
Abstract
Electrochemical machining (ECM) is a non-traditional method of machining, based on the anodic dissolution of the workpiece, which allows to obtain surfaces of a complex shape (turbine blades, dies and molds, etc.); to produce through and blind holes of different or variable cross-sections, including the curved axis; to remove a defective surface layer from the workpiece after electrical discharge machining or cutting (ECM without shaping) in order to ensure a specified surface roughness; to remove burrs and round sharp edges. Distinguishing features of electrochemical shaping include a narrow interelectrode gap, an electrolyte flow in the space between electrodes, a high localization of dissolution in a specified area of the workpiece, and a high dissolution rate. The efficiency of ECM depends significantly on the shape and size of the electrode-tool, as well as the trajectory and speed of its movement. This article is devoted to the investigation of the combination of kinematic and geometric ECM characteristics. It is shown that the reduction of interelectrode gap under traditional modes leads to a significant increase in the total current and the difficulties of ECM process control. The possibilities of local machining with point and linear electrode-tools are analyzed.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Electrochemical machining (ECM) and especially electrochemical micromachining have become more popular with recent advancements to fulfill the needs of the fabrication of macro- and microcomponents [1,2,3,4,5,6,7,8,9,10,11,12]. With rapid developments in the fields of automotive, aerospace, electronics, optics, medical devices, and much more, this process finds wide applications in the machining of titanium and titanium alloys, super alloys, and stainless steel structures which are difficult to machine by conventional machining processes. ECM provides advantages in the shaping of complex features with no thermal stress, burr formation, and tool wear and can be implemented on metals regardless of their hardness [13,14,15,16,17,18,19,20,21,22]. It is known from the theory of mechanical engineering technology that the following kinematic and geometric schemes of forming can be carried out:
-
Surface treatment (one-time shaping) (Fig. 1a);
Fig. 1 
Kinematic–geometric schemes of ECM: a ECM on the surface; b ECM along the line; c ECM at the point; (1) electrode-tool; (2) workpiece; Vx is velocity in the direction of the axis Ox; Vy is velocity in the direction of the axis Oy; Vz is velocity in the direction of the axis Oz
-
Processing on the line (Fig. 1b);
-
Processing at the point (Fig. 1c).

In most cases, ECM is used to perform copy-and-flash operations, that is, surface treatment (Fig. 1a). Thus, the most important advantage of the ECM is the possibility of forming over the entire surface to ensure high performance of the process. The required geometry of the resulting surface is provided by copying the geometric shape of the electrode-tool surface. In this case, there is a simple kinematics of the machine—rectilinear displacement of the electrode-tool along the z-axis as the anode dissolution of the workpiece material. However, in this case, there are difficulties in controlling the process of shaping and ensuring high accuracy. Increasing accuracy is provided in the transition to the minimum possible interelectrode gaps (IEG). The accuracy of machining is associated with the magnitude of the IEG:
where Δ is the local value of the machining error; k is the coefficient of proportionality; s is the local value of the interelectrode gap.
However, the decrease of the IEG is associated with a number of difficulties in the implementation of the ECM process:
-
Increasing the probability of short circuits, that is, reducing the reliability of the processing process;
-
Deterioration of electrolyte flow conditions in the IEG, which is associated with a significant increase of its hydraulic resistance;
-
Increasing the current density and the total current requires the use of very high power supply (150–400 kW).
This article is devoted to the investigation of the combination of kinematic and geometric ECM characteristics.
2 The Comparative Investigation of the Electrochemical Machining Schemes
The necessity of preserving a time of the properties of the interelectrode environment with a decrease of the IEG led to the need to move from a continuous process to a discrete or pulse-loop process [5]. In this regard, were developed:
-
scheme of treatment with vibrating electrode-tool (Fig. 2c);
Fig. 2 
Timeline of various ECM schemes: a loop processing; b pulse-loop processing (a scheme with inlet/outlet of the electrode-tool during the supply voltage pulses); c scheme of ECM with vibrating electrode-tool; T is the duration of the voltage pulse during loop ECM (15–35 s); tP is the duration in pulse-loop; s0 is the interelectrode gap; U is the voltage technology; J is the current in the electrode gap; y is the displacement of the electrode-tool
-
loop processing (loop duration is 15–35 s) (Fig. 2a);
-
pulse-loop processing (Fig. 2b).

