
Abstract
Psychopathological and psychosomatic disorders are typically diagnosed according to a standardized set of criteria that are intended to reflect stable behavioral, cognitive, and emotional processes over time. However, decades of research have indicated that time-varying psychological, biological, and social influences interact to shape the trajectory of symptoms of psychopathological and psychosomatic disorders [1–3]. Disorders that vary as a function of temporal and environmental dynamics may have meaningful dynamical structure. Dynamical structure refers to the time-variant, sinusoidal form that individual and coupled processes take across repeated observations. For example, bipolar disorder II, which is characterized by rapid cycling between manic and depressive states, displays an oscillatory pattern in the manifestation of those symptoms over time [4]. Although dynamically structured disorders are common, they are often not treated as dynamical in theory or analysis [5]. Instead, the majority of studies have relied on means-based approaches to describe symptom variation.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Psychopathological and psychosomatic disorders are typically diagnosed according to a standardized set of criteria that are intended to reflect stable behavioral, cognitive, and emotional processes over time. However, decades of research have indicated that time-varying psychological, biological, and social influences interact to shape the trajectory of symptoms of psychopathological and psychosomatic disorders [1–3]. Disorders that vary as a function of temporal and environmental dynamics may have meaningful dynamical structure. Dynamical structure refers to the time-variant, sinusoidal form that individual and coupled processes take across repeated observations. For example, bipolar disorder II, which is characterized by rapid cycling between manic and depressive states, displays an oscillatory pattern in the manifestation of those symptoms over time [4]. Although dynamically structured disorders are common, they are often not treated as dynamical in theory or analysis [5]. Instead, the majority of studies have relied on means-based approaches to describe symptom variation.
Cross-sectional designs that rely on single-occasion assessment are limited not only by the inability to detect changes in disease states over time but also by error in participant recall of stressful or emotional experiences [6, 7]. Prospective designs address those problems by repeatedly assessing specific disease symptoms or other relevant physiological or psychological processes over time, thereby increasing the reliability of measurement and, in the case of microlongitudinal designs [8–10], reducing recall bias. A prospective design is needed to detect dynamical structure, but classic approaches to analyzing prospective data, including multilevel random coefficient regression [11] and growth modeling [12], do not treat variables dynamically in as much as they do not estimate periodicity in the data. That is, in prospective studies, researchers typically evaluate the average of changes in variables over time rather than the change itself.
That distinction can be appreciated in the literature on stress and depression. The experience of stressful major life events increases the risk of developing depression in the future [13]. Depressed individuals who have experienced a higher number of severe stressors exhibit more intense depression symptoms than those with fewer severe stressors [14]. Less severe stressors that are experienced chronically may, too, predict the future onset of depression [15, 16]. At a finer grain of analysis, microlongitudinal studies allow researchers to examine processes associated with such risk predictions. In a study of patients with chronic pain, Zautra and Smith [17] employed multilevel random coefficient modeling to show that a higher number of negative life events and greater reactivity to stress in a given week resulted in elevated depression symptoms in the same week. Those results tell us that chronic stressors that challenge the individual’s capacity to respond to environmental threats are associated with depression symptoms. They do not tell us, however, the levels and duration of chronic stress required to initiate a bout of major depression. Furthermore, they do not tell us whether the dynamical structure of observations of chronic stress, such as their rate of change, meaningfully influences the experience of depression in daily life.
2 Dynamical Data
Behavior must be observed for a sufficient period of time for the dynamical structure to be revealed and reliably measured [18]. The goal in examining dynamical data is that the current state of a dependent variable is linked in some way to a previous state. That is, there is a historical quality to the data in which no particular data point is isolated from another. There are a variety of different patterns that may be exhibited. For example, some dynamical patterns may be difficult to distinguish visually from a random pattern, but data points over time are, in fact, related [19]. The focus of this chapter is on a particular type of meaningful change over time: cyclical or oscillatory motion in which fluctuations are periodic (e.g., [20–22]). To understand what such processes might look like, think of seasonal fluctuations in temperature. Temperature oscillates, more or less, with the season, although the severity of such oscillations depends on the local climate.
A general category of models called oscillator models, originally developed in physics to capture meaningful dynamical structure, is used to model cyclical motion. Psychological (e.g., negative and positive affect) and physiological (e.g., heart rate) factors can also adhere to a dynamical pattern over time as opposed to a fixed mean state. For example, circadian rhythm disorders arise when individuals go to sleep or wake up at times outside of their natural rhythm [23]. As people develop a “typical” schedule for daytime activities, be it work, exercise, or other forms of activity, sleep onset latency, time asleep, number of mid-sleep awakenings, and time awake are expected to rhythmically ebb and flow in a similar pattern from day to day [24, 25]. Disruptions to one’s “typical” schedule, such as working night shifts in an unpredictable pattern, have been shown to alter circadian rhythms, thereby compromising one’s ability to achieve quality sleep [26]. Restoration of normal circadian rhythms has been shown to improve sleep [27].
Individual differences in characteristic dynamics may also predict outcomes. For example, manic and depressive mood states that oscillate toward an equilibrium state may predict better long-term functioning than oscillations that remain sustained over time. The different characteristic dynamics from patient to patient might also be moderated by particular individual difference variables, such as genetic factors or personality styles [28–30]. Beyond examining oscillations and moderating factors, we will explore the possibility that there can be multiple interacting processes in dynamical diseases and, more generally, in psychological phenomena.
3 Differential Equations and the Damped Linear Oscillator Model
There are two types of dynamical models—difference equations and differential equations—that have been used to model rhythmic processes, like predator–prey population cycles and bimanual coordination. The defining characteristic of those two model types is the assumption of either discrete or continuous time steps. For example, the logistic map is a difference equation that bases predictions about a species’ population at the next time step (t + 1) in part on the population at a previous time step (t) [31]. In contrast, ordinary differential equations base predictions about momentary change, as captured by velocity, on knowledge of the current position. One well-known example from the dynamical literature in psychology is the Haken et al. [32] model of bimanual coordination: the change in relative phasing of the limbs (φ \( \dot{\varphi }\)) is based on both the current relative phase (φ) and the relevant control parameters, like speed and limb asymmetries (see summary in [33]). The models that are typically applied to oscillatory phenomena [29] are ordinary differential equation models that capture the relation among the measured variable (x) and the first (\( \dot{x}\)or dx t /dt) and second (\( \ddot{x}\)or d2 x t /dt 2) derivatives, that is, the change in the measured variable (velocity) and the rate of change of that change (acceleration).
The local linear approximation method is a reliable derivative estimation procedure that has been used in the modeling of oscillatory motion [20, 34, 35]. Relative to other derivative estimation procedures, which require more repeated measurements (e.g., [36]), local linear approximation can be applied to as few as three repeated measurements. In general, however, the collection of many more repeated measurements is recommended. For a variable x t , velocity at x 2 is approximated as the average of the slopes between x 1 and x 2, and x 2 and x 3. The same process is repeated across all data points in a series to get a continuous measurement of velocity. To calculate acceleration, the process is repeated with velocity as the input.
A damped linear oscillator model is an ordinary differential equation that is used to model oscillatory motion. In the damped linear oscillator model, acceleration is predicted as a function of velocity and the original variable:
.
