
Abstract
The operation of future electricity grids will have a multi-disciplinary nature via the merging of energy and communication infrastructures, and the interaction of state-of-the-art technologies such as power electronics, computational intelligence, signal processing, or smart metering. This interoperability presents challenges to optimize system performance by improving synergy between actors, i.e., producers, consumers, and network operators. This chapter tackles a part of these challenges by focusing on the role of power electronics in smart grids. First, background information of emerging distribution systems, evolutionary changes, and enabling technologies is presented. Furthermore, a requirement of electronic-based interface systems with smart topologies and controls is explained. Finally, applications of smart interface systems are expounded via three examples: (1) smart inverters, (2) smart power router, and (3) virtual synchronous generator.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others
Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
13.1 Introduction to Emerging Distribution Systems
Worldwide, electric power grids are transforming toward varied levels of modernization at the start of the twenty-first century. Drivers for such transformations include: the need for enhanced reliability and power quality to serve the advanced loads of the new century; accommodation of projected growth in demand levels; and integration of ‘cleaner’/‘greener’ sources of electricity generation and storage. In order to achieve this modernization, governmental mandates such as the Smart Grid Initiative (SGI) in the USA and European Electricity Grid Initiative in (EEGI) in Europe have been introduced. The popular phrase, Smart Grid, which is used as an umbrella term to describe the emerging modernized power grid, promulgates the use of technologies from the control and communications field to greater extent in the power grid so as to achieve greater efficiency in operation and resiliency in the grid. In other words, the Smart Grid may be loosely defined as an emerging electricity infrastructure that possesses bidirectional flow of electric power and digital information. Based on current worldwide trends in lowered transmission investments, coupled with retirement of assets at the transmission level, it is expected that the Smart Grid will evolve at the distribution levels of the electric grid. An imperative for such an evolution is the integration of flexible and intelligent power electronic devices, across various levels, at the distribution system. In this chapter, an overview of power electronics for emerging distribution systems along with some examples is provided.
13.1.1 Policies and Standards for the Smart Grid
Globally, efforts are underway to address the needs for sustainable, clean, and secure energy for the future—i.e., the development of a Smart Grid. In order to realize a Smart Grid, it is necessary for legislative policies and regulations to be in place. For example, a Smart Grid project sponsored by the Federal Energy Regulatory Commission (FERC) and the National Association of Regulatory Utility Commissions (NARUC) in the USA is providing the forum for state and federal regulators to discuss issues and make recommendations for state and federal policies to support the Smart Grid development. Grid 2030, the US DOE’s long-term vision for the twenty-first century electric infrastructure also calls for introduction of smart controls and appliances to the existing grid [1]. Some other projects in the US include the Electric Power Research Institute (EPRI) IntelliGrid initiative, which has developed a utility-centric technical project framework and engaged in pilot implementations, the Department of Energy (DOE). Modern Grid Initiative efforts to enable and accelerate grid modernization, including providing analytic support, the Grid Wise Alliance which is a coalition of utilities, technology vendors, and others. Figure 13.1 shows the numerous groups involved in Smart Grid initiatives where policy and regulation at federal, state, and private levels are listed as a function of the vision, systems integration, and technology developments.

Selected federal, state, and private smart grid initiatives in the USA (Courtesy: E. Lightner, ENERNEX [2])
The Energy Independence and Security Act of 2007 (EISA07) passed by the 110th U.S. Congress included the Smart Grid Initiative, which is the official policy of the United States to modernize the electricity grid [3]. A document titled “A Policy Framework for the twenty-first Century Grid: Enabling our Energy Future,” [4], has established a policy framework based on four pillars for a Smart Grid—(1) enabling cost-effective Smart Grid investments; (2) unlocking the potential of innovation in the electric sector; (3) empowering consumers and enabling informed decision making; and (4) securing the grid from cyber-security threats, and which will support key aspects of the transition to a smarter grid and a clean energy future. The American Reinvestment and Recovery Act of 2009 (ARRA09) enacted by the 111th US Congress provides several billions of dollars for investment in the Smart Grid [5]; Fig. 13.2 depicts a histogram of the allocation of Smart Grid projects in the USA as of June [6].

