonlinear noise processes using a novel filtered-s LMS algorithm. IEEE Trans Speech Audio Proc 12:313–322
Deb K (2001) Multi-objective optimization using evolutionary algorithms. Wiley, Chichester
Deb K, Pratap A, Agarwal S, Meyarivan T (2002) A fast and elitist multi-objective genetic algorithm: NSGA-II. IEEE Trans Evol Comput 6:182–197
Eriksson LJ, Allie MC (1989) Use of random noise for on-line transducer modeling in an adaptive active attenuation system. J Acoust Soc Am 85:797–802
George NV, Panda G (2012a) A particle swarm optimization based de- centralized nonlinear active noise control system. IEEE Trans Instrum Meas 61:3378–3386
George NV, Panda G (2012b) A robust filtered-s LMS algorithm for nonlinear active noise control. Appl Acoust 73:836–841
Gholami-Boroujeny S, Eshghi M (2012) Non-linear active noise cancellation using a bacterial foraging optimisation algorithm. IET Signal Proc 6:364–373
Kuo SM, Morgan DR (1999) Active noise control: a tutorial review. Proc IEEE 87:943–975
Patel V, Gandhi V, Heda S, George NV (2016) Design of adaptive exponential functional link network-based nonlinear filters. IEEE Trans Circuit Syst I Regul Papers 63:1434–1442
Rout NK, Das DP, Panda G (2011) Particle swarm optimization based active noise control algorithm without secondary path identification. IEEE Trans Instrum Meas 61:554–563
Rout NK, Das DP, Panda G (2016) Particle swarm optimization based nonlinear active noise control under saturation nonlinearity. Appl Soft Comput 41:275–289
Sicuranza GL, Carini A (2011) A generalized FLANN filter for nonlinear active noise control. IEEE Trans Audio Speech Lang Process 19:2412–2417
Spiriti E, Morici S, Piroddi L (2014) A gradient-free adaptation method for nonlinear active noise control. J Sound Vib 333:13–30
Storn R, Price K (1997) Differential evolution-A simple and efficient heuristic for global optimization over continuous spaces. J Glob Optim 11:341–359
Tan LZ, Jiang J (1997) Filtered-X second-order Volterra adaptive algorithms. Electron Lett 33:671–672
Tyagi S, Katre V, George NV (2014) Online estimation of secondary path in active noise control systems using Generalized Levinson Durbin algorithm. In: Proceedings of the 19th international conference on digital signal processing, pp 552–555
Yang XS, Deb S (2009) Cuckoo search via L´evy flights. In: Proceedings of IEEE world congress on nature & biologically inspired computing, pp 210–214
Zhang M, Lan H, Ser W (2001) Cross-updated active noise control system with online secondary path modeling. IEEE Trans Speech Audio Proc 9:598–602
Zhang M, Lan H, Ser W (2005) On comparison of online secondary path modeling methods with auxiliary noise. IEEE Trans Speech Audio Proc 13:618–628
Zhao H, Zeng X, Zhang J (2010) Adaptive reduced feedback FLNN filter for active control of nonlinear noise processes. Signal Process 90:834–847
Acknowledgements
This work was supported by the Department of Science and Technology, Government of India under the Fast Track Scheme for Young Scientists (SERB/ET-0018/2013).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Patwardhan, A.P., Patidar, R., George, N.V. (2020). Dynamic Nonlinear Active Noise Control: A Multi-objective Evolutionary Computing Approach. In: Bennis, F., Bhattacharjya, R. (eds) Nature-Inspired Methods for Metaheuristics Optimization. Modeling and Optimization in Science and Technologies, vol 16. Springer, Cham. https://doi.org/10.1007/978-3-030-26458-1_23
Download citation
DOI: https://doi.org/10.1007/978-3-030-26458-1_23
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-26457-4
Online ISBN: 978-3-030-26458-1
eBook Packages: EngineeringEngineering (R0)