
Abstract
Lifting, carrying and lowering of loads are still essential activities of logistics today, for example in order picking and sorting jobs. So-called exoskeletons are intended to physically relieve employees of manual load handling. Such devices are designed to decrease the load on the back by taking over a part of the required momentum. The devices are worn on the body and are intended to provide the employees with strength support during load manipulation in order to reduce the load on the spine. Individual operating experiences under real working conditions concerning the suitability and effectiveness of exoskeletons in load handling are now available. In an intervention study a passive back-supporting exoskeleton was tested with experienced staff.
This poster shows the main results of the study with eight male workers, lifting and carrying parcels with and without a passive exoskeleton in a familiar working environment. Some key questions of this study were: Does the use of these assistance systems create additional health risks for employees? Which safety aspects have to be taken into account and which have to be considered in the risk assessment? For this purpose, measurements of the electric muscle activity of stressed back muscles, recording of kinematic data as well as employee interviews (e.g. subjective feeling of discomfort, acceptance) were carried out. The results show only moderate relief effects for the analyzed workplace. Adverse effects caused by wearing the exoskeletons require careful consideration of the application of the examined exoskeleton.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Manual material handling in order picking, which is characterized by increased physical strain, a high repetition rate and/or unfavourable working postures, still are a health hazard to employees today. According to BKK statistics from 2016, work-related diseases of the musculoskeletal system and connective tissue in particular still account for a considerable proportion of days of incapacity to work (over 30%, see [1]). A number of companies are trying to find ergonomic solutions to reduce the load on the spine. The use of assistance systems worn on the body could have positive effects on the lower part of the back due to load redistribution when bending the torso (see [2,3,4]). For picking in warehousing and handling operations, where lifting and lowering heavy loads can be seen as the cause of increased strain on the spine an assistance system should be used in a selected work area. A company from the logistics industry wants to use exoskeletons to lower the load on employees at working places, where it is very difficult to transfer loads with other technical lifting devices.
From the types of exoskeletons currently available on the market (cf. systematization according to [5, 6]), a passive system was chosen to support the erection of the back during load handling. When the upper body is bending forward, the device supports back and chest with flexible tubes. In this way it transfers part of the load from the lower back to the chest and to the legs. The restoring force of a spring-damper system assists in raising the upper body upright (see [7, 8]). A major objective of the intervention study is to quantify the degree of support provided by a passive exoskeleton and to examine the advantages and disadvantages from the point of view of the employees in the selected work area. Ultimately, the use of such assistance systems should result in positive developments with regard to back health (e.g. possible reduction of physical complaints and diseases in the lower back area, see [2]).
2 Methodology
Work process analysis: The analyzed activities in the member company in the logistics work area include the picking of goods. The goods to be transferred were delivered in the form of individual parcels on pallets. Manual handling included lifting the load from the pallet, carrying the parcel (alone or in pairs; with or without transport cart) and placing the load in a transport trolley.
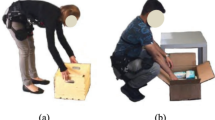
Figure 1 shows various typical postures and movements: The removal of a parcel from the lower pallet level (Fig. 1, left) or the carrying of a parcel on a shoulder (Fig. 1, right). In addition, data were collected on secondary activities (e.g. walking without a load). In total, the data of eight employees, who performed the activities as a couple over a period of two hours, could be collected. The test persons worked in pairs with and without exoskeletons (i.e. one with and one without an assistance system for one hour each).

Left: Lifting of a parcel from a pallet (lower area); Right: Carrying a parcel with exoskeleton (parcel on shoulder)
The project partner, the “Institute for Occupational Safety and Health of the German Social Accident Insurance” (IFA) supports the German Social Accident Insurance Institutions e.g. in workplace measurements and advice. In order to record kinematic data on postures and body movements over the entire measurement period, four three-component acceleration sensors (AX3 type) from Axivity were used by IFA. For the documentation of the activities, time-synchronized video recordings were used. From the sensor data, the torso bending angle and the exoskeleton bending angle (both for the right and left side) were calculated.