The other terms in the model are used to characterize the nature of the oscillatory process. Zeta (ζ) is the linear damping coefficient, which represents linear changes in the amplitude of oscillations over time, and eta (η) is the squared frequency of oscillation. For a continuously oscillating process of constant amplitude (e.g., a sine wave), ζ = 0. A nonzero ζ indicates that a process is losing (ζ < 0) or gaining (ζ > 0) amplitude over time.Footnote 1 When estimated, if η is significant, then the process is oscillatory. The square root of η is the frequency of oscillation (in radians). Larger magnitudes of η are indicative of more rapid oscillation.
3.1 Oscillation in Psychological and Physical Processes
The damped linear oscillator model can function as a model of any oscillatory system. That is, the damped linear oscillator model is a model of a system’s dynamics independent of the physical substrate that generates the dynamics [37]. Psychological processes can exhibit known dynamics like oscillations that have a constant amplitude (e.g., positive and negative emotionality [22]), lose amplitude over time (e.g., emotional well-being [38]), and gain amplitude over time (e.g., adolescent drinking and smoking [20]). Oscillations in psychological processes can also exhibit faster or slower frequencies depending on the value of particular individual difference variables (e.g., psychiatric symptoms and violence [39]). Therefore, the damped linear oscillator model is well suited for modeling many psychological processes (for an early example, see [20]). The different characteristic patterns that are found in the literature can also be useful for the creation of therapy or intervention.
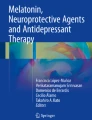
The damped linear oscillator model was originally developed to model purely physical systems such as pendular motion in which a mass swings back and forth on the end of a rod (see Fig. 8.1). If the mass is pulled to one side and released, then it will start swinging. Examples of different patterns of pendular motion are depicted in Figs. 8.2 and 8.3. Without friction, the pendulum swings continuously at a constant amplitude (ζ = 0; see Fig. 8.2a). Under more typical conditions, the pendulum slowly loses amplitude (referred to as damping; ζ < 0) and eventually comes to rest in a vertical position as a result of friction (see Fig. 8.2b). If there is a source constantly pumping energy into the pendulum (imagine a child starting a playground swing by pumping his/her legs [40]), then the pendulum gains amplitude over time (referred to as amplification; ζ > 0; see Fig. 8.2c). Pendulums tend to swing at natural frequencies that are related to their length and mass [41, 42]. Longer, heavier pendulums have slower natural frequencies (smaller η; see Fig. 8.3a) than shorter, lighter pendulums (larger η; see Fig. 8.3b). In trying to grasp the origins of meaningful patterns in psychological processes, it is helpful to consider these patterns of cyclic tendency as exemplified in known physical systems like the pendulum.

A pendulum swings back and forth along the path depicted by the dashed line

Patterns of pendular motion that can be captured using the linear damping coefficient (ζ) in oscillator models include (a) swinging at a constant amplitude, (b) losing amplitude, and (c) gaining amplitude over time

The squared frequency coefficient (η) in oscillator models can capture (a) slower and (b) faster pendular motion over time
For physical systems, there is no inclination to attribute complex behavioral patterns to cognitive mechanisms [41, 43, 44]. In contrast, in traditional cognitive psychology, complex patterns in human behavior are assumed to arise from cognitive mechanisms that historically have had no physical basis [45]. A question that arises is whether that approach results in a description of the same phenomenon at a different level (from the behavioral patterns observed to cognitive mechanisms). If so, then little is added to the understanding of the behavior. The reduction from behavioral patterns to cognitive mechanisms presents another philosophical problem. When a complex cognitive mechanism is posited to explain behavior, then one is inclined to go to an even deeper level to explain the complex cognitive mechanism. Although there have been important treatment discoveries as a result of the search for “underlying” neurobiological substrates to complex behavioral disorders, such ventures have been costly and inconsistent. With those considerations in mind, we argue that a focus on cyclic psychological processes observed through oscillator models provides an important complementary research agenda to those seeking to define the pathways from molecule to behavior. In many cases, the structure of the dynamics is also a useful predictor of relevant psychological outcomes.
In one longitudinal study, college students completed self-report measures of 24 different positive and negative emotions over 52 consecutive days [22]. Chow et al. [22] identified two positive (joy and love) and four negative (sadness, fear, anger, and shame) emotion factors to examine using a damped linear oscillator model. The data were fit with structural equation modeling, and all of the emotions exhibited sustained oscillations over time (as in Fig. 8.2a). Multilevel modeling can also be used to fit the damped linear oscillator model, producing estimates that are generally the same [21]. Fluctuations in joy and love, and sadness, fear, and shame were characterized by a 7-day cycle (e.g., from high emotion to low emotion and back again to high emotion). Anger also oscillated, but at a cycle time that was slightly faster than 7 days. Positive emotionality repeatedly peaked during the weekend and dropped sharply on Mondays, whereas negative emotionality generally peaked during the middle of the week. Those results suggest that the “blue Monday” phenomenon could be attributed to the drop in positive emotions on Mondays.
A different pattern of oscillation was observed in the emotional well-being of recently bereaved widows when they sought emotional support [38]. Participants filled out biweekly diaries about emotional well-being over a 98-day study period. In comparison to the positive and negative emotions studied in college students, well-being oscillated slowly with the loss of a spouse, lasting about 47 days per cycle (e.g., from negative emotional states to positive emotional states and back again to negative emotional states). The amplitude of those fluctuations was reduced over time in the presence of a strong support structure. This characteristic pattern of damped oscillations is depicted in Fig. 8.2b.
A broader range of characteristic patterns was identified by Odgers et al. [39] as they sought to understand individual differences in violent behavior. The criminal records of patients who visited a psychiatric hospital emergency room were used to identify individuals with a documented history of violence. Participants completed a general assessment of psychiatric symptoms each week for 26 weeks. Psychiatric symptoms generally displayed damped oscillations (as in Fig. 8.2b), although amplified oscillations (as in Fig. 8.2c) were observed in a limited number of cases. Participants with an amplified symptom pattern were more likely to be involved in serious violent incidents (e.g., physical injury; sexual assault; threat made with a weapon; and aggressive act involving a weapon) than other participants. Odgers et al. noted individual differences in the frequency of oscillations as well (between about 7–10 weeks per cycle). Participants whose psychiatric symptoms oscillated more rapidly (as in Fig. 8.3b) were more likely to be involved in any violent incident than those whose psychiatric symptoms oscillated more slowly (as in Fig. 8.3a). Those examples demonstrate how aspects of dynamical structure, not just mean levels, can predict outcomes.
Amplified oscillations have been observed in adolescent substance abuse [20]. Cigarette and alcohol use swung back and forth between periods of heavy use and periods of low use. The concerning aspect of adolescent substance abuse was that small changes in either cigarette or alcohol use were followed by amplified changes, that is, extreme fluctuations between use and nonuse. In a study of patients diagnosed with bipolar disorder II [4], patients rated their mood on a scale from most depressed to most manic twice a day for 3 months. Mood cycled over approximately 6 weeks. The patients’ mood exhibited amplified oscillations in which the amplitude of fluctuations tended to increase over time. Both adolescent substance abuse and rapid cycling bipolar disorder may, therefore, be characterized as becoming increasingly unstable over time.
The limited evidence accrued from studies that have employed damped linear oscillator models in psychology suggest that psychological processes may oscillate over time and that oscillation patterns may be differentiated by other psychological moderators. Importantly, the application of dynamical structure in such models permits an examination of hypotheses centered on the periodicity of data that cannot otherwise be made under traditional means-based analytic frameworks. There are several analytic considerations in the estimation from real data of dynamical systems models that we turn to next.
