
Abstract
Structural Health Monitoring functionalities are aimed at constantly assessing the health of a building in order to prevent dramatic consequence of a damage. This work describes a well-defined wireless sensor network system installed over a steel beam capable to perform modal parameters estimation, such as natural vibration frequencies and modal shapes. Signal Processing Techniques were aimed at computing Power Spectral Density of the acceleration signals acquired, dealing with parametric and non parametric approaches. Algorithms in frequency domain, together with the Second Order Blind Identification method were implemented for modal shapes reconstruction. Beside a satisfactory agreement between the theoretical model and the output response of the algorithms implemented, versatility, easiness of reconfiguration, scalability and compatibility with long term installation are among the most powerful advantages of the architecture proposed. Light weight, low power consumption also enhance the capabilities of the system to provide real-time information in a relatively cheap way.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The actual trends in civil engineering increased the capability to build complex structures, designing elements which are characterized either by the peculiarity of their architectural properties or by composing materials. This evolution in structural development requires continuous information to be extracted and analyzed in order to assess the integrity of buildings, preferably according to automatic techniques which simplify and accelerate data acquisition and management. Furthermore, power consumption, costs and weight shall be minimized not only for energetic reasons but also to make the presence of devices as unobtrusive as possible. Historical buildings can also benefit from these studies, since nowadays most of them are used for different purposes. Consequently, evaluating the robustness of infrastructures becomes fundamental for human safety.
In such a scenario, electronic devices have been designed according to Structural Health Monitoring (SHM) requirements, primarily with the intent of providing a constant monitoring of the structure under test and correspondingly identifying damages in case of occurrence. These two aspects together enable to generate periodic reports about the state of the structure over a wide period of time, mainly related to the effects that usual stresses (i.e. wind, weather) can evoke. Traditional systems performance and requirements have primarily demonstrated to produce expensive designs and steady deployment, connected respectively to the high accuracy and sensitivity of sensors and to the fixed positions associated to each of them. Moreover, problems arise when dealing with long-term acquisition phases due to the presence of piezoelectric transducers whose cost compel researchers to limit the duration of experimental campaigns and reuse them. Another important aspects to be underlined is a strongest consciousness of the fact that the signals recorded by piezoelectric devices are not completely suited to investigate the dynamic behavior and the stability of infrastructures with sufficient precision.
Recently, evident improvements have brought about distributed sensor network solutions which provide embedded data processing, mainly achieved by installing a certain number of nodes along the whole structure. The usage of Micro-Electro Mechanic (MEM) sensors provides, among the many benefits, versatility, scalability, non-invasiveness and long-term analysis. Positions can be changed, acquisition process reconfigured digitally without any particular consequence for the structure, hence containing obtrusiveness. Synchronized vibrations recorded by inertial elements within nodes installed in any point of the building can be examined in order to compute modal parameters, which consists of natural frequencies, damping ratio and modal shapes. The basic idea of SHM is to continuously analyze the internal vibration features of a building and compare them to structural properties measured under nominal conditions, thus revealing possible changes in normal modes of oscillation which may differ for number, width and frequency. In particular, when damages do not occur, the behavioral dynamics is unchanged and only minimal drifts can be noticed.
This work focuses on a sensor network with embedded data processing for real-time SHM, specifically developed to cope with low power consumption, light weight, small size requirements. In order to assess the functionality of the system, vibrational measurements were recorded from a steel beam undergoing a mechanical stress. The presented setup is simple but efficient for these purposes, being very common in modal analysis scenarios. In the second section a general overview of the node is presented, followed by Sect. 3 in which the description of the algorithms implemented to evaluate natural frequencies and modal shapes of the experimental setting, proving the reliability of the nodes in a SHM context.
2 Sensor Node
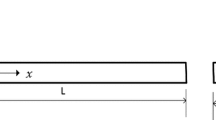
In this paper, a simple but effective setup for modal analysis was developed to assess the capability of the proposed sensor node network to cope with Real-time Structural Health Monitoring (SHM) functionalities. The importance of this discipline relies on the capability to periodically analyze the vibration features of a structure through a network of smart sensors acquiring information from a plurality of transducers. Whenever a change is detected with respect to the ordinary structural properties, the state of the entire system under test can be inferred. As reported in Fig. 1, five sensor nodes equally spaced were installed in the first half of a \(L = {1900}\,\mathrm{mm}\) steel beam with cross-section base \(b = {60}\,\mathrm{mm}\) and height \(h = {10}\,\mathrm{mm}\) in free vibrations conditions.

