
Abstract
In a domain Ω, having boundary Γ, containing permanent magnets, i.e. aggregates of magnetic dipoles or, from now on, steady electric current distributed with density \(\overline{J}\) (A m−2), a magnetostatic field is set up; it is defined by field strength \(\overline{H}\) (A m−1) as well as flux density \(\overline{B}\) (Wb m−2 = T).
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

4.1 Constitutive Law of Magnetic Material
In a domain Ω, having boundary Γ, containing permanent magnets, i.e. aggregates of magnetic dipoles or, from now on, steady electric current distributed with density \(\overline{J}\) (A m−2), a magnetostatic field is set up; it is defined by field strength \(\overline{H}\) (A m−1) as well as flux density \(\overline{B}\) (Wb m−2 = T). In general, the link between \(\overline{H}\) and \(\overline{B}\), i.e. the constitutive law of the medium, is complicated. Neglecting hysteresis, the law is single-valued and can be expressed, for an isotropic medium in the absence of permanent magnetization, by
where μ is called permeability (H m−1) and, in the most general case, is a function of \(\overline{\left| H \right|}\); the inverse of μ is called reluctivity ν. The observer is supposed to be at rest with respect to the field [4].
4.2 Maxwell’s Equations of Magnetostatic Field
The equations governing the magnetic field are in Ω
and along Γ
if Γ is a flux line (flux lines parallel to Γ), or
if current of surface density \(\overline{J}_{S}\) (A m−1) is present, or
if flux lines are perpendicular to Γ.
For an isotropic and linear medium, in terms of \(\overline{B}\), the equations become in Ω
with
or
or
The equations written above unambiguously define the magnetostatic field which, because of (4.5), is solenoidal [4].
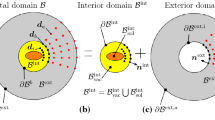
A general field domain is shown in Fig. 4.1.

Magnetic field domain with field-based boundary conditions
If both \(\overline{J}_{S}\) and \(\overline{J}\) are given, then it must be
i.e. the total current sums up to zero: therefore, densities JS and J cannot be independent.
In a non-homogeneous domain at the interface between two materials of permeability μ1 and μ2, from (4.2) it holds
so that the normal component of \(\overline{B}\) is always continuous (Fig. 4.2).

Line current
If there is a current of density \(\overline{J}_{S}\) (A m−1), then from (4.3) it follows
If \(\overline{J}_{s} = 0\) the tangential component of \(\overline{H}\) is continuous. Equations (4.12) and (4.13) are called transmission conditions.
In the case of a non-homogeneous medium, the following remark can be put forward. After (4.1) and (4.2), considering vector identity (A.14), one has
In the case of a non-homogeneous medium, field \(\overline{H}\) is solenoidal if \(\overline{\nabla } \mu\) and \(\overline{H}\) are orthogonal vectors; this means that lines separating layers of different μ are parallel to field lines of \(\overline{H}\).
Conversely, after (4.1) and (4.3), considering vector identity (A.16), it turns out to be
It appears that, in a current-free medium (i.e. J = 0), field \(\overline{B}\) is irrotational if \(\overline{\nabla } \mu^{ - 1}\) and \(\overline{B}\) are parallel vectors; this means that lines separating layers of different μ are orthogonal to field lines of \(\overline{B}\). If \(\overline{\nabla } \mu^{ - 1} = 0\) and J = 0 (homogeneous current-free medium), then \(\overline{B}\) is always irrotational.
Finally, an extension of constitutive law (4.1) is considered.
In the presence of a permanent magnetization \(\overline{B}_{0}\) in the magnetic material (permanent magnet) the constitutive law is
In this case the field equations are
In particular, the field inside a permanent magnet is described by (4.18) with \(\overline{J} = 0\); it follows that the magnet can be modelled by an equivalent distribution of current given by \(\overline{J}_{eq} = \mu^{ - 1} \overline{\nabla } \times \overline{B}_{0}\).
4.3 From Field to Potentials
-
(i)
From (4.2), since, for any vector \(\overline{A} ,\overline{\nabla } \,\cdot \,\left( {\overline{\nabla } \times \overline{A} } \right) = 0\) holds (see A.8), it is possible to define a vector function \(\overline{A}\) (Wb m−1) called vector potential by means of
and
This way (4.2) is fulfilled, while (4.3) becomes
For a homogeneous domain, after (A.12) and (4.20) it turns out to be
This is the (Poisson’s) vector equation governing \(\overline{A}\). In a system of rectangular coordinates it corresponds to the following three scalar equations
In general, the gradient of an harmonic function η may be added to \(\overline{A}\), having all the equations fulfilled. Suitable boundary conditions on Γ must be added in order to define the field in a unique way.
