
Abstract
Conservation planning is the science of choosing which actions to take where for the purpose of conserving biodiversity. Creating a system of protected areas is the most common form of systematic conservation planning. Hence, we will focus on the process of protected area selection in this chapter. Marxan is the most widely used software in the world for creating marine and terrestrial protected area systems. Because conservation planning is an important job skill for conservation and resource managers, you should understand the principles involved even if you don’t use this software in your job and even if you use software other than Marxan for systematic conservation planning. From this chapter, we would like you to.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others

Keywords
- Systematic Conservation Planning
- Protected Area System
- Boundary Length Modifier (BLM)
- Possingham
- Designated Conservation Areas
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
Objectives
Conservation planning is the science of choosing which actions to take where for the purpose of conserving biodiversity. Creating a system of protected areas is the most common form of systematic conservation planning. Hence, we will focus on the process of protected area selection in this chapter. Marxan is the most widely used software in the world for creating marine and terrestrial protected area systems. Because conservation planning is an important job skill for conservation and resource managers, you should understand the principles involved even if you don’t use this software in your job and even if you use software other than Marxan for systematic conservation planning. From this chapter, we would like you to:
-
1.
Gain an understanding of the principles of conservation planning: representation, complementarity, adequacy, efficiency, and spatial compactness;
-
2.
See and understand how these principles can be applied to a practical example; and
-
3.
Gain familiarity with Marxan software (via the Zonae Cogito interface).
In Exercise 1, you will explore a simple reserve design problem using a spreadsheet exercise (Exercise1.xls) to implement the basic principles of reserve design in a simple hypothetical landscape. In Exercise 2, you will use Marxan to design systems of protected areas in Tasmania. You will run Marxan through Zonae Cogito, a decision support system through which Marxan can be run in an interactive and user-friendly way. Software installation for Exercise 2 requires following detailed instructions provided here: http://www.uq.edu.au/marxan/docs/Installing%20Zonae%20Cogito%20on%20your%20computer.pdf and will likely require administrator privileges on your machine to install and operate properly. All the data files needed to complete the exercises can be found on the book website, along with some options for additional advanced exercises.
Introduction
Part 1. Systematic Conservation Planning
World-class conservation planning processes for land and sea use an approach known as systematic conservation planning (Moilanen et al. 2009; Possingham et al. 2006). Systematic conservation planning focuses on locating, designing, and managing conservation areas that collectively represent the biodiversity of a region for the least cost. In many cases, new protected areas are selected to add to an existing set of protected areas. The systematic conservation planning approach is transparent, and the system of protected areas function together to meet clearly defined conservation goals.
Systematic conservation planning is a departure from ad hoc and opportunistic approaches used in the past. An ad hoc approach is one in which site selection is driven by conservation urgency, affinity, scenery, and ease of designation, often avoiding areas that are politically or economically costly. Most national parks or other places considered to be areas for “conservation” were not chosen to meet specific biodiversity objectives (Possingham et al. 2000). Many existing protected areas were selected because of their amenity value, for example, as a vacation spot. Most are located in places unsuitable for other purposes such as agriculture or urban development (Pressey et al. 1993). Other areas have been selected to protect a few charismatic flagship or umbrella species (Simberloff 1998) without any guarantee that they will adequately conserve the biodiversity of a region. This ad hoc approach has resulted in a legacy of fragmented collections of sites in which some habitats or ecosystems, like the “rock and ice” of high mountain areas, are overrepresented, while low-lying fertile plains are underrepresented (Pressey et al. 1993; Soulè and Terborgh 1999).
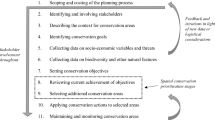
Systematic conservation planning is a more rigorous and accountable approach for selecting priority areas for protection compared to the opportunistic approach (Groves et al. 2002; Margules and Pressey 2000). Over the past 25 years, a systematic approach to conserving biodiversity has evolved (Moilanen et al. 2009; Pressey and Bottrill 2009) and now includes 11 well-defined stages (Table 13.1). Marxan was designed primarily to help inform stage 9, the selection of new conservation areas to complement existing ones in order to achieve the conservation objectives. Specifically, Marxan identifies potential priority areas for inclusion in a protected area network and provides other information to assist decision-makers in choosing the final selection of areas.
