
Abstract
The detection of human targets hidden by walls or rubble, trapped in buildings is of interest for rescue, surveillance and security operations. In this paper, ultra-wideband (UWB) radar and its detection application are studied. Experiments on target detection of through-wall human being are carried out in two scenarios: through-gypsum-wall, and through-wooden-door, and the UWB radar used in these experiments is PulsOn 220 in monostatic mode. Detection of through-wall human beings with the UWB radar is based on movement detection – respiratory motions and movement of body parts. So Hilbert Huang Transform (HHT) is employed as the detection technique, and the breathing information of human target is contained in the third intrinsic mode function (IMF 3). The experimental results for human target detection behind gypsum wall and wooden door are separately demonstrated.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
UWB radars, which transmit signals across a much wider frequency than conventional radar systems and are usually very difficult to detect, are used for several applications such as subsurface sensing, classification of aircrafts, collision avoidance, as well as target detection. The transmitted signal is significant for its very light power spectrum. The most common technique for generating a UWB signal is to transmit pulses with very short durations (less than 1 ns). UWB technology is favored for these applications due to its inherent property of ultra-high resolution and the ability to penetrate most of the non-metallic building materials such as bricks, wood, dry walls, concrete and reinforced concrete.
Detection of human beings with radars is based on movement detection – respiratory motions and movement of body parts. These motions cause changes in frequency, phase, amplitude and periodic differences in time-of-arrival (ToA) of scattered pulses from the target, which are result of periodic movements of the chest area of the target [8].
HHT has been employed for target detection [4, 6], which is a technique to decompose nonlinear and non-stationary signals. The IMFs which contain the micro-Doppler information can be extracted, and specifically, the respiratory infomation of human target is contained in IMF 3.
This paper focuses on the study of UWB radar for target detection, and the experiments on through-wall human being detection using HHT detection method. Due to the effect of dielectric constant of the obstacles, human target are detected through both gypsum wall and wooden door using UWB radar PulsOn 220.
The rest of this paper is organized as follows. Section 36.2 introduces the preliminary knowledge, which are UWB signal and target detection using UWB radar, the hardware equipment used in these experiments-PulsOn 220. The measurement locations are presented in Sect. 36.3, including gypsum wall and wooden door environment. Section 36.4 proposes the detection methods of HHT. Based on the presented experimental environment and target detection method, the experimental results are shown in Sect. ??, followed with the conclusion in Sect. 36.6.
2 UWB Radar for Human Detection
2.1 Ultra-Wideband (UWB) Signal
The Federal Communication Commission (FCC) defines that any wireless communication technology that produces signals with a bandwidth wider than 500 MHz or a fractional bandwidth greater than 0.2 can be considered as UWB[3], where the fractional bandwidth is defined as:
where f L and f H are the lower bond and upper bond of the spectral frequency of UWB radio.
Two types of UWB technologies are commonly used: impulse radio UWB (IR-UWB) and multiband OFDM UWB (MB-OFDM UWB). In this paper, IR-UWB technique is employed, which uses short pulses in time domain but occupies a large bandwidth in frequency domain. The most frequently used pulse is Gaussian pulse and its derivatives, i.e., first and second derivatives of Gaussian pulse, which are referred to as Gaussian Monocycle.

Principle of target detection by UWB rada

Spectrum of UWB pulse in PulsON220

UWB radar PulsON220

Gypsum wall, location of radar and Human target

Wooden wall, location of radar and Human target

IMF3 without Human target through gypsum wall

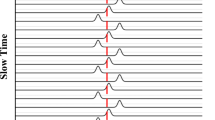
IMF3 with Human target through gypsum wall (Peaks = 4 in 18 s)