Experimental setup for modal analysis verification and comparison
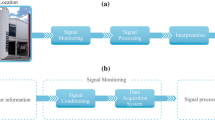
Each sensor is roughly \(30\,\mathrm{mm}\times 23\,\mathrm{mm}\), drawing power from a Sensor Area Network (SAN) bus based on Data-over-Power (DoP) communication which simultaneously allows for data transmission and power supply. At an architectural level, four main blocks cooperate to achieve data collection and processing as schematically depicted in Fig. 2.

Developed sensor node
Following the flow of information, real-time acceleration samples are recorded by means of a ST Microelectronics LSM6DSL iNEMO Inertial Measurement Unit (IMU) with a 3D accelerometer characterized by a maximum dynamic range of \({\pm 16}\,\mathrm{g}\). They are subsequently sent to a ST Microelectronics Microcontroller Unit (MCU) which is the core unit of this device, especially designed for low consumption even in nominal condition. It includes a \({40}\,\mathrm{KiB}\) SRAM memory for temporary storage of the samples, but also an embedded \({256}\,\mathrm{KiB}\) FLASH memory is present giving the opportunity to implement signals preprocessing capabilities. The presence of a Serial Peripheral Interfaces (SPI) and Universal Synchronous Asynchronous Receiver Transmitter (USART) enables to transmit input/output serial data independently of the nominal execution of tasks. Collected data are sent to an external SRAM memory which is mainly inserted to expand the storage capability of the device. A ST XCVR transceiver interfaces the MCU to the bus thanks to a mesh of passive elements. Additionally, recordings flow through a gateway to be sent to a user defined cloud system. A Low-Drop Out regulator provides energy, establishing the voltage to \({3.3}\,\mathrm{V}\). The sensor node so far described performs an overall consumption lower than \({40}\,\mathrm{mW}\), with small size and light weight, being it less than \({5}\,\mathrm{g}\). Considering that five sensors have been installed, the global power in continuous monitoring does not go over \({300}\,\mathrm{mW}\), weighing less than \({50}\,\mathrm{g}\). The overall properties explained are enforced by the extreme scalability and versatility of the sensor node implemented, considering that up to 64 elements can be connected and managed sharing the same bus.
3 Modal Estimation
3.1 Natural Frequency Estimation
Signal Processing Techniques have been applied to the raw acquired signals to extract natural frequencies and modal shapes. The results of the implemented algorithms were compared with the theoretical predictions obtained from the physical model of the beam to assess the performances of the designed circuitry. In particular, the extracted three natural frequencies are compared with the nominal values estimated as 5.28, 21.14, and \({47.51}\,\mathrm{Hz}\) through the theoretical formula:
where \(\rho ={7880}\,{\mathrm{kg/m}^3}\) is the density of the steel, \(A=bh\) and \(I=bh^3/12\) are respectively the cross-section area and moment of inertia respectively, and n is the frequency index. Here, for accurately measured beam dimensions and weight, a value of the Youngs modulus \(E={195}\,\mathrm{GPa}\) was assumed to minimize the error on \(f_1\).
The evaluation of the modal parameters in a phase when no damage occurs is of extreme importance because it creates a set of benchmark values that must be as accurate as possible in order to prevent potential errors during the real-time estimation stage.
Several procedures were considered to compute the Probability Density Function (PSD) of the data series, based on non-parametric and parametric approaches. Among the former, we considered the Frequency Domain Decomposition (FDD) [1] periodogram estimation [2] Welch evaluation [2] whilst the latter refer to Autoregressive (AR), and AR+Noise models [2] which are suited for modal analysis in presence of strong acquisition noise.