Fundamental Principles for Designing Conservation Areas
Here, we discuss five fundamental principles used when designing conservation areas: representation, complementarity, adequacy, efficiency, and spatial compactness (Margules and Pressey 2000; Possingham et al. 2006). Marxan can accommodate all of these principles.
Representation. Protected area systems should contain the full range of biodiversity, taking into consideration biodiversity composition, structure and function, and evolutionary processes. Incorporating as many kinds of biodiversity (or conservation) features as possible (such as species, ecosystems, vegetation types) will result in a more comprehensive protected area system. Protected area systems that represent all facets of biodiversity have high representativeness. For example, if you wish to protect populations of a particular species or samples of a habitat, it is best if the areas chosen cover the range of variation in that species and/or habitat. Wherever possible, the selection of areas should take into consideration any species/habitats that are rare, endangered, or considered unique.
Complementarity. Protected areas for conservation should be selected as a complementary set, where each one complements features of others. Sites with the highest species richness are not necessarily the most important for inclusion in a protected area system, because the most species rich sites may contain similar assemblages. Sites complement each other well if they contain different features of biodiversity. Consequently, their selection provides a combination of sites that achieve the goal of comprehensiveness in the most efficient way. The principle of complementarity means that planning is best informed by knowing what is already contained within existing conservation areas—an exercise referred to as gap analysis. The selection proceeds by iteratively reviewing how well the targets (e.g., 20% of total habitat for each species) are achieved when individual sites are added to (or removed from) the protected area system.
Adequacy. The goal of protected area system design is not to merely capture biodiversity, but to promote its persistence and long-term viability. Larger and more connected systems of conservation areas are considered to be superior to smaller and more isolated conservation areas. Larger connected systems can provide for the maintenance of ecosystems through connectivity and offset the effects of local catastrophes. A system-based approach to protected area system design—where the whole is more than the sum of its parts—recognizes the relationship between individual conservation areas, and therefore the role of each area as part of a system.
Ideally, a protected area system is designed to conserve enough of each feature of biodiversity to enable persistence. However, the minimum habitat area or population size required for the persistence of a species or ecosystem is rarely known, and often limited budgets mean that we cannot simply conserve more to be on the safe side. One general strategy proposed to address the issue of persistence in the absence of this knowledge is redundancy, making sure that you don’t have all of one feature in one place. Replication improves the likelihood of regional persistence, spreading the risk of failure by providing greater opportunity for recolonization of empty protected areas from other viable and connected areas.
Efficiency. Efficiency describes the ability of a protected area system design process to deliver biodiversity objectives for least cost or fewest resources. Because resources available to achieve conservation goals are finite, inefficient systems are less likely to achieve their goals. By planning protected area systems efficiently, we minimize the risk of exhausting available resources before biodiversity objectives are met (Ban and Klein 2009; Carwardine et al. 2008; Klein et al. 2008; Stewart and Possingham 2005). We describe the limiting resources or limiting factors as “costs.” The typical costs of a conservation area include:
-
Area available to reserve
-
Costs of ongoing management
-
Costs to industry, tourism, and recreation from displaced activities
-
Acquisition or land purchase costs
Marxan provides efficient solutions by incorporating these costs into the design process. A protected area system design process that ignores costs is not as practically useful as one that considers cost. Lastly, decisions about individual protected areas affect the performance of the protected area system as a whole. Efficiency is therefore also concerned with the way sites are prioritized for conservation. The most efficient solutions are obtained by selecting sites as a complementary set, rather than selecting sites one by one.
Spatial compactness. A compact protected area system, with a low edge:area ratio has three advantages over a fragmented system. First, biodiversity within a compact system is more connected, giving a greater chance of persistence compared with a fragmented system. Second, many of the most sensitive species are absent or have low population growth rates within edges. Finally, edges between a park and other areas cost money: a longer edge means more neighbors and more management costs.
Before we explore a real-world example and learn about the kind of software used by professionals, we will explore a small spreadsheet example that explores these themes.
Exercises
EXERCISE 1: Small-Scale Protected Area System Design
In this exercise, you will use the spreadsheet and provided handout to design protected area systems that reach conservation objectives in a cost-effective manner. Here, our objective will be to represent 20% of the total habitat area for each of three species in the study region. An additional objective will be to design protected areas with different degrees of spatial compactness. In this exercise, we consider a hypothetical landscape made up of a grid of 100 sites—referred to as planning units—arranged in a 10 × 10 grid:
-
1.