A pie chart of the distribution of various smart grid PROJECTS in the US (as of Jun 2011) according to project type (Figure generated with data from www.SGIClearingHouse.Org)
On a global scale, the International Panel on Climate Change (IPCC) Working Group III’s Special Report on Renewable Energy (RE) Sources and Climate Change Mitigation (SRREN) presents an assessment of the literature on the scientific, technological, environmental, economic, and social aspects of the contribution of six renewable energy sources aimed at mitigating the effects of climate change [7]. It is intended to provide policy relevant information to governments, intergovernmental processes, and other interested entities.
As an enabling technology, power electronics has the ability to provide effective and intelligent solutions for the grid of the future; however, the complexity and interaction of the dispersed assets in an emerging distribution system is nontrivial and requires interoperability and compliance with standard procedures. In that regard, in the US, the National Institute of Standards and Technology (NIST), which has been assigned the role of a national coordinator for Smart Grid interoperability standards, released a framework and roadmap for interoperability standards in January 2010 [8]. In September 2011, the Institute of Electrical and Electronics Engineers (IEEE) developed the Standard 2030 guide for “Smart Grid interoperability of energy technology and information technology operation with the electric power system, and end-user applications, and loads” [9]. The International Electrotechnical Commission (IEC) has identified over 100 standards from its repertoire as relevant to the Smart Grid [10]. Interoperability promises the plug-and-play feature of the various devices and assets that may synergistically form the Smart Grid. It is necessary that evolving power electronics adhere to such interoperability standards for controls and communications purposes.
13.2 Evolutionary Changes and Enabling Technologies
In this section, the evolutionary changes that are anticipated on legacy distribution systems, and the associated enabling technologies are presented.
13.2.1 Evolution of a Smart Distribution System
Based on the expectations of the Smart Grid Initiative and relevant supporting documents, a survey for identifying the characteristics of a smart distribution system was performed [11].
The major findings from the survey in [12] indicates that an evolving smart distribution system:
-
1.
Will avail of enabling features such as real-time pricing, Automated Metering Infrastructure (AMI), two-way communicating devices, and networked connections between feeders for optimizing distributed assets.
-
2.
Will possess integrated Distributed Energy Resources (DER) at all distribution voltage levels capable of with two-way communications with the service provider via a smart meter, a local energy management system, and with other DERs at the rate of at least once per minute. It is expected that renewable energy sources will make up at least 10–19 % of the total generation, of which less than 50 % of the new DERs will be met by renewable sources. The new DERs will be supported by battery storage and fast-starting dispatchable generation sources. Distributed Storage (DS), primarily batteries will comprise less than 50 % of rated load for up to four hours, and are expected to support up to 50 % of nondispatchable DER.
-
3.
Will be characterized by massively deployed sensors and smart meters that will engage in two-way meshed communications and be enabled with control algorithms to automatically react to measurements.
-
4.
Will provide avenues for consumer participation in Demand Response (DR) through the widespread use of dynamic pricing, with real-time signals.
-
5.
Will use adaptive and self-healing technologies primarily integrated at the 15 kV class. Smart feeders will be responsible for self-healing actions and will be enabled by digital feeder automation capable of communications.
-
6.
Will utilize advanced tools (including visualization, analysis, and simulation) to streamline routine operations.
-
7.
Will possess smart appliances and consumer devices that are two-way communication enabled and controllable.
-
8.
Will have the ability to operate in either intentionally islanded or grid-connected mode [12].
13.2.2 Operation and Management Philosophies
As indicated in the previous subsection, the evolving smart distribution grid is projected to have increased levels of RE sources and other assets, hitherto not seen on the legacy distribution system. This infrastructural change is inherently dispersed and calls for provision of timely information on system states and parameters to the various entities engaged in operation and management (O and M) services. The dispersed nature of the emerging distribution gird also introduces scenarios where different O and M service providers may be present in different locations with different expectations and goals. As a result, O and M surfaces as an important aspect of the Smart distribution grid that must take into account the various interactions between entities such as local energy management systems (LEMS), the Distribution Management System (DMS), the utility Supervisory Control And Data Acquisition (SCADA) system and possibly any newly emerging Balancing Authorities (BA), and Power Exchange (PX) markets for distribution systems. It is not inconceivable to envision a distribution system aggregator that sends out price and control signals through the system and charged with the task of balancing the system, much like in contemporary bulk (transmission) power systems. This is more relevant when intentional islanding of distribution systems becomes an accepted practice.
At the end-user level, it is expected that dedicated service providers will provide O and M services; relevant information may be accessed bidirectionally through the Smart meter as a portal. The end-user LEMS may either use software supplied by enterprises or use the portal software provided by the local distribution utility for purposes of communications. The communication network itself could use a variety of the following secure choices: cellular protocols, Home Area Networks (HAN), WiFi, Wireless mesh networks, Zigbee, Internet, Broadband over Power Lines (BPL), or Fiber-optic [12]. Schedulable home appliances provide the ability to control/cycle them during DR actions [13]. In commercial and industrial loads, the variability in loads is not as dramatic as in the loads of the residential sector, hence the advent of pervasive controls for O and M purposes in the commercial and industrial sectors of the distribution system may not be as profound. Regardless, it is possible that in the coming years, public concern over privacy may introduce litigations against utilities and/or distribution service providers. This may force the utilities and distribution service providers to adopt a rigorous method of authenticating O and M services for the end-user.
As the transportation fleet undergoes transformation into a partially electric fleet, new O and M requirements for electric vehicle management will be required. This could include: vehicle identity registration systems with the utility or DMS; utility or DMS interactions with financial institutions such as credit card companies; utility or DMS interactions parking structure owners who offer electric vehicle recharging and discharging services; and the possible use of registering the vehicles in a DR or energy conservation program.
As end-users being to generate electricity and back feed to the grid, it will be required that they meet the technical requirements of appropriate standards for connecting distributed generation to the grid, such as the IEEE 1547 and UL 1741 [14, 15]. Additionally it will be required to identify and register the devices with the utility, which likely will involve the ability to install a digital certificate on the participating devices—this opens another avenue of new products, services, and markets, as mandated by the SGI.
Increased levels of asset integration will require advanced management of assets and demand through smart metering technologies. M2M (Machine-to-Machine) Interfaces may replace some Human–Machine Interface (HMI) solutions, thus accelerating the deployment of increasingly sophisticated automatic control systems. All of the above O and M aspects must be incorporated into the control algorithms of the front end of the various power electronics devices that will interface the assets to the emerging distribution grid.
13.2.3 Services
As smart distribution systems emerge on the grid, it is expected that the existing and new assets such as DG, distributed energy storage (DES) units will be adaptable for provision of not only primary service, i.e., supply of electricity, but also a portfolio of ancillary services. It is easy to envision that the provision of such diverse services from the same asset will require power electronics front end, for these assets that are inherently capable of functioning in multiple quadrants. Some of the ancillary services that could be made available from assets with power electronics front ends include:
-
Voltage regulation
-
Frequency regulation
-
Provision of spinning reserves and standby service
-
Power quality enhancement
-
Power factor correction
-
Instantaneous power compensation during load transients
-
Intentional islanding for DR.
13.2.4 Communication and Control Infrastructures
SCADA is an existing application of Information and Communication Technologies (ICT) in the electricity grid. This normally Ethernet-based network is used by operators to fulfill their missions of real-time monitoring and control functions. In emerging distribution networks, the introduction of RE sources is expected to be more efficient, when the development of the ICT-based DMS for meeting grid requirements matures. The ICT infrastructure will have to adapt to the operation of the myriad of small-scale generation units by monitoring a range of variables and ensuring efficiency of generation.
It is desired to have bidirectional power and information flows on the distribution networks with Neighborhood Area Network (NAN) and Home Area Network (HAN). Depending on characteristics of bandwidth, latency, traffic model, and priority level, different wired communication technologies such as Power Line Communications (PLC), Asymmetric Digital Subscribers Line (ADSL), fiber optic, and wireless technologies such as WiMAX, Code Division Multiple Access (CDMA), WiFi, ZigBee, may be used in different communication networks [12]. Figure 13.3 gives an overview about possible integrations of ICT technologies in emerging distribution systems and Smart Grids.

