
Abstract
A Lunge is the basis of most attacking motions in fencing. Several studies have tried to determine biomechanical parameters that are determinants for a good lunge performance by comparing the kinematics of lunge gesture in novice versus experienced fencers. The purpose of this study was to 1 - understand if there are biomechanical parameters common to a group of experienced athletes that are determinant for a good lunge performance and 2 - build a 3D platform to facilitate the visualization and interaction between biomechanical information and coaches. Five skilled épée fencing athletes had their marker trajectories captured with an OptiTrack digital motion system (Prime 13) using eighteen cameras. The subjects executed the lunge 5–6 times while the coach qualitatively evaluated their performance. The two best (BR) and the two worst (WR) rated trials of each athlete, according to coach criteria, were used in our analysis. Wilcoxon test showed no significant differences in any of the selected variables when comparing the BR and WR trials. Our results also indicated that the body position at front-foot heel contact can possibly be a particularly important determinant to lunge performance and that the 3D platform can help the coach visualize and understand this phase.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Fencing is a result of speed and accuracy derived from a good skill, and this can be well evaluated with Biomechanics. A well defined movement pattern can be responsible for the athlete to reach the target faster and with less need of power. Lunge is the basis of most attacking motions in fencing and thus a well-executed gesture can be determinant to attack success. Several studies have tried to determine biomechanical parameters that are determinants for a good lunge performance by comparing the kinematics of lunge gesture in novice versus experienced fencers.
Using this approach [1] analyzed several factors that can influence lunge performance and observed that one of them was the center of mass (CM) potential energy, which decreases monotonically in the more skilled athletes, suggesting a link between coordination and skill. In a lunge, good coordination between the velocity changes that happen in the lower limbs motion, specially in the front leg, is essential to ensure an efficient conversion of potential into kinetic energy. Not surprisingly, it has been shown to affect the lunge and the weapon velocity and discriminate between novice and experienced fencers [2], to be an important element for the lunge performance.
There is a common belief described by [3] that during a lunge performance the weapon arm should move ahead of the body center of mass, nevertheless [2, 4] described that both movements can happen simultaneously.
In relation to predictors of the lunge motion [5] identified that knee range of motion, and peak hip flexion of the trailing leg and peak hip flexion of the leading leg were significant predictors of sword velocity and [6] found a significant correlation between lunge velocity and time to peak angular velocity of the trailing knee and leading elbow.
The authors in general are worried about the generation of the velocity and a few numbers of papers are found related to the kinematics chain, studying how the velocity is transferred. [7] described, using electromyography and kinematics data, that the trailing leg extensor muscles activate following a temporal pattern with the plantar flexors in the ankle firing subsequently. [8] found that expert fencing athletes demonstrated a sequential pattern from proximal to distal sequence in the trailing leg which was not as evident in the novices. Our group [9] showed the importance of the unarmed arm, as an auxiliary to the sword velocity and for the body stability.
In the present study, we ought to explore further the biomechanical factors that can affect the proper achievement of this sportive gesture in order to understand if there are biomechanical parameters common to a group of experienced athletes that are determinant for a good lunge performance.
Differently from previous studies, our approach took, primarily, into account the judgment of the individual performance established by an experienced coach. It is interesting to appoint that there is a big gap between scientific knowledge and coaches. Which take place all over the world. There is much knowledge being developed in labs however it never reaches the coaches. The languages are very different. The coach usually does not understand the graphics and data that the biomechanic researchers generate and the coaches need something that they can really use in their daily practice.
We intend to work in this gap, trying to fill the coaches’ needs but bringing the precision and reliable data that we can provide. The use of an interactive system is interesting and can fill this gap communication between coaches’ and researchers. The Ergonomic Laboratory researchers of the National Institute of Technology [10] have been working on this approach in other projects that involve combat sports such as Jiu-jitu and also in ergonomic study applied to the education and training of caregivers.
The purpose of this research is to understand if there are biomechanical parameters common to a group of experienced athletes that are determinant for a good lunge performance in accordance to a coach criteria and build a 3D digital platform to facilitate the visualization and interaction between biomechanical information and coaches.
2 Methods
We evaluated 5 skilled épée fencing athletes (3 female and 2 male, 20.8 ± 3.27 years, 1.76 ± 0.08 meters and 70.32 ± 10.56 kg), four of them (2 male and 2 female) were part of the Brazilian Olympic Team in 2016. After a warm-up period, each subject was instructed to perform a lunge attack from a static en garde position, at their best, while being observed by one experienced fence coach, also part of the Olympic Team.
2.1 Motion Capture and Kinematic Analysis
Three-dimensional coordinates of 39 retro-reflective markers, fixed on the lower and upper limbs, pelvis, trunk and head, were used to reconstruct whole body movements. (Figure 1).