Download and unzip the folder called Exercise1.
-
2.
Within this folder, open the file Exercise1.xls. You will use the first sheet within the spreadsheet whose tab is labeled 3 features.
-
3.
Notice that this spreadsheet contains information on each planning unit. There are 100 total planning units, each in a separate row with a unique Planning Unit Identification Number [PUID].
-
4.
Notice the additional columns in the spreadsheet that include the cost of each planning unit, as well as the area of each species contained in a given planning unit.
-
5.
Notice the second column highlighted yellow, labeled [SELECTIONS]. In the spreadsheet, you can easily select a planning unit for inclusion in the protected area network by changing the value in the [SELECTIONS] field from 0 (unselected) to 1 (selected).
-
6.
Also of use is the file Exercise1_handout.pdf within the same folder. You can use this handout to visualize the spatial configuration of your protected area system. It contains information about the cost of each planning unit and the area of each species in each planning unit.
-
7.
Notice when you select a planning unit, summary information [green cells] is automatically updated for your protected area system, including the cost of the protected area system selected [SUM COST] as well as the amount needed to meet the targets for the protected area system [TARGET GAP].
-
8.
You can also track the individual species targets [red cells] as you select various planning units and then determine if your target is met. Remember, our target is 20% of the total habitat area for each of these three species.
-
9.
To answer the questions below, you will use this spreadsheet to find a protected area system that meets all of your conservation targets in a cost-effective way. When you have found a protected area system that meets your conservation goals, record the value of [SUM COST], the cost of your protected area system.
-
10.
If you wish, you could also devise a simple heuristic to prioritize sites. For example, at each site, you might compute the sum of feature areas and divide by the site cost as a measure of the cost-effectiveness of a single site.
-
Q1 Without considering spatial compactness, what is the lowest cost of a protected area system you can design that meets the desired habitat protection objectives? Record the cost. Save the “map” of your protected area system (either using Excel or by coloring your handout).
-
Q2 What is the additional cost of a protected area system that meets the habitat protection objectives but with a low, medium, or high degree of spatial compactness? As you answer this question, consider the following:
-
Remember that how you determine the level of compactness can be a subjective choice.
-
Create a graph where the cost of the protected area system is the X-axis, and the boundary length (edge or compactness) is the Y-axis. Good protected area systems will be in the left-hand bottom corner of your plot.
-
If you are working as a group, each person can create a single system but then include all of your systems together on one plot.
-
Part 2. Using Marxan for Conservation Planning
What Is Marxan?
Marxan is software that delivers decision support for systematic conservation protected area design (Ball et al. 2009). It was initially designed to solve a conservation problem known as the minimum-set problem, where the goal is to achieve a certain amount of every biodiversity feature for the smallest possible cost (McDonnell et al. 2002). Or put another way, the objective is to minimize costs subject to the constraint of meeting biodiversity targets (Possingham et al. 2000; Ball and Possingham 2000). An example biodiversity target might be to ensure at least 30% of every habitat is represented in a protected area network. A planner is likely to want to minimize the total monetary cost required to purchase and manage a conservation area that meets this constraint.
The number of possible solutions to this problem is vast and beyond the ability of the human mind or a computer to consider. For example, the number of possible solutions to Exercise 1 is 2100 or 1.3 × 1030! For this reason, algorithms have been developed to support decisions around the design of conservation areas. Furthermore, not only would it would take an extremely long time to find the single optimal solution to any given real-world protected area design, but a single solution is unlikely to be the most useful. Thus, currently heuristics are preferred over exact algorithms because they provide timely solutions to complex problems and offer a range of near-optimal solutions for planners and stakeholders (Possingham et al. 2000; McDonnell et al. 2002).
Marxan can be used for a variety of purposes at different stages in the systematic conservation planning process (Table 13.1). The tool was designed primarily to help inform Stage 9: “Selecting additional conservation areas” to complement existing ones in order to achieve the conservation goals. The software identifies sets of areas that meet conservation targets for minimal “cost,” and it can be used to explore trade-offs between conservation and socioeconomic objectives. In addition, it can highlight sites that occur in a large number of solutions, which can help identify priority areas for conservation action. It can also be used to measure the achievement of targets within existing conservation areas (Stage 8) (Stewart et al. 2003) and to help prioritize conservation actions and develop management plans for selected sites (Stage 11).
