
Abstract
Perception during active touch essentially depends on the executed exploratory movements. Humans use different movement schemes to perceive different haptic properties, the so-called exploratory procedures (EPs). The stereotypically used EPs are normally superior to other EPs in perceiving the associated property and it has been speculated that the EPs are a means of maximising pickup of the relevant sensory information. However, EPs are not always executed identically as they vary in a number of ways. For instance, the peak force and the number of fingers used during exploration are not fixed. This chapter reviews existing findings on the exploratory movement strategies that humans use in softness perception and gives an overview on how different manners of exploration affect the performance in softness tasks. It is shown that observers adapt their movement strategies depending on variations of the stimulus value and the exact conditions of the exploratory task, and that different movement parameters, e.g. the peak exploratory forces, considerably affect performance. Overall, results suggest that humans adjust their exploratory strategies to achieve the highest levels of performance in softness discrimination.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Perception is an active process during which humans purposively gather sensory information in order to obtain a representation of their environment. Haptic perception is a prime example of this principle (Gibson 1962). When humans aim to perceive their environment by touch, for example when they aim to haptically perceive an object’s softness, they first need to appropriately explore the object with the fingers. It is this exploratory movement that generates the relevant sensory information. This chapter deals with the exploratory movements that humans execute when they aim to judge an object’s compliance. Compliance is a physical correlate of perceived softness that is defined as the inverse of stiffness and can be considered a surface’s “resistance” to deformation. In the simplest case (cf. Chap. 1) it can be measured as an object’s deformation in response to an applied force, e.g. in (milli) meters per Newton.
2 Exploratory Procedures in Softness Perception
2.1 Pressure
In active touch, humans systematically use different movement schemes or patterns of contact to perceive different haptic properties: the so-called Exploratory Procedures (EPs, see Klatzky and Lederman 1999; Klatzky et al. 1989; Lederman and Klatzky 1987). For example, to perceive texture humans typically produce shear forces between an object and the skin (EP: lateral motion), or to perceive temperature humans maximize the contact area between skin and object without moving (EP: static contact). Humans stereotypically and habitually use specific EPs in association with specific properties. The EP used during compliance judgments has been called pressure:
Pressure: associated with encoding of compliance; characterized by application of forces to object (usually, normal to surface), while counterforces are exerted (by person or external support) to maintain its position; (Klatzky and Lederman 1999; p. 172)

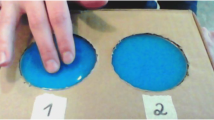
Exploratory Procedure pressure as typically executed (left side) by pressing with a single finger into an object that is supported by a table and (right side) by a pinch grip using thumb and index finger
Humans, typically, execute this EP by pressing the finger pad into the surface or by lifting the object in a pinch grip and squeezing it between thumb and index finger (Fig. 6.1). However, poking, tapping, or twisting movements can also occur (Lederman and Klatzky 1990). Often, the explored objects are pressed a number of times in succession. That is, when the fingers are in contact with the object, normal forces applied to the surface follow a pattern of increases and decreases over time (Kaim and Drewing 2011; Lederman and Klatzky 1987). Figure 6.2 shows part of the typical variation in finger forces while exploring a deformable rubber stimulus for the purpose of compliance discrimination, where only the index finger is used. In the depicted trial, after the first finger-stimulus contact, the force recorded remained at a moderate level for the following 90 ms. After this, the force increased and the finger started to deform the stimulus. In this example, there were two force maxima (ramping forces that peak) at 370 ms after first contact (maximum initial force) and 690 ms after first contact. Individuals will often make multiple indentation movements and in this experiment, another 1–2 further force maxima followed (Kaim and Drewing 2011; Exp. 1).
The stereotypical association of the EP pressure with compliance judgments, as well as the stereotypical associations between other EPs and haptic properties, has been demonstrated in several tasks. For instance, when participants have to match or sort objects according to perceived softness, they use the EP pressure, whereas they will use static contact for temperature judgments, lateral motion for texture judgments, and so on (Klatzky et al. 1989; Lederman and Klatzky 1987). Similarly, in haptic object identification, after having lifted the object, participants use the EP associated with the property that is diagnostic for the specific task; for instance, for the specific question “Is this bread a stale bread?”, compliance is diagnostic and the EP pressure is used (Lederman and Klatzky 1990). Additionally, it has been shown that the stereotypical EPs are superior to other EPs in perceiving the associated haptic property: Participants who were constrained to use a specific EP when matching objects according to a specific haptic property performed best with the EP that is stereotypically used for this property (Lederman and Klatzky 1987, Exp. 2; Lederman and Klatzky 1993). In these experiments, compliance matches obtained with the EP pressure turned out to be significantly more accurate than when using any other of the six tested EPs (pressure, static contact, lateral motion, contour following, enclosure, unsupported holding). Some information on compliance was also available using the other EPs, but the EP pressure itself tends to be highly specialized for compliance.