In particular, after (4.18) and (4.22), the potential inside a permanent magnet is given by \(\overline{\nabla }^{2} \overline{A} = - \overline{\nabla } \times \overline{B}_{0}\).
-
(ii)
In a two-dimensional domain, vectors \(\overline{J}\) and so \(\overline{A}\) have only one non-zero component; hence, vector potential can be treated as a scalar quantity.
Boundary conditions (4.8) and (4.10), in terms of \(\overline{B} = \left( {B_{x} ,B_{y} } \right)\) along the boundary Γ with normal unit vector \(\overline{n} = \left( {n_{x} ,n_{y} } \right)\) and tangential unit vector \(\overline{t} = \left( {t_{x} ,t_{y} } \right) = \left( {n_{y} , - n_{x} } \right)\), become, in terms of A,
i.e. A = const along Γ and
i.e. \(\frac{\partial A}{\partial n} = 0\) along Γ, respectively.
-
(iii)
If \(\overline{J} = 0\) in Ω and Ω is simply connected, then, along with \(\overline{A}\), the field \(\overline{H}\) can be described by a scalar function \(\varphi\) (total scalar potential, A) defined as
In fact, (4.3) is automatically satisfied, while from (4.2) we obtain
The latter is the Laplace’s equation governing total scalar potential \(\varphi\) with suitable boundary conditions.
The condition of simply connected domain can be obtained by suitable cuts, if necessary. If this condition is not fulfilled, nevertheless \(\varphi\) can be still defined, apart from multiples of a constant.
-
(iv)
In a three-dimensional domain, following the \(\overline{T} - \varOmega\) method, in regions free of impressed current (J0 = 0) an electric vector potential \(\overline{T}\) (A m−1) can be defined as
Comparing (4.28) and (4.3) it turns out that \(\overline{H}\) and \(\overline{T}\), which have the same curl, must differ by the gradient of a function Ω (dual scalar potential, A)
This way, the electric and magnetic vectors, \(\overline{J}\) and \(\overline{H}\), have been reformulated in terms of two potentials.
In order to define \(\overline{T}\) uniquely, a gauge must be introduced.
The equations governing electric and magnetic field can be now expressed in terms of \(\overline{T}\) and Ω. In fact, from (4.3) taking the curl of both members and taking into account (4.2) and (4.29), one has
and from (4.2)
In regions where σ = 0 one has \(\overline{J} = 0\) and therefore, from (4.2), \(\overline{\nabla } \times \overline{T} = 0\).
Moreover, imposing the gauge \(\overline{\nabla } \cdot \overline{T} = \mu \sigma \frac{\partial \varOmega }{\partial t}\;\overline{\nabla } \cdot \overline{T} = 0\), from (4.30) and (4.31) one obtains two independent equations for T and Ω, namely
and
subject to appropriate boundary conditions. They are
or
if the boundary is normal to a flux line (i.e. \(\overline{n} \times \overline{B} = 0\)) or it is parallel to a flux line (i.e. \(\overline{n} \cdot \overline{B} = 0\)), respectively.
After determining \(\overline{T}\), Ω is given by
with Ω0 to be determined.
The following remark can be put forward.
In the two-dimensional case, the magnetic vector potential has only one non-zero component, and this makes the computational cost low. In contrast, if a formulation based on magnetic vector potential is used for a three-dimensional problem, all three vector components are unknown; therefore, the computational cost is high. The \(\overline{T}\)-Ω formulation is a good compromise: in fact, the use of vector potential \(\overline{T}\) in current-carrying conductors makes it possible an accurate modeling of current distribution, while the use of scalar potential Ω elsewhere leads to economy in computation. Suitable conditions are needed at the boundary between conducting and non-conducting materials.
