
Abstract
Considerable research studies coupled with several deployment projects have been conducted recently to investigate potential effects of different cooperative automation technologies in controlling signalized junctions. The focus has been on how vehicles and infrastructure can cooperate toward safer and more efficient intersection operations. In this chapter, a brief review of some ongoing research projects as well as real world implementations that were presented during the Automated Vehicles Symposium (AVS) 2018 are discussed. The review includes the specifications of the projects and the challenges in implementation of the new technology. Three of the near future possible deployments are presented as well.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Traditional approaches to intersection management are less intelligent and the control decisions are made without awareness of the entire state of the traffic. Typically, intersections are operated in a coordinated manner with a number of signal timing plans that have been designed and allocated to accommodate different volumes, based on time-of-day and day-of-week traffic flow patterns. These timing plans are not updated very often due to the high cost of data collection and analysis. Although vehicle actuated signal controls are more efficient than fixed-timing signal operations, they are not inherently designed to optimize traffic users delay and/or fuel consumption in real time. Even in more advanced traffic management systems such as adaptive control, the lack of reliable traffic user detection systems causes inefficiencies. With advances in connected vehicle technologies and dedicated short range communication (DSRC), different traffic modes can communicate to each other. Through vehicle-to-X (V2X) communications, vehicles can exchange information with each other and with infrastructure. This environment provides higher traffic resolution data and will result in a well-informed decision making process. In this smarter inter-connected environment, safety, mobility, and environmental performance measures can be improved.
Recently, several research projects have been implemented in different U.S. cities to investigate the effects of connected and automated vehicle (CAV) technology in intersection control and management. Most of these projects were presented during the AVS 2018 conference, breakout session No. 13, “New innovations in intersection control with cooperative automation”. In the following sections, a brief review of completed, ongoing and potential future projects are presented. The outcomes, lessons learned as well as top challenges are discussed.
2 Completed Projects
2.1 Multi Modal Intelligent Traffic Signal System (MMITSS)
The Multi-Modal Intelligent Traffic Signal System (MMITSS) project is part of the Connected Vehicle Pooled Fund Study (CV PFS) entitled “Program to Support the Development and Deployment of Connected Vehicle System Applications.” The CV PFS was developed by a group of state and local transportation agencies and the Federal Highway Administration (FHWA). MMITSS consist of four major components: Intelligent Traffic Signal System (I-SIG), Transit and Truck Signal Priority (TSP), Real-time Performance Monitor (RTPM), and Mobile Accessible Pedestrian Signal System (PED-SIG).
This project is conducted by the University of Arizona (PI) and the PATH program at the University of California, Berkeley in two different testbeds. The requirements of the MMITSS system to be implemented in the California testbed are different than those for the Arizona Test Bed. The primary differences are in the hardware architecture, including traffic signal controllers used in each testbed, algorithms for signal priority and intelligent signal control. The California testbed utilizes the Caltrans Type 2070 controllers with AB3418 protocol over serial RS-232 communications. The Arizona testbed utilizes Econolite ASC/3 and Cobalt controllers with NTCIP (National Transportation Communications for ITS Protocol) over Ethernet communications. Each of these controllers provides different signal timing logic (control software) and requires different communications interfaces [1].
In terms of software design, although there are many common components, but the core software architecture and control algorithms are different. The Arizona testbed implemented adaptive signal control and the California testbed chose to enhance the existing coordinated-actuated signal control with a common cycle length. As a result, the algorithms implemented for intelligent signal control and signal priority are different for the two testbeds [2,3,4].
The field data analysis demonstrated that MMITSS applications effectively improved the travel time and reduced delay for the DSRC equipped vehicles. In particular, the signal priority component reduced delay of connected trucks by up to 20% and the I-SIG improved travel time reliability by up to 56%, compared to the base case. The simulation study found that I-SIG achieved vehicle delay reductions up to 35% and TSP effectively saved travel time for both transit and passenger vehicles on the corridor where TSP was operated; but occasionally increased the system-wide delay, due to reduced green times on the side streets [5]. The simulation study also showed that the signal priority component was effective in assigning priority to the equipped trucks and buses based on a pre-defined hierarchy of control [6]. The MMITSS system development is now in Phase III in which the goal is to make deployment readiness enhancements to the MMITSS prototypes that were developed and field tested in Phase II.
2.2 UDOT Implementation of MMITSS
From 2015, Utah DOT decided to initiate efforts to deploy (vehicle-to infrastructure) V2I systems. The goals of initial deployment included: (1) to gain hands-on experience with the procurement and installation of DSRC equipment; (2) to deploy an application that could yield a tangible benefit (to justify the cost of installation); and (3) to equip a corridor that could subsequently be used for the development, testing, and implementation of other connected vehicle applications, including those that will ultimately be installed in vehicles. In partnership with the Utah Transit Authority (UTA), UDOT decided to deploy the MMITSS signal priority application on transit vehicles. The objective was to improve the reliability of bus service while optimizing the use of available green time [7].