Part of a typical finger force variation while exploring a deformable rubber stimulus. Depicted are the force applied by the index finger to the stimulus (solid line, left ordinate) and the corresponding vertical finger position (dashed line, right ordinate). Position 0 corresponds to the stimulus surface; negative values of position represent an indentation of the stimulus. In the depicted trial, the finger contacted the stimulus ca. 1,070 ms after trial initiation. Roughly 90 ms after first contact, the force increased with time as the finger indents the stimulus. Depicted is a trial where two indentation movements have been executed with peaks at 1,400 and 1,760 ms (data from Kaim and Drewing 2011)
It is an interesting side note that the target property of a haptic exploration not only determines the executed EP, but can also be closely linked to the interpretation of the gathered sensory input. For example, when participants explore the topography of a relief-like virtual surface with the instruction to discriminate surface height in different parts of the surface, they tend to use a lateral contour following exploration combined with a constant penetration force. This has been observed to result in a misinterpretation of different compliance levels. With constant force, the transition between two areas of different compliances leads to a change in the finger’s position in the stimulus and is misreported as a height change of the surface. For instance, a transition from a harder to softer surface, while keeping indentation force constant results in deeper surface penetration, and participants report a region with a lowered surface level instead (Choi et al. 2005).
When a participant’s aim is to judge compliance, they are most successful using the EP pressure. But why does pressure enable good judgments on compliance? It has been speculated that exploratory movements are executed in a way that ‘optimizes’ the intake of the relevant sensory information and, thus, the computation of the associated property (Gibson 1962; Klatzky and Lederman 1999). Remember that compliance can be defined as an object’s deformation in response to an applied force. Pressure means that humans apply normal forces to an object while counterforces are exerted and the object is deformed. Kinaesthetic signals from muscles, tendons, and perhaps joints provide information about the finger position and finger force, while tactile signals are obtained from the mechanoreceptors in the skin of the finger pad and can provide information about the deformation of the finger-stimulus contact area (e.g., Bicchi et al. 2005). With the EP pressure, an object’s compliance can be judged from the relation between the applied or sensed forces and the sensed object deformation. That is, the EP pressure enables good judgments on compliance, because it generates crucial sensory signals and also because it generates redundant tactile and kinaesthetic signals which humans can integrate in order to assess compliance (Bergmann Tiest and Kappers 2008; Srinivasan and LaMotte 1995).
2.2 Tapping as an Instance of Pressure
So far, this section has dealt with the typical execution of the EP pressure,which is performed by pressing one or two bare fingers several times relatively slowly into an object. Humans are also able to use tapping movements in order to estimate softness (LaMotte 2000). Tapping movements are another example of the EP pressure. Tapping movements are, however, faster, briefer and less forceful than pressing movements and can be performed with the bare finger or with a tool, i.e. a stylus (Fig. 6.3).
LaMotte (2000) investigated how well humans discriminate two objects of different compliances (range: 0.2–2.2 mm/N) with tapping as compared to pressing movements, both in bare-finger and stylus conditions. They found slightly better discrimination performance with tapping than with the slower pressing movements. Friedman and colleagues (2008) asked participants to estimate the softness of a broad range of objects (compliances: 0.2–7.5 mm/N) using the method of magnitude estimation (cf. Chap. 1) and their participants’ softness estimates were comparable for bare-finger pressing and bare-finger tapping. Overall, judgments on softness are similar, independent of whether humans used tapping or pressing movements to explore the objects.
LaMotte (2000), however, also showed that different sensory signals are crucial for judging compliance when using tapping as compared to the use of pressing movements. He compared compliance discrimination when using tapping and pressing movements in active touch versus passive touch. In active conditions, participants actively moved a stylus with the finger in order to judge compliance. In contrast, in passive conditions the finger was stationary and did not move, while it received similar stimulation from the stylus as in the active conditions. As already mentioned, compliance discrimination was similar for both active tapping and active pressing. In passive conditions, however, tapping movements allowed for compliance discrimination, while pressing movements did not. This finding demonstrates that both active and passive tapping movements generate sensory signals that are not available from pressing movements. In particular, LaMotte (2000) suggested that in the fast tapping movement, the high speed contact with an object provides important information on compliance. Other authors also emphasize a potential role for these “impact tactile cues” in softness perception (Friedman et al. 2008; Lawrence et al. 2000). For a review of such findings and a discussion of the contribution of vibrotactile information see Chap. 3.

Tapping with a stylus. Here, the stylus or tool is held with two fingers and quickly tapped onto the stimulus. Tapping movements can also be executed with the bare finger. In both cases they allow for highly successful judgments of stimulus compliance
3 Parametric Variation of Exploratory Procedures and the Influence on Softness Perception
The previous section illustrates that humans typically use the EP pressure to judge an object’s compliance, and that there are different instances of this EP, namely pressing, squeezing, and tapping. There are, however, more subtle ways in which EPs differ. In particular, several studies show that participants execute the same EP with different movement parameters depending on, for example, stimulus properties or the perceptual aims of the exploratory movements (Gamzu and Ahissar 2001; Kaim and Drewing 2008; Nefs et al. 2002; Riley et al. 2002). This section deals with variations of the parameters of pressureand their influences on softness perception.