Athletics with reflective marks.
Markers trajectories were captured with an OptiTrack digital motion system (Prime 13) using eighteen cameras (sampling rate: 240 Hz). The subject executed the task 5–6 times while the coach qualitatively evaluated their performance (balance and posture during lunges) according to his own criteria and corrected the gesture if necessary. Motive software (OptiTrack, version 1.8 and 1.10) was used for motion capture, reconstruction and preliminary data processing (namely, fill trajectory gap through cubic spline interpolation, in case of marker occlusion).
Data from the best-rated (BR) lunge attack of each athlete, as judged by the coach, was selected for inclusion in the 3D interactive environment, as this platform has the purpose to help in fencing trainings. Body pose during the lunge attack period was, thus, exported, for animation purposes using Biovision Hierarchy format (bvh).
Quantitative data of the following variables were made available to the coach through plots of their respective temporal series: angle relative to the anterior-posterior direction (toe in-out angle); the angle between the longitudinal axis of both feet; base length and width; horizontal position of the center of mass (CM) relative to the unarmed (back) heel; each segment, as well as the whole body, CM displacement and velocity in the forward, vertical and lateral directions; the 3D angular displacements and velocities of the upper and lower limb joints for both, armed and unarmed, sides; pelvis and trunk angular motion in the sagittal plane (Fig. 2).

Lunge motion captured using Optitrack system [9].
We also compared the kinematics of the best and worst-rated (WR) trials in order to explore further the biomechanical factors that can affect the proper accomplishment of the lunge gesture and to identify biomechanical parameters common to a group of experienced athletes that are determinant for a good lunge performance. Differently from previous studies, this approach took, primarily, into account the judgment of the individual performances established by an experienced coach.
At this step, the two best and the two worst rated trials of each athlete according to the coach criteria were used in our analysis. Calibrated Anatomical System Technique [11] was used to calculate the body segments instantaneous position and orientation. The 3D joint rotations (joint angles) were computed via Euler angles using the Cardan sequence (flexion-extension, abduction-adduction, axial rotation). Inertial characteristics of each body segment were estimated according to the Zatsiorsky-Seluyanov model modified by [12].
The calculation of the biomechanical variables selected for the performance analysis, as well as complementary data processing, were done using the Visual 3D (5.01 version, C-Motion) and Matlab software (Mathworks). The variables selected for this analysis were based on the criteria used by the coaches to judge the athlete performance [9].
2.2 Parameter Definitions to Performance Analysis
We considered attack period (TA) to be comprised between the sudden increase of the pelvis CM velocity in the anterior-posterior direction and the instance when it drops to zero. Within TA, the period between the front-foot ground contact loss and its subsequent return to ground (front-foot heel contact) comprises the front-leg swing phase.
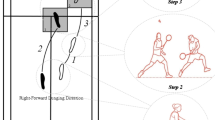
We defined the period between the front-foot ground contact loss and the instance when maximum front-foot forward velocity was achieved as swing initiation (SI). For the whole TA, we calculated: the body CM displacement and velocity; the front-foot CM displacement and velocity and the relative position of the body CM projection in the support base (CMP in base), i.e., the distance in anterior-posterior (AP) direction between the body CM projection in ground plane and the back-heel, given in percentage of the instantaneous AP distance between the back and front heel (DHH). The time series were filtered using a 4th order, zero leg, low-pass Butterworth filter, with a 6 Hz cut off frequency (Fig. 3).