The evaluation was activity-based, with each measuring interval being assigned to the corresponding work execution - documented by video. In order to quantify the muscle physiological load changes in the back area (due to the expected reduction due to redistribution of the load) by the exoskeleton in the field, electromyographic measurements (EMG) were carried out on the stressed back muscles (Musculus erector spinae (longissimus) and Musculus erector spinae (iliocostalis)).
Laboratory measurements carried out in advance at the IFA with the exoskeleton concerned provided comparative data for lifting loads up to a maximum of 25 kg. The measurement system developed at the IFA with the evaluation program WIDAAN is described including further references to the literature [9]. Immediately after the measurement phase, a test person survey took place: In addition to the subjective perception of stress during the activities, data were collected on the perceived support and wearing comfort of the assistance system used.
3 Results
In connection with the exoskeleton support used, the differentiated activity analysis revealed the relevant partial activities of lifting the load, carrying the load single, carrying the load in pairs, placing the load and walking without load. Other partial or secondary activities such as sitting or bending with static torso support [10] did not occur during the period under study. According to the workflow analyses, the average weight per parcel was approx. 24 kg (range from 3 kg to a maximum of approx. 50 kg) per employee. The distance covered when carrying the load ranging from 5 m to a maximum of about 15 m.
On average, 46 lifting, carrying and placing operations were carried out per hour. Depending on the number of employees, between 0.8 and approx. 1.1 tons of load are moved per hour. All eight test persons who took part in the tests were professionally experienced (on average approx. 2.7 years) and on average approx. 29 years old at the time of the examination (standard deviation 5.7 years). Wearing the exoskeleton did not fundamentally influence the torso postures or torso movements based on the median of the torso bending angle. However, a tendency towards strong bending and upright to slightly overstretched torso postures was observed more frequently.
Due to its function, the passive exoskeleton can only have a positive supporting effect in this working environment when lifting and lowering loads. According to the manufacturer, the torque support at hip joint level is between 15 Nm and 30 Nm depending on the direction. As a result, the system can only compensate approx. 6% of the total torque to be applied at the level of the hip joints when lifting and lowering heavy loads (here 25 kg). In the survey, the test persons confirmed that the exoskeleton used here provided noticeable support (mean value 29%, relief effect on the visual analogue scale of maximum 50%), especially when lifting loads and in a supporting posture.
The wearing comfort of the system was rated rather negative. Five test persons complained of pressure points on the chest and thighs after one hour of use (see Fig. 2) - three test persons did not. Overall, the test persons rated the support as moderate with regard to the job requirements given.

Complaint regions where the exoskeleton is perceived as uncomfortable (e.g. pressure points)
4 Discussion and Conclusion
The results show a substantial relief effect caused by a supported posture when lifting and placing parcels. The level of the relief effect is, however, only moderate in terms of muscle activity (EMG reduction) (5–10% MVC, MVC: Maximum Voluntary Contraction). With regard to the hip joint moment to be applied when lifting heavy parcels (25 kg), the balance is similar, so that the biomechanical efficiency can only be described as moderate here. The time required for lifting and lowering at the workplace is on average under six minutes per hour. The other considerably longer lasting activities such as carrying the load and walking without load rather cause a disturbing effect of the system and therefore the suitability of the exoskeleton used here is clearly relativized. Since very heavy parcels weighing more than 25 kg have to be transported relatively frequently in the work area, the use of a passive exoskeleton system generally appears to be of little use, as only a portion of the basic load is removed here and thus the overall effectiveness decreases. The subjectively perceived discomfort in the chest and thighs also shows the need for optimization of such exoskeletons. If the results of field studies are compared with exoskeletons in industry, the results of the employee interviews show a similar rating of discomfort. According to [7], the test persons (n = 18) felt an increase in complaints in the chest region and on the thighs when wearing an exoskeleton of the same structure. The principle of load redistribution means that an increasing discomfort is perceived for the additional burdening body regions chest and thighs [7].