In the case of the EP pressure, participants might vary how many fingers they use, how often they indent the object, how much force they apply to the object, how fast they build-up the force, how they orient their fingers relative to the object, and so on. Also, the distinctions between the instances of the EP pressure can be described by their movement variations. Tapping and pressing movements, for example, differ in the rate of force change over time, with force changing faster in tapping than in pressing. Tapping and pressing further differ in the peak forces, which are lower in tapping (Friedman et al. 2008; LaMotte 2000).
Differences in movement parameters may affect how well humans perceive softness (i.e., applying pressure to the object leads to better softness discrimination performance than releasing it, Di Luca et al. 2011). Additionally, the relation between movement parameters and perception may be modified by characteristics of the to-be-explored stimulus, such as its compliance or the type of its surface (which can be deformable like rubber or rigid like a piano key; Srinivasan and LaMotte 1995). This section will specifically focus on movement parameters that are likely to be directly controlled for by the participant, and thus are motor parameters in a proper sense. These include force-related parameters, because the motor system directly controls the force output of the muscles (cf. Kaim and Drewing 2011) and the number of fingers being used. Note that other EP parameters, such as the finger position, are therefore better regarded as a result of controlled motor parameters and potentially provide sensory cues to an object’s compliance. For example, in softness perception, if participants have direct control of the forces exerted (which would be the case in active-touch paradigms), then the finger’s position in the object will be a function of both force and object compliance, and thus, provide a sensory cue to compliance. It is also possible that particular constrained task situations can effectively modify the roles of different EP parameters as motor parameters or sensory cues.
3.1 Peak Forces
Several studies considered how the use of different maximal or peak forces during stimulus deformation affects softness perception (cf. Fig. 6.2; Friedman et al. 2008; Tan et al. 1993). Srinivasan and LaMotte (1995) were among the first who investigated the influence of applied peak force on compliance discrimination (compliance range of stimuli: 0.2–2.2 mm/N). Participants were allowed to explore the stimuli unconstrained using their middle finger, ensuring only a single indentation, and the authors observed the use of peak forces around 1 N. Using alarm sounds, the authors constrained the participants’ peak forces to within 0.25, 0.49, 0.74 or 0.88 N. The authors observed that for stimuli with rigid surfaces (spring cells) discrimination performance clearly suffered from limiting the peak forces. Performance was also attenuated for stimuli with deformable surfaces, both when the deformable stimuli were actively explored and when they were passively pressed against the participant’s finger. Other studies add evidence to the assumption that the use of lower peak forces can result in diminished compliance discrimination for objects with deformable surfaces. Kaim and Drewing (2011) observed for less compliant rubber stimuli (0.15 mm/N), that “low” peak forces (\(\sim \)8 N) resulted in worse discrimination performance than higher forces (\(\sim \)15 N or higher). For more compliant stimuli however (1.5 mm/N), discrimination performance did not vary within the investigated range of peak forces. Nicholson et al. (1998) assessed individual Weber fractions (see Chap. 1) for objects that were even less compliant (0.08 mm/N). Participants considerably differed in their Weber fractions (range 20–6 %) and also in the peak forces that they used to judge compliance (range 80–400 N). Individuals that used lower forces had higher Weber fractions—i.e. compliance discrimination performance was worse. The influence of peak force differences on discrimination performance was smaller the higher the peak forces (Fig. 6.4). Together, the findings from the different studies show that compliance discrimination can benefit from the use of higher peak forces. They also demonstrate that the benefit decreases when peak forces increase (Kaim and Drewing 2011; Nicholson et al. 1998). A comparison across studies (Fig. 6.4) finally suggests that the more compliant the objects are, the less discrimination benefits from the use of higher peak forces.

Weber fractions as a function of compliance and peak force based on the data in Kaim and Drewing (2011); Nicholson et al. (1998) and Srinivasan and LaMotte (1995). The lines represent the best fit of curvilinear equations of the form Weber Fraction \(=\) a + b / Force, suggested by Nicholson et al. (1998). Srinivasan and LaMotte (1995) originally report percentages of correct discriminations between a standard and four comparison stimuli, which were fit to a cumulative Gaussian function using MLE methods (Wichmann and Hill 2001). All Weber fractions were standardized to correspond to 75 % discrimination thresholds. Values represent different experimental conditions (Kaim and Drewing 2011; Srinivasan and LaMotte 1995) or different individuals (Nicholson et al. 1998)
The suggested relation between peak force, discrimination performance, and object compliance level fits with observations on how participants adjust peak forces to the compliance. Studies regularly show that in unconstrained exploration, humans use higher peak forces the lower the object’s compliance (e.g. Freyberger and Färber 2006; Friedman et al. 2008; Fujita and Oyama 1999; Kaim and Drewing 2008). If the peak force that is required in order to achieve good discrimination performance increases with decreasing compliance, the use of higher peak force for less compliant objects represents a useful strategy.