An overview of possible integration in emerging distribution systems and Smart Grids
As a part of a Smart Grid, smart metering and sensor systems are under varying levels of development and deployment for distribution networks. This is expected to provide large amounts of information for management and control purposes in smart grids [16]. DR can be implemented and supported by two-way smart meters and smart sensors on equipment communicating through ICT, managing the demand according to the agreements reached with the customers. Advanced ICT infrastructure opens possibilities for real-time and scalable market mechanisms to reduce uncertainty of instantaneously changing prices and to arrange short-time reserves. Near real-time information allows utilities to manage the power network as an integrated system, actively sensing and responding to changes in power demand, supply, costs, and quality across various locations. However, wide-area integration of ICT in the distribution system might also introduce vulnerabilities which might influence the reliability of the power network [17].
Control infrastructures for emerging distribution systems may appear as either centralized or decentralized schema. Regardless of the type of control infrastructure, it is imperative to possess a communication infrastructure for coordinated control actions. Communication is required to effect control actions such as dispatching generation, shedding loads, initiating black start, engaging energy storage elements, and participating in the electricity market [18]. The backbone of a successful communication system in emerging distribution systems is the existence of a minimally redundant sensory network that is capable of communicating among hierarchical agents [18].
13.3 Smart Topologies and Controls for Interface Systems
A power electronic interface, e.g., as an inverter, can operate in stand-alone or in grid-connected modes. There are a few interfacing control methodologies that should be used in both cases. In the stand-alone mode, the inverter must maintain the constant output voltage and frequency, and the load will determine the needed operation power factor. The inverter voltage is asynchronous with the grid voltage, and the reactive power is supplied by recirculation current through the free-wheeling diodes of the inverter’s Insulated Gate Bipolar Transistor (IGBT). It is also considered in the international literature as an Uninterruptible Power Supply (UPS) operation mode. In the grid-connected mode, the voltage and frequency are determined by the utility grid. The injected current is defined by the power electronic circuit with a proper feedback control. Therefore, the operation power factor is usually maintained unitary. With the advent of DG based on power electronics, several applications in the last few years have demonstrated the advantages of programming reactive power at the grid, harmonics mitigation, and even voltage control at the Point of Common Coupling (PCC), as well as the utilization of energy storage systems. However, such features can only be applied in practice if real-time communication is implemented between control system and utility. Smart-grid technological advances has been facilitating these advanced functions [19]. When the inverter is grid connected, an auxiliary security control systems must be implemented in order to isolate the inverter from the grid in case of black-out, and to seamlessly reconnect it back to the grid. IEEE 1547 standards have been developed in USA for distributed generation interconnection to the grid, and power electronic interfaces must comply with IEEE 1547 guidelines.
13.3.1 Interfacing Control Methods
Grid-connected inverter interfacing methods have historically evolved from front-end PWM rectifiers used in regenerative machine drives [20], where instead of dissipating power on dynamic break (from deceleration or torque reversal transient operation) the efficiency is improved by pumping power back to the grid. Actually, a grid connected inverter has the same control principles as Pulse Width Modulation (PWM) rectifier has; but further flexibilities are required when such systems are primarily injecting power in the grid from renewable energy sources (PV or wind), or from fuel cells, since an overall balance of system must be provided. In order for a Voltage Source Inverter (VSI) be connected to the grid, an impedance must be provided across, typically a decoupling inductor, or interphase reactors can be used to connect power converters with regenerative capabilities [21]. Voltage source converters connected to the grid have been demonstrated to have improved performance by LCL filters, originally proposed by [22] and since then incorporated initially in active rectifiers and latter to DG applications [23–25]. In addition, the control system for injecting power in the grid has been designed by analogy in order to resemble machine control techniques used in designing cascaded loop control—where voltage is commanded in the outer loop (as machine speed in a drive system) and current in the inner loop (as machine torque in a drive system). For the same reasons that a vector controlled drive system has back-EMF cross-coupling motional voltages that must be compensated in the torque control loop, a grid connected inverter presents a cross-coupling voltage drop, i.e., a system reactance multiplied by current term from one axis disturbing the other one. Therefore, a Proportional-Integral (PI) based controller must be properly designed to optimize such cross-coupling effects [21]. Recently, P + Resonant controllers have been used to improve dynamic performance of current control loop [26].
One of the major challenges for a proper decoupled control is the synchronization with the grid frequency. Several research works have applied Phase Locked Loop (PLL) techniques for grid connected inverters, while used LCL filters instead of common interphase reactors. However, there is still a discussion on which methodology is the most efficient. Three-phase systems are easily controlled with decoupled d-q or p-q theory, whereas single-phase grid connected inverters do not have a proper mathematical formulation. Solutions based on hysteresis band control, approximated solution considering a phase time shifted by 90o, or Hilbert transform have limited capabilities. Some approaches consider the same decoupled d-q or p-q methodologies for single-phase systems [27, 28].
The following sections describe the main approaches for implementing such interfacing control methods for grid connected inverters.
13.3.1.1 Constant Current Control
In order to connect to the utility voltage source grid, the inverter is designed to supply constant current output. The constant current control is implemented with reference frame transformation from three-phase to stationary frame (abc/dq). With the unity vector synthesized by a PLL, a reference frame rotates synchronously with the grid, as shown in Fig. 13.4 [29]. Equation (13.1) describes the grid dynamics which is used for the feedback control (typically PI controllers). This feedback loop limits output voltage on the reference frame. Figure 13.5 shows a control diagram that commands the gating pulses of the inverter transistorized bridge. The PLL synthesizes the unit vector that allows synchronization with the utility grid.

Stationary and reference frame for grid variables

Constant current control technique
where \( i_{d} \), \( i_{q} \) are the d and q axis current components; \( \Updelta e_{d} \) and \( \Updelta e_{q} \) are the instantaneous voltage difference between the PCC and the inverter output voltage of d and q axis components; R, L, and ω are grid resistance, inductance, and fundamental angular frequency.
13.3.1.2 Constant P-Q Control
The generalized theory of the instantaneous reactive power in three-phase circuits has been proposed by Akagi in 1983 [30] and it was used for the first time to control grid-connected inverters in 1991 by Ohnishi [31], as indicated by Eqs. (13.2) and (13.3). There are some advantages of instantaneous power-based controllers: (1) power calculation does not vary by any transformation, (2) it is directly related to energy-constrained sources, such as PV and wind, and (3) it allows instantaneous power balance transactions with the utility grid. Figure 13.6 shows an implementation diagram where active power builds up the q-reference value for current, which is compared to the instantaneous grid q-current, whereas the reactive power loop builds up the reactive power d-reference current value, which is compared to the instantaneous grid d-current. Therefore, a constant P-Q control is an outer loop over a current loop control.