Lunge parameters.
As an initial investigation, we focused on some aspects of body and front-foot kinematic. We ought to find kinematic variables that could distinguish between a well-executed and ill executed lunge. The following variables were, thus, calculated from the time series of each of the four selected trials: front-foot-step length; body CM range of motion in AP and lateral direction; vertical body CM oscillation, as well as its maximal and minimal displacement from initial position; maximal body and front-foot CM forward, downward and upward velocity; mean body and front-foot CM velocity and acceleration in AP and vertical direction, during front-leg SI; maximal high reached by the foot; maximal relative position of body CM in support base from lunge initiation to the instant front-foot lose ground contact and at front-foot heel contact and the instant maximal upward and forward velocity are reached. Displacements, velocities and accelerations were normalized by the individual’s leg length and temporal variables were normalized by TA.
Although, many statistical tools are available to identify a group of variables capable to differentiate between two conditions or groups, we choose to start from a more conservative approach. For each one of the selected variables, the mean of the two BR (mBR) and the mean of the two WR trials (mWR) were calculated for each athlete. In order to identify if there were biomechanical parameters that similarly affect the group performance we ran a Wilcoxon signed-rank test, for each variable, to compare the mBR and the mWR within the sample, adopting for that a significance level of 5%. In addition, we calculated, the mean differences between mBR and mWR for these athletes (mdiff), and the respective standard error (SEdiff) and, from these two quantities, the Z-score for the comparison between the group mean difference and zero mean (ZG, Eq. 1), in order to evaluate the “size” of the difference. We also tried to identify important elements that discriminate the performance of each athlete alone. Thus, for each athlete and variable, we calculated, the individual Z-Score as the difference mBR and mWR divided by the standard error of this difference (ZI, Eq. 2; SEWR and SEBR) [9]. We considered relevant the differences for which Z-Score were greater than 2.0.
2.3 3D Digital Platform Development
The Virtual Platform was developed based in a Game Engine. Game Engines are programming tools (mostly with visual interfaces) used in computers to make Games, Simulations and other interactive applications. Since they are currently the best available tools for 3D virtual scenes. The core system was based in Unity3D (www.unity3D.com) in addition to some add-ons such as NGUI (http://www.tasharen.com/) and others.
The system was split in modules to follow the Scrum, the adopted methodology of development. That way we could develop and integrate each module in incremental updates of the system. An eyetracking database was included in the platform as described in [13] as per coach’s wishes, in order to allow future comparisons, but the results will not be discussed in this article.
The components are presented in Fig. 4.

System module diagram [9].
Those modules were integrated in a single stand-alone software and each function is described below:
-
Core System: Is the main framework where all the systems are integrated. It includes menus, 3D viewport, graphs, skeleton reconstructions and other interfaces.
-
Animation System: Present the captured animation using a skeleton reference where you can select bones or joints.
-
Graph System: Synchronized with the animations we present some graphs related to the captured movements. This includes Bone Rotation, Position and others.
-
Eyetrack Database: Here, the Eye Track data collected were made available.
The interface of the system was planned to be easy to use and understand, an important feature since most of the users may not have fluency in 3D interactive applications. In Fig. 5 you can see the main Mobile interface version.

Main interface of the mobile version [9].
During the development a process was implemented to insert all the data in the platform, it follows some tasks. First the model captured in BVH format was imported into Blender (www.blender.org). Blender is a Open Source 3D Software and was chosen because it allowed us to make custom scripts to import and process the animation preparing it for the platform. It greatly speeds up your work (Fig. 6). The script automates the following tasks:
-
1.
The animations are converted to a metric scale of 0.001, that way the model gets 1:1 scale when imported in Unity.
-
2.
All the animation poses are cleaned for wrong keyframes and the correct segment that represents the movement of interest.
-
3.
All the segments (bones and joints) are renamed for a correct standard that we can read in the platform. It’s used for the skeleton reconstruction.
-
4.
All the data are imported and converted to a XML file. That way we can read it in the platform and plot the Graphs.
-
The model is exported as FBX format that can be read by the platform.
-

Clean-up and name fixes process in blender [9].
Graph System
The Graph System was proposed to shows selected data from elements of interest from the animation model. It can be a data of a Segment, a Joint or not necessarily associated to a skeletal element as Data for gravity center and others. Also, the system is flexible enough to handle multiple data type, some are axis based such as position, others are only angles. The Fig. 4 shows the Desktop version of the platform using the Graph system (Fig. 7. Legend: 1 - To select the Athlete, 2 - To select the Element to Analyze, 3 - To select the Data, 4 - to show the Graph, 5 - To select options for instance Axis and Scale to Show).

Desktop platform with the graph system [9].
Eye Tracking Database
Inside the Eye Tracking Database we can find all the data collected from the eye tracking system of the athletes. The image above shows the usage of the eye tracking database (Fig. 8). It commonly contains 3 files: .tsv file with the RAW data of the Eye tracking; .xlsx file with a more accessible data that can be read in Excel; .mp4 video with the Eye tracking mirroring what the athlete sees during the execution of the movement.