Problem Formulation Using Marxan
Any conservation planning problem can be formulated as an optimization problem with the following essential elements (Moilanen et al. 2009; Possingham et al. 2001; Wilson et al. 2009):
-
1.
A clearly defined objective stating the desired outcome (e.g., maximize the number of species conserved or represent 30% of each habitat type);
-
2.
A list of features to be targeted for conservation (e.g., species, habitats, soil types);
-
3.
A list of actions (e.g., protect an area) and how these actions contribute to achieving the objective (e.g., how many species are conserved if the action is applied); and
-
4.
Financial information specifying the cost of implementing each action in a site, as well as the budget available.
Clearly defining each element helps to identify conservation priorities using the software.
Marxan uses two well-accepted approaches to identify spatial conservation priorities, minimum-set and maximal coverage, and each solves a different objective. The objective of the minimum-set strategy is to achieve the conservation objectives while minimizing the resources expended. Less commonly, Marxan is used to solve the maximal coverage strategy, which is to maximize the biodiversity benefit given a fixed budget (Possingham et al. 2006). Regardless of approach, it is essential to clearly define an objective that states the desired outcome before using the software to identify priorities (Moilanen et al. 2009; Possingham et al. 2006).
The objective function is the mathematical formulation of the minimum-set problem. In protected area design, the problem we are trying to solve is to identify the protected area system that achieves our targets and spatial requirements for the least cost. Thus, a protected area configuration is given an objective function score to measure how well it performs. In comparing alternative solutions, those with lower scores are better. Thus, the objective function is a score that we want to minimize and is calculated as follows:
Score = Cost + Boundary Length + Penalty
where costs, boundary length, and penalties are determined as below.
Cost of the protected area system. Each planning unit (parcel of land or sea) is assigned a cost that the user defines prior to planning. The cost is summed for all planning units included in a protected area system to calculate their combined cost.
Boundary length of the protected area system. One of the practical considerations for protected area design is the spatial configuration of the protected area system (i.e., a single large system or several small systems). The protected area system boundary length is measured as the sum of the planning units that share a boundary with planning units outside the protected area system. Hence, fragmented protected area systems will have a large boundary length. The objective function addresses the issue of connectivity by using the boundary length modifier (BLM) which places a value on the importance of having a more compact protected area system. The BLM is important because a system that is fragmented will likely be difficult (and costly) to manage. In addition, there are increased edge effects and reduced connectivity in a fragmented solution, potentially leading to reduced biodiversity persistence. Thus, some level of “clumping” or spatial compactness is desirable for management. The BLM is a user-defined parameter and allows you to control the amount of clumping that occurs in the solutions. With a large value for BLM, the system will be more clumped.
Penalty incurred for every feature that fails to meet its target. For each alternative solution, Marxan calculates whether the target for each conservation feature is met or not. If a target is unmet, then a user-defined penalty cost called the species penalty factor (SPF) is applied. Making the SPF user-defined allows different weightings be given to different feature targets. For example, it may be more important to achieve targets for feature A than for feature B. Alternatively, the same SPF can be applied to all conservation features (in which case, the SPF for feature A = SPF for feature B). The higher the SPF, the higher the penalty when a conservation feature target is unmet. An appropriately high SPF will result in more costly protected areas with more targets met.
More formally, the objective function is:
where PUs are the planning units, BLM is the boundary length modifier, and SPF is the species penalty factor.
Finding Optimal Solutions Using Simulated Annealing
Marxan finds near-optimal solutions to a minimum-set problem by minimizing the objective function—a lower score means a better solution to the problem. The number of possible solutions to this problem is vast, so it is usually impossible to find the optimal solution. Instead, a metaheuristic algorithm, simulated annealing, is employed to find many near-optimal solutions (Kirkpatrick et al. 1983).
The simulated annealing algorithm uses a technique borrowed from statistical mechanics to find good solutions from among this vast number of possible solutions. A large number of random changes to the protected area system are attempted, typically one million or more. At the start of the process of annealing, any change in score is accepted. As the process proceeds, the acceptance probability of bad changes is progressively reduced, until finally only good changes are accepted. A bad change is one that increases the objective function score, while a good change is one that reduces the score (Moilanen and Ball 2009). This process allows the algorithm to find solutions that are close to an exact solution.