The influences of peak forces and compliance level on discrimination performance can also be well explained by the generated sensory signals. It can be assumed that the deformation of an object comes along with crucial sensory signals for softness judgments. The amount of stimulus deformation caused by an applied force primarily depends on the object’s compliance: the less compliant an object is, the higher the force required to effectively deform the surface. As a consequence, in order to discriminate the softness of two less compliant objects, participants have to execute higher forces to produce the required sensory signals—i.e. to effectively and differently deform the two objects—as compared to two more compliant objects. Some authors (Fujita and Oyama 1999; Nicholson et al. 1998) further linked the sensing of an object’s deformation to the area of the deformed finger-stimulus contact region. This area increases with the applied force (Ambrosi et al. 1999; Srinivasan and LaMotte 1995), but the effect is presumably negligible with sufficiently high forces (cf. data in Nicholson et al. 1998). If, indeed, the magnitude of the contact area determines compliance discrimination, it could be expected that compliance discrimination improves with peak force up to a limit. And that the limit is lower for more compliant objects, because a maximal area of contact is achieved with lower force for more compliant objects.
For objects with rigid surfaces, Tan et al. (1995) further showed that participants discriminate compliances using “heuristic” cues that are typically correlated with compliance differences, such as the work executed during exploratory movement (=integral of force over surface displacement), rather than by precisely calculating compliance cues from the ratio between surface displacement and force. Importantly, the value of such correlates depends on the exploratory movements being executed. For example, work increases both with the applied peak force and the compliance of the object, because the surface displacement is larger for more compliant objects. As a consequence, if the compliance of two objects is discriminated using work cues, the differentiation can be successful only if the two objects are explored with similar peak forces, or if the differences in peak force are discounted. Another consequence is that higher peak forces are required to achieve work cues of similar magnitude for objects with low compliance, as compared to objects of high compliance. That is, the use of work cues is able to explain why participants apply and require higher peak forces for the discrimination of less compliant objects with rigid surfaces.
3.2 Rate of Force Change
Another movement parameter that has been occasionally discussed in the context of softness perception is the rate of force change (force/time) during object exploration. A literature review shows that the rate of force change and the peak forces that participants aim to achieve are not coupled in a consistent manner. For example, when comparing pressing to tapping movements (Friedman et al. 2008; LaMotte 2000), the higher peak forces used in pressing movements come along with decreased rates of force changes, as compared to the less forceful tapping movements. In contrast, higher peak forces applied to less compliant objects come along with increases or no reliable effect on the rate of force change (LaMotte 2000; compliances 0.19–0.78 mm/N; Friedman et al. 2008; compliances 0.21–7.59 mm/N; deformable objects).
Participants are able to deliberately choose whether they tap or press a stimulus in order to judge its compliance (Friedman et al. 2008; LaMotte 2000), which suggests that they exercise intentional control over the rate of force change. Kaim and Drewing (2008) investigations addressed whether participants intentionally adapt the rate of force change. We measured how rapidly humans approach objects in compliance discrimination (at the moment of finger-stimulus contact) when exploring virtual stimuli modeled with rigid surfaces. Finger velocity can be regarded as a correlate of the rate of force change, if it is measured before the finger deforms the object (cf. LaMotte 2000). We used stimuli of different compliance values (around 4, 10 and 21 mm/N), which were rendered with a force-feedback device. We further manipulated the predictability of the approximate compliance value: Stimuli with different compliance values were presented in different blocks (high predictability) or in random order (low predictability). When participants were able to predict the approximate compliance of the upcoming stimulus, they approached the more compliant stimuli faster than the less compliant ones. When compliance could not be predicted, approach velocity was similar for all compliance values. These results show that participants will adapt their approach velocities (and probably the rate of force change) to the expected compliance of a to-be-explored stimulus. Note that approach velocity has a link to the generation of the so-called “impact tactile cues” to softness (Friedman et al. 2008; Lawrence et al. 2000); cues that are generated during the initial surface contact.
Not much is known about how rate of force change influences discrimination performance. Friedman et al. (2008) reported that free magnitude estimates for the softness of rubber stimuli, with compliances between 0.2 and 7.5 mm/N are similar for individuals that explore with moderately different rates of force change.
3.3 Number of Fingers Used
A few studies also investigated how the number of fingers used for exploration affects compliance discrimination. Freyberger and Färber (2006) compared how well humans can discriminate compliances depending on whether they press with the index finger into an object that lies on a fixed support, versus squeezing it between the thumb and index finger while holding it with a pinch grip. They used a number of rubber stimuli of compliances ranging between 0.009 and 2.3 mm/N. Participants judged whether two stimuli felt similarly compliant. The authors report Weber fractions and differential sensitivities (d’) for compliance. Theresults are, however, ambiguous. Whereas differential sensitivities tend to indicate a better discrimination performance for the group of participants that pressed using only the index finger as compared to the group squeezing the stimuli between thumb and index finger, the results in the Weber fractions do not corroborate this interpretation.