-
(v)
When in (4.1) permeability μ depends on \(\left| {\overline{H} } \right|\), one has \(\left| {\overline{B} } \right| = \mu \left( {\left| {\overline{H} } \right|} \right)\left| {\overline{H} } \right|\) and for the solution of (4.22) one should resort to an iterative procedure. According e.g. to the Newton-Raphson method, the residual r(A) of the governing Eq. (4.22) is developed in Taylor’s series, truncating the development at the first order
If an estimate of solution Ak−1 at the (k − 1)-th iteration is available, the subsequent prediction Ak at the k-th iteration is given by (4.28) after imposing r(Ak) = 0. It turns out to be
Then, μ and so \(\left| {\overline{H} } \right|\) are updated by means of the new estimate of A, and the problem is solved again. The procedure stops when the error between two successive solutions is less than the prescribed threshold. It is necessary to know an initial prediction A0 and the value of the derivative \(\frac{dr}{dA}\) at each iteration.
4.3.1 Field of a Line Current in a Three-Dimensional Domain: Differential Approach
A current I(A), concentrated at r = 0 and directed along the z axis in a system of cylindrical coordinates (r, φ, z), is considered (Fig. 4.2) [1].
The symmetry implies \(\overline{H} = \left( {0,H,0} \right)\) and from (4.3) the field equation is
where H vanishes as r approaches infinity. The general solution is
The Dirac’s δ in a cylindrical geometry can be approximated by
with \(\delta_{\alpha } = \frac{1}{{\pi \alpha^{2} }},\quad r \le \alpha\) and δα = 0 elsewhere. Consequently, the field H can be approximated as
For \(r \le \alpha\) it turns out to be
Since δα is a regular function near the origin, also Hn will be regular near zero; therefore kα= 0.
For \(r \ge \alpha\) it turns out to be
The Biot-Savart’s law follows
Alternatively, the Stokes’s theorem can be applied to (4.3), giving \(\oint_{l} {\overline{H} \cdot \overline{t} d\ell } = I\), if \(\ell\) is a closed line linking the conductor once. Considering the field geometry, \(\ell\) can be taken as a circular line centred at r = 0; therefore, (4.41) follows.
From (4.41) and (4.19) the vector potential is
4.4 Magnetostatic Energy
Given a magnetostatic field characterized by strength \(\overline{H}\) and flux density \(\overline{B}\) in a linear medium, the specific energy (J m−3) of the field is defined as \(\frac{1}{2}\overline{H} \cdot \overline{B}\); if the medium is isotropic, the energy W(J) stored in an unbounded region Ω is given by
If the constitutive relationship of the magnetic material is non-linear, the specific energy is \(\int_{0}^{B} {H\,dB^{{\prime }} }\) and the total energy is
In some cases it is convenient to introduce the specific co-energy \(\int\limits_{0}^{H} {B\,dH^{{\prime }} }\) and the total co-energy is
In the case of linear medium W = W′ holds.
In the linear case, taking into account the following identity (see A.13)
and (4.3), the total energy stored in a region Ω of boundary Γ is
The equation above reduces to \(W = \frac{1}{2}\int_{\varOmega } {\overline{A} \cdot \overline{J} \,d\varOmega }\) if either \(\overline{A} \times \overline{n} = 0\) or \(\overline{H} \times \overline{n} = 0\) along Γ [3].
4.5 Forces and Torques in the Magnetostatic Field
4.5.1 Principle of Virtual Work
Given a structure in the field region, on which force \(\overline{F}\) is to be computed, a virtual linear displacement ds in the direction of \(\overline{F}\), supposing that the magnetic system is supplied by a constant current I creating a linkage flux Φ, the sum of mechanical work Fds and variation of magnetic energy dW is equal to the input energy IdΦ so that the following balance equation
In the case of an angular displacement \(d\vartheta\), the torque M with respect to the rotation axis is
The quantity IΦ-W, denoted by W′, is the complementary energy or co-energy of the system.
On the other hand, if the magnetic system is isolated, mechanical work Fds and variation of magnetic energy dW take place so that
Therefore, the force can be evaluated as
while the torque is
If the system is linear, W′ and W coincide.
4.5.2 Lorentz’s Method
It is based on the definition of flux density; in the empty space, the force \(\overline{F}\) exerted on current I carried by a linear conductor of length \(\ell\) is \(\overline{F} = I\overline{\ell } \times \overline{B}\) where \(\overline{B}\) is the external field, i.e. the flux density in the absence of current. In general, the force \(\overline{F}\) exerted on current distributed with density \(\overline{J}\) in the region Ω is
Direction of force is orthogonal to the plane defined by flux density and current density vectors.