In reality, protected area design problems have many near-optimal solutions, none of which are significantly better or worse than the optimal solution. As such, it is more useful for decision-making to identify a range of near-optimal solutions that provide diverse options for a decision-maker, rather than a single optimal solution (Kirkpatrick et al. 1983). Happily, this is the way Marxan works, generating a range of options, making it useful in the real world. Some heuristic algorithms do not explore the solution space well because they get “stuck” at a local minimum nowhere near optimal. The simulated annealing algorithm avoids this problem by taking random backward steps (or bad moves), making it a useful algorithm for the purposes of conservation planning. Simulated annealing is fast, simple, and robust to changes in the size and type of problem. These advantages allow it to explore a variety of scenarios with differing constraints and parameters while producing many good solutions. Users can also access a variety of simpler, but often faster, heuristic algorithms within Marxan. More information on simple heuristic algorithms and simulated annealing can be found in the Marxan User Manual Appendix B (Game and Grantham 2008) and in the Marxan Good Practices Handbook (Ardron et al. 2010).
Lastly, while Marxan can help find efficient solutions to spatial prioritization problems, it cannot make decisions. The software is designed to be a decision support tool. As such, Marxan solutions should be used within a larger decision-making process involving stakeholders, managers, local people, etc.
Marxan Inputs
The information Marxan needs to run must be formally organized in input files that conform to its information management system. At a minimum, the following files are needed to run Marxan:
-
Planning unit file
-
Conservation feature file (species and habitat list)
-
Planning unit versus conservation feature file
-
Boundary length file
-
Input parameter file
Examine Table 13.2 for more details on the output files from Marxan.
In Exercise 2, you will use species and habitats as conservation features for Marxan and use land acquisition cost for the planning unit costs. It is possible to use more abstract concepts for Marxan features and costs, and we illustrate some of these in the online appendix for this chapter.
Marxan Outputs
The most commonly used output includes:
-
Solution for each run
-
Summed solution
-
Missing value information
-
Summary information
Review Table 13.3 for more details on Marxan output files.
Instructions for Zonae Cogito: Marxan Graphical User Interface
Zonae Cogito (ZC) is a decision support system through which Marxan can be run in an interactive and user-friendly way. It allows users to edit and calibrate the key input files including the planning unit file, species file (SPF), boundary length modifier (BLM), as well as change parameters such as the number of runs (NUMREPS) and number of iterations (NUMITNS). It uses an open source GIS to display Marxan solutions interactively, allowing seamless interaction with Marxan inputs and outputs. ZC has two windows: a Marxan window where parameters and input files can be edited and a GIS window where spatial outputs can be viewed.
In the GIS window of ZC, you can spatially view Marxan outputs. The list of items in the Output to Map control shows all the spatial outputs you can view:
-
Selection frequency reserved zone corresponds to the summed solution output file.
-
Best solution, solution 1, etc. correspond to the solution for each run output files for each reserve system and the best reserve system (the one with the lowest objective function score).
In the Marxan drop-down menu of ZC, you can use the View Output control to view the nonspatial output tables:
-
Summary corresponds to the summary information output file.
-
Missing values bar graph corresponds to the missing value information output file for each protected area system.
-
Best solution corresponds to the missing value information output file for just the best protected area system (the one with the lowest objective function score).
ZC allows easy calibration of Marxan parameters. Calibration is the process of choosing parameters, so the software properly represents the real-world situation being analyzed. Calibration helps ensure that the protected area systems produced are close to optimal while still achieving the conservation feature targets and desired degree of clumping. If you do not calibrate the key Marxan parameters, you risk ending up with:
-
Inefficient sets of solutions
-
Inappropriate degree of clumping
-
Inefficient running time for your analysis
-
Unmet feature targets
Further reading on calibration is available in Fischer and Church (2005) and the Marxan Good Practices Handbook, Chapter 8 (Ardron et al. 2010).
A sensitivity analysis allows you to determine which input data and parameters most influence the solution. This can be important if, for example, there is a data layer with a great deal of uncertainty driving the results. In this case, you may want to remove the data layer from the analysis or use another data layer to represent the conservation feature. More information about sensitivity analysis can be found in Section 8.4 of the Marxan Good Practices Handbook (Ardron et al. 2010).
Additional Information
Additional documentation with detailed information is available on the Marxan website: (http://www.uq.edu.au/marxan/documentation). Also see the online Appendix for this chapter. Segan et al. 2011 provides more background on Zonae Cogito. Also see the user manual “Using the Zonae Cogito Decision Support System” for more technical information (Watts et al. 2010).