Roadside DSRC radios have been installed at 30 intersections in Salt Lake City, UT. When the buses are behind schedule, the system grants priority so they can get back on schedule. The project developed a schedule-checking module and built upon the MMITSS platform. Preliminary operational results showed that transit reliability on this corridor for bus route #217 has improved from 86% to 94% [7].
UDOT MMITSS deployment project is one of the first DSRC systems in regular operation in the United States. In addition, this project is one of the first completed projects that address the signal phase and timing (SPaT) challenge. The SPaT challenge is organized by the American Association of State Highway Transportation Officials (AASHTO), the Institute of Traffic Engineers (ITE), and ITS America (ITSA) through the Vehicle to Infrastructure Deployment Coalition (V2I DC) that have challenged state and local public sector transportation infrastructure owners and operators to work together to achieve deployment of roadside DSRC equipped units to broadcast SPaT in real-time at signalized intersections on at least one road corridor or street network (approximately 20 signalized intersections) in each of the 50 states by January 2020. The main mid-term goal of the SPaT Challenge is to deploy DSRC broadcasts of the SPaT messages, and the long-term objective is to sustain the operation of connected vehicle applications that utilize the SPaT messages [8].
3 Ongoing Projects
3.1 CV Pilots
To spur the early deployment of CV technology, in September 2015 the United States Department of Transportation (USDOT) awarded three (3) cooperative agreements to Wyoming Department of Transportation, New York City Department of Transportation (NYCDOT) and Tampa Hillsborough Expressway Authority (THEA). Two of the three sites, NYCDOT and THEA, are deploying CV technology to improve traffic signal progression along their respective corridors [9].
NYCDOT is deploying two applications that deal with interactions of CV and traffic signal systems. Pedestrian in Signalized Crosswalk application will use pedestrian detection technology to indicate the presence of a pedestrian in a crosswalk at a signalized intersection. Pedestrian’s presence will be detected by pedestrian detection equipment as a pedestrian passes through the crosswalk and notify the vehicles of a pedestrian’s presence. The MMITSS PED-SIG application is aimed at supporting visually impaired to cross the street. The application will be implemented on a portable mobile device communicating in both cellular and DSRC spectrum and able to request service at signalized intersections utilizing the PED actuation operation. For the intelligent traffic signal system NYCDOT is proposing to use CV data as an input to the existing Adaptive Control Decision Support System by augmenting data from the toll tag reader system that is used to provide travel time and speed information.
Tampa Hillsborough Expressway Authority (THEA) is deploying two applications developed under the auspices of MMITSS at various locations within the pilot deployment area. I-SIG is being deployed along two corridors to improve traffic progression and increase travel time reliability. TSP component of MMITSS is also being deployed along four routes used by Hillsborough Area Transit Authority.
3.2 Intelligent Real-Time Isolated Intersection Traffic Control System (IICS)
This study is led by University of Florida under several projects funded by National Science Foundation (NSF) and Florida Department of Transportation (FDOT). The research foundation of this project is to optimize traffic signal control and vehicle trajectories simultaneously at isolated intersections [10], in a mixed traffic and low demand condition, where AV, CV and conventional vehicles co-exist [11].
The algorithm takes arrival information of vehicles when they enter the communication range as the input and then calculates optimal vehicle trajectories for a given signal timing plan. All vehicles are supposed to accelerate to the maximum allowed speed and keep the saturation flow rate to utilize the green time to its maximum efficiency. The signal timing parameters are enumerated and the optimal signal timing is selected which minimizes the average travel time delay (ATTD). A rolling horizon scheme is applied to conduct the optimization over the time horizon for new approaching vehicles [10].
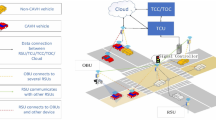
The proposed IICS system was implemented and tested at the Traffic Engineering and Research Laboratory (TERL), a FDOT closed-course facility. A total of six vehicles participated in the field demonstration, including four CVs (one AV with SAE level four and DSRC connectivity), and two conventional vehicles. The AV is a hybrid Toyota Highlander equipped with different types of sensors including GPS, IMU and Lidar sensors for localization and obstacle avoidance. The intersection is equipped with a Doppler-based radar sensor system to detect and classify all approaching vehicles, which provides arrival information for conventional vehicles. Econolite Cobalt controller is used to control the traffic signal. A NTCIP 1202 protocol application is developed to control the controller. Both CVs and the intersection have either Onboard Units (OBUs) or Roadside Unit (RSU) for transmitting and receiving DSRC messages. Results showed that the system was able to provide optimal trajectories to both CVs and AVs in a very short time, which reduced delays due to unnecessary stops. However, it was difficult for the CV drivers to follow the suggested trajectory closely. The root mean square errors (RMSE) between planned trajectories and actual trajectories range from 4.3 ft to 64.9 ft [12].
