
Abstract
Exoskeletons are an innovation that have been increasingly explored in various fields. In fact, industries are one sector that have been investing in the studies of this new equipment to answer the unnecessary efforts made by the operators, where technical and organizational measures implemented are not enough to reduce the risk exposure to demanding working conditions. Hence, a study was conducted to understand the operator’s perceptions in the workplace regarding the use of a low back passive exoskeleton (Laevo). Ease of performing the different tasks with the use of the exoskeleton, ease of use, discomfort, perceived effort with and without the use of this equipment, acceptance, usability, and intention to use it, were the parameters assessed in this study. The exoskeleton was tested in 3 workstations, by a total of 23 workers during tasks that required trunk flexion, manual material handling or both in an automotive industry. The goal was to develop a pilot test, study the participants' perceptions and opinions, and conclude whether the exoskeletons are ready for the industrial context in non-cyclic processes.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Throughout the years, not only the number of industries has been increasing but also the technologies used in their environment. Despite the advantages, the workload has increased, along with the number of individuals exposed to work related musculoskeletal disorders (WRMD). WRMD ends up being a problem related not only to the employee’s health but also to the prejudice of companies in terms of productivity and economics. Therefore, companies keep continuously trying to improve working conditions through ergonomic approaches [1,2,3].
However, despite the various efforts of Ergonomics to adapt tasks that initially cause disorders in the human body and avoiding unnecessary efforts through technical and organizational measures, there is still a need to look for new solutions, since it is not always possible to implement them, and when implemented, often the risk of development of WRMD still exists. With the development of technologies, more companies are adapting to robotization and automation, being exoskeletons, an innovation increasingly explored. Exoskeletons aim to provide support when other preventive measures are not feasible or effective and when automation is not viable due to the constant change of tasks in the workstation [4].
Exoskeletons are mechanisms that support the user’s body by assisting demanding postures and movements, which allows a reduction of the metabolic load on the user’s body and consequently may reduce the risk of injury and fatigue [5]. Exoskeletons can be active or passive. Active exoskeletons have the ability to increase the strength of the user, in different areas of the body, through an external energy source (for example, electric motors or hydraulic actuators) that contributes mechanically to the joint moment [6, 7], while passive exoskeletons reduce the impact of a movement on the user's body, through the redistribution of the force generated by the movement of the user's body or by the movement of loads, to different regions of the body, having no external energy source but components such as springs and dampers [2, 6]. They can support the entire body, upper limbs, trunk, or specific segments.
With that said, exoskeletons were created to help mostly in the areas of medicine and military, however they are being increasingly explored in industries [8]. The objective is to assist workers during demanding working conditions such as manual material handling, forward bending and overhead work. Hence, for the industrial sector, passive exoskeletons that support mostly the trunk and upper limbs are the most sought. There have been more studies about them over the years, and despite being a mechanism still under development, there are already studies that demonstrate its potential. According to Iranzo and collaborators [2], for example, it is shown that a passive exoskeleton for trunk support can reduce 34% and 18% of the deltoid and the trapezius muscular activities, which can lead to a reduction of discomfort and fatigue, and consequently to the possibility of increasing the worker’s performance. Most studies are generally carried out in laboratory; however it is important to conduct tests in an industrial context due to the various characteristics that this environment covers, mainly in terms of versatility and automation.
When analysing an equipment or any technology, it is important to study not only objective measures but also subjective ones. Objective measures allow researchers to prove existing advantages, however, it is also important to study the user’s perception since if they don’t perceive those effects, their acceptance and motivations to use the equipment might reduce [6]. Therefore, it becomes relevant to study the user’s perception regarding acceptance and intention of use. Perceived effort, discomfort and ease of use of the exoskeleton are also factors to study once they might influence the user’s acceptance [1].
The aim of this study was to access the subjective evaluation of a passive exoskeleton, through the user’s perception, in three different working stations with non-cyclic tasks that require forward bending, trunk rotation and/or manual material handling, in an automotive industry.
2 Methods
2.1 Participant’s and Workplace Selection
For the selection of the workplaces where the exoskeleton was tested, the following criteria were used: (i) golden standards reported in the literature; (ii) recommendations given by the manufacturer; (iii) results from the workplaces ergonomics assessments, mainly regarding posture risk factor. Therefore, the workplaces selection was based on the following parameters: trunk bending (20° to 60°) more than 30% of the work cycle, high trunk bending (more than 60°) more than 5% of the work cycle and manual material handling of more than 3 kg.
According to these criteria, three workstations in the Press area were selected:
-
workstation 1 (Presses - TAPs 1/3/4: grab pressed parts and place them in the respective containers),
-
workstation 2 (Business Unit: construction and manual tooling of molds to make press parts),
-
workstation 3 (Maintenance Tool & Die: maintenance and manual tooling of molds to make press parts).