4 Multilevel Modeling: Estimating Coefficients in Oscillator Models
In the examples above, local linear approximation was used to calculate the velocity and acceleration of psychological processes [20, 34, 35]. The damped linear oscillator model [see (8.1)] can be considered as a regression equation with coefficients for damping and squared frequency [34, 35], and an error term (e t ). The typical approach is to fit the damped linear oscillator model to the data (the psychological variable and its associated derivatives) in order to obtain estimates of the damping and squared frequency coefficients. Interpretation of those estimates is generally consistent with the interpretation provided for the terms in (8.1), although caution should be observed because the interpretation can differ depending on how the model is fit [21, 29].
An appropriate method for estimating the coefficients in the damped linear oscillator model is multilevel modeling [21, 28, 29]. Multilevel modeling was developed to account for dependencies in data without violating the assumptions of common statistical techniques like ordinary least squares regression, t-tests, and between-subjects analyses of variance [21]. Longitudinal data sets take on a multilevel structure: repeated observations (Level 1 units) are nested within people (Level 2 units). Multilevel analyses permit the simultaneous modeling of within- and between-person parameters to answer questions about what happens when a particular event occurs and who is affected by the event. Such an analysis may pertain to discrete events, such as life stressors (e.g., [11]), or to periods during which a cognition, emotion, behavior, or physiological variable is elevated relative to an individual’s mean.
As repeated measurements sampled in close proximity to one another are likely to include dependencies, it is necessary to carefully evaluate the structure of the covariance matrix. Multilevel modeling is flexible in this regard, providing the user with a variety of options for accounting for autoregressive properties of nested models. For example, individuals with chronic pain tend to report at least some pain on a daily basis. The repeated measurements of pain report are typically not independent. That is, an individual’s pain report on day t typically covaries with their report on day t + 1. Such a phenomenon is considered autoregressive and requires mathematical adjustments to the covariance matrix; these adjustments are accommodated under a multilevel modeling framework (for a review, see [46]).
Another advantage of this approach is that both fixed and random effects can be estimated. This provides an opportunity to evaluate the extent to which error not accounted for in an unconditional (null) model, and presumed to be random, can be explained through the addition of theoretically relevant variables at either level of a multilevel model. In contrast, traditional ordinary least squares regression assumes that the effects being modeled are fixed and do not vary randomly in the population. For example, individuals with chronic pain may demonstrate a relation between positive affect and pain from one day to the next. A multilevel modeling approach allows one to evaluate whether the variance in that relation can be better explained through the addition of random variables that are not currently included in the model. If it is determined that the positive affect-pain relation does, in fact, randomly vary in the population, then one may choose to model other theoretically relevant variables to account for that random variation, such as optimism.
The multilevel modeling approach has been extended to account for relations observed in a dynamical context [21, 47]. In data that exhibit oscillatory structure, there are dependencies between data points over time. Oscillatory structure exhibited at an individual level is referred to as intraindividual (within person) variation in multilevel modeling. It is likely that the oscillatory structure will differ between individuals. At Level 2 of a multilevel model, we examine interindividual (between persons) variation in oscillatory structure. Individual difference variables that may account for different oscillatory patterns can also be modeled at Level 2.
Multilevel models can be represented as systems of equations that make their multilevel nature explicit. In the multilevel model of a damped linear oscillator model, the oscillatory structure (intraindividual variation) is described at Level 1,
in which velocity and displacement predict acceleration [the model in (8.1)] plus a term accounting for error in the prediction of acceleration (e tj ). The subscript j is provided in order to specify the multilevel nature of the model. A separate damped linear oscillator model is estimated for each individual j. Therefore, ζ j is the damping coefficient for the jth individual and η j is the squared frequency coefficient for the j th individual.
In order to account for interindividual variation in the damping and squared frequency terms, those terms are predicted at Level 2 of the model:
In the Level 2 equations, damping and squared frequency are expressed as a function of the average damping and squared frequency values across individuals (γ 1 and γ 2) and random error components representing error in the prediction of damping and squared frequency (u 1j and u 2 j ). The full multilevel model is fit with both the Level 1 and Level 2 terms included in the same equation (through substitution).
An important aspect of this type of multilevel modeling is the ability to account for moderation in the oscillatory structure by individual difference variables:
The Level 2 equations presented in (8.5) and (8.6) are similar to those in (8.3) and (8.4), but they include an added predictor (W j ). The utility of this approach is that a researcher can estimate the extent to which a particular psychological characteristic (W j ) influences the damping (γ 11) and squared frequency (γ 21) parameters. For example, on average, participants might exhibit damped oscillations in a behavior (see Fig. 8.2b), but depending on the value of an individual difference variable, a person in the same study could exhibit amplified oscillations (see Fig. 8.2c). Adding predictors changes the interpretation of the intercepts. They now represent average damping (γ 1) and average squared frequency (γ 2) across individuals, controlling for the average of predictor W j . Presuming that W j has predictive value, estimates of the Level 2 random error components (u 1j and u 2j ) would be expected to decrease.
The multilevel modeling approach helps to account for the effects of particular moderating variables, such as life stressors or a period of elevated emotion. Despite this feature, researchers often employ other approaches to account for moderation effects. Chow et al. [22] used a damped linear oscillator model to examine oscillation in college students’ negative and positive emotions. They observed interindividual variation in the squared frequency parameter, which suggested that individuals had different emotional cycle lengths. In their models, gender, affect intensity, extraversion, and neuroticism predicted the squared frequency of various emotions in a series of multiple regression analyses. Gender was a significant predictor of variation in the squared frequency parameter for sadness, with women displaying faster oscillations in sadness than men. Approaches such as multiple regression are popular, but they introduce new challenges to modeling. For example, the practice of pooling error into a single term in multiple regression could result in correlated errors across measurement occasions, a condition that violates the assumptions of multiple regression. In contrast, correlated error is handled appropriately in multilevel modeling [48].
5 Considering a Psychological Process in Context: Coupling
The damped linear oscillator model, fit using a multilevel model, is appropriate for modeling psychological rhythmicities [29]. The approach also allows researchers to account for individual difference variables that moderate the frequency and damping characteristics of those psychological cycles. Moderation in a dynamical model provides evidence of interaction between levels on one psychological variable and the oscillatory motion of a psychological process. It could be true, however, that oscillations in one psychological process are coupled with the oscillations of another psychological process, such that changes in amplitude and/or velocity in one variable are met with parallel or opposing changes in another variable. It is, therefore, important to consider a psychological process in the context of other psychological processes.
Research on coupling was pioneered in the area of behavioral physiology. The now classic example of coupling, first detailed by von Holst [49], is the coupling of rhythmically moving fins in decerebrated fish. In von Holst’s [49] observations, fish fins typically moved neither independently nor in an entirely fixed relation. There was a tendency for each fin to maintain its own natural frequency and a tendency for each fin to impose its natural frequency on the other fin. Coupling was manifested in a variety of ways. The net amplitude of fins coordinated together was the sum of the individual fin amplitudes in isolation. When the fins moved opposite each other, the net amplitude was lower than either of the individual fin amplitudes in isolation. The position of one fin would change suddenly at times, typically matching the position of the other fin. From a traditional perspective, one might assume that such behavioral complexity is evidence that coupling is regulated by a cognitive mechanism. Complexity in a simple system like coupled fish fins demonstrates that that need not be the case.