EXERCISE 2: Real-World Protected Area Design
Using the Zonae Cogito and Marxan software packages, you will generate and explore alternative protected area systems for Tasmania, an island state south of Australia. The provided Marxan data (Exercise2.zip) include existing protected areas, cost data (land acquisition costs), and biodiversity features (vegetation types and a single bird species) (Figure 13.1). For our purposes, the objective will be to represent 20% of the total area for each vegetation type and species in the region.

Example maps of Marxan input for Tasmania. Panel A represents the 63 vegetation types used. Panel B shows the cost surface used where darker areas are more expensive
NOTE: Be sure your instructor has fully installed the required ZC software before proceeding, following the detailed instructions provided at http://www.uq.edu.au/marxan/docs/Installing%20Zonae%20Cogito%20on%20your%20computer.pdf.You must have full write permissions (administrator privileges) in order to run the software:
-
1.
Unzip the file Exercise2.zip to your computer into a folder where you have full write permissions.
-
2.
Launch the Zonae Cogito software.
-
3.
From the folder where you have unzipped your files, load the project Exercise2.zcp with Zonae Cogito.
-
4.
In the Marxan window within the Zonae Cogito graphical user interface, navigate to the Marxan Parameter To Edit list, and locate key parameters:
-
The NUMREPS and BLM parameters are accessible directly from this drop-down menu.
-
The SPF value for each feature can be found with the SPEC parameters.
-
-
5.
Leave the NUMITNS parameter set to one million throughout the exercise. It is only necessary to increase this parameter for working with broader scale datasets than the one being used for this exercise.
-
6.
Set the NUMREPS parameter to 10 for sensitivity analysis, and set it to 100 for generating your final results. This means you will generate only 10 reserve systems for the parameter setting phase, and you will generate 100 reserve systems once your parameters for final results.
-
7.
Press the Run button on the Marxan window to compute a set of reserve systems based on your input files and parameters.
-
Q3 The targets are set at 20% of the current habitat. Try increasing the targets to 40% and then decreasing them to 10%. What effect does this have on the size and the cost of the protected area system?
-
Q4 Revisit the earlier definition and utility of the SPF value (species penalty factor). What is an appropriate SPF value to use for each biodiversity feature that ensures a reserve system will capture the targets for each? For this question, generate reserve systems ignoring spatial compactness (i.e., use a BLM of zero). What is the cost of one of your representative efficient reserve systems?
-
Q5 Consider designing different reserve systems that meet your objectives but have low, medium, and high degrees of spatial compactness. What are appropriate boundary length modifiers (BLM) values to use? Adjust the BLM, and monitor how the spatial compactness changes. As you did in Q2, plot boundary length as a function of reserve system cost for low, medium, and high degrees of spatial compactness.
Synthesis
EXERCISE 3: Stakeholder Report Based on Marxan Output
Using your results from Exercise 2, prepare a report to stakeholders in a hypothetical decision-making process that illustrates several distinct options for reserve system design in Tasmania. The target audience should include:
-
Government agencies concerned with conservation and resource use
-
Commercial organizations concerned with resource use
-
Commercial ecotourism operators concerned with exploiting the natural features of the study region for tourism
-
Nongovernment organizations concerned with protecting biodiversity in the study region
Include and discuss the following information in your report:
-
(a)
Map showing one of your final solutions (or a map showing selection frequency of your final solutions).
-
(b)
Trade-offs between planning unit cost and biodiversity protection. Find a range of SPF values or target values that illustrate this trade-off and include a trade-off curve.
-
(c)
Explain the rationale behind the degree of spatial compactness used to generate your results. Create a trade-off curve with various BLM values to help illustrate your point.
-
(d)
Read another scientific paper (or report) that uses these types of outputs, and then incorporate this study into your own report as context.
Your instructor will determine word/page limits depending on the amount of time you have to complete your assignment. Consider giving oral presentations of your results. See the online Appendix for this chapter for even more additional readings.
Notes
- 1.
NOTE: An asterisk preceding the entry indicates that it is a suggested reading.
References and Recommended Readings
NOTE: An asterisk preceding the entry indicates that it is a suggested reading.