Kaim and Drewing (2014) varied the number of fingers that were pressed into compliant objects laying on a fixed support. The objects had deformable surfaces. In the 1-finger-condition, participants were instructed to use only their index finger, in the 3-finger condition they simultaneously used the index, middle, and ring fingers and were instructed to press equally strong with each finger. Interestingly, at the beginning of the experiment, participants reported that the exploration with three finger felt “unfamiliar”, suggesting that this exploration strategy was unusual. We measured Weber fractions for lower and higher compliance rubber stimuli (0.16 and 1.3 mm/N, respectively) by combining the method of constant stimuli with a2-interval forced-choice procedure (N \(=\) 8 participants, 196 data points per individual Weber fraction; details as in Kaim and Drewing 2011; Exp. 3). In each trial participants explored a standard and a comparison stimulus, starting with the stimulus on the left side, and decided whether the left or the right stimulus was softer. They were allowed to explore each stimulus only once. There were no further constraints on the exploratory behavior.

Average Weber fractions (a) and average peak forces (b) measured while participants explore pairs of more compliant rubber stimuli (soft) or pairs of less compliant ones (hard) with one or three fingers. Error bars are standard errors. Weber fractions for the more compliant stimuli were lower for the 3-finger condition than for the 1-finger condition, \(F(1,7) = 14.0, p < .01\), but they did not significantly vary for the less compliant stimuli; the normal peak force was always higher for the 3-finger condition than for the 1-finger condition (Contact Mode, \(F(1,7) = 68.4, p < .001\), Compliance Value, \(F(1, 7) = 5.9, p< .05\), no interaction)
Participants adapted their exploratory strategy to the instructed contact mode(1 or 3 fingers), as they did for the compliance level: They applied higher peak forces in the 3-finger condition than in the 1-finger condition, and as observed previously, peak forces were higher for the less compliant as compared to the more compliant stimuli (Fig. 6.5). Due to the larger area of stimulus contact the higher forces in the 3-finger condition still resulted in less object deformation (hard: 3.9 mm, soft: 7.9 mm) compared to the lower applied forces in the 1-finger condition (hard: 5.1 mm, soft: 10.8 mm). Weber fractions were lower, i.e., discrimination performance was better for 3- finger as compared to 1-finger exploration, but only for the more compliant objects. Given that the variation of peak forces in a similar range has been previously shown to have no effect on discrimination performance for the more compliant objects (Kaim and Drewing 2011), this improvement can be explained as being due to a benefit from the additional sensory signals in the 3-finger condition. Overall, the results show that depending on the exact conditions, more fingers can lead to better compliance discrimination.
Taken together, the studies presented in this section suggest that movement parameters (e.g., peak forces, number of fingers) can influence softness perception and that humans sometimes adapt the parameters to the specific stimulus or softness task (e.g., peak force, approach velocity).
4 Strategic Adjustment of Exploratory Peak Force
Given that movement parameters appear to influence softness perception and that humans sometimes adjust these parameters to the specific stimuli, Kaim and Drewing (2011) asked whether adjustments of movement parameters are strategically used to improve softness perception. This question leads back to the claim that exploratory movements are executed in a way that optimizes the intake of the relevant sensory information (Gibson 1962; Klatzky and Lederman 1999).
Kaim and Drewing (2011) studied adjustments of peak forces in compliance discrimination and the effects of the applied peak force on discrimination performance in combination, using similar objects and tasks in three experiments. We used silicone rubber stimuli with deformable surfaces that participants explored using a bare finger, pressing their index finger downwards against the surface. The participant’s task was always to decide which of the two stimuli felt “softer”. The first two experiments focused on expectancy-driven adjustments of peak force, which can be well separated from other influences on exploratory movements. We measured the peak force for the initial indentation (cf. Fig. 6.2) of the first explored stimulus in a to-be-discriminated stimulus pair, and compared the peak forces used in predictable (expected) versus unpredictable perceptual situations.

Initial average peak forces while exploring the first object in a compliance discrimination task (Kaim and Drewing 2011; Exp. 1 and 2). Forces were higher for less compliant (hard) than for more compliant (soft) stimuli, in particular when participants were able to predict the stimulus’ approximate compliance. In addition, participants applied lower initial forces in the conditions with large compliance differences than in the conditions with small compliance differences, in the high-predictability conditions
In detail, Exp. 1 investigated whether participants adjusted their initial peak forces depending on the expected stimulus compliance. Participants either discriminated between two less compliant stimuli (0.15 vs. 0.17 mm/N) or between two more compliant stimuli (1.24 vs. 1.46 mm/N; 15 % compliance difference). Less and more compliant stimulus pairs were presented intermixed in random order (low predictability) or in separate blocks (high predictability). In blocked presentation, participants expected a particular softness of the next stimulus pair (hard or soft) and were potentially able to plan and adjust for their initial indentation movement (expectancy-driven adjustment). Such adjustment of the first movement was not possible in random presentation, in which the compliance of the next stimulus pair was not known. In this session, only feedback-based online-adjustment was possible. It turned out that participants applied higher initial peak forces to the less compliant stimuli than to the more compliant ones (Fig. 6.6, left). Peak forces, however, differed significantly only in the high-predictability conditions, in which participants were able to adjust the peak force already for the first indentation movement. An initial force difference was not significant in the low-predictability condition. Participants appeared to strategically adjust their initial exploratory forces to the expected compliance value, when possible.