Eye tracking information at the platform [9].
3 Results and Discussion in the 3D Digital Platform
The digital platform allows the user to visualize the time series and instantaneous values of biomechanical variables, by selecting the corresponding joint or segment in the athlete’s movement animation. In Fig. 9 which shows the Integration of the data from different sources that is inserted into the platform.

Data integration into the 3D platform.
At the present, the following variables are allowed for visualization: ankle, knee, hip, wrist, elbow and shoulder joint angles at the frontal (abduction-adduction) and sagittal plane (flexion-extension), as well as the CM linear displacement and velocity for the whole body, pelvis, trunk, head, upper and lower arms, hands, feet, shanks and thighs. An example of the data feeding the platform can be seen in the Figs. 10 and 11. The data for the five athletes (A1–A5) are shown together just for illustration purposes.

Whole body center of mass (CM) displacement and velocity in the forward, vertical (upward positive) and lateral (unarmed side, positive) directions at the best performance of each one of the five athletes analyzed (A1–A5). Vertical lines indicate the instant at which CM achieved the higher forward velocity [9].

Joint angle in the sagittal plane for the armed side and unarmed side lower limb joints, during a lunge attack without the presence of any target to be hit, at the best performance of each one of the five athletes analyzed (A1–A5). An increase in joint angle means joint flexion. Vertical lines indicate the instant at which the athlete’s CM achieved the higher forward velocity [9].
3.1 Performance Results
When analyzing qualitatively the behavior of the temporal series we can notice that the athletes executed the lunge in a similar way, although synchronization between lower and upper joints (see Figs. 10 and 11), range of movement (e.g., Figs. 12 and 13) may vary considerably between them.

Joint angle in the sagital plane (shoulder and elbow) and frontal plane (shoulder) for two of the armed side and unarmed side upper arm joints, during a lunge attack without the presence of any target to be hit, at the best performance of each one of the five athletes analyzed (A1–A5). An increase in joint angle means joint flexion and abduction, respectively. Vertical lines indicate the instant at which CM achieved the higher forward velocity [9].

Foot and hand center of mass (CM) velocity in the forward and vertical (upward positive) direction, during a lunge attack without the presence of any target to be hit, at the best performance of each one of the five athletes analyzed (A1–A5). Vertical lines indicate the instant at which CM achieved the higher forward velocity [9].
With regard to the comparison between the BR and WR trials (respectively, solid versus dashed lines in Figs. 14, 15, and 16) it is not possible to observe a unique pattern in all the athletes differing between a well executed and a ill executed lunge. Even when comparing the four trials of the same athlete, we did not observed a well-established kinematic pattern differing the two BR and the two WR.

Front foot (ipsilateral to the armed side) center of mass (CM) forward velocity during a lunge attack, for the two best-rated (solid lines) and two worst-rated (dashed lines) trials of each subject (each plot corresponds to one athlete; A1–A5, from left to right). Time is normalized to lunge duration and velocity to the individual’s leg length (L). Vertical lines indicate, respectively, the front-foot ground contact loss and its subsequent return at each trial.

Front foot (ipsilateral to the armed side) center of mass (CM) vertical velocity during a lunge attack, for the two best-rated (solid lines) and two worst-rated (dashed lines) trials of each subject (each plot corresponds to one athlete; A1–A5, from left to right). Time is normalized to lunge duration and velocity to the individual’s leg length (L). Vertical lines indicate, respectively, the front-foot ground contact loss and its subsequent return at each trial.