IMF3 without Human target through wooden door

IMF3 with Human target through wooden door (Peaks = 8 in 36 s)
This approach has a potential to produce signal which has higher immunity to interference effects and improved ToA resolution. Furthermore, according to electromagnetic theory, lower frequencies have better penetrating properties. The combination of larger spectrum and lower frequencies possessed by IR-UWB makes it suitable for ground penetrating radar, foliage penetrating radar and short range radar to detect hidden objects behind walls. This penetration property is also of great importance for indoor geolocation systems[1].
2.2 Target Detection Using UWB Radar
The basic principle of target detection by UWB radar is shown in Fig. 36.1. UWB radar generates and transmits short pulse through the transmit antenna TX. When the signal meets target, the part of the electromagnetic energy is reflected from the object and propagates back to receive antenna RX.
2.3 UWB Radar PulsON 220 in Monostatic Mode
In this paper, UWB radar PulsON 220 manufactured by Time Domain Corporation was used for through-wall human being detection, as shown in Fig. 36.2. The most commonly used waveforms for UWB signals are Gaussian pulses and their derivatives in time domain which are referred to as Gaussian Monocycle. PulsON 220 generates a series of first order Gaussian monopulse for short pulse transmission, which correspondingly occupies a large bandwidth in frequency domain. Figure 36.3 illustrates the spectrum of UWB pulse in PulsOn 220 with raw data rate of 9.6 MHz and center frequency of 4.3 GHz. It is noteworthy that at 9.6 MHz of data rate, the maximum unambiguous range (distance where a pulse sent/returned and the next pulse sent do not overlap) is approximately 50 ft [7].
3 Experimental Environment
When radar signals penetrate various obstacles, the attenuation rate is highly related with the qualities of the materials[5], which is mathematically a function of the dielectric constant of the materials. Metal walls are fully reflective and thus detection through such walls is impossible using radar. However, most wall materials in use are wood, concrete, glass, and stone. In this paper, the measurements were taken at two locations at University of Texas at Arlington (UTA), where the obstacles are gypsum wall and wooden door separately.
3.1 Gypsum Wall
Figure 36.4 shows the location of the radar and human target on different sides of a 1′1′′ thick Gypsum partition wall. Person is at a distance of 3.5 ft from the radar on the other side of the wall and the height of the antennas from ground is 3′4′′. Other details related to room dimensions and objects in the room can be found in Fig. 36.4.
3.2 Wooden Door
Figure 36.5 illustrates the location of the radar and Human target on different sides of a 4′′ wooden door. Person is standing at a distance of 5.5 ft from the radar on the other side of the door and the height of the antennas from ground is 3′4′′. Other details related to room dimensions and objects in the room can be found in Fig. 36.5.
4 Hilbert Huang Transform Detection Method
Breathing signature in radar response is caused by the minor (in comparison to walking) shift of body parts. These changes are extremely small for through-wall detection and certain techniques should be devised to extract these minute variations. Hilbert Huang Transform (HHT) is a technique to decompose nonlinear and non-stationary signals based on the combination of the empirical mode decomposition (EMD) and the Hilbert spectral analysis (HAS) [2, 4, 6]. The EMD identifies intrinsic oscillatory modes by their characteristic time scales in the data empirically. It separates the intrinsic mode functions (IMFs) from the original signal one by one, until the residue is monotonic. The original signal is thus decomposed into a finite and a small number of IMFs, where an IMF is any function with the same number of extrema and zero crossings, with symmetric envelopes. The flowchart of the decomposition process is described in [2]. The IMFs which contain the micro-Doppler information can be extracted and the IMFs which contain clutter and noise are discarded.
5 Experimental Results
Experiments are carried out in the two places as mentioned in Sect. 36.3 for human target detection by using UWB radar PulsOn 220. The Doppler signatures of respiration can only be seen in the IMFs, and specifically, IMF 3 contains the respiration information. Figures 36.6 and 36.7 show the experiment results of IMF 3 without and with human target through gypsum wall separately. For the case of wooden door environment, the experimental results are correspondingly illustrated in Figs. 36.8 and 36.9.
6 Conclusion
In this paper, experiments on through-wall human being detection using UWB radar are carried out in two scenarios, which are through-gypsum-wall and through-wooden-door. The equipment used to carry out the experimental work is PulsON 220 UWB radar in monostatic mode. The detection method employed in these experiments is HHT, which is based on extracting Intrinsic Mode functions (IMF) and IMF3 is the signature of breathing Doppler. By employing HHT, the existence of through-wall human target can be clearly detected, but the drawback is that the range information cannot be deduced and is ambiguous.
References
Alabacak C (2002) Analysis of ultra wideband (UWB) technology for an indoor geolocation and physiological monitoring system. Master’s Thesis, Air Force Institute of Technology
Huang NE, Shen Z, Long SR, Wu MC, Shih HH, Zheng Q, Yen NC, Tung CC, Liu HH (1998) The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. In: Proceedings of the royal society Of London series a – mathematical physical and engineering sciences, London, Great Britain, vol 454, March 1998, pp 903–995
Huseyin A, Zhining C, Benedetto D (2006) Ultra wideband wireless communication. Wiley, Hoboken, pp 10–11
Lai C-P, Ruan Q, Narayanan MR (2007) Hilbert-Huang transform (HHT) processing of through-wall noise radar data for human activity characterization. In: 2007 I.E. workshop on signal processing applications for public security and forensics, Washington D.C., USA, April 2007, pp 1–6, 11–13
Miller EL (2003) Why UWB ? A review of Ultra wideband Technology NETEX Project Office, DARPA
Narayanan MR (2008) Through-wall radar imaging using UWB noise waveforms. In: 2008 I.E. international conference on acoustics, speech and signal processing, Las Vegas, USA, March–April 2008, pp 5185–5188
Time Domain Corporation (2008) Monostatic radar (MSR) analysis tool application note
Yarovoy AG, Matuzas J, Levitas B, Ligthart LP (2009) UWB radar for human being detection. IEEE Aerosp Electr Syst Mag 23(5):36–40
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2012 Springer Science+Business Media New York
About this paper
Cite this paper
Kumar, A., Liang, Q., Li, Z., Zhang, B., Wu, X. (2012). Experimental Study of Through-Wall Human Detection by UWB Radar with Hilbert Huang Transform. In: Liang, Q., et al. Communications, Signal Processing, and Systems. Lecture Notes in Electrical Engineering, vol 202. Springer, New York, NY. https://doi.org/10.1007/978-1-4614-5803-6_36
Download citation
DOI: https://doi.org/10.1007/978-1-4614-5803-6_36
Published:
Publisher Name: Springer, New York, NY
Print ISBN: 978-1-4614-5802-9
Online ISBN: 978-1-4614-5803-6
eBook Packages: EngineeringEngineering (R0)