Constant P-Q control technique
13.3.1.3 Constant P-V Control
The grid-connected inverters allow controlling the voltage at the PCC, as shown in Fig. 13.7 [19]. This technique is a slight variation of the previous one, where basically the voltage feedback is used to adjust the amount of reactive power (or d-axis voltage) required for the system. Although it seems simple, there are some challenges in this approach, where the instantaneous peak voltage of the utility grid must be followed at the PCC, the PCC must have an impedance, usually inductive, between the supply system and the inverter and that will affect the stability of the feedback control loop. The P-V control approach is the most suitable for voltage support utility services, but it is very difficult to define stability range of operation by mathematical analysis, and very extensive real-time simulation and experimentation must be conducted in order to implement the hierarchical level of active power and voltage grid control.

Constant P-V control technique
13.3.1.4 IEEE 1547 and Associated Controls
It is imperative that control algorithms that performs the task of connecting (and intentionally islanding) the Power Electronic (PE) based DG to (and from) the grid confirms with the IEEE 1547 family of standards, as applicable to the installation [14]. Control functionalities must take into account a variety of input parameters such as frequency, phase, and DQ frame voltage of the grid and the PE side. The control algorithm must compare these inputs with the IEEE 1547 recommendations and generate appropriate signals with in the recommended critical time to island or to reconnect the PE-based DG to the grid. It is relevant to note that at the time of writing this chapter the IEEE 1547 family of standards has begun deliberating the technical considerations for effective provision of both primary and ancillary services. In this chapter, a smart inverter is presented that takes into account the provision of at least one ancillary service in addition to the primary service [19].
13.4 Examples of Smart Interfacing Systems
In this section, three examples of power electronics-based smart interfacing systems—a smart inverter, a smart power router, and a virtual synchronous generator—are presented with the aid of description of the associated models and plots from simulation studies.
13.4.1 Smart Inverter
In this subsection, the combined functional ability of the voltage source inverter is defined to: supply power to local loads; supply power to other utility loads up to rated capacity of the inverter; store energy in a local lead acid battery bank; provide voltage support at the PCC of the utility; and provide control options to the consumer based on near real-time electricity information obtained from the utility through advanced metering devices.
General design methodologies for inverters applied in the smart grid systems is presented in [32, 41]; however, the combined smart functionalities described in this section are exclusive of this work. The smart inverter functionalities depicted in this section look beyond the recommendations of the current national technical standard for interconnecting DG sources to the grid—the IEEE Std. 1547 [14], because it may provide voltage support at the PCC, offering an extra service in case of voltage sags scenarios. Usually, in a scenario of voltage sags in distribution systems, the voltage is regulated by utility owned (or) operated capacitor banks; however, with the appearance of the smart inverter functionalities, the ability to regulate voltage at the PCC is brought to the customer. The authors have not probed the safety issues stemming from performing voltage control on the grid side using the proposed inverter setup.
Based on real-time spot pricing of active and reactive power obtained from the utility using an advanced metering device, on the state of charge (SOC) of the battery bank and on settings of the costumer, the inverter control algorithm determines the optimal operating mode. This algorithm enables the inverter to: (a) schedule local loads; (b) determine either to locally store energy or sell energy to the grid.
13.4.1.1 Models
A voltage source inverter was designed as a 5 kVA single-phase full bridge converter operating at 120 V (60 Hz) to function in two modes: grid-tied and islanded [19]. For it, the voltage source inverter must have two control loops: current control loop and voltage control loop. The entire control is developed in the dq frame with a virtual q-axis (as the application is single-phase). According to [33, 34], the q quantity is obtained either by the derivative of the fundamental signal, or by delaying the real axis quantity by one quarter of the grid-voltage period [19]. In this work, the latter technique is employed. Figure 13.8 depicts the block diagram of the smart inverter topology.

Block diagram of the smart inverter topology
The phase-locked loops (PLL) have been used to provide the phase angle (θ) information to the control loops, as shown in Fig. 13.9. The current and voltage control loops shown use four proportional-integral (PI) controllers: two PIs with the same gains for the current control loop \( \left( {\mathop {i^{*} }\nolimits_{d} \,{\text{and}}\,\mathop {i^{*} }\nolimits_{q} } \right) \), and two PIs with the same gains for the voltage control loop \( \left( {\mathop {v^{*} }\nolimits_{d} \,{\text{and}}\,\mathop {v^{*} }\nolimits_{q} } \right) \). The PI compensator generates the modular PWM signal and they have been chosen for its simplicity and ease implementation. According to Fig. 13.9, the main control consists of two control loops: voltage control loop, that is enabled when the inverter operates in islanded mode, and current control loop for the grid-tied mode.

Control loops of the smart inverter
The main goal of the voltage source inverter development with smart functionalities is to enable an efficient interconnection and economical operation for dispersed PV-based DG system to the utility grid. The local load (inverter load) has been modeled as two components: a primary VSI load and a secondary VSI load—which distinguishes the critical loads from others that may be scheduled at the location. Thus, if the inverter is operating at the islanded mode and it does not have enough power to supply all local loads, only the VSI primary load will be supplied. Another convenience of this load set is the ability to operate in the economic mode. This will be explained in the following sections.
The input to the single-phase voltage source inverter is a voltage stabilized at 350 VDC, provided by the set formed by photovoltaic panels and DC–DC boost converter. The nominal output voltage of the PV array is 192 V. Then a DC–DC boost converter has been used in the model to raise the PV voltage level to 350 VDC. The inverter setup also includes a lead-acid battery storage bank with nominal voltage of 192 V and 24 Ah cells, [19], connected to the DC link through a bidirectional DC–DC buck-boost converter modeled as shown in Fig. 13.10. A battery model is from MatLab/Simulink platform simulation [35]. The storage subsystem brings flexibility to the system, e.g., the ability to supply local loads when the inverter is islanded without enough power, to store cheap energy and to sell when the price is higher.

Control diagram of the bidirectional DC–DC buck-boost converter [19]
Table 13.1 provides a listing of the various specifications of the DC–DC buck-boost converter of the smart inverter [19].
The smart functionalities of the voltage source inverter are aimed at: provision of active and reactive power support to local loads and to grid loads up to the rated capacity; store energy in a local lead acid battery bank; option to regulate voltage at the PCC during voltage sags; and decision-making ability aided by information of real-time pricing obtained through advanced metering devices from the utility grid. Note that the goal of this section is not to discuss how the real-time pricing will be obtained.