In practice, it may be difficult to separate the dynamics of an individual psychological process from the influence of other interacting processes. One way to understand the stability of any process is to momentarily disrupt, or perturb, it. That perturbation has a bigger effect on an unstable system than on a stable system [50–53]. Perturbations have been used effectively to explore the stability of coupling between rhythmic movements. When participants coordinated movement of the index fingers, a brief torque was introduced to one finger and relaxation time, the amount of time taken to regain stable performance following perturbation, was used as an index of stability [51, 53]. In addition to magnifying the dynamics of coupled psychological processes, perturbations could be used to clarify the dynamics of a particular psychological process [54]. For example, bereavement may be considered a perturbation that triggers oscillations between positive and negative emotionality in the well-being of recently bereaved widows [38].
Although coupled dynamics have not been investigated in the chronic pain literature, clinical research suggests that the daily experience of pain in disorders such as fibromyalgia, rheumatoid arthritis, and osteoarthritis may be altered by perturbations from a wide range of comorbid symptoms. For example, chronic pain and insomnia are highly comorbid [55] and bidirectionally related [56], and recent evidence suggests that sleep disturbance perturbs the supraspinal regulation of pain [57]. However, sleep and pain may also be coupled processes that oscillate in tandem over time. Factors that may perturb a sleep–pain system among people with comorbid chronic pain and insomnia include stress [58], altered immune processing [57], and increased symptoms of depression [59].
6 Coupled Damped Linear Oscillator Model
Coupled processes have been conceptualized as two separate but interacting damped linear oscillator models (e.g., [20, 60]). For the sake of simplicity, we present the coupled damped linear oscillator model without the multilevel modeling subscripts (Note that estimates of the coefficients can be obtained through multilevel modeling.). A more complex coupled model will be discussed later [21].
In each of the two equations, the left-hand and first right-hand terms comprise a damped linear oscillator model. Equations (8.7) and (8.8) identify a damped linear oscillator model for variable x t and variable y t , respectively. Both of the oscillators have associated linear damping (ζ x and ζ y ) and squared frequency (η x and η y ) coefficients. The oscillators are coupled to one another with the addition of coupling terms of strength κ. Each κ is given a separate subscript, representing the influence of the other oscillator; for example, κ yx is the influence of the y t oscillator on the x t oscillator. A convenient aspect of this type of modeling is that the relative influence of one process on another can be differentiated from the reverse influence because each coupling term is estimated separately [21,28].
6.1 Different Types of Coupling
Coupling has been modeled in two different ways: by making it a function of both position and velocity or by just basing it on position. Imagine two pendulums swinging from side to side that are connected by two springs ([60, 61]; see Fig. 8.4). The two springs represent the coupling components in the model, the influence of each pendulum on the other. The independent movement of each pendulum is described by the damped linear oscillators in the model. However, because the two pendulums are coupled by springs, the swinging of one pendulum influences the other pendulum to a certain degree. Figure 8.5 depicts a time series for each of the two coupled pendulums. The push and pull of each pendulum on the other generates complex changes in the position of each pendulum over time. This bidirectional influence is observed in the changes that occur in each time series from one cycle to the next. The amount of push or pull depends on the stiffness of each spring. A stiff spring (e.g., a spring-based shock absorber on a car) will transfer more influence than an elastic spring (e.g., a Slinky™). In modeling, the acceleration in one pendulum may be predicted in part by the velocity and position of the other pendulum and vice versa. In the coupled damped linear oscillator model described in (8.7) and (8.8), the velocity and position of one variable influenced the prediction of acceleration in the other variable [20, 60].

Two pendulums swing back and forth at different points in their cycles. The pendulums are coupled together through two springs so that motion of one pendulum affects motion of the other pendulum. The pendulums appear to affect each other symmetrically in this schematic depiction, but influence is likely to be asymmetric in real systems

The complex motion of two coupled pendulums (solid and dashed lines) in which the swinging of each pendulum influences and is influenced by the swinging of the other pendulum
An alternate explanation is that coupling is dependent on the sheer distance of the pendulums from each other: κ xy (η x x t – η y y t ) [21, 28]. In this conceptualization, κ changes as a function of the relative displacement of a variable from zero. The greater the displacement is from zero, the more one variable (coupled process) pulls on the other variable (coupled process). An application of this type of coupling to motor behavior will be discussed later [21]. The conceptualization of coupling a researcher chooses depends on whether coupling is expected to be a function of both velocity and position or position alone. If statistical power is a concern, then one consideration is that coupling via position alone involves fewer terms in the model.
With either conceptualization of coupling, the strength of coupling (or the stiffness of a spring linking the two pendulums) is expressed by the value of κ. When each κ is zero, the oscillators behave independently. Each pendulum swings on its own accord as if the other pendulum were not there. When a κ is nonzero, there is coupling between the oscillators. The separate κ estimates associated with each direction of influence (κ yx and κ xy ) represent the two springs connecting the pendulums. Because there are two separate κ estimates, the stiffness of each spring can vary. This variation makes different coupling relations possible [21,60]. If the κ estimates are nonzero and equal to each other (springs of equal stiffness), then there is an equal and bidirectional influence between the pendulums. If the κ estimates are nonzero and different (springs of different stiffness), then there is an asymmetric influence between oscillators. One pendulum exerts more influence on the other than vice versa. Last, if one κ = 0 and the other κ ≠ 0 (effectively, one spring between the pendulums), then there is a unidirectional influence from one oscillator to the other. In practice, differentiating between asymmetric and unidirectional coupling is a matter of statistical judgment.
6.2 Coupled Psychological Processes and Moderating Influences
There are a limited number of examples of the use of the coupled damped linear oscillator model to investigate the dynamics between psychological processes. For example, Boker and Laurenceau [60] examined the coupled dynamics of married partners’ intimacy (emotional closeness as opposed to sexual intimacy) and disclosure (sharing facts, thoughts, and feelings) by having them fill out daily diaries over 42 days. Intimacy and disclosure oscillated in a sustained fashion for both married partners with an average period of approximately 6 days. There were differences in the patterns of intimacy coupling and disclosure coupling. Intimacy coupling was bidirectional and symmetric, indicating that husband and wife intimacy influenced each other equally. Disclosure coupling, on the other hand, was unidirectional. Husband disclosure was not influenced by wife disclosure, but wife disclosure was influenced by husband disclosure.
Although exact coupling estimates were not provided in Boker and Laurenceau [60], coupling between husband and wife intimacy might follow the dynamical patterns depicted in Fig. 8.5, in which there is a bidirectional symmetric influence. Disclosure coupling, rather, would have a different graphical depiction. We have simulated that finding in Fig. 8.6, in which husband disclosure (solid line) displays oscillations of constant amplitude, uninfluenced by wife disclosure, and wife disclosure (dashed line) displays both amplified and damped oscillations, depending on the influence of husband disclosure.

A simulation of a unidirectional influence of husband disclosure (solid line) on wife disclosure (dashed line). Husband disclosure oscillates at a constant amplitude, uninfluenced by wife disclosure, whereas wife disclosure sometimes gains amplitude and sometimes loses amplitude over time, depending on husband disclosure
In another study [62], separate models were used to examine coupling between mother’s depressive symptoms, and children’s internalizing and externalizing behavior. Coupling was unidirectional, with mother’s depressive symptoms driving but not being influenced by children’s internalizing and externalizing behavior. Helm et al. [63] examined coupling between romantic partners’ physiological parameters by fitting separate coupled models for partners’ respiration and heart rate. In general, across different social interaction conditions, partners’ respiration was bidirectionally coupled. Coupling between heart rates was also observed, but the exact coupling relation differed widely across social interaction conditions. Coupling has also been explored between psychological processes exhibited by a single individual. In a 56-day daily diary study [30], participants reported levels of stress and negative affect. Both variables exhibited oscillations over the course of the study and were bidirectionally coupled. In sum, a variety of coupled oscillatory patterns have been observed both between and within individuals, which is an argument for modeling two separate coupling parameters.