In Exp. 2, we tested whether participants would also adjust their peak forces to the expected compliance difference between a pair of stimuli. Again, less and more compliant stimulus pairs were presented in low- and high-predictability conditions.In different sessions pairs with small (\(\sim \)15 %) and with large compliance differences were used (\(\sim \)75 %). The results (Fig. 6.6, right), essentially confirm that participants strategically adjust their initial exploratory forces to the expected softness. In addition, participants applied lower initial forces in the conditions with large compliance differences than in the conditions with small compliance differences. This effect was only observed in the high-predictability conditions. In the low-predictability conditions force did not significantly depend on compliance difference. These results suggest that participants also strategically adjust their initial exploratory forces to the expected compliance difference, if they can expect a certain level of compliance.
Experiment 3 assessed how the peak forces chosen in the previous experiments affected discrimination performance. It measured Weber fractions for the less and more compliant stimuli using a 2-interval-forced choice task combined with the method of constant stimuli. The targeted peak forces varied in three conditions: “lower-force”, “spontaneous-force”, and “higher-force”. At the beginning of the experiment, the “spontaneous” peak force adjustments were assessed individually for each participant using the two stimulus pairs with a small compliance difference from Exp. 1. The “lower-force” was then defined as 50 % lower than the spontaneous-force, and the “higher-force” was 50 % higher. Participants were constrained to indent each stimulus once with the prescribed force. For each indentation movement, auditory feedback signaled when participants had achieved the prescribed force.
Measured forces were slightly higher than the prescribed forces (on average by 11 %), but they differed between the force conditions as intended. Figure 6.7 depicts the Weber fractions as a function of the average peak forces in the three force conditions. For the less compliant stimuli, the Weber fractions varied with applied force. They were higher for the lower-force condition than for the other two conditions, but did not significantly differ between the “spontaneous” and the “higher-force” condition. For the more compliant stimuli, there was no distinct relationship between the applied force and the Weber fractions.

Overall, the results of the three experiments show that participants apply a higher peak force if they expect a less compliant object than if they expect a more compliant one.In addition, the applied force is adjusted to account for the compliance difference between the stimuli that are to be discriminated. Participants apply a higher force in order to discriminate between stimuli with a small, as compared to a large, compliance difference, if they expect a specific compliance value. These force adjustments relate to the differential sensitivity for compliance (assessed by the Weber fractions). Participants achieved maximal differential sensitivity for the less compliant stimuli only when applying the spontaneous or higher forces, whereas force did not matter for the more compliant stimuli. This result corroborates a perceptual explanation of the peak force adjustments to stimulus compliance. The participants’ high spontaneous forces for the less compliant stimuli represent a strategy that almost maximizes differential sensitivity for hard stimuli (relative to other forces), whereas applying high forces to the less compliant stimuli would not result in higher sensitivity, and thus, is not required. Strategically adjusting to compliance differences, however, qualifies this explanation. When expecting large compliance differences, participants lowered their peak forces, which resulted in less than the maximal differential sensitivity for the less compliant stimuli. The reduced forces, however, still allowed them to successfully discriminate the two stimuli of the pair. Kaim and Drewing (2011) estimated the probabilities of correct discriminations from the Weber fractions and found that for the large compliance difference, the probability was always \(>\)99 % for each of the three forces. For the small compliance difference and the less compliant stimuli, probabilities of correct responses were 71, 78 and 80 % (“lower-force”, “spontaneous”, and “higher-force” conditions); for the more compliant stimuli they were 86–87 %. These estimates corroborate the assumption that lower forces suffice for successful discrimination of the large compliance differences (\(>\)99 %), whereas they considerably worsen discrimination performance for the low compliance differences and less compliant stimuli. Taken together, these findings suggest that peak forces are indeed strategically adjusted to improve softness perception.
5 Conclusion
In order to perceive an object’s softness, humans use the specific exploratory movement procedure of pressure. This procedure is well suited for the intake of stimulus information that is relevant for softness perception. In addition, the procedure’s movement parameters can be strategically adjusted to a particular perceptual situation in order to improve performance.