Relative position of the body CM projection in the support base during a lunge attack, for the two best-rated (solid lines) and two worst-rated (dashed lines) trials of each subject (each plot corresponds to one athlete; A1–A5, from left to right). Time is normalized to lunge duration and the CM position to the instantaneous distance between both hells (base length). Vertical lines indicate, respectively, the front-foot (ipsilateral to the armed side) ground contact loss and its subsequent return at each trial.
In addition, Wilcoxon test showed no significant differences in any of the selected variables when comparing the BR and WR trials. However, for the variables described in Table 1 the Z-score for the group exceeded the value of 2.0. When considering the athletes’ performance individually, we identified relevant differences (individual Z-score greater than 2.0) in variables other than that described in Table 1 (see Table 2).
3.2 Performance Analysis
By comparing the performance of a lunge attack in a group of five elite athletes, our results indicated that no single variable was able to be distinguish, for all the athletes, the best-rated gesture from the ones not so well performed, classified according to criteria of the coach. Such result reinforces the idea that each athlete when following the taught techniques impress in the gesture its own pattern [2, 3]. Therefore, deviations in the proper execution of this technique will have different implications in the kinematic of the movement for different subjects, and the coach when evaluating each athlete performance considered these particularities. This variability in almost all the dependent variables and the difference in time coordination was expected because the athletes have different backgrounds, different physical structures, and follow their own pattern, in spite of the usual one. These peculiarities can be a factor of performance excellence.
However the differences between the BR and WR trials, with respect to the variables shown in Table 1, seem to be relevant. Thus, coach perception of a poor performance, presumably includes lower lunge forward velocity and smaller step size, what is in accordance to [2, 8, 14].
Other subtle aspects of lunge kinematic, as the forward and downward velocities of the front-foot may also be determinant to the lunge performance independent of any particular features. We observed that front-foot maximal forward and downward velocities were 7.5% higher in the BR trials. The front-foot is accelerated not only by the forces generated by the ipsilateral knee and hip muscles but also by the energy transferred from other body segments to the front-leg. Thus, proper coordination between trunk, as well as upper and lower limb joint movement is necessary to increase front-foot velocity in both directions. Further studies should be designed to understand how energy is transferred from one segment to another in order to propel the front-foot and the body CM, as an effort to understand the effect of body segment and joint coordination on lunge performance; not only the sequential mechanical pattern of the trailing leg described by [7, 8].
Our result also indicates that the body position at front-foot heel contact can possibly be a particularly important determinant to lunge performance. We observed that even a small variation in CM position in base at this period (1.1%), resulted in relevant differences between BR and WR trials for the group. The literature [15] described that plantar pressure is higher in the front foot; [16] that fencers balance increased after training and [17] determined the foot loading characteristics of three fencing movements. None of them studied the relationship between CM position in the base and the resulting movement. This is an important variable that shows the change of weight bearing from the rear foot to the front foot and is determinant for the stability of the fencers during and after the lunge performance. This is an easy understandable variable for the coach and should be more explored.
When analyzing variables that affected individuals’ performance we noticed that the relative difference between BR and WR were much higher (Table 2), which corroborate the idea that the coach may use individual criteria to judge each athlete. Vertical CM movement was indicative of poor performance for athletes A1 and A2 [1]. When A1 perform best, the body CM did not oscillate above its initial position and, during front-foot SI, the gesture was performed with a greater deceleration of body CM downward movement, while A2 oscillated in the vertical direction with a smaller range and achieved maximal upward velocity earlier in the attack period. For athlete A5, the front-leg movement was an important factor affecting performance [2]. During the BR trials, this athlete elevated the front-foot higher and with a greater velocity, what may have contributed to accelerate the body CM upward, to a greater velocity. Finally analyzing A4 performance we noticed, the body posture adopted until SI was decisive. During the BR trials, this athlete inclined further the upper body, projecting the body CM beyond the front-foot heel [2] and keeping a more unstable posture. In addition, and possibly as a consequence of the more unstable posture, during swing initiation the front-foot was moved with a greater forward velocity. In those trials, the CM was accelerated to a greater forward velocity and a lower upward swing during initiation, so that maximal CM forward velocity was achieved earlier during attack period.