Results The analysis of the results obtained can be deployed at two different levels. First, according to the relative error depicted in Fig. 3, we may consider that the error is not uniformly distributed over the whole spectrum, since it is mostly relevant at higher frequencies where Signal to Noise Ratio (SNR) is worse and the overall energy of the structure is lower. Second, it is worth noticing that AR models seem to have the best performance, allowing to assert that noise may affect the measurements and it has to be correctly considered. Percentages are always lower than 2.5%, thus assessing the reliability of the architecture proposed. Furthermore, since the second vibrational mode of the structure is detected with the lowest precision, it is possible to argue that it may be related to the solicitation induced over the beam. Generally, the PSD computed with the techniques mentioned, demonstrates that, for the first part of the spectrum, there is an evident vertical alignment between the frequencies computed and those expected, meanwhile the output is less precise when frequency increases. Furthermore, as predicted by the model and clarified by the spectrum reported in Fig. 4, an additional frequency near \({97}\,\mathrm{Hz}\) can be detected. This fourth vibrational mode was not considered for further studies since it is close to Nyquists frequency. For this reason, the errors can creep due to the scarcity of samples to be used in order to recreate the associated modal shapes, notwithstanding the fact that it can be extracted from the spectrum itself.

Error distribution in vibrational modes extractions comparing different techniques of PSD estimation

Example of PSD estimation with parametric and non parametric approaches
3.2 Modal Shapes Reconstruction
Beside data and power communication, the bus connecting the sensor nodes also natively allows for data acquisition time base synchronization and consequently the output-only estimation of modal shapes. For this purpose, algorithms in frequency domain were developed, followed by the application of the Second Order Blind Identification (SOBI) method, a strategy which reveals independent components hidden within a set of measured signal mixtures [3].
Frequency Domain Decomposition Technique Frequency Domain Decomposition (FDD) method identifies modal parameters of a dynamic system by applying the Singular Value Decomposition (SVD) technique to the output spectral density matrix [1]. This algorithm works as an output-only estimation technique, whose computation merely consists of two different steps: given a data set, it estimates the PSD and consequently filters n dominating peaks, where n refers to the degree of freedom of the system under consideration. Formally, its operating principle relies on the key-function named Frequency Response Function (FRF) matrix:
where \([\mathrm {G}_{xx}(\omega )]\) and \([\mathrm {G}_{yy}(\omega )]\) denote respectively PSD matrix of the inputs and the outputs, \([\mathrm {H}(\omega )]\) represents FRF matrix and \(^H\) is the conjugate transpose operator. Applying the SVD to the output spectrum \([\mathrm {G}_{yy}(\omega )]\), it is obtained
with \([\mathrm {U}]\) being the orthogonal matrix of the singular vectors and \([\mathrm {V}]\) is the singular value diagonal matrix organized by column. Concerning the recorded data we have that
where the response of the structure y(t) comes from the decomposition of these output signals into participations from the different modes \([\mathrm {\Phi }]\) expressed via the modal coordinates q(t). Using the Correlation matrix and applying the SVD to it, it is finally demonstrated that
The assumptions are that \([\mathrm {G}_{yy}(\omega )]\) is a diagonal matrix, i.e. the modal coordinates are uncorrelated, and that the mode shapes (the columns in \([\mathrm {\Phi }]\)) are orthogonal. Comparing (3)–(5) and assuming that the decomposition described by (3) is unique, it follows that the singular vectors coincide with the estimation of the mode shapes and the corresponding singular values present the response of each mode (Single Degree of Freedom systems) expressed by the spectrum of each modal coordinate.
Second Order Blind Identification Technique SOBI algorithms found their theoretical formulation on the assumption that the second order momentum, that is the expected covariances, is completely representative of the observed data. Considering a set of acquired signals y(t), (6) defines covariances between the values of two different signals \(y_i(t)\) and \(y_j(t)\), where \(\tau \) is the time-lag or delay:
Furthermore, for \(i=j\), (6) turns into the auto-covariances \([\mathrm {C}_y^{\tau }]_{i}\) between the same signal \(y_i(t)\) at different time steps. Combining together these quantities, this technique exploits the diagonalization of the time-lagged covariance matrix, resulting as in (7)
where \(^H\) denotes the conjugate transpose operator.
The time structure introduced contributes to relax the requirement of non Gaussianity for the Independent Components (ICs), replaced by the condition that all the independent sources have different and nonzero auto-covariances. As described in [3], imposing that the covariances for \(\tau =0\) have zero value, the decorrelation between the observed signals y(t) can be assured. As a consequence, the obtained signals satisfy the following property:
Nevertheless, the correlation matrix does not contain enough information for the separation. In fact, due to the independence property of the ICs, all their lagged covariances, and not only one, should be zero:
The SOBI estimation is therefore performed starting from the assumption that each observed data y(t) is obtained as a linear combination of unknown sources x(t) through a mixing matrix \([\mathrm {A}]\):
enforcing that time-lagged covariances are zero as well. This leads to
The problem is solved whenever \([\mathrm {A}]\) is computed [3]. Modal shapes are contained in the column of the mixing matrix, thus enabling the reconstruction process.