Such strategic adjustment has at least been show for the parameter ‘peak force’. It is an important question for future research which other strategic adjustments are used in softness perception and how they interact. Other movement parameters have been shown to affect performance, such as the type of motion performed (Di Luca et al. 2011) and the number of fingers used in softness perception (Freyberger and Färber 2006), or they have been observed to be adapted by the participants, such as the rate of force change. It is less clear whether participants indeed vary the parameters to maximally improve perception. Moreover, some of these suggested relations between movement parameters and softness perception need better empirical support and only a small section of movement strategies has been studied. Kaim and Drewing (2011) have informally observed that participants prefer to lift the forearm while they explored the stimuli and that some participants hold the finger steeper against the surface of the less compliant stimuli. One may wonder whether such behavior is linked to a need for high exploratory forces for a sufficient stimulus deformation. Likewise, Drewing et al. (2011) observed that a higher number of strokes across a grating stimulus improves discrimination performance for grating parameters. One may wonder whether an analogous relation holds for the number of indentations in softness perception. So, there are still a number of open questions regarding the specific control and adaptation of the EP pressure.
Findings from haptic tasks, other than softness discrimination, corroborate the general assumption that participants are able to strategically adjust their movement parameters in order to improve haptic perception: several studies demonstrate that there are mutual dependencies between the ways in which humans explore and the precision and value of the haptic perceptual estimates (Arzamarski et al. 2010; Debats et al. 2010; Drewing 2012). Some studies directly demonstrate the link between spontaneously preferred exploratory movement parameters and good perceptual performance (Arzamarski et al. 2010; Drewing 2012; Drewing and Kaim 2009; Gamzu and Ahissar 2001). Gamzu and Ahissar (2001), for example, observed that during spontaneous exploration of haptic gratings, some of their participants reduced exploratory velocity after a few trials, and that the reduced velocity allowed for better discrimination performance than the initial higher velocity. Our own studies demonstrated that the exploratory directions relative to the body affect discrimination performance for small virtual bumps, and that participants preferred to explore along directions that were associated with superior discrimination performance (Drewing and Kaim 2009). In addition, if the exploratory direction that yields optimal performance was manipulated, participants changed their strategic preferences accordingly (Drewing 2012). It is noteworthy that all studies that demonstrate successful exploratory adjustments (Arzamarski et al. 2010; Drewing 2012; Gamzu and Ahissar 2001) also show that these adjustments require sufficient experience with the perceptual situation.
Optimal adjustments might sometimes represent a costly strategy. In the case of the high peak forces used to improve softness discrimination, the study of Kaim and Drewing (2011) showed that this exhausting strategy is only used if a high level of differential sensitivity is required. Strategic adaptations of exploratory forces aimed for high levels of performance in the discrimination task, rather than for perceptual optimization. Similarly, in the study showing that a higher number of strokes improved grating discrimination up to a maximum performance for 6–7 strokes (Drewing et al. 2011), the spontaneously preferred number of strokes was slightly below 6, resulting in close-to-optimal performance while keeping motor costs low. A recent study (Saig et al. 2012) investigated a simplified haptic task, in which participants discriminated object positions using a whisker in either hand, and presents a model on how sensory information is accumulated over time while motor costs are minimized. An interesting question for future research is how motor costs and perceptual benefits of haptic optimization strategies are balanced in natural haptic tasks.
References
Ambrosi G, Bicchi A, Rossi DD, Scilingo EP (1999) The role of contact area spread rate in haptic discrimination of softness. In: Proceedings IEEE international conference on robotics and automation, pp 305–310
Arzamarski R, Isenhower RW, Kay BA, Turvey MT, Michaels CF (2010) Effects of intention and learning on attention to information in dynamic touch. Atten Percept Psychophys 72:721–735
Bergmann Tiest WM, Kappers AML (2008) Kinesthetic and cutaneous contributions to the perception of compressibility. In: Ferre M (ed) Haptics: perception, devices and scenarios. Lecture notes in computer science, vol 5024. Springer, Heidelberg, pp 255–264
Bicchi A, Scilingo E, Dente D, Sgambelluri N (2005) Tactile flow and haptic discrimination of softness in multi-point interaction with real and virtual objects. In: Barbagli F, Prattichizzo D, Salisbury K (eds) Series STAR: Springer tracts in advanced robotics, vol 18. Springer, Heidelberg, pp 165–176
Choi S, Walker L, Tan HZ, Crittenden S, Reifenberger R (2005) Force constancy and its effect on haptic perception of virtual surfaces. ACM Trans Appl Percept 2:89–105