These individuals analysis were important for our main interest of fulfilling the coach’s needs, and give support for daily training.
4 Conclusion
The 3D platform approach is an attempt to enhance and facilitate the discussion between fencing coaches and researchers in order to explore biomechanical factors and visual aspects that may lead to an improvement on épée fencing techniques, as well as in teaching and training methods. Its support for mobile and desktop highlights the importance of visualization and interaction of the coach with results on the biomechanical parameters and visual search strategies in a more understandable and relevant way of training.
The results showed that a good lunge performance, in accordance to the coach’s criteria, is very individually dependent. This great variability was expected due to the high level of the athletes. Some variables related to CM and front foot displacement seem to identify a good performance, but it is necessary for a greater sample to test this. It is not expected that a specific variable defines a good performance but that the performance suffers influence from a group of variables that interrelated. More advanced statistics will be necessary to study these possible relationships.
In general, these preliminary results are supposed to bring to light some aspects that can be responsible for a good lunge performance in fencing. But above all, this research has the aim to reassure it is necessary to establish a good relationship between the coach and the researchers, and to reinforce that we must try to find different ways of reaching the daily life of the athletes without losing the academic precision.
References
Roi, G., Bianchedi, G.: The science of fencing: implications for performance and injury prevention. Sports Med. 38, 465–481 (2008)
Gholipour, M., Tabrizi, A., Farahmand, F.: Kinematics analysis of lunge fencing using stereophotogrametry. World J. Sport Sci. 1, 32–37 (2008)
Chen, T.L.-W., Wong, D.W.-C., Wang, Y., Ren, S., Yan, F., Zhang, M.: Biomechanics of fencing sport: a scoping review. PLoS ONE 12(2), e0171578 (2017). (Ed. by, T.M. Barbosa). https://doi.org/10.1371/journal.pone.0171578
Klauck, J., Hassan, S.E.A.: Kinematics of lower and upper extremities motions during the fencing lunge: results and training implications. In: ISBS—Conference Proceedings Archive, vol. 1, pp. 170–173 (1998)
Bottoms, L., Greenhalgh, A., Sinclair, J.: Kinematic determinants of weapon velocity during the fencing lunge in experienced épée fencers. Acta Bioeng. Biomech. 15, 109–113 (2013)
Steward, S.L., Kopetka, B.: The kinematic determinants of speed in the fencing lunge. J. Sports Sci. 23, 105 (2005)
Guilhem, G., Giroux, C., Couturier, A., Chollet, D., Rabita, G.: Mechanical and muscular coordination patterns during a high-level fencing assault. Med. Sci. Sports Exerc. 46, 341–350 (2014)
Mulloy, F., Mullineaux, D., Irwin, G.: Use of the kinematic chain in the fencing attacking lunge. In: 33 International Conference on Biomechanics in Sports, Poitiers, Annals of the 33 International Conference in Biomechanics in Sports (2015)
Corrêa, S.C., Orselli, M.I.V., Xavier, A.P., Salles, R.J.D., Cid, L.G., Guimarães, C.P.: Kinematics fencing’s analysis based on coach’s criteria. In: 33 International Conference on Biomechanics in Sports, Poitiers, Annals of the 33 International Conference in Biomechanics in Sports (2015)
Guimaraes, C.P., Balbio, V., Cid, G.L., Zamberlan, M.C., Pastura, F., Paixao, L.: 3D virtual environment system applied to aging study - biomechanical and anthropometric approach. Proccedia Manuf. 3, 5551–5556 (2015)
Capozzo, A., Catani, F., Della Croce, U., Leardini, A.: Position and orientation in space of bones during movement: anatomical frame definition and determination. Clin. Biomech. 10, 171 (1995)
de Leva, P.: Adjustments to Zatsiorsky-Seluyanov’s segment inertia parameters. J. Biomech. 29(9), 1223–1230 (1996)
Guimarães, C.P., et al.: 3D interactive environment applied to fencing training. In: icSPORTS 2016 – Proceedings of 4th International Congress on Sport Sciences Research and Technology Support, vol. 1, pp. 05–196. SCITEPRESS - Science and Technology Publications, Lda, Porto (2016)
Gutierrez-Davila, M., Rojas, F.J., Antonio, R., Navarro, E.: Response timing in the lunge and target change in elite versus medium-level fencers. Eur. J. Sport Sci. 13, 364–371 (2013)
Geil, M.D.: The role of footwear on kinematics and plantar foot pressure in fencing. J. Appl. Biomech. 18, 155–162 (2002)
Kim, T., Kil, S., Chung, J., Moon, J., Oh, E.: Effects of specific muscle imbalance improvement training on the balance ability in elite fencers. J. Phys. Ther. Sci. 27, 1589–1592 (2011)
Trautmann, C., Martinelli, N., Rosenbaum, D.: Foot loading characteristics during three fencing-specific movements. J. Sports Sci. 29, 1585–1592 (2011). https://doi.org/10.1080/02640414.2011.605458
Acknowledgements
CNPQ is the sponsor agency of this research.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Guimarães, C.P. et al. (2019). The Determinants of a Good Lunge Performance in Fencing - In Two Approaches. In: Cabri, J., Pezarat-Correia, P., Vilas-Boas, J. (eds) Sport Science Research and Technology Support. icSPORTS icSPORTS 2016 2017. Communications in Computer and Information Science, vol 975. Springer, Cham. https://doi.org/10.1007/978-3-030-14526-2_1
Download citation
DOI: https://doi.org/10.1007/978-3-030-14526-2_1
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-14525-5
Online ISBN: 978-3-030-14526-2
eBook Packages: Computer ScienceComputer Science (R0)