4.5.3 Method of Maxwell’s Stress Tensor
Defined a closed surface Γ enclosing the structure, then force \(\overline{F}\) is evaluated as
where \(\bar{n}\) is the outward normal unit vector.
The Maxwell’s magnetic stress tensors \(\overline{\overline{T}}\), assuming a system of rectangular coordinates, in a three-dimensional domain can be represented in matrix form as
In order the tensor be uniquely defined, surface Γ should not be coincident with the interface between materials having different permeability [2].
4.5.4 Link Between Lorentz’s and Maxwell’s Approach
There is a link between Lorentz’s and Maxwell’s approach to force calculation. In fact, using (4.1), (4.3) and (4.57), the force density \(\overline{f} \left( {{\text{Nm}}^{ - 3} } \right)\) is
In particular, the x-directed component is
After adding and subtracting the term \(\frac{\nu }{2}\frac{{\partial B_{x}^{2} }}{\partial x}\) it follows
It turns out to be
Due to (4.2) the last term of (4.64) is zero; then, if vector
is defined, fx can be viewed as its divergence, apart from a constant k which can be set to zero, namely
A similar result holds for force density components fy and fz; it follows
such that
and
such that
respectively. Therefore, according to (4.58), the force \(\overline{F} {(N)}\) can be computed as the flux, leaving surface Γ, of tensor \(\overline{\overline{T}}\) represented by matrix (4.59), in which the row entries are the components of vectors \(\overline{v}_{k} ,\quad k = 1,3.\)
Correspondingly, the torque is given by \(\overline{M} = \int_{\varGamma } {\overline{r}_{PO} \times \overline{\overline{T}} \cdot \bar{n}\,d\varGamma }\) where \(\overline{r}_{PO}\) is the position vector of point P on Γ with respect to the rotation axis in O.
It can be remarked that a solenoidal vector \(\overline{w}\) may be added to (4.65), (4.67) and (4.69) leaving force density components (4.66), (4.68) and (4.70) fulfilled. This means that stress tensor (4.59) is not uniquely defined.
As far as a comparison of methods is concerned, the following remark can be put forward. In order Lorentz’s method to apply, a current density must be defined in Ω; in contrast, virtual work principle (VWP) and Maxwell’s stress tensor method (MST) are more general. VWP is computationally more expensive, because the derivative of energy or co-energy is approximated by means of a finite difference, involving two displaced positions of the structure. Therefore, two field analyses are necessary to compute force or torque at a given position. MST require only one field analysis.
4.6 Worked Example
4.6.1 Force on an Electromagnet
Let an electromagnet with a movable plunger be considered (Fig. 4.3), [1].

Model of the electromagnet
The iron core is supposed to have infinite permeability. The air gaps in the x direction are supposed to be much smaller than the air gap t in the y direction.
The circulation of the magnetic field H, along a line linking the excitation current NI and crossing the air gap t in the normal direction, reduces to
Therefore at the air gap
while in the iron part H = 0. Following (4.49), the co-energy stored in the air gap is given by
where S is the cross-section of the central limb and μ0 is the air permeability.
If NI is constant, according to (4.52), the force acting on the movable part is
The force is negative, i.e. opposite to the direction of increasing t; therefore, it is attractive, regardless of the sign of I.
In order to apply the method of Maxwell’s stress tensor, an integration surface Γ enclosing the movable part is considered having \(\overline{n}\) as its outward normal unit vector.
Taking into account the field distribution, it follows
Therefore it turns out to be
The force is attractive, because variables t and y are oriented in opposite directions.
References
Di Barba P, Savini A, Wiak S (2008) Field models in electricity and magnetism. Springer, Berlin, Germany
Hammond P (1971) Applied electromagnetism. Pergamon
Silvester PP (1968) Modern electromagnetic fields. Prentice-Hall
Simonyi K (1963) Foundations of electrical engineering: fields, networks, waves. Pergamon
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Di Barba, P., Wiak, S. (2020). Engineering Magnetostatics and Boundary-Value Problems. In: MEMS: Field Models and Optimal Design. Lecture Notes in Electrical Engineering, vol 573 . Springer, Cham. https://doi.org/10.1007/978-3-030-21496-8_4
Download citation
DOI: https://doi.org/10.1007/978-3-030-21496-8_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-21495-1
Online ISBN: 978-3-030-21496-8
eBook Packages: EngineeringEngineering (R0)