Summarizes operating modes of the smart inverter
Based on the above functionalities, the inverter operation is governed by certain rules, which determine the mode of operation—identified in this section as super-modes and sub-modes. Depending upon the status connection to the grid as determined by compliance with IEEE Std. 1547, there are two super-modes: stand-alone mode (S1) and grid-tied (S2) mode, vide Fig. 13.11.

(a) Voltage and (b) current, on the inverter side; (c) voltage and current on the grid side for Case #1
In super-mode S1, i.e., the stand-alone mode, the inverter is islanded (isolated) from the electric distribution system and it is subject to operation under one of the following three sub-modes viz., s1, s2, s3 depending upon the available inverter active power (PINV) and the local active power demand (ZINV), where PINV represents the total active power output of the PV panels and the battery bank output, and ZINV represents the sum of active power of the primary VSI load plus secondary VSI load.
In sub-mode 1 under super-mode 1, identified as S1s1, when PINV is lesser than ZINV, the power output of the PV panels and stored energy are not enough to supply the full demand of the local load. In such case, a prioritization of local demand is effected and selected loads (primary VSI load) are powered by the inverter. If, after the selection of loads there is any remaining power from the PV panel, it will be directed to storage in the battery bank. Typically, such a redirection to the energy storage depends on level of the state of charge (SOC). It is important to note that the SOC control of battery banks will not be discuss in this section.
In sub-mode 2 under super-mode 1, defined as S1s2, when PINV is greater than ZINV, the available inverter power is greater than the local demand. In this circumstance the residual power is routed to the battery banks for storage.
In sub-mode 3 under super-mode 1, identified as S1s3, PINV is equal to ZINV, wherein the available inverter power is equal to the local load demand. In this case, the inverter feeds the local loads without storage. A prioritization of loads may be effected in this case if there is a need to store some of the energy for later use.
In super-mode S2, i.e., the grid-tied mode, the voltage source inverter is interconnected to the electric distribution system and is subject to operation under one of the following four sub-modes viz., s1, s2, s3, s4 depending upon the available inverter active power (PINV), local active power demand (ZINV), and economic considerations for trading active and reactive power with the grid on a spot pricing basis. The variables for economic consideration include the spot price to sell active power to grid ($PS), spot price to sell reactive power to grid ($QS), a threshold value of the grid pricing of an electricity unit which will enable the consumer to decide which loads will be powered using the inverter. In this case, it is assumed that the grid has infinite demand, i.e., the grid will acquire whatever the inverter intends to sell.
In sub-mode 1 under super-mode 2, defined as S2s1, when $QS is greater or equal than $PS, the inverter is controlled to provide voltage support regulation to the grid. If there should exist additional inverter capability to provide active power, then the inverter is controlled so that ZINV is supplied by the PINV and any remaining power is sold to the grid and/or stored in the battery bank [13].
In sub-mode 2 under super-mode 2, identified as S2s2, when $QS is lesser than $PS, the inverter is controlled to fix the reactive power reference to zero and supply only active power to local loads (ZINV) and any remaining power is directed to the grid and/or to the battery banks [13].
There exist another sub-mode under this super-mode, i.e., S2s3. This is related to the option of powering local loads using the inverter versus the option of purchasing active power from grid, when there is power available from DG. This can be chosen based on comparison of the real-time electricity pricing obtained from the grid ($PB) with a threshold value such as the marginal cost of electricity production or a set customer-preference, denoted as MCP. If $PB is lesser than MCP, then the inverter load is fed by the grid and PINV is stored in a battery storage for consumption or selling to the grid later, possibly during isolation from the grid or when real-time pricing of electricity is conducive to profitability, respectively. Or, if there is no PINV available, then the electric energy can be bought from grid and stored in battery for later use. If $PB is greater than MCP, then the inverter is so controlled that ZINV is fed by PINV and the stored energy in battery bank and any remaining power is sold to the grid. The use of the production marginal cost may not applicable in the case of PV systems; however, if the installation considers customer preferences as input as in [13], then the above rationale can be upheld as shown in case study #1.
The sub-mode 4, under super-mode 2, determined as S2s4, is with regard to the operation at an economic mode—this mode is being proposed as an alternative under the mode, S2s3. This usually occurs when the cost of purchasing electricity from the grid is relatively expensive, i.e., such as described in S2s3; thus, the inverter is setup for powering all its local loads while connected to the grid. However, in such a case, if the inverter power is not enough to supply its loads, the customer has an option to operate at an economic mode, i.e., effecting a prioritization of primary VSI loads and shedding the secondary VSI loads (as in S1s1). This sub-mode is achieved in the simulation by the use of a flag variable; if the flag is set to zero it operates in the economic mode using variable loads; and if the flag is set to one it operates in an “always supplying loads” mode, as the inverter power is not enough, power from grid is purchased to supply the remaining loads.
Figure 13.11 summarizes operating modes of the smart inverter. It is pertinent to note that the study presented here does not consider the time line for powering loads or charging the storage, i.e., in terms of energy demanded and supplied. Consideration of the energy supplied and demanded is inherently tied to hours of available sunlight, and to the PV installation capacity and the battery storage [13].
13.4.1.2 Simulation Based Case Study for the Smart Inverter
Based on the foregoing discussion, two case studies describing the smart functionalities of the inverter are presented in this subsection. The power and voltage bases used were 5 kW and 120 V (60 Hz), respectively. The grid side quantities are assumedly measured at the PCC.
Case #1, S2s3: grid-connected mode
In this simulation, the local demand for an hour is 2 kW, split into the primary VSI load of 1 kW and the secondary VSI load of 1 kW. According to the mode S2s3, the real-time electricity pricing obtained from the grid ($PB = 2.25 $/kW) is greater than a set customer-preference (MCP = 1.5 $/kW). Consequently, the reference points of the inverter are set to provide power to the local loads and to sell the remaining power to the grid. The voltage and current waveforms associated with this operation mode are shown in Fig. 13.12.