All these workstations are mostly dynamic, complex and have a great variety of cyclic and non-cyclic tasks. However, in the present study only the analysis of non-cyclic tasks were performed.
The participation in this study was voluntary, with a set of requirements to be fulfilled: workers must have more than 3 months of experience in the tasks under study, the medical department must approve the participation of each individual (participants must have no medical restrictions to perform the tasks defined) and their anthropometry must fit the exoskeletons specifications (heights between 164 cm and 196 cm). Thus, the total number of workers who participated in this study was 23, distributed as follows: workstation 1 - 7 participants, workstation 2 - 4 participants and workstation 3 - 12 participants.
2.2 Passive Exoskeleton
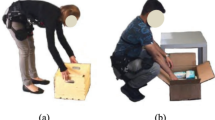
For this study, a passive exoskeleton (Laevo V.2.56) was tested. Laevo is designed to support the trunk during repetitive and/or static tasks that require bending. It weighs 2.8 kg and consists of a chest pad, two structures around the thighs, a hip strap to keep the exoskeleton in a steady position, and a smart joint mechanism. The chest pad and the components around the thighs are connected through rigid bars running over a smart joint which allows the user to perform a trunk flexion with less low back effort while creating a resistance in the chest and thighs. Regarding the smart joint, it is possible to adjust the support angle from 0° to 35°. Although this exoskeleton has 5 different rigid bars sizes available, for this study only 4 were obtained, which led to the requirement that heights needed to differ between 164 cm and 196 cm to ensure the right adjustments.
2.3 Testing Procedure and Materials
The test in each workstation lasted approximately 4 weeks and the exoskeleton was only used when the participants were performing tasks adequate for the study, depending on the rotation of the team.
The first step of the testing procedure was to present the pilot test and introduce the exoskeleton to the teams working in the selected workstations. After that, volunteers signed an informed consent, authorizing the participation in the study and the collection of personal data.
Before the start of the pilot test, participants were submitted to an initial medical evaluation which provided the eligibility of each participant to the study. On the first day of testing, there was initially a period of training, so the participants learned how to use and how to don and doff the equipment. The first test lasted no longer than 30 min and in the following days, when possible, there was an increase in the duration of the test, so that there could be an adaptation period. The maximum usage time was established as 2 hours/day per participant.
At the end of each use of the exoskeleton, two different questionnaires based on subjective indexes were applied. One after the usage on the first and last day, and the other on the remaining days (daily questionnaire). In the daily questionnaire, questions related to the perceived ease of performing different tasks with the use of the exoskeleton were applied, to conclude which tasks were more adequate. Its questions were based on Single Use Question (SEQ) [9] and a 7-point Likert scale with “1 - very easy” and “7 - very hard”. The initial and final questionnaire collected the participants’ perception regarding perceived effort, discomfort, perceived usability, and ease of use (donning and doffing the exoskeleton and angle regulation), and intention to use. Perceived effort was classified for each body region for the conditions with and without the exoskeleton, using the Borg CR-10 scale. Regarding discomfort, its classification might be referring to pressure, heat, perspiration, friction, skin irritation, among others. For its evaluation, a scale based on a 7-point Likert scale was used with “1 - minimum discomfort” and “7 - maximum discomfort”. Perceived usability was classified based on the Post-Study System Usability Questionnaire (PSSUQ) [9] evaluating the usefulness, interface quality and satisfaction. In total 10 questions were applied, and a 7-point Likert scale was used with “1 - don’t agree” and “7 - totally agree”. Regarding ease of use, two questions were added related to the ease of donning and doffing of the exoskeleton and the regulation of the support angle. Lastly, the intention of use was classified through two questions based on the Technology Usage Inventory model [10] concerning wanting to have access to the exoskeleton and intention to use it. The scale used for classification of ease and intention of use was a 7-point Likert scale in terms of agreement “1 - don’t agree” and “7 - totally agree”. In both questionnaires, participants could also give feedback regarding their opinions and complaints. The analysis was made by grouping the comments into clusters and verifying the frequency that each one was mentioned.
After the conclusion of the test period, all participants were subject to a final medical evaluation by the medical department.
The survey tool used in this study was based on Hensel and Keil’s [11] and Ferreira and collaborators’ [1] studies, and on methodologies considered relevant derived from the literature review.
3 Results and Discussion
Keeping in mind that the objective of this study was to study non-cyclic tasks that involve trunk flexion, it was possible to conclude how diverse tasks can be while using the exoskeleton and which postures are more favourable. Taking this in account, for all workstations, participants reported that in general, the exoskeleton helped them performing most of the tasks, however they also reported some limitations. In tasks that involved heavy material handling, the participants reported that the exoskeleton made the task easier to perform. Nevertheless, tasks that were most dynamic and involved various postures were classified as harder to perform. Additionally, for tasks that involve slight bending forward, the exoskeleton might sometimes disturb rather than help performing the task. Considering the three workstations, workstation 3 was the one where most participants reported that the use of the exoskeleton made their tasks easier to perform, although their tasks involved various postures, since it also involved static trunk flexion. In workstation 2, for tasks similar to workstation 3 participants reported likewise.