3.3 Traffic Optimization for Signalized Corridor (TOSCo) Project
The TOSCo project is sponsored by Federal Highway Administration (FHWA) and performed by the V2I Consortium of CAMP LLC, in conjunction with three university partners, including University of Michigan Transportation Research Institute (UMTRI), Texas A&M transportation research institute (TTI) and University of California at Riverside (UCR). This project aims at optimizing traffic flow and minimizing vehicle fuel consumptions and emissions at signalized arterial roadways. The system applies vehicle-to-vehicle (V2V) communications to form strings to reduce headways and vehicle-to-infrastructure (V2I) communications to estimate real-time queue length at intersections. An eco-trajectory planning algorithm is designed to smooth trajectory and reduce number of stops.
TOSCo equipped intersections are constantly broadcasting information about SPaT, MAP, and Roadside Safety Messages (RSM). The RSM includes predicted queue length and green window information, which provides a feasible time interval for TOSCo equipped vehicles to pass the intersection. When TOSCo-equipped vehicles are outside the communication range, the vehicles would operate in a free-flow mode. They would operate under either manual control, adaptive cruise control (ACC) or Cooperative Adaptive Cruise Control (CACC), depending on its position in the string and whether it is following another connected vehicle (CV). When a TOSCo-equipped vehicle enters the communication range of the intersection and receives SPaT, MAP and RSM, the vehicle would then plan a speed trajectory that allows it to either pass through the intersection without stopping (either by speeding up slightly, maintaining a constant speed, or slowing down slightly) or to stop in a smooth, coordinated fashion that would minimize the amount of time stopped at the intersection. TOSCo-equipped vehicles that have to stop at an intersection would perform a coordinated launch maneuver at the start of the signal phase that would allow them to clear the intersection in a more efficient manner, which greatly increases the intersection capacity. Planning the appropriate trajectory requires information from the infrastructure (i.e., SPaT and RSM). To provide accurate queue length and green window information, a set of infrastructure algorithms are developed, depending on different data collection and sensing technologies (e.g., CV trajectory data, loop-detector data and radar data).
A simulation platform that integrates a vehicle behavior module, an infrastructure component and a fuel and emission evaluation module is designed and implemented in VISSIM. A low speed corridor (Plymouth Rd, MI) and a high speed corridor (SH105, TX) are modeled in VISSIM and calibrated with real-world data. Different scenarios with varying TOSCo-equipped vehicle penetration rates are simulated. Simulation results demonstrated that TOSCo functions improve mobility in terms of total delay, stop delay, number stops, average speed and total travel time. Meanwhile, TOSCo functions also demonstrated smoother traffic flow especially at higher penetration rates, which has a significant positive impact on discharging queues and maintaining motion which improves fuel economy and reduce emissions.
4 Potential Future Projects
Beside the completed and ongoing projects, there are studies that have the potential for future development. In this section, selected projects are briefly introduced.
The queue spillback problem in freeway on-ramp meters that are adjacent to traffic signals is investigated by Kan et al. [13]. During peak hours, the traffic signals employ long signal cycles to maximize intersection capacity which results in long platoons of freeway-bound traffic advancing toward the on-ramp within a short period, which quickly fills up the on-ramp and causes spillback. Currently, the problem is addressed by suspending ramp metering or relaxing the metering rates that will inherently increase freeway delay. It was shown that V2I communication allows the traffic signals to adjust cycle length considering on-ramp queue length. Improved arterial signal timing reduces both arterial and freeway delay.
Honda demonstrated a smart intersection concept in Marysville, Ohio, that utilizes high-resolution cameras to track vehicles, pedestrians and cyclists’ trajectories in the vicinity of the intersection and generates proxy messages to provide warning messages to connected vehicles. Wireless communication systems, computer vision recognition systems, infrastructure control systems, and in-vehicle telematics and alert systems are all connected and coordinated [14]. This infrastructure based sensing and communication platform has great potentials in both traffic control and facilitating the automated driving system (ADS).
A decentralized energy-optimal control framework for signal-free urban intersection problem using CAV technology is addressed by Malikopoulos et al. [15] The goal of this analytical solution is to minimize the fuel consumption subject to a throughput maximization requirement. The study concluded that feasible solutions satisfying all safety constraints always exist. The effectiveness of the framework was illustrated through simulation. The results show CAVs can conserve momentum and fuel while their travel time can be improved by 20%.