Voltage and current at the inverter side for Case #2
From Fig. 13.12 we can see that the voltage and current waveforms on the inverter side are in phase, corresponding to the fact that the inverter provide power to the local loads and to the grid. As the voltage and current are both at 1 pu, then the inverter active power is 5 kW, i.e., at the inverter nominal power. On the grid side, the voltage is 1 pu and the current is 0.6 pu shifted by 180°, indicating that the grid is acquiring 3 kW of active power. (Note: The power and voltage bases used were 5 kW and 120 V, respectively). In this case study, the reactive power demands at the inverter loads were set to zero.
Case #2, S1s2: stand alone mode
In this simulation, the local demand for an hour is 2 kW, while the available output from the PV modules is 5 kW. According to the mode S1s2, the setup is functioning in the stand alone mode; hence, the real-time electricity pricing ($PB) or the set customer-preference (MCP) are not relevant for the operation; rather, the option to use any excess generation for charging local energy storage devices is exploited. Consequently, the reference points of the inverter are set such that local loads (2 kW) are powered from the inverter, and the remaining power (3 kW) for that hour is utilized for charging the lead–acid battery. The voltage and current waveforms associated with this operation mode are shown in Fig. 13.13. Once again, in this case study, the reactive power demands at the inverter loads were set to zero.
As can be seen from Fig. 13.13, the voltage and current waveforms on the inverter side are in phase, corresponding to the fact that the inverter is supplying its local loads, without reactive demands.
13.4.2 Smart Power Router
The concept of Smart Power Router (SPR) as an intelligent and flexible interface between local control areas is one of the ways in which emerging distribution system will operate [36]. A core of SPR is a back-to-back converter system (hardware), so-called Power Flow Controller (PFC). SPR decides set points for PFC based on distributed control algorithms (software) implementing in the Multi-Agent System (MAS) environment (middleware).
13.4.2.1 Model
A configuration of SPR is shown in Fig. 13.14. Each moderator agent representing a local area network can obtain local information such as the power flow on incoming (outgoing) feeders, power generation and reserves, power load demands, cost of production, and load priority. Besides managing autonomous control actions, this moderator agent can send messages to communicate with the same level agents. The PFC is to control the power flow for its feeders based on the set points given by the moderator.

A configuration of smart power router
13.4.2.2 Simulation Based Case Study
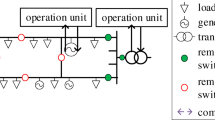
This section describes a 3-phase laboratory setup designed and implemented to demonstrate the performance of SPR. As a popular platform for the application of MAS in power engineering, the Java Agent Development framework (JADE) is used in this setup [37]. The realized setup consists of a physical test network separated into three areas by inverters, as shown in Fig. 13.15. The setup is flexible enough to test possibilities for reconfiguring network areas as well as rerouting power flow. In following subsections, the capability of connecting and disconnecting network areas will be shown.

Single-line diagram of the setup
Each inverter with 5 kVA normal power is independently controlled by a scheme shown in Fig. 13.16. The manual switch S inv−i is to connect the inverter to the grid, feeder, or load; with 10 A maximum current. The input contactor \( K_{2}^{\text{inv} - i} \) is used for charging DC bus via the rectifier whilst the output contactor \( K_{1}^{\text{inv} - i} \) is used for controlling purposes.

Schematic representation of the SPR
Connecting Inverter and Local Area Network
In order to illustrate the flexibility of the systems a set of experiments are conducted. The first experiment is to connect area 1 (can be considered as a microgrid) to area 2 and 3 (can be considered as the public grid) via the inverter system. Figure 13.17 shows a simplified diagram for this experiment of connecting area 1 to the rest of grid.

Simplified diagram in case of connecting a microgrid to the public grid
Inverter 3 is connected first to boost the DC bus voltage up to 680 V. Inverter 1 is then used to connect area 1 with the rest of the system. To ensure that the voltages between the two sides of \( K_{1}^{\text{inv} - 1} \) be alike, inverter 1 can use reference voltage from inverter 2 for the sake of simplicity. By opening S inv−2 and closing \( K_{2}^{\text{inv} - 1} \) , the measured voltage of inverter 2 is equivalent with the voltage at the inverter side of \( K_{1}^{\text{inv} - 1} \). This value will be compared with the grid side voltage of inverter 1 for synchronization. In reality, there will be a separated measurement at inverter 1.
Figure 13.18a shows response of V DC due to the connection of the inverters. Inverter 1 is first connected to the grid and operated in the DC bus voltage control mode to keep V DC at 680 V. Connections of inverter 2 and inverter 3 draw also amount of active power from the DC bus. After being connected to the grid, inverter 3 switches to the PQ control mode with set points at zero that causes slight oscillation in V DC. Power changes in the inverters are shown in Fig. 13.18b, c, and d.

Overall responses and power flows for the inverters. a DC bus voltage. b Instantaneous active power of inverter 1. c Instantaneous active power of inverter 2. d Instantaneous active power of inverter 3
To verify the capability of the PQ control mode, the following steps are deployed. At t = 65 s, the active power reference is stepped to 500 W, as shown in Fig. 13.19a. Then, at t = 95 s, the reactive power reference is stepped to 500 VAr, as shown in Fig. 13.19b. Note that positive value indicates the power flow direction from the grid to the inverter sides. The active power variation at t = 95 s is caused by the change in reactive power.

PQ control function for inverter 3. a Active power reference changes to 500 W, at t = 65 s. b Reactive power reference changes to 500 VAr, at t = 95 s
Since area 1 is now connected to the grid, inverter 3 takes the responsibility for the DC bus voltage control while inverter 1 operates in the PQ control mode. Inverter 2 uses a feed forward AC voltage controller and supplies, after switching on, the light resistive load of area 2. When maintenance or a disturbance occurs in an area, the area needs to be isolated from the others. In the setup, the main power stream is from the programmable source of area 1 to supply its local load and the variable load of area 2 via inverters 1 and 2.
Disconnecting a Local Area Network
The next case study is to adapt to changing conditions when, for instance, intentionally islanding area 1 and 2 (can be considered as a microgrid) from area 3 (the public grid). The DC bus voltage previously controlled by inverter 3 must be maintained to keep the power flow balanced. Inverter 1 can take over this function by changing its operation mode from PQ control to DC bus voltage control. Figure 13.20 shows a simplified diagram for the experiment of islanding local area network. Note that the removal of one of the inverters, limits the robustness and flexibility of the remaining inverters in the system and must be solved as soon as possible.