Debats NB, van de Langenberg RW, Kingma I, Smeets JBJ, Beek PB (2010) Exploratory movements determine cue weighting in haptic length perception of handheld rods. J Neurophysiol 104:2821–2830
Di Luca M, Knorlein B, Ernst MO, Harders M (2011) Effects of visual-haptic asynchronies and loading-unloading movements on compliance perception. Brain Res Bull 85(5):245–259
Drewing K, Kaim L (2009) Haptic shape perception from force and position signals varies with exploratory movement direction and the exploring finger. Atten Percept Psychophys 71:1174–1184
Drewing K (2012) After experience with the task humans actively optimize shape discrimination in touch by utilizing effects of exploratory movement direction. Acta Psychol 141:295–303
Drewing K, Lezkan A, Ludwig S (2011) Texture discrimination in active touch: effects of the extension of the exploration and their exploitation. In: Basodogan C, Choi S, Harders M, Jones L, Yokokohji Y (eds) Conference proceedings: IEEE World haptics conference 2011, The Institute of Electrical and Electronics Engineers (IEEE) Catalog number CFP11365-USB, pp 215–220
Freyberger FKB, Färber B (2006) Compliance discrimination of deformable objects by squeezing with one and two fingers. Proceedings of eurohaptics, Paris, France, pp 271–276
Friedman RM, Hester KD, Green BG, LaMotte RH (2008) Magnitude estimation of softness. Exp Brain Res 191:133–142
Fujita K, Oyama Y (1999) Control strategies in human pinch motion to detect the hardness of an object. IEEE SMC ’99 Conference proceedings, vol 2
Gamzu E, Ahissar E (2001) Importance of temporal cues for tactile spatial-frequency discrimination. J Neurosci 21:7416–7427
Gibson JJ (1962) Observations on active touch. Psychol Rev 69:477–490
Kaim L, Drewing K (2008) Exploratory movement parameters vary with stimulus stiffness. In: Ferre M (ed) Haptics: perception, devices and scenarios. Lecture notes in computer science, vol 5024. Springer: Heidelberg, pp 313–318
Kaim L, Drewing K (2011) Exploratory strategies in haptic softness discrimination are tuned to achieve high levels of task performance. IEEE Trans Haptics 4:242–252
Kaim L, Drewing K (2014) Haptic softness discrimination of deformable objects by pressing with one or three fingers (unpublished raw data)
Klatzky RL, Lederman SJ (1999) The haptic glance: a route to rapid object identification and manipulation. In: Gopher D, Koriat A (eds) Attention and performance XVII: cognitive regulation of performance: interaction of theory and application. Erlbaum, Mahwah, pp 165–196
Klatzky RL, Lederman SJ, Reed CL (1989) Haptic integration of object properties: texture, hardness, and planar contour. J Exp Psychol Hum Percept Perform 15:45–57
LaMotte RH (2000) Softness discrimination with a tool. J Neurophysiol 83:1777–1786
Lawrence DA, Pao LY, Dougherty AM, Salada MA, Pavlou Y (2000) Rate-hardness: a new performance metric for haptic interfaces. IEEE Trans Robot Autom 16:357–371
Lederman SJ, Klatzky RL (1987) Hand movements: a window into haptic object recognition. Cogn Psychol 19:342–368
Lederman SJ, Klatzky RL (1990) Haptic classification of common objects: knowledge-driven exploration. Cogn Psychol 22:421–459
Lederman SJ, Klatzky RL (1993) Extracting object properties through haptic exploration. Acta Psychol 84:29–40
Nefs HT, Kappers AML, Koenderink JJ (2002) Frequency discrimination between and within line gratings by dynamic touch. Percept Psychophys 64:969–980
Nicholson LL, Maher CG, Adams RD (1998) Hand contact area, force applied and early non-linear stiffness (toe) in manual stiffness discrimination task. Manual Therapy 3:212–219
Riley MA, Wagman JB, Santana M, Carello C, Turvey MT (2002) Perceptual behavior: recurrence analysis of a haptic exploratory procedure. Perception 31:481–510
Saig A, Gordon G, Assa E, Arieli A, Ahissar E (2012) Motor-sensory confluence in tactile perception. J Neurosci 32(40):14022–14032
Srinivasan MA, LaMotte RH (1995) Tactual discrimination of softness. J Neurophysiol 73:88–101
Tan HZ, Durlach NI, Beauregard GL, Srinivasan MA (1995) Manual discrimination of compliance using active pinch grasp: the role of force and work and cues. Percept Psychophys 57:495–510
Tan HZ, Durlach NI, Shao Y, Wei M (1993) Manual resolution of compliance when work and force cues are minimized. In: Kazerooni H, Colgate JE, Adelstein B (eds) Advances in robotics, mechatronics, and haptic interfaces, vol 49. ASME, New Orleans, pp. 99–104
[Wichmann and HillWichmann and Hill2001]bib33 Wichmann FA, Hill NJ (2001) The psychometric function: I. Fitting, sampling and goodness-of-fit. Percept Psychophys 63: 1293–1313
Acknowledgments
I wish to thank two anonymous reviewers and Alexandra Lezkan for their helpful criticisms, suggestions, and comments on an earlier draft, and Steven A. Cholewiak for native-speaker advice.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer-Verlag London
About this chapter
Cite this chapter
Drewing, K. (2014). Exploratory Movement Strategies in Softness Perception. In: Di Luca, M. (eds) Multisensory Softness. Springer Series on Touch and Haptic Systems. Springer, London. https://doi.org/10.1007/978-1-4471-6533-0_6
Download citation
DOI: https://doi.org/10.1007/978-1-4471-6533-0_6
Published:
Publisher Name: Springer, London
Print ISBN: 978-1-4471-6532-3
Online ISBN: 978-1-4471-6533-0
eBook Packages: Computer ScienceComputer Science (R0)