The examples identified above illustrate that coupling between psychological processes is a common phenomenon. As with the damped linear oscillator model, researchers have used multilevel modeling to account for moderation in oscillatory structure by individual difference variables in the coupled model. Of particular interest with the coupled model is that Level 2 equations can be written to account for moderation in the coupling parameters [30, 60, 63]:
In the Level 2 equations, W j is the individual difference variable that is used as a predictor of the different coupling parameters (κ yx and κ xy ). A researcher can estimate how much W j influences the coupling parameters (γ 11and γ 21). The intercepts represent the average coupling influence from y t to x t (γ 1) and from x t to y t (γ 2), controlling for the average of predictor W j . Error in the prediction of the different coupling parameters is also reflected in each equation (u 1j and u 2j ).
6.3 Examples of Moderating Influences on Coupling
In three of the examples described above, specific psychological variables moderated the coupling processes. Intimacy coupling between married partners was moderated by marital satisfaction [60]. Higher marital satisfaction was associated with a stronger coupling influence from husband to wife intimacy and from wife to husband intimacy. Avoidance, anxiety, relationship satisfaction, and length of relationship were examined as moderators of coupling between physiological signals [63]. Among other significant moderating effects, when romantic partners were asked to imitate each other’s physiological signals, higher anxiety levels for either partner were associated with stronger heart rate coupling. Dispositional resilience, friend support, and family support were examined as moderators of coupling between stress and negative affect [30]. Coupling from stress to negative affect was moderated by dispositional resilience and family support. For more resilient persons and those with more family support, stress had less of an influence on negative affect.
Using the conceptualization of coupling in which κ changes as a function of the relative displacement of a variable from zero, Butner et al. [28] examined coupling between the emotional processes of romantic partners. The researchers measured participants’ positive affect, negative affect, and psychological predictors, including avoidance and anxiety. Between romantic partners, coupling was evident for positive affect but not negative affect. Higher avoidance was generally associated with less positive affect coupling. Butner et al. [28] suggest that this could result from avoidant individuals paying less attention to their partner’s emotional cues. More detailed analyses suggested that positive affect coupling relations were rather nuanced. Asymmetric coupling was typical, with male positive affect driving female positive affect. Females only drove positive affect coupling when they were low on anxiety. For males who were low on avoidance or high on anxiety, and females who were high on avoidance, positive affect coupling tended to be bidirectional and symmetric.
Precise coupling estimates were not provided in Butner et al. [28], but the three characteristic forms of coupling were simulated in Fig. 8.7. Male-driven asymmetric coupling is depicted in Fig. 8.7a: male positive affect (solid line) is unaffected by female positive affect, and female positive affect (dashed line) displays damped oscillations, depending on male positive affect. The opposite scenario is depicted in Fig. 8.7b: female positive affect is unaffected by male positive affect and male positive affect displays amplified oscillations, depending on female positive affect. Figure 8.7c depicts bidirectional symmetric coupling: a mutually dependent influence between male and female positive affect. Different patterns of results, therefore, can be captured by different coupling relations.

A simulation of positive affect coupling between male (solid lines) and female (dashed lines) romantic partners. (a) Male positive affect influences female positive affect; (b) female positive affect influences male positive affect; and (c) there can be a bidirectional influence between male and female positive affect
7 Nonlinearities in Oscillatory Motion: Escapements
The previous examples demonstrate how the dynamics of a psychological process, not just mean levels, can change under different conditions. However, when the oscillations are treated as linear, as was the case with the damped linear oscillator model (8.1) and the coupled damped linear oscillator model [(8.7) and (8.8)], the result is uniform damping or amplification effects on all data points. In reality, however, and particularly with psychological phenomena, linear systems are unusual [21, 29]. Our physical model for a nonlinear system is the grandfather clock. Grandfather clocks are wound so that a mechanism called an escapement injects energy into the clock’s pendulum to keep the pendulum moving [64]. The injection of energy is nonlinear in the sense that it occurs at a particular point in each swing of the pendulum, producing momentary changes in the amplitude and frequency of the swing. With respect to psychological processes, each particular psychological process will have its own characteristic dynamics. Those dynamics are expected to be influenced by other physical or psychological processes that interact with it and they may do so in a nonuniform manner over time. For two closely associated periodic processes, escapements are evidence of their influence on each other.
In some circumstances, use of the coupled damped linear oscillator model might oversimplify the coupling process. Before describing an alternate coupled model, we will identify how escapements are modeled. In order to capture such influences, the damped linear oscillator model (8.1) has been extended by adding nonlinear terms, creating the damped nonlinear oscillator model [65, 66]. Again, for simplicity, we present the model without the multilevel modeling subscripts:
The left-hand term (acceleration) and the first two right-hand terms (velocity and displacement) of the model constitute a damped linear oscillator model. The rest of the terms are nonlinear terms, higher order terms that are composed of the products of velocity and/or displacement: Rayleigh (ρ), van der Pol (ν), Duffing (δ), and π-mix odd (μ). Rayleigh and van der Pol are nonconservative terms, meaning that energy is pumped into or out of the system. The result is changes in amplitude (a wider pendulum swing) that are a function of velocity alone or both position and velocity, respectively. Duffing and π-mix odd are conservative terms, meaning that the total energy stays the same but frequency (how fast the pendulum swings) changes within a cycle. That change is a function of position alone or both position and velocity, respectively. Together, all of those terms capture the variety of shapes an oscillation can assume as the result of the presence of escapements.
7.1 Nonlinearities in Pain Predictions
In our previous work [29], we examined the pain prediction process for patients diagnosed with rheumatoid arthritis using the damped nonlinear oscillator model. Rheumatoid arthritis is a chronic autoimmune disease of the synovial joints characterized by disabling pain that can flare unexpectedly [67]. For patients with rheumatoid arthritis, accurate prediction of future pain can reduce the perceived averseness of a pain episode [68]. We examined whether overpredictions and underpredictions of pain (i.e., the extent to which patients predicted more or less next-day pain intensity than they actually reported experiencing on the following day) occurred systematically in an oscillating pain prediction process. Participants had an overall tendency to damp toward accurate predictions of next-day pain over the course of a month in which they recorded their data in daily diary style. The oscillation pattern was also nonlinear, suggesting that escapements influenced the pain prediction process.
We examined whether the pain prediction process varied as a function of negative affect, positive affect, and perceived control over pain. To accomplish this, we predicted the various linear and nonlinear terms as a function of those three individual difference variables. Moderation of nonlinear terms can be examined in a manner that is consistent with moderation of linear terms [see (8.5) and (8.6)] and coupling terms [see (8.9) and (8.10)]. The pain prediction process was moderated by negative affect, positive affect, and pain control. Negative affect and pain control had a nonconservative influence, with faster damping observed for participants with lower negative affect and higher pain control. In contrast, positive affect had a conservative influence, affecting the nonlinear frequency of oscillations. Participants with higher positive affect progressed more slowly, or lingered, through inaccurate pain predictions. One interpretation of these data is that positive affect is recruited during periods of pain prediction inaccuracy, possibly to serve as a buffer against the frustration that could emerge when experienced pain surpasses one’s expectation. Together, the results suggest that adaptive psychological characteristics have implications for the self-management of chronic pain. To the extent that patients may be trained to better recognize the conditions that bring about pain exacerbations and better regulate their cognitive and affective responses to pain, they may experience pain as more predictable and less stressful.