Despite the transition to processing at small IEG, loop and pulse-loop schemes are characterized by a decrease in performance:
where k1 is the duty ratio of the voltage pulses; k2 is the duty ratio of the voltage packages; k3 is the current pulse shape coefficient; j is the current density.
Practical application of pulse-loop processing modes showed that k1 and k2 vary in the ranges: k1 = 0.2–0.5; k2 = 0.3–0.6; k3 = 0.7. Thus, there is a decrease in productivity by 6–22 times in comparison with the continuous process of ECM. Then the rate of anodic dissolution at s0 = 50 µm, j = 200 A/cm2, Vap = 0.3–0.4 mm/min.
Further reduction of the IEG becomes impossible due to the decrease in the reliability of the ECM process (a significant increase in the probability of short circuits, deterioration of the conditions for washing the interelectrode gap).
Therefore, further improvement of the ECM is associated with the justification of the process conditions of processing with non-profiled electrode-tools in the local areas of the treated surface (line processing (Fig. 1b) or at a point (Fig. 1c).
It is possible to significantly reduce the interelectrode gap to s = 1.0–20 μm by the significant improvement in the conditions of the evacuation of the anode dissolution products from the interelectrode gap. In this case, the current density up to 100 A/mm2 will be reached.
Thus, even with the preservation of interelectrode gaps similar to the pulse-loop processing without loss of productivity, the ratio of the treated area to the end area of the electrode-tool is possible as:
where Sw is the area of the treated surface; SET is the working area of the electrode-tool.
This ratio can be achieved without loss of performance values 15–55 by reducing of the interelectrode gap to the minimum values (1.0–20 µm).
A high-frequency pulse voltage with a voltage pulse frequency of up to 20 MHz is recommended for local shaping.
The most important task of designing the operations of the ECM by unprofiled tool is to select the type and size of the local electrode-tool and the conditions of its displacement. This takes into account:
-
dimensions and geometric parameters of the treated surface (processing area, radii, minimum dimensions of the geometric elements of the treated surface, the angles of inclination of the processed elements)
-
the expected path of the electrode-tool;
-
requirements for accuracy and surface quality.
The most used and proposed electrode-tool types by the authors are given in Table 1.
The displacements of the local electrode-tool are selected depending on the shape of the treated surface:
-
path by surface (Fig. 3a);
Fig. 3 
Displacement path of the local electrode-tool: a path scheme; b scanning scheme; c one-time or layer-by-layer removal of the allowance; d matrix removal of the allowance
-
surface scanning (Fig. 3b);
-
layer-by-layer removal of allowance (Fig. 3c);
-
matrix removal of allowance (Fig. 3d).

Local electrode-tools have limited dimensions which imply restrictions on the limit value of the total current flow through the electrode. Since the total current is determined depending on the area of the working part of the local electrode, depending on the processing conditions, the choice of the interelectrode gap and the permissible current densities can be made (Fig. 4).

Dependence of current density on the IEG value: I is unacceptable area of the current densities; II is area of acceptable current densities
The choice of the velocity of the electrode-tool displacement is poorly justified at present. It is known [13, 14, 17, 18, 21] that velocity of the electrode-tool displacement ranges from 0.05 to 8 µm/min in the micromachining. The velocity of the local electrode ranges from 50 to 700 mm/min in the machining of cavities with large dimensions (of order of a few millimeters).
3 Experimental Study and Discussion
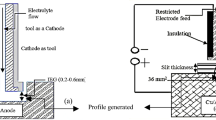
The experimental study of the processing of the annular electrode-tool was made (Fig. 5a). The resulting surface is shown in Fig. 5b.