In terms of perceived effort with and without the exoskeleton, in most body regions there was perceived a decreased effort with the exoskeleton in all workstations. Differences were stated on the lower back, chest, and hips in all three workplaces. Besides that, workstation 1 and 3 also reported the upper back and abdominal region as a decrease in effort with the use of the exoskeleton. Additionally, participants in workstation 1 also reported the perceived effort on the neck, shoulders, thighs, and knees as significant. In general, throughout the study the perceived effort maintained or decreased in all body regions. However, in workstation 2, the knees were reported with a slight increase (decimal difference) in the perceived effort since some participants tend not to bend their knees while wearing the exoskeleton causing a bigger effort on this region. Besides, the structure of the exoskeleton that is in contact with the thighs, depending on the length of the workers' legs, can be very close to the knees causing an increased effort on this region. Analysing the results reported regarding the chest for this workstation, we can verify that participants perceived a decreased effort with the exoskeleton on the first day, but on the last day they reported an increase. Its reason is related to the tasks performed since on the last day tasks that required stronger bending were performed causing a bigger pressure in this region. Data also showed that in workstation 2, on the last day of use, participants perceived a slight increase of effort on the abdominal region and thighs. These increments happened due to the tasks that were not 100% suitable for the exoskeleton since they required strong bending of the trunk which leads to a higher pressure and effort in these regions. Angle adjustment from which the exoskeleton will provide the mechanical support is settled initially by the user (often before donning). Whenever dynamic tasks take place and readjustments are needed, workers tend to skip the readjustment step (due to time pressure) and therefore the mechanical support settled will be appropriate for some tasks and disturb while performing others. Analysing the three workplaces, we can conclude that regions where the perception of effort is higher, are also the regions that are exposed to higher physical working demands. In general, the body regions where it is perceived less effort with the use of the exoskeleton, are those mostly reported on the user's trunk (upper back, lower back, abdominal region, chest) and the hips and thighs.
Regarding discomfort, on average in all three workstations the perceived discomfort was low (workstation 1: \(\bar{X}\) = 2,2; workstation 2: \(\bar{X}\) = 1,7; workstation 3: \(\bar{X}\) = 2,0). In general, higher values of discomfort were perceived on the upper back, chest, hips, and thighs. The discomfort in these regions is caused by friction, pressure, and heat. Throughout the study, there was an increased discomfort on the three workstations on the upper back, chest, and shoulders. Meanwhile, for the thighs there was a decrease. Regions such as the lower back and hips were less coherent in the three workstations. In workstation 1, participants perceived a reduction of discomfort in the lower back while in workstation 3 an increase was perceived. Additionally, in workstation 1 a slight decrease in discomfort on the hips was perceived, while in workstations 2 and 3, an increase was perceived. In workstations 2 and 3, workers also reported the thoracic region and arms as discomfort regions caused by the exoskeleton. For certain tasks that involved trunk rotation, the rigid bars of the exoskeleton made pressure on the thoracic region of the participants which caused pain. Due to this, two workers who performed these tasks, reported this region as uncomfortable (2 and 6 on the 7-point Likert scale). The arms were also reported in workstation 2, since for some tasks workers make repetitive movements with the arms close to their bodies, which may limit their movements (classified as 2).
As shown in Table 1, in all three workstations the usability results were quite positive. In all the three workstations, more than 80% of participants agree that the exoskeleton is useful, has a good interface quality and that it is satisfactory. On one hand, in terms of the participants wanting to have access to the exoskeleton, the workers’ opinion was similar in the three workstations, tending to agree on the last day of use. Only in workstation 3, 8% of workers do not agree or disagree on this matter. In general, practically all participants would like to have access to the exoskeleton during their work. On the other hand, regarding the intention to use it, there is a bigger disagreement in the three samples. On the last day of use, we can verify that although there is a big percentage of participants who agree that they would use the exoskeleton, there is a small percentage that disagrees in workstation 1 (17%) and workstation 3 (8%). This happened because workers recognize that there are still some necessary improvements to the exoskeleton and that not all tasks or postures are suitable for its use.
Lastly, through the usability questionnaire it was possible to conclude about the ease of use in terms of donning and doffing of the exoskeleton and angle regulation mechanism. In Table 2 we can verify that the participants’ opinion regarding the donning and doffing of the equipment maintained and all agree that is easy to use. Considering the angle regulation mechanism, the results were positive although not coherent. Some reported that the angle established was hard to define and verify without external help, especially when wearing gloves.