Ardron J, Possingham HP, Klein CJ (2010) Marxan good practices handbook, Version 2. University of Queensland, St. Lucia
Ball IR, Possingham HP (2000) MARXAN (V1.8.2): marine reserve design using spatially explicit annealing, a manual. marxan.net
*Ball IR, Possingham HP, Watts M (2009) Marxan and relatives: software for spatial conservation prioritisation. In: Moilanen A, Wilson KA, Possingham HP (eds) Spatial conservation prioritisation: quantitative methods and computational tools. Oxford University Press, Oxford, pp 185–195; Chapter 14. This core Marxan reference presents a general overview, including mathematical equations for Marxan, as well as more recent developments, including Marxan with Zones, Marxan with Probability, and Marxan with Connectivity.
Ban N, Klein CJ (2009) Spatial socio-economic data as a cost in systematic marine conservation planning. Conserv Lett 2(5):206–215
*Beger M, Linke S, Watts M, Game E, Treml E, Ball IR, Possingham HP (2010) Incorporating asymmetric connectivity into spatial decision making for conservation. Conserv Lett 3(5):359–368. Describes various types of connectivity important to conservation and how they could be applied in Marxan.
*Carwardine J, Wilson KA, Watts ME, Etter A, Klein CJ, Possingham HP (2008) Avoiding costly conservation mistakes: the importance of defining actions and costs in spatial priority setting. PLoS One 3(7): e2586. Demonsrates how the explicit consideration of conservation actions and socioeconomic costs is critical to designing effective conservation plans.
Fischer DT, Church RL (2005) The SITES reserve selection system: a critical review. Environ Model Assess 10:215–228
Game ET, Grantham HS (2008) Marxan user manual: for Marxan version 1.8.10. University of Queensland, St. Lucia
*Game ET, Watts ME, Wooldridge S, Possingham HP (2008) Planning for persistence in marine reserves: a question of catastrophic importance. Ecol Appl 18(3):670–680. The first paper to apply the version of Marxan with Probability. It shows how marine reserves can be designed that achieve ecological targets whilst avoiding areas with a high chance of being destroyed by a catastrophic event, coral bleaching.
*Game ET, Lipsett-Moore G, Hamilton R, Peterson N, Kereseka J, Atu W, Watts ME, Possingham HP (2010) Informed opportunism for conservation planning in the Solomon Islands. Conserv Lett 4(1):38–46. Describes how the Lauru Land Conference of Tribal Communities and The Nature Conservancy have worked with the communities of Choiseul Province, Solomon Islands, to develop a conservation planning process that reconciles community-driven conservation opportunities, with a systematic and representation-based approach to prioritization.
Groves CR, Jensen DB, Valutis LL, Redford KH, Shaffer ML, Scott JM, Baumgartner JV, Higgins JV, Beck MW, Anderson MG (2002) Planning for biodiversity conservation: putting conservation science into practice. Bioscience 52(6):499–512
Kirkpatrick S, Gelatt CD, Vecchi MP (1983) Optimization by simulated annealing. Science 220(4598):671–680
Klein CJ, Watts ME, Kircher L, Segan D, Game ET (2007–2011) Introduction to Marxan, course manuals. marxan.net/courses
Klein CJ, Chan A, Kircher L, Cundiff A, Gardner N, Hrovat Y, Scholz A, Kendall BE, Airamé S (2008) Striking a balance between biodiversity conservation and socioeconomic viability in the design of marine protected areas. Conserv Biol 22(3):691–700
*Klein CJ, Wilson, KA, Watts, ME, Stein, J, Berry, S, Carwardine, J, Stafford-Smith, DM, Mackey B, Possingham HP (2009) Incorporating ecological and evolutionary processes into continental-scale conservation planning. Ecol Appl 19:206–217. Shows four ways of capturing ecological and evolutionary processes in Marxan, inculding identifying connected subcatchments along waterways as priorities for conservation.
*Klein CJ, Steinback, C, Watts, ME, Scholz AJ, Possingham HP (2010) Spatial marine zoning for fisheries and conservation. Front Ecol Environ 8:349–353. First paper to apply Marxan with Zones. Shows how to zone a region for four different uses relevant to fishing and conservation.
Linke S, Watts ME, Stewart R, Possingham HP (2011) Using multivariate analysis to deliver conservation planning products that align with practitioner needs. Ecography 34:203–207
*Makino A, Klein CJ, Beger M, Jupiter SD, Possingham HP (2013) Incorporating conservation zone effectiveness for protecting biodiversity in marine planning. PLoS One 8(11), e78986. Describes how to use zone effectiveness when zoning for multiple uses using Marxan with Zones.