8 Coupled Nonlinear Oscillators
To the authors’ knowledge, there has been only one previous study to date [21] in which nonlinear coupling has been examined in the psychological sciences. Both nonlinearity and coupled systems are sufficiently common so as to make nonlinear coupled modeling both ecologically relevant and likely the most accurate representation of the complexity observed in real-world systems. As seen earlier, linear models and even coupled linear models have a tendency to oversimplify real-world systems with their assumptions of persistent change. The coupled damped nonlinear oscillator model is composed of two damped nonlinear oscillator models that are coupled together to allow for each oscillator to influence the other [21]. Again, estimates of each term in the coupled damped nonlinear oscillator model can be estimated through the multilevel modeling approach.
The damped nonlinear oscillators for the variables x t and y t appear in the first part of each equation. They are the linear terms, damping and squared frequency, and the complete set of nonlinear terms: Rayleigh, van der Pol, Duffing, and π-mix odd. The damped nonlinear oscillators are linked together through the coupling terms, each one representing the influence of one oscillator on the other (κ yx and κ xy ), as in (8.7) and (8.8). In the Butner et al. [21] model, coupling is represented as the difference in displacements of the two oscillators. One could also imagine using the more complex conceptualization of coupling employed by Boker and colleagues (e.g., [20, 60]).
8.1 Coupled Nonlinear Oscillators in Motor Coordination
Butner et al. [21] used a coupled damped nonlinear oscillator model to characterize a motor task in which individuals coordinated the movements of two handheld pendulums of different lengths. The shorter (faster natural frequency) pendulum was held in the right hand and the longer (slower natural frequency) pendulum was held in the left hand. Frequency estimates from the model were consistent with the frequencies calculated based on the physical characteristics of each pendulum: 0.78 Hz for the right-hand pendulum and 0.70 Hz for the left-hand pendulum. Estimates for nonconservative and conservative terms were significant for each hand, indicating that there were within-cycle variations in amplitude and frequency, respectively. Coupling was unidirectional, in which movement of the left-hand pendulum influenced but was not influenced by movement of the right-hand pendulum. Moderation of the squared frequency and coupling terms was examined by including handedness as a predictor at a higher level of the multilevel model. Consistent with the literature on the effects of handedness on bimanual coordination (e.g., [69, 70]), participants who were more right handed demonstrated a weaker coupling influence of the left hand on the right hand. This finding helps to validate the form of this coupled model for future use in the psychological literature.
8.2 Coupled Nonlinear Oscillators and the Dynamic Model of Affect
Recall that we previously observed nonlinearities in the pain prediction process for patients diagnosed with rheumatoid arthritis [29]. Those nonlinearities suggested that there were escapements or energy inputs from another process or other processes. In that research, we treated negative affect and positive affect as mean states for the sake of simplicity during that first modeling effort. However, there is evidence that variables like negative affect and positive affect display oscillatory motion. Negative affect was explored in coupled damped linear oscillator models by Montpetit et al. [30] and Butner et al. [28]. In Montpetit et al. [30], stress and negative affect exhibited coupled oscillatory motion over a 56-day time course. The strength of that coupling was reduced for both resilient persons and individuals with more family support. In Butner et al. [28], oscillations were apparent in negative affect and positive affect. There was between-partner coupling in positive affect but not negative affect, and avoidance and anxiety had moderating influences on positive affect coupling. We suggest that a logical next step is to explore the coupling of negative and positive affect oscillations within an individual and investigate how that coupling might be influenced by psychological stress or another aversive process.
The relative balance of positive and negative affect experienced by an individual at a given point in time may be dependent on the situational context. Positive and negative emotions are thought to exist and interact within an affective space [71]. A bipolar view of affective space holds that as an individual’s negative affect increases, his/her positive affect should decrease, thereby increasing the degree of correlation between the two affects in a negative direction [72]. Another conceptualization of affective space considers positive affect and negative affect as separate, bivariate dimensions existing on a three-dimensional plane whose shape can be modified by aversive perturbations to the system [73]. The latter view, known as the Dynamic Model of Affect [74], holds that it is possible, if not common, to experience affective independence rather than affective correlation when stress or other aversive states are diminished or absent. In contrast, when stress or other aversive states are present, people have greater difficulty differentiating between the two affects, resulting in an increased negative correlation.
To visualize an affective space that allows for affective differentiation, imagine a two-dimensional Cartesian space with positive affect on one axis and negative affect on the other axis. As an individual’s negative affect increases in this model, his/her positive affect may or may not change, reflecting a degree of independence between the two affects [75]. Aversive states like stress create a third dimension in the affective space and serve to contort its shape, causing the space to shrink and affect ratings to fall to opposite poles of the affective distribution. Zautra et al. [76] tested the hypothesis that stress would narrow the space between positive and negative affect in a sample of healthy workers. People were randomly alerted to provide affect and event ratings ten times per day for five consecutive days. Within-person estimates of the correlation between positive and negative affect were observed to be more negative during moments when a stressful event was reported than during non-stressful moments.
Why would stress impact the relation between positive and negative affect? Stress has been shown to increase uncertainty, which places demands on the information processing system [77]. Under such conditions, affective processing becomes limited and, consequently, positive affect and negative affect become more inversely correlated [78]. During times of acute stress, this is an adaptive process; the body must recruit energy to escape the most pertinent perceived threat, and complex affective processing consumes energy. Thus, our affective complexity diminishes in order to minimize energy expenditure, escape threat, and regain homeostatic balance. Uncertainty facilitates this process by motivating the individual to attend to the affective valence that is most closely tied to a stressor: negative affect. The individual must work considerably harder to maintain positive affect, and so it is expected to diminish during aversive states that promote uncertainty.
It may be particularly advantageous to apply the coupled nonlinear oscillator model to this type of data because of the complex dynamics of positive and negative affect and their susceptibility to systematic perturbations [73, 74, 76]. Data of the proper form for oscillator modeling are currently being collected. Conceptually, the modeling takes the following form: positive affect and negative affect, which have already been shown to oscillate [28, 30] are entered into Level 1 of the model. Coupling between those variables is conceptualized as in Butner et al. [21], as previous research identifies the importance of relative levels of positive affect and negative affect [76]. Stress has been shown to change the relation between positive and negative affect [76], and could be entered into Level 2 of a model to predict the different coupling parameters. With low stress, positive and negative affect are expected to oscillate independently. With high stress, oscillations in positive and negative affect should be coupled such that troughs in positive affect correspond to peaks in negative affect.
The coupled nonlinear oscillator model presented here is a more accurate representation of the true complexity involved in the positive and negative affect relation. An additional advantage for theory building in the Dynamic Model of Affect is that it allows us to conceptualize these processes in a fundamentally different manner. The model allows for the estimation of two different coupling terms, one reflecting the influence from positive affect to negative affect, and the other reflecting the influence from negative affect to positive affect. The dynamic coupling of affects could be unidirectional, asymmetric, or bidirectional. One might expect asymmetric coupling when stress is high, so that negative affect has a greater influence on positive affect than vice versa. Stress could also change the shape of affect oscillations through nonlinear influences. For example, high stress might result in more time being spent at both extreme high and low negative affect than in states of more desirable affect regulation. The coupling between positive and negative affect and the presence of various forms of nonlinear influence are both open research questions.