Electrode-tool and the resulting surface: a photograph of the end part of the electrode-tool; b photograph of the resulting cavity
The electrode-tool was made of brass brand LA77–2 GOST 17711-80 with a diameter of 6 mm with a wall thickness of 0.5 mm, in a sample of steel grade X12N10T. ECM modes: The amplitude of the pulse voltage was 12 V; pulse duration was 1 µs; pulse repetition rate was 250 kHz; working fluid was 10% aqueous solution of NaNO3; the displacement velocity of the tool was 700 mm/min.
4 Conclusion
The investigation of the kinematic and geometric characteristics technological ECM schemes is carried out. It is established that with the development of the method of ECM, there is a tendency of developing processing schemes by unprofiled (local) electrode-tool. The rational path of the non-profiled electrode-tool displacement is offered depending on geometrical parameters of the processed surface. The possible technological equipment and modes of machining by point or linear electrode-tool are analyzed.
References
El-Hofy HAG (2005) Advanced machining processes: nontraditional and hybrid machining processes. McGraw Hill, New York
Kibra G, Bhattacharyya B, Davim JP (eds) (2017) Non-traditional micromachining processes: fundamentals and applications. Springer, Berlin
Rathod V, Doloi B, Bhattacharyya B (2017) Electrochemical Micromachining (EMM): Fundamentals and Applications. Non-traditional Micromachining Processes. Springer, Cham, pp 275–335
Skoczypiec S (2018) Electrochemical methods of micropart’s manufacturing. Micro and precision manufacturing. Springer, Cham, pp 21–40
Davydov AD, Volgin VM, Lyubimov VV (2004) Electrochemical machining of metals: fundamentals of electrochemical shaping. Russ J Electrochem 40(12):1230–1265
Rajurkar KP, Sundaram MM, Malshe AP (2013) Review of electrochemical and electrodischarge machining. Procedia CIRP 6:13–26
Spieser A, Ivanov A (2013) Recent developments and research challenges in electrochemical micromachining (µECM). Int J Adv Manuf Tech 69(1–4):563–581
Raja K, Ravikumar R (2016) A review on electrochemical machining processes. Int J Appl Eng Res 11(4):2354–2355
Davydov AD, Kabanova TB, Volgin VM (2017) Electrochemical machining of titanium. Review. Russ J Electrochem 53(9):941–965
Zhan D, Han L, Zhang J et al (2017) Electrochemical micro/nano-machining: principles and practices. Chem Soc Rev 46(5):1526–1544
Saxena KK, Qian J, Reynaerts D (2018) A review on process capabilities of electrochemical micromachining and its hybrid variants. Int J Mach Tool Manu 127:28–56
Leese R, Ivanov A (2018) Electrochemical micromachining: review of factors affecting the process applicability in micro-manufacturing. P I Mech Eng B-J Eng 232(2):195–207
Zhang Z, Zhu D, Qu N et al (2007) Theoretical and experimental investigation on electrochemical micromachining. Microsyst Technol 13:607–612
Mithu MAH, Fantoni G, Ciamhi J (2011) The effect of high frequency and duty cycle in electrochemical microdrilling. Int J Adv Manuf Technol 55:921–933
Volgin VM, Kabanova TB, Davydov AD (2015) Modeling of through-mask electrochemical micromachining. J Appl Electrochem 45(7):679–688
Xiaolong F, Pengfei Z, Yongbin Z et al (2016) Enhancement of performance of wire electrochemical micromachining using a rotary helical electrode. J Mater Process Tech 227:129–137
Ghoshal B, Bhattacharyya B (2016) Electrochemical micromachining of microchannel using optimum scan feed rate. J Manuf Process 23:258–268
Lyubimov V, Volgin V, Gnidina I et al (2016) The scanning dimensional microelectrochemical machining with the ultra-small interelectrode gap. Procedia CIRP 55:89–94
Volgin VM, Lyubimov VV, Davydov AD (2016) Modeling and numerical simulation of electrochemical micromachining. Chem Eng Sci 140:252–260
Chen W, Han F, Wang J (2018) Influence of pulse waveform on machining accuracy in electrochemical machining. Int J Adv Manuf Tech 96(1–4):1367–1375
Guo C, Qian J, Reynaerts D (2018) Deterministic removal strategy for machine vision assisted scanning micro electrochemical flow cell. J Manuf Process 34:167–178
Wang Y, Zeng Y, Zhang W (2019) Improving the machining efficiency of electrochemical micromachining with oscillating workpiece. Int J Adv Manuf Tech https://doi.org/10.1007/s00170-019-03379-w
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Lyubimov, V.V., Volgin, V.M., Krasilnikov, V.P. (2020). Investigation of Kinematic–Geometric Characteristics of Electrochemical Machining. In: Radionov, A., Kravchenko, O., Guzeev, V., Rozhdestvenskiy, Y. (eds) Proceedings of the 5th International Conference on Industrial Engineering (ICIE 2019). ICIE 2019. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-030-22063-1_42
Download citation
DOI: https://doi.org/10.1007/978-3-030-22063-1_42
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-22062-4
Online ISBN: 978-3-030-22063-1
eBook Packages: EngineeringEngineering (R0)