Simplified diagram in case of islanding a local area network
To keep the supply steady, inverter 1 must take over the DC bus voltage function of inverter 3 at the moment of switching off inverter 3 (at t = 40 s in this case) until the moment that inverter 3 reconnects again (at t = 60 s). Figure 13.21 shows that the test grid is kept stable during the maintenance switching period. There is a small oscillation of V DC which is damped after nearly ten seconds. The active power through inverter 1 is increased slightly because the load of area 2 was already supplied mainly by the programmable source before disconnection of inverter 3. The reactive power flow of inverter 1 is kept equal to zero. Since the maintenance is finished at t = 60 s, inverter 3 is successfully reconnected to the grid. The inverters are switched back to their previous operation modes.

Power flow through inverter 1 in case of disconnecting cells. a DC bus voltage. b Instantaneous active and reactive power
Bidirectional power electronics converters for topology flexibility, inverters for solar, wind, and other distributed generation applications together with static switches and other distribution FACTS devices will become crucial for the implementation of smart grids. Together with intelligent controls, protection, and multi-agent technologies the future smart grid will be able to operate with required flexibility and efficiency.
13.4.3 Virtual Synchronous Generator
The large-scale implementation of DGs creates both challenges and opportunities on the aspect of frequency control [38]. Increasing the share of small and medium-size generation units leads the whole system inertia to decrease. Unless fast acting primary control, the system frequency will become significantly sensitive with disturbances. Virtual Synchronous Generator (VSG) gives an opportunity for inverter-interfaced DG units to participate in preventing fast frequency decay [39]. Figure 13.22 illustrates a probable frequency behavior of the system before and after considering the contribution of VSG. Using the proposed scheme can facilitate and speed up the frequency recovery as illustrated.

Frequency control in a power system: nowadays and future with VSGs
13.4.3.1 Model
Distributed generation with power electronics interfaced units does not exhibit the inertial properties of typical synchronous generators. However, by emulating virtual rotational inertia to these units, the so-called Virtual Synchronous Generators can reduce the rate of change of frequency (ROCOF) and the frequency deviation. Figure 13.23 illustrates a simplified model of a VSG.

A simplified model of a virtual synchronous generator
Emulation of rotational inertia by VSG can be implemented by adjustment of active power in the way similar to a synchronous machine in the swing equation as follows:
where H VSG is a virtual inertia constant [s], which can be designed to be equal to the inertia constant of synchronous generator with the same power rating; ωgrid is grid frequency [pu]; ∆P inertial is an adjustment of VSG active power reference for emulation of inertial response.
As power adjustment is directly proportional to frequency deviation, the droop control can be added as follows:
where K droop is a designed droop gain, which can be selected in the similar way as droop gains for traditional power plants. The reference of grid frequency, ωgrid_ref is normally set at 1 pu.
Finally, the total active power that has to be adjusted by VSG ∆P VSG can be described as:
13.4.3.2 Simulation Based Case Study
The performance of VSG was tested in a laboratory setup. The setup includes a programmable source, a controllable AC load, and a VSG. By a pre-defined function, the source respectively decreases or increases the voltage and frequency like in the real grid. This emulated change of frequency is given to the model to test VSG control algorithm.
When the AC load was increased at t = 9 s, the programmable source reacts to decrease the frequency, see Fig. 13.24a. VSG start supplying power to the grid as a rotating mass of the synchronous generator when losing speed. Since the frequency increases, VSG absorbs power like slowing down the rotating mass of the synchronous generator. This contributing inertia and droop control power of VSG to support the grid are shown in Fig. 13.24b, c.