9 Conclusion
The thesis of this paper is that modeling and theory that were originally developed to describe physical processes (e.g., pendular motion) can be applied successfully to psychological processes. This strategy suggests that physical and psychological processes share relevant dynamical properties despite differences in material substrate. The oscillations that are exhibited by a variety of psychological processes, from the emotional well-being of recently bereaved widows [38, 54] to psychiatric symptoms of individuals with a documented history of violence [39], are remarkably similar to those of a simple pendulum. When pendulums are coupled by springs, then it becomes possible to accommodate additional psychological processes, such as married partners’ intimacy and disclosure [60] and romantic partners’ positive affect and negative affect [28]. The similarities between physical and psychological processes challenge traditional psychological theory by demonstrating that behavioral complexity can be displayed by simple systems characterized by the manner in which variables change and interact over time.
Notes
- 1.
Most studies have employed the damped linear oscillator model as in (8.1) with positive signs for each of the terms. Alternatively, negative signs are sometimes used for each term [21, 29]. With a negative sign for the damping coefficient (ζ), be aware that the interpretation would be opposite to the interpretation provided here.
References
Bolger N, Davis A, Rafaeli E. Diary methods: capturing life as it is lived. Annu Rev Psychol. 2003;54:579–616.
Myin-Germeys I, Oorschot M, Collip D, Lataster J, Delespaul P, van Os J. Experience sampling research in psychopathology: opening the black box of daily life. Psychol Med. 2009;39(9):1533–47.
Stone AA, Shifman S. Ecological momentary assessment (EMA) in behavioral medicine. Ann Behav Med. 1994;16(3):199–202.
Boker SM, Leibenluft E, Deboeck PR, Virk G, Postolache TT. Mood oscillations and coupling between mood and weather in patients with rapid cycling bipolar disorder. Int J Child Health Hum Dev. 2008;1(2):181–203.
Butler EA. Temporal interpersonal emotion systems: the “TIES” that form relationships. Pers Soc Psychol Rev. 2011;15(4):367–93.
Kahneman D. Objective happiness. In: Kahneman D, Diener E, Schwarz N, editors. Well-being: the foundations of Hedonic Psychology. New York: Russell Sage; 1999. p. 3–25.
Robinson MD, Clore GL. Belief and feeling: evidence for an accessibility model of emotional self-report. Psychol Bull. 2002;128(6):934–60.
Green AS, Rafaeli E, Bolger N, Shrout PE, Reis HT. Paper or plastic? Data equivalence in paper and electronic diaries. Psychol Methods. 2006;11(1):87–105.
Shiffman S, Stone AA, Hufford MR. Ecological momentary assessment. Annu Rev Clin Psychol. 2008;4:1–32.
Tennen H, Affleck G, Armeli S. Personality and daily experience revisited. J Pers. 2005;73(6):1465–83.
Nezlek JB. Multilevel random coefficient analyses of event- and interval-contingent data in social and personality psychology research. Pers Soc Psychol Bull. 2001;27(7):771–85.
Singer JD, Willett JB. Applied longitudinal data analysis: modeling change and event occurrence. New York: Oxford University Press; 2003.
Mazure CM. Life stressors as risk factors in depresion. Clin Psychol Sci Pract. 1998;5(3):291–313.
Monroe SM, Hadjiyannakis K. The social environment and depression: focusing on severe life stress. In: Gotlib IH, Hammen CL, editors. Handbook of depression. New York: Guilford Press; 2002. p. 314–40.
Hammen C. Stress and depression. Annu Rev Clin Psychol. 2005;1:293–319.
Kessler RC. The effects of stressful life events on depression. Annu Rev Psychol. 1997;48:191–214.
Zautra AJ, Smith BW. Depression and reactivity to stress in older women with rheumatoid arthritis and osteoarthritis. Psychosom Med. 2001;63(4):687–96.
Thelen E, Smith LB. A dynamic systems approach to the development of cognition and action. Cambridge, MA: MIT Press; 1996.
Gilden DL, Thornton T, Mallon MW. 1/f noise in human cognition. Science. 1995;267(5205):1837–9.
Boker SM, Graham J. A dynamical systems analysis of adolescent substance abuse. Multivar Behav Res. 1998;33(4):479–507.
Butner J, Amazeen PG, Mulvey GM. Multilevel modeling of two cyclical processes: extending differential structural equation modeling to nonlinear coupled systems. Psychol Methods. 2005;10(2):159–77.
Chow SM, Ram N, Boker SM, Fujita F, Clore G. Emotion as a thermostat: representing emotion regulation using a damped oscillator model. Emotion. 2005;5(2):208–25.
Reid KJ, Zee PC. Circadian rhythm disorders. Semin Neurol. 2004;24(3):315–25.
Ancoli-Israel S, Cole R, Alessi C, Chambers M, Moorcroft W, Pollak CP. The role of actigraphy in the study of sleep and circadian rhythms. Sleep. 2003; 26(3):342–92.
Krauchi K, Wirz-Justice A. Circadian clues to sleep onset mechanisms. Neuropsychopharmacology. 2001; 25(5 Suppl):S92–6.
Quera-Salva MA, Defrance R, Claustrat B, De Lattre J, Guilleminault C. Rapid shift in sleep time and acrophase of melatonin secretion in short shift work schedule. Sleep. 1996;19(7):539–43.
Van Someren EJ, Lijzenga C, Mirmiran M, Swaab DF. Long-term fitness training improves the circadian rest-activity rhythm in healthy elderly males. J Biol Rhythms. 1997;12(2):146–56.
Butner J, Diamond LM, Hicks AM. Attachment style and two forms of affect coregulation between romantic partners. Pers Relationship 2007;14(3):431–55.
Finan PH, Hessler EE, Amazeen PG, Butner J, Zautra AJ, Tennen H. Oscillations in daily pain prediction accuracy. Nonlinear Dynamics Psychol Life Sci. 2010;14(1):27–46.
Montpetit MA, Bergeman CS, Deboeck PR, Tiberio SS, Boker SM. Resilience-as-process: negative affect, stress, and coupled dynamical systems. Psychol Aging. 2010;25(3):631–40.
May RM. Simple mathematical models with very complicated dynamics. Nature. 1976;261:459–67.
Haken H, Kelso JA, Bunz H. A theoretical model of phase transitions in human hand movements. Biol Cybern. 1985;51(5):347–56.
Amazeen PG, Amazeen EL, Turvey MT. Breaking the reflectional symmetry of interlimb coordination dynamics. J Mot Behav. 1998;30(3):199–216.
Boker SM. Differential structural equation modeling of intraindividual variability. In: Collins LM, Sayer AG, editors. New methods for the analysis of change. Washington, DC: American Psychological Association; 2001. p. 5–27.
Boker SM, Nesselroade JR. A method for modeling the intrinsic dynamics of intraindividual variability: recovering the parameters of simulated oscillators in multi-wave panel data. Multivar Behav Res. 2002; 37(1):127–60.
Gu C. Adaptive spline smoothing in non-guassian regression models. J Am Stat Assoc. 1990;85(411): 801–7.
Kelso JAS. Dynamic patterns: the self-organization of brain and behavior. Cambridge, MA: MIT Press; 1995.
Bisconti TL, Bergeman CS, Boker SM. Emotional well-being in recently bereaved widows: a dynamical systems approach. J Gerontol B Psychol Sci Soc Sci. 2004;59(4):158–67.
Odgers CL, Mulvey EP, Skeem JL, Gardner W, Lidz CW, Schubert C. Capturing the ebb and flow of psychiatric symptoms with dynamical systems models. Am J Psychiatry. 2009;166(5):575–82.