Through the workers’ comments, it was possible to analyze the advantages and disadvantages of this equipment. Most complaints were due to heat, pressure, and limited range of motion, not practicable for all tasks and weight. Most of the advantages reported referred to the decreasing effort required for performing the tasks, the posture improvement and helping with manual material handling and bending forward.
Through the Wilcoxon signed-rank test, the difference between the results of the initial and final questionnaires were compared, however, none of the differences were considered significant. This might have happened due to the small number of usages of the exoskeleton per participant (between 1 and 7) and the reduced time of usage for each test (minimum of 15 min). Since it is expected that the participants’ opinion changes throughout the study, it is advised to implement a longer study with a longer time of usage per test.
4 Conclusions
In conclusion, the finding results show that although participants perceive the benefit of using the exoskeleton, there are still some aspects that need to be improved so there can be a better adaption to non-cyclic tasks. In fact, they intend to have access to the exoskeleton however they predict that it will not be used as often due to its limitations. Improvements should occur on the contact points with the user’s body due to heat, rigid bars should not limit motion and angle regulation mechanism should be more practicable. With that said, we can conclude that the exoskeleton is eligible for these workstations, but it works better during less dynamic tasks and mostly static positions. Once these changes are made, exoskeletons might become more adequate for these workplaces and their acceptance might increase.
References
Ferreira, G., Gaspar, J., Fujão, C., Nunes, I.L.: Piloting the use of an upper limb passive exoskeleton in automotive industry: assessing user acceptance and intention of use. In: Nunes, I.L. (ed.) AHFE 2020. AISC, vol. 1207, pp. 342–349. Springer, Cham (2020). https://doi.org/10.1007/978-3-030-51369-6_46
Iranzo, S., Piedrabuena, A., Iordanov, D., Martinez-Iranzo, U., Belda-Lois, J.-M.: Ergonomics assessment of passive upper-limb exoskeletons in an automotive assembly plant. Appl. Ergon. 87, 103120 (2020)
Nunes, I.L.: Knowledge acquisition for the development of an upper-body work-related musculoskeletal disorders analysis tool. Hum. Factors Ergon. Manuf. Serv. Ind. 17(2), 149–162 (2007)
Bosch, T., van Eck, J., Knitel, K., de Looze, M.: The effects of a passive exoskeleton on muscle activity, discomfort and endurance time in forward bending work. Appl. Ergon. 54, 212–217 (2016)
Baltrusch, S.J., van Dieën, J.H., Bruijn, S.M., Koopman, A.S., van Bennekom, C.A.M., Houdijk, H.: The effect of a passive trunk exoskeleton on metabolic costs during lifting and walking. Ergonomics 62, 903–916 (2019)
Amandels, S., Eyndt, H.O.H., Daenen, L., Hermans, V.: Introduction and testing of a passive exoskeleton in an industrial working environment. In: Bagnara, S., Tartaglia, R., Albolino, S., Alexander, T., Fujita, Y. (eds.) IEA 2018. AISC, vol. 820, pp. 387–392. Springer, Cham (2019). https://doi.org/10.1007/978-3-319-96083-8_51
de Vries, A., de Looze, M.: The effect of arm support exoskeletons in realistic work activities: a review study. J. Ergon. 9, 1–9 (2019)
Spada, S., Ghibaudo, L., Gilotta, S., Gastaldi, L., Cavatorta, M.P.: Investigation into the applicability of a passive upper-limb exoskeleton in automotive industry. Procedia Manuf. 11, 1255–1262 (2017)
Sauro, J., Lewis, J.R.: Quantifying the User Experience: Practical Statistics for User Research. Elsevier/Morgan Kaufmann, Amsterdam (2012)
Kothgassner, O.D., Felnhofer, A., Hauk, N., Kastenhofer, E., Gomm, J., Kryspin-Exner, I.: TUI: Technology Usage Inventory. ICARUS, Vienna (2013)
Hensel, R., Keil, M.: Exoskeletons as human-centered, ergonomic assistance systems in future competitive production systems. In: International Conference on Competitive Manufacturing (2019)
Acknowledgments
The author acknowledge Fundação para a Ciência e a Tecnologia (FCT - MCTES) for its financial support via the project UIDB/00667/2020 (UNIDEMI).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Flor, R., Gaspar, J., Fujão, C., Nunes, I.L. (2021). How Workers Perceive LAEVO Exoskeleton Use in Non-cyclic Tasks. In: Nunes, I.L. (eds) Advances in Human Factors and System Interactions. AHFE 2021. Lecture Notes in Networks and Systems, vol 265. Springer, Cham. https://doi.org/10.1007/978-3-030-79816-1_19
Download citation
DOI: https://doi.org/10.1007/978-3-030-79816-1_19
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-79815-4
Online ISBN: 978-3-030-79816-1
eBook Packages: EngineeringEngineering (R0)