Modal shapes extracted with different techniques: FDD, SOBI. It is worth noting that the experimental curves fit the model almost perfectly at low frequencies, whereas the deviation is some-how more evident at higher frequencies
Results The results depicted in Fig. 5 display the first three mode shapes extracted with two different techniques superimposed to the theoretical mode shapes. The experimental behavior of the structure fits the model almost perfectly at low frequency, whereas the deviation is more remarkable going up in the spectrum. This behavior is justified by the fact that SNR is not sufficient to discriminate among true signal and noise, especially for the higher components which mainly suffer from this effect. According to Fig. 4, the first vibrational mode contains almost the overall energy of the acquired acceleration, appearing to be almost \({40}\,\mathrm{dB}\) higher than the other analyzed modes. It is also important to highlight that, although the SOBI method is totally unsupervised, its performances are almost equivalent to FDD, making it suitable for autonomous damage detection system. Being almost equal the outcome of the tested algorithms, it is necessary to underline the advantages that a blind strategy can produce. As a matter of fact, the computation of a Blind Source Separation (BSS) method relies on a restricted a-priori knowledge about the nature of the extracted signal, therefore it is entirely independent from the observed phenomenon. In addition, this technique is a completely unsupervised estimation which does not require to be supplied with users information about the expected frequency, such as in FDD. Moreover, being the SVD an expensive algorithmic process to be computed, especially when the dimension of data is very large, the computational cost associated to frequency methods cannot be forgotten.
Some aspects have to be underlined when dealing with the idea of embedding real-time signal processing capabilities in a low power sensor node, thus making realistic the possibility to offer an immediate estimation of modal parameters and consequently testing the health state of a given structure. The first point to be faced is connected with the data sources every algorithm requires, dividing the techniques between single-sensor driven methods and sensor-array driven estimators. For example, FDD naturally works with matrices, where every column (row) is a collection of samples provided by a single sensor over the global acquisition time. On the contrary, parametric methods for vibrational modes estimation can be applied onto single vectors, therefore they are best suited for single nodes. The second relevant aspect is ruled by the specificity of the processed samples. Indeed, SOBI performances are ideal when data under test refer only to the natural damped decaying of signals, whereas other techniques performance improves when samples cover a wide time-interval. In such a scenario, there are two different possibilities to exploit real-time estimation, simply derived from the intrinsic nature of the algorithms tested. In a master-slave architecture, a specifically crafted sensor node can perform the whole computation starting from samples provided by all the other sensors. A different strategy is based on the hypothesis of a multi-master system in which the processing phase is provided by each node separately and finally the outcomes are merged. The choice of strategy impacts on the algorithmic complexity and the computational requirements needed, which have to reach the best trade-off between power consumption and computational time, especially in terms of synchronization, coherency and storage capability.
4 Conclusions
The presented experiments reveal the potentialities of the implemented sensor network for SHM applications thanks to its versatility and high scalability, becoming a suitable candidate for a relatively cheap and low consumption system capable to provide real-time information.
References
Hoa, L.T., Tamura, Y., Yoshida, A., Anh, N.D.: Frequency domain versus time domain modal identifications for ambient excited structures. In: International Conference on Engineering Mechanics and Automation (ICEMA 2010), pp. 1–2 (2010)
Stoica, P., Moses, R.L., et al.: Spectral Analysis of Signals, vol. 1. Pearson Prentice Hall, Upper Saddle River (2005)
Poncelet, F., Kerschen, G., Golinval, J.-C.: Experimental modal analysis using blind source separation techniques. In: International Conference on Noise and Vibration Engineering, Leuven (2006)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Zonzini, F., De Marchi, L., Testoni, N. (2019). A Small Footprint, Low Power, and Light Weight Sensor Node and Dedicated Processing for Modal Analysis. In: Andò, B., et al. Sensors. CNS 2018. Lecture Notes in Electrical Engineering, vol 539. Springer, Cham. https://doi.org/10.1007/978-3-030-04324-7_45
Download citation
DOI: https://doi.org/10.1007/978-3-030-04324-7_45
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-04323-0
Online ISBN: 978-3-030-04324-7
eBook Packages: EngineeringEngineering (R0)