5 Conclusion
In this chapter, a brief review of the completed and ongoing research projects that presented during the AVS 2018 are discussed. The review includes the specifications of the projects and the challenges of the new technology. In addition, a few interesting research efforts which may need to field implementation in the near future are also introduced.
Besides existing research and deployment projects, the following bullet points summarize the research needs from the community:
-
Trajectory-based signal control systems have a lot of potentials to be investigated.
-
With low CAV penetration rate, other data sources such as shared mobility companies data should be integrated.
-
Sharing algorithms source code and creating an open source community between researchers can be very helpful in speeding up the future development.
-
Pedestrians should not be left out in evaluation of advanced CAV intersection control systems.
-
There is a need for a generic simulation platform that can precisely replicate the CAV behaviors, V2X messaging, and interactions with human-driven vehicles.
-
The benefits of CAV technology on non-signalized intersections should also be studied.
-
It is necessary to rethink about intersection capacity analysis when CAV penetration rate increases.
References
University of Arizona, University of California PATH Program, Savari Networks, Inc., Econolite, MMITSS – Phase II: System Development, Deployment and Field Test – Final Report (2016). http://www.cts.virginia.edu/wp-content/uploads/2014/04/53-MMITSS-Phase-2-Final-Report-FINAL-092520161.pdf
Feng, Y., Head, K.L., Khoshmagham, S., Zamanipour, M.: A real-time adaptive signal control in a connected vehicle environment. Transp. Res. Part C: Emerg. Technol. 55, 460–473 (2015)
Zamanipour, M., Head, K.L., Feng, Y., Khoshmagham, S.: Efficient priority control model for multimodal traffic signals. Transp. Res. Rec.: J. Transp. Res. Board 2557, 86–99 (2016)
Beak, B., Zamanipour, M., Head, K.L., Leonard, B.: Peer-to-peer priority signal control strategy in a connected vehicle environment. Transp. Res. Rec.: J. Transp. Res. Board 2672, 15–26 (2018)
Ahn, K., Rakha, H.A., Kang, K., Vadakpat, G.: Multimodal intelligent traffic signal system simulation model development and assessment. Transp. Res. Rec.: J. Transp. Res. Board 2558, 92–102 (2016)
Zamanipour, M., Head, L., Ding, J.: Priority system for multimodal traffic signal control. In: Presented at the Transportation Research Board 93rd Annual Meeting (2014)
Leonard, B.: Strong signal; Utah breaks new ground with connected vehicles. https://www.roadsbridges.com/strong-signal
SPaT challenge overview (2018). https://transportationops.org/spatchallenge
Hartman, K.: Connected Vehicle Pilot Deployment Program. U.S. Department of Transportation (2018). https://its.dot.gov/pilots/
Li, Z., Elefteriadou, L., Ranka, S.: Signal control optimization for automated vehicles at isolated signalized intersections. Transp. Res. Part C: Emerg. Technol. 49, 1–18 (2014)
Pourmehrab, M., Elefteriadou, L., Ranka, S., Martin-Gasulla, M.: Optimizing signalized intersections performance under conventional and automated vehicles traffic. arXiv e-prints arXiv:1707.01748 (2017)
Omidvar, A., Pourmehrab, M., Emami, P., Kiriazes, R., Esposito, J.C., Letter, C., Elefteriadou, L., Crane III, C.D., Ranka, S.: Deployment and testing of optimized autonomous and connected vehicle trajectories at a closed-course signalized intersection. Transp. Res. Rec.: J. Transp. Res. Board 2672(19), 45–54 (2018)
Quain, J.R.: With cameras that know dogs from Dodges, Honda is making intersections safer, Digital Trends (2018). https://www.digitaltrends.com/cool-tech/honda-smart-intersection-marysville/
Kan, X., Lu, X., Skabardonis, A.: Increasing freeway capacity by efficiently timing its nearby arterial traffic signals. Transp. Res. Rec.: J. Transp. Res. Board 2672(18), 27–34 (2018)
Malikopoulos, A., Cassandras, C., Zhang, Y.A.: Decentralized energy-optimal control framework for connected automated vehicles at signal-free intersections, automatica. arXiv:1602.03786 (2017)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Zamanipour, M., Feng, Y., Vadakpat, G. (2019). New Advances in Intelligent Intersection Management with Connected and Automated Vehicle Technology. In: Meyer, G., Beiker, S. (eds) Road Vehicle Automation 6. AVS 2018. Lecture Notes in Mobility. Springer, Cham. https://doi.org/10.1007/978-3-030-22933-7_9
Download citation
DOI: https://doi.org/10.1007/978-3-030-22933-7_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-22932-0
Online ISBN: 978-3-030-22933-7
eBook Packages: EngineeringEngineering (R0)