5 Outlook
Although it was found that a passive exoskeleton of this type is not appropriate, especially in the field of work under investigation, companies should continue to seek and test assistance systems to lower the burden on employees. Until now exist no long-term studies on the use of the exoskeletons in industry [3]. Since no long-term studies on the use of the exoskeleton tested here exist to date, possible long-term consequences cannot be ruled out. For example, the facilitation of work could result in a loss of coordination, which could lead to increased strain on the back when working without an assistance system. Basically it has to be considered that the use of such an exoskeleton when lifting and setting down loads can lead to a redistribution of the back load, but a change in behaviour in favour of a more back-friendly work (with regard to the posture) cannot be assumed.
References
BKK 2016: AU-Kennzahlen nach Wirtschaftsgruppen, Bundesländern, Altersgruppen, Berufsgruppen und Diagnosehauptgruppen, Januar 2016. https://www.bkk-dachverband.de/fileadmin/gesundheit/monatsauswertungen/Summen_Gesamtergebnis_01_Januar_2016.pdf
Hensel, R., Keil, M., Bawin, S.: Feldstudie zur Untersuchung des Laevo-Ergoskelettes hinsichtlich Usability, Diskomfort und Nutzungsintention. In: Tagungsband des 64. Frühjahrskongresses der Gesellschaft für Arbeitswissenschaft. GfA-Press, Dortmund (2018)
Steinhilber, B., Seibt, R., Luger, T.: Einsatz von Exoskeletten im beruflichen Kontext – Wirkung und Nebenwirkung. Zeitschrift ASU Arbeitsmed Sozialmed Umweltmed 53, 662–664 (2018)
Bosch, T., van Eck, J., Knitel, K., de Looze, M.: The effects of a passive exoskeleton on muscle activity, discomfort and endurance time in forward bending work. Appl. Ergon. 54, 212–217 (2016)
BGHM 2017: Einsatz von Exoskeletten an (gewerblichen) Arbeitsplätzen. Fach-Information Nr. 0059
DGUV 2018: Fachbereichs-Information. Fachbereich Handel und Logistik, BGHW. FBHL 006
Hensel, R., Keil, M.: Subjektive Evaluation industrieller Exoskelette im Rahmen von Feldstudien an ausgewählten Arbeitsplätzen. Zeitschrift für Arbeitswissenschaft 72(4), 252–263 (2018)
Hensel, R., Keil, M., Mücke, B., Weiler, S.: Chancen und Risiken für den Einsatz von Exoskeletten in der betrieblichen Praxis. ASU Arbeitsmed Sozialmed Umweltmed 53, 654–661 (2018)
IFA: CUELA-Messsystem und Rückenmonitor. Webcode d5128, 10 January 2019. https://www.dguv.de/ifa;/fachinfos/ergonomie/cuela-messsystem-und-rueckenmonitor/index.jsp
Baltrusch, S.J., van Dieën, J.H., van Bennekom, C.A.M., Houdijk, H.: The effect of a passive trunk exoskeleton on functional performance in healthy individuals. Appl. Ergon. 72, 94–106 (2018)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Winter, G., Felten, C., Hedtmann, J. (2019). Testing of Exoskeletons in the Context of Logistics - Application and Limits of Use. In: Stephanidis, C. (eds) HCI International 2019 - Posters. HCII 2019. Communications in Computer and Information Science, vol 1033. Springer, Cham. https://doi.org/10.1007/978-3-030-23528-4_37
Download citation
DOI: https://doi.org/10.1007/978-3-030-23528-4_37
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-23527-7
Online ISBN: 978-3-030-23528-4
eBook Packages: Computer ScienceComputer Science (R0)