Margules CR, Pressey RL (2000) Systematic conservation planning. Nature 405:243–253
McDonnell MD, Possingham HP, Ball IR, Cousins EA (2002) Mathematical methods for spatially cohesive reserve design. Environ Model Assess 7:107–114
Moilanen A, Ball IR (2009) Heuristic and approximate optimization methods for spatial conservation prioritization. In: Moilanen A, Wilson KA, Possingham HP (eds) Spatial conservation prioritisation: quantitative methods and computational tools. Oxford University Press, Oxford
Moilanen A, Possingham H, Wilson KA (2009) Spatial conservation prioritization: past, present, future. In: Moilanen A, Wilson KA, Possingham HP (eds) Spatial conservation prioritisation: quantitative methods and computational tools. Oxford University Press, Oxford
Possingham HP, Ball IR, Andelman S (2000) Mathematical methods for identifying representative reserve networks. In: Ferson SB (ed) Quantitative methods for conservation biology. Springer, New York
Possingham HP, Andelman SJ, Noon BR, Trombulak S, Pulliam HR (2001) Making smart conservation decisions. In: Orians G, Soule M (eds) Research priorities for conservation biology. Island Press, Washington, DC, pp 225–244
Possingham HP, Wilson KA, Andelman SJ, Vynne CH (2006) Protected areas: goals, limitations, and design. In: Groom MJ, Meffe GK, Carroll CR (eds) Principles of conservation biology. Sinauer, Sunderland
Pressey RL (2002) Classics in physical geography revisited. Prog Phys Geogr 26(3):434–441
Pressey RL, Bottrill MC (2009) Approaches to landscape- and seascape-scale conservation planning: convergence, contrasts and challenges. Oryx 43:464–475
Pressey RL, Humphries CJ, Margules CR, Vane-Wright RI, Williams PH (1993) Beyond opportunism: key principles or systematic reserve selection. Trends Ecol Evol 8:124–128
Segan DB, Game ET, Watts ME, Stewart RR, Possingham HP (2011) An interoperable decision support tool for conservation planning. Environ Model Software 26(12):1434–1441
Simberloff D (1998) Flagships, umbrellas, andkeystones: is single-species management passé in the landscape era? Biol Conserv 83(3):247–257
Soulè ME, Terborgh J (eds) (1999) Continental conservation: scientific foundations of regional reserve networks. Island Press, Washington, DC
Stewart RR, Possingham HP (2005) Efficiency, costs and trade-offs in marine reserve system design. Environ Model Assess 10:203–213
Stewart RR, Noyce T, Possingham HP (2003) Opportunity cost of ad hoc marine reserve design decisions: an example from South Australia. Mar Ecol Prog Ser 253:25–38
Watts ME, Stewart RR, Segan D, Kircher L, Possingham HP (2010) Using the zonae cogito decision support system, a manual. University of Queensland, Brisbane
Wilson KA, Carwardine J, Possingham HP (2009) Setting conservation priorities. Ann New York Acad Sci 1162:237–264
Acknowledgments
We thank Patricia Sutcliffe for reviewing the chapter for us. We also thank Ian Ball, Eddie Game, Dan Segan, and many others for their work that we have drawn on in the production of this chapter. None of this work would have been possible without financial support from our funding organizations: the Department of Sustainability, Environment, Water, Population and Communities; the Australian Research Council funded Centre of Excellence for Environmental Decisions; the National Environmental Research Program funded Environmental Decisions Hub; and the Commonwealth Scientific and Industrial Research Organisation.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer-Verlag New York
About this chapter
Cite this chapter
Watts, M.E., Stewart, R.R., Martin, T.G., Klein, C.J., Carwardine, J., Possingham, H.P. (2017). Systematic Conservation Planning with Marxan. In: Gergel, S., Turner, M. (eds) Learning Landscape Ecology. Springer, New York, NY. https://doi.org/10.1007/978-1-4939-6374-4_13
Download citation
DOI: https://doi.org/10.1007/978-1-4939-6374-4_13
Published:
Publisher Name: Springer, New York, NY
Print ISBN: 978-1-4939-6372-0
Online ISBN: 978-1-4939-6374-4
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)