Performance of a virtual synchronous generator (VSG) with variable frequency. a Frequency. b Emulated inertia. c Instantaneous inertia and droop power
This initial experiment shows that the inertia of synchronous generators can be emulated by using inverter-interfaced storage. Virtual rotational inertial and power droop controls of VSG have been participated to stabilize the frequency change. A further result about field tests of VSG has been implemented with EU VSYNC project [40].
References
United States Department of Energy (2003) “Grid 2030” A national vision for electricity’s second 100 years. US Department of Energy. Available www.ferc.gov/eventcalendar/files/20050608125055-grid-2030.pdf. Cited 24 Apr 2012
Lightner E (2008) Evolution and progress of smart grid development at the Department of Energy. FERC-NARUC Smart Grid Collaborative Workshop. Available http://www.narucmeetings.org/Presentations/Evolution%20and%20Progress%20of%20Smart%20Grid%20Development.pdf. Cited 24 Apr 2012
US Congress (2007) Energy independence and security act of 2007 (EISA07). 110th US Congress
National Science and Technology Council (NSTC) (2011) A policy framework for the 21st century grid: Enabling our secure energy future. Executive office of the President: National science and technology council. Available http://www.whitehouse.gov/sites/default/files/microsites/ostp/nstc-smart-grid-june2011.pdf. Cited July 2011
Strobel CD (2009) American recovery and reinvestment act of 2009 (ARRA09). J Corp Account Financ 20(5):83–85 (111th US Congress)
US Department of Energy (2011) Smart grid information clearinghouse. Available www.sgiclearinghouse.org. Cited July 2011
(2011) Summary for Policymakers, International Panel on Climate Change, 11th Session of Working Group III of the IPCC, Abu Dhabi, United Arab Emirates
Locke G, Gallagher PD (2010) NIST framework and roadmap for Smart Grid interoperability standards, release 1.0. US Department of Commerce. Available http://www.nist.gov/public_affairs/releases/upload/smartgrid_interoperability_final.pdf. Cited July 2011
IEEE Guide for Smart Grid interoperability of energy technology and information technology operation with the electric power system (EPS), and end-use applications and loads. Institute of Electrical and Electronics Engineers (IEEE) Standard 2030. Sept 2011
International Electrotechnical Commission (IEC) (2011) Core IEC Standards. Available http://www.iec.ch/smartgrid/standards/. Cited July 2011
Brown HE, Suryanarayanan S, Heydt GT (2010) Some characteristics of emerging distribution systems under the Smart Grid Initiative. Elsevier Elec J. doi:10.1016/j.tej.2010.05.005
Brown HE, Haughton DA, Heydt GT, Suryanarayanan S (2010) Some elements of design and operation of a smart distribution system. Transmission and distribution conference and exposition, 2010 IEEE PES. doi:10.1109/TDC.2010.5484491
Armas JM, Suryanarayanan S (2009) A heuristic technique for scheduling a customer-driven residential distributed energy resource installation. Intelligent system applications to power systems, 2009. ISAP‘09. 15th international conference, pp 1–7. doi:10.1109/ISAP.2009.5352954
Photovoltaics DG, Storage E (2009) IEEE application guide for IEEE Std 1547, IEEE Standard for interconnecting distributed resources with electric power systems. Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/IEEESTD.2008.4816078
Inverters C (2005) Controllers and interconnection system equipment for use with distributed energy resources. UL 1741. Underwriters Laboratory (UL)
Deconinck G, Vanthournout K, Beitollahi et al (2008) A robust semantic overlay network for microgrid control applications. In: Lemos R et al (eds) A robust semantic overlay network for microgrid control applications. Springer, Berlin
La Poutre H, Kling WL, Cobben S (2009) Intelligent systems for green developments. ERCIM News 79:38–39
Suryanarayanan S, Mitra J, Biswas S (2010) A conceptual framework of hierarchically networked agent-based microgrid architecture. IEEE PES Trans Distrib Conf Exposition. doi:10.1109/TDC.2010.5484332
Carnieletto R, Brandão D, Suryanarayanan S et al (2011) A multifunctional single-phase voltage source inverter in perspective of the Smart Grid Initiative. IEEE Ind Apps Mag. doi:10.1109/MIAS.2010.939651
Malinowski M, Kazmierkowski MP, Trzynadlowski AM (2003) A comparative study of control techniques for PWM rectifiers in AC adjustable speed drives. IEEE Trans Power Electron. doi:10.1109/TPEL.2003.818871
Sukegawa T, Kamiyama K, Takahashi J et al (1992) A multiple PW GTO line-side converter for unity power factor and reduced harmonics. IEEE Trans Ind Apps 28(6):1302–1308. doi:10.1109/28.175281
Lindgren MB (1995) Feedforward-time efficient control of a voltage source converter connected to the grid by lowpass filters. Power Electron Spec Conf. doi:10.1109/PESC.1995.474942
Liserre M, Blaabjerg F, Hansen S (2005) Design and control of an LCL-filter-based three-phase active rectifier. IEEE Trans Ind Apps. doi:10.1109/TIA.2005.853373
Mao J, Wu G, Wu A et al (2011) Modeling and decoupling control of grid-connected voltage source inverter for wind energy applications. Adv Mat Res. doi:10.4028/www.scientific.net/AMR.213.369
Ko SH, Lee SR, Dehbonei H et al (2006) Application of voltage- and current-controlled voltage source inverters for distributed generation systems. IEEE Trans Energ Conv 21(3):782–792. doi:10.1109/TEC.2006.877371
Carnieletto R, Ramos DB, Simões MG, et al (2009) Simulation and analysis of DQ frame and P + Resonant controls for voltage source inverter to distributed generation. Power Electron Conf 104–109. doi: 10.1109/COBEP.2009.5347677
Hassaine L, Olias E, Quintero J et al (2009) Digital power factor control and reactive power regulation for grid-connected photovoltaic inverter. Renewable Energy 34(1):315–321. doi:10.1016/j.renene.2008.03.016
Kjaer SB, Pedersen JK, Blaabjerg F (2005) A review of single-phase grid-connected inverters for photovoltaic modules. IEEE Trans Ind Apps. doi:10.1109/TIA.2005.853371
Duarte JL, van Zwam A, Wijnands C, et al (1999) Reference frames fit for controlling PWM rectifiers. IEEE Trans Ind Elec 46(3):628–630. doi: 10.1109/41.767071
Akagi H, Kanazawa Y, Fujita K, et al (2007) Generalized theory of instantaneous reactive power and its application. Wiley, London, vol 103, pp 58–66, doi:10.1002/eej.4391030409
Ohnishi T (1991) Three phase PWM converter/inverter by means of instantaneous active and reactive power control. Indus Electron Control Instrum. doi:10.1109/IECON.1991.239183
Ortjohann E, Lingemann M, Mohd A et al (2008) A general architecture for modular smart inverter. Indus Electron. doi:10.1109/ISIE.2008.4676908
Roshan A, Burgos B, Baisden BC, et al (2007) A D-Q frame controller for a full-bridge single phase inverter used in small distributed power generation systems. Applied Power Electronics Conference, APEC 2007–Twenty Second Annual IEEE. doi:10.1109/APEX.2007.357582
Miranda UA, Aredes M, Rolim LGB (2005) A DQ synchronous reference frame current control for single-phase converters. IEEE Power Electron Spec Conf. doi:10.1109/PESC.2005.1581809
Math works Inc (2011) SimPowerSystems: model and simulate electrical power systems. Available: http://www.mathworks.com/products/simpower/. Cited July 2011
Nguyen PH, Kling WL, Ribeiro PF (2011) Smart power router: a flexible agent-based converter interface in active distribution networks. IEEE Trans Smrt Gr. doi:10.1109/TSG.2011.2159405
Telecom Italia SpA (2010) Java agent development framework. Available: http://jade.tilab.com/. Cited 24 Apr 2012
Ishchenko A, Kling WL, Myrzik J (2009) Control aspects and the design of a small-scale test virtual power plant. Power and Energy Society General Meeting-Conversion and Delivery of Electrical Energy in the 21st Century. doi: 10.1109/PES.2009.5260225
Driesen J, Visscher K (2008) Virtual synchronous generators. Power and Energy Society General Meeting-Conversion and Delivery of Electrical Energy in the 21st Century. doi: 10.1109/PES.2008.4596800
(2010) Virtual synchronous project. European Union. Available http://www.vsync.eu/. Cited July 2011
Xue XY, Chang L, Kjaer SB et al (2004) Topologies of single-phase inverters for small distributed power generators: an overview. IEEE Trans Power Electron. doi:10.1109/TPEL.2004.833460
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag London
About this chapter
Cite this chapter
Brandão, D.I., Carnieletto, R., Nguyen, P.H., Ribeiro, P.F., Simões, M.G., Suryanarayanan, S. (2013). Power Electronics for Smart Distribution Grids. In: Chakraborty, S., Simões, M., Kramer, W. (eds) Power Electronics for Renewable and Distributed Energy Systems. Green Energy and Technology. Springer, London. https://doi.org/10.1007/978-1-4471-5104-3_13
Download citation
DOI: https://doi.org/10.1007/978-1-4471-5104-3_13
Published:
Publisher Name: Springer, London
Print ISBN: 978-1-4471-5103-6
Online ISBN: 978-1-4471-5104-3
eBook Packages: EnergyEnergy (R0)