Post AA, de Groot G, Daffertshofer A, Beek PJ. Pumping a playground swing. Mot Control. 2007; 11(2):136–50.
Kugler PN, Turvey MT. Information, natural law, and the self-assembly of rhythmic movement. Mahwah, NJ: Lawrence Erlbaum Associates; 1987.
Rosenblum LD, Turvey MT. Maintenance tendency in co-ordinated rhythmic movements: relative fluctuations and phase. Neuroscience. 1988;27(1): 289–300.
Michaels CF, Carello C. Direct perception. Englewood Cliffs, NJ: Prentice-Hall; 1981.
Solé R, Goodwin B. Signs of life: how complexity pervades biology. New York: Basic Books; 2000.
Chomsky N. Aspects of the theory of syntax. Cambridge, MA: MIT Press; 1965.
Bryk AS, Raudenbush SW. Hierarchical linear models: applications and data analysis methods. Newbury Park, CA: Sage; 1992.
Boker SM, Ghisletta P. Random coefficients models for control parameters in dynamical systems. Multilevel Model Newslett. 2001;13(1):10–7.
Luke DA. Multilevel modeling. In: Lewis-Beck MS, editor. Series: Quantitative applications in the social sciences. Thousand Oaks, CA: Sage; 2004. p. 1–79.
Von Holst E. Relative coordination as a phenomenon and as a method of analysis of central nervous system function. In: Martin R, editor. The collected papers of Erich Von Holst: the behavioral physiology of animal and man. Coral Gables, FL: University of Miami Press; 1973. p. 33–135.
Kelso JA. Phase transitions and critical behavior in human bimanual coordination. Am J Physiol. 1984; 246(6):R1000–4.
Kelso JAS, Schöner G, Scholz JP, Haken H. Phase-locked modes, phase transitions and component oscillators in biological motion. Phys Scripta. 1987;35(1): 79–87.
Post AA, Peper CE, Daffertshofer A, Beek PJ. Relative phase dynamics in perturbed interlimb coordination: stability and stochasticity. Biol Cybern. 2000; 83(5): 443–59.
Scholz JP, Kelso JA. A quantitative approach to understanding the formation and change of coordinated movement patterns. J Mot Behav. 1989;21(2): 122–44.
Boker SM. Consequences of continuity: the hunt for intrinsic properties within parameters of dynamics in psychological processes. Multivar Behav Res. 2002; 37(3):405–22.
Kelly GA, Blake C, Power CK, O’Keeffe D, Fullen BM. The association between chronic low back pain and sleep: a systematic review. Clin J Pain. 2011;27(2): 169–81.
Smith MT, Haythornthwaite JA. How do sleep disturbance and chronic pain inter-relate? Insights from the longitudinal and cognitive-behavioral clinical trials literature. Sleep Med Rev. 2004;8(2):119–32.
Smith MT, Quartana PJ, Okonkwo RM, Nasir A. Mechanisms by which sleep disturbance contributes to osteoarthritis pain: a conceptual model. Curr Pain Headache Rep. 2009;13(6):447–54.
Hamilton NA, Affleck G, Tennen H, Karlson C, Luxton D, Preacher KJ, et al. Fibromyalgia: the role of sleep in affect and in negative event reactivity and recovery. Health Psychol. 2008;27(4):490–7.
O’Brien EM, Waxenberg LB, Atchison JW, Gremillion HA, Staud RM, McCrae CS, et al. Negative mood mediates the effect of poor sleep on pain among chronic pain patients. Clin J Pain. 2010; 26(4):310–9.
Boker SM, Laurenceau J. Dynamical systems modeling: an application to the regulation of intimacy and disclosure in marriage. In: Walls TA, Schafer JL, editors. Models for intensive longitudinal data. New York: Oxford University Press; 2006. p. 195–218.
Boker SM, Laurenceau J. Coupled dynamics and mutually adaptive context. In: Little TD, Bovaird JA, Card NA, editors. Modeling contextual effects in longitudinal studies. Mahwah, NJ: Lawrence Erlbaum Associates; 2007. p. 299–324.
Nicholson JS, Deboeck PR, Farris JR, Boker SM, Borkowski JG. Maternal depressive symptomatology and child behavior: transactional relationship with simultaneous bidirectional coupling. Dev Psychol. 2011;47(5):1312–23.
Helm JL, Sbarra D, Ferrer E. Assessing cross-partner associations in physiological responses via coupled oscillator models. Emotion 2011:1–15. doi:10.1037/a0025036.
Abraham RH, Shaw CD. Dynamics: the geometry of behavior. Redwood City, CA: Addison-Wesley; 1992.
Beek PJ, Beek WJ. Tools for constructing dynamical models of rhythmic movement. Hum Movement Sci. 1988;7(2–4):301–42.
Beek PJ, Schmidt RC, Morris AW, Sim MY, Turvey MT. Linear and nonlinear stiffness and friction in biological rhythmic movements. Biol Cybern. 1995;73(6): 499–507.
Anderson KO, Bradley LA, Young LD, McDaniel LK, Wise CM. Rheumatoid arthritis: review of psychological factors related to etiology, effects, and treatment. Psychol Bull. 1985;98(2):358–87.
Rachman S, Arntz A. The overprediction and underprediction of pain. Clin Psychol Rev. 1991;11(4): 339–55.
Treffner PJ, Turvey MT. Handedness and the asymmetric dynamics of bimanual rhythmic coordination. J Exp Psychol Hum. 1995;21(2):318–33.
Treffner PJ, Turvey MT. Symmetry, broken symmetry, and handedness in bimanual coordination dynamics. Exp Brain Res. 1996;107(3):463–78.
Cacioppo JT, Gardner WL, Berntson GG. The affect system has parallel and integrative processing components: form follows function. J Pers Soc Psychol. 1999;76(5):839–55.
Russell JA, Carroll JM. On the bipolarity of positive and negative affect. Psychol Bull. 1999;125(1): 3–30.
Davis MC, Zautra AJ, Smith BW. Chronic pain, stress, and the dynamics of affective differentiation. J Pers. 2004;72(6):1133–59.
Zautra A, Smith B, Affleck G, Tennen H. Examinations of chronic pain and affect relationships: applications of a dynamic model of affect. J Consult Clin Psychol. 2001;69(5):786–95.
Ong AD, Bergeman CS, Bisconti TL, Wallace KA. Psychological resilience, positive emotions, and successful adaptation to stress in later life. J Pers Soc Psychol. 2006;91(4):730–49.
Zautra AJ, Berkhof J, Nicolson NA. Changes in affect interrelations as a function of stressful events. Cogn Emot. 2002;16(2):309–18.
Ursin H, Olff M. Psychobiology of coping and defence strategies. Neuropsychobiology. 1993;28(1–2): 66–71.
Linville PW. Self-complexity and affective extremity: don’t put all of your eggs in one cognitive basket. Soc Cogn. 1985;3(1):94–120.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer Science+Business Media New York
About this chapter
Cite this chapter
Hessler, E.E., Finan, P.H., Amazeen, P.G. (2013). Psychological Rhythmicities. In: Sturmberg, J., Martin, C. (eds) Handbook of Systems and Complexity in Health. Springer, New York, NY. https://doi.org/10.1007/978-1-4614-4998-0_8
Download citation
DOI: https://doi.org/10.1007/978-1-4614-4998-0_8
Published:
Publisher Name: Springer, New York, NY
Print ISBN: 978-1-4614-4997-3
Online ISBN: 978-1-4614-4998-0
eBook Packages: MedicineMedicine (R0)