
Abstract
In the field of ergonomics, biomechanics, sports and rehabilitation muscle fatigue is regarded as an important aspect for study. Work postures are basically dynamic in nature. Classical signal processing techniques used to understand muscle behavior are mainly based on spectral based parameters estimation, and mostly applied during static contraction. But fatigue analysis in dynamic conditions is of utmost requirement because of its daily life applicability. It is really difficult to consistently find the muscle fatigue during dynamic contraction due to the inherent non stationarity time-variant nature and associated noise in the signal along with complex physiological changes in muscles. Nowadays, different non-linear signal processing techniques are adopted to find out the consistent and robust indicator for muscle fatigue under dynamic condition considering the high degree of non stationarity in the signal. In this paper, various nonlinear signal processing methods, applied on surface EMG signal for muscular fatigue analysis, under dynamic contraction are discussed.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Electromyographic (EMG) signal is an evaluation tool in the field of sports science, physical therapy, biomechanics, ergonomics, occupational health and rehabilitation. There are three applications which dominate the use of the surface EMG signal in these fields: its use as an indicator for the initiation of muscle activation, its relationship to the force produced by a muscle, and its use as an index of the fatigue processes occurring within a muscle. Muscle fatigue is defined as inability of produce the required power output for a given stimulus. This condition is characterized by a notable change in physiological and biochemical processes which includes recruitment of larger motor unit, reduction in muscle conduction velocity, alteration of blood flow, decreased mean power frequency of EMG signal, increased hydrogen ion and other metabolites etc. The study of muscle fatigue has two important applications. First, it can be used to identify weak muscles. The most famous application is in the analysis of low back pain patients. Second, it can be used to prove the efficiency of strength training exercises [1], [2]. Surface EMG technique for monitoring the fatigue using different computation methodologies has drawn attention of many researchers to under-stand more insights about the events occurring inside the muscle. Different authors use different objective criteria to indirectly quantify or identify fatigue related phenomena. For the study of surface EMG and its quantification there is a variety of signal processing tools available. Among them spectral analysis technique is the traditional technique most commonly used for muscle fatigue assessment [3], [4]. But spectral technique is reliable only during the static muscle contraction not during dynamic contraction. The reason behind it is the non stationarity induced in the signal during dynamic contraction. Stationarity of the signal is the basic requirement for the spectral analysis techniques. But in daily routine dynamic muscle contraction are most common and thus is a bigger matter of concern. In order to quantify surface EMG during dynamic condition various nonlinear signal processing techniques have been used. In present study, a review of different non-linear and non-stationary signal processing methodologies related to fatigue estimation along with their merits and demerits are presented.
2 Characteristics of EMG
Muscular fatigue is generally analyzed on recorded surface EMG (1) during static contraction or (2) during dynamic contraction, discussed below. During isometric muscle contraction, the joint angle and muscle length are constant. So, recorded EMG signal during this contraction can be assumed to be wide sense stationary signal. Fatigue condition can be identified as a change in power spectrum result, given in Fig. 19.1 [5]. This assumption is not true during dynamic muscle contraction, so dynamic field postures are simulated in a set of static conditions and fatigue is estimated [6].

Comparative change in power spectrum during fatigue while doing static contraction along with EMG signal [5]
In the field, the physical working postures are generally dynamic in nature, where both joint angle and muscle length vary. During dynamic contraction, because of physical (from the skin–electrode interface) and physiological constraints, causes the non-stationarity in the EMG signal, which makes it challenging to reliably estimate the fatigue indices. Various authors have attempted to estimate fatigue indices assuming following different conditions.
3 Non-Linear and Non-Stationary Signal Processing Techniques
Random discharge of active motor units imposes non-stationarity of the EMG signals, whereas non-linear characteristics are caused by functional interference between different muscles, changes of signal sources and paths to recording electrodes, variable electrode interface etc. All the classical methods use different assumptions before processing the signal. To better understand the system dynamics, different nonlinear time series analysis methods have been employed as alternatives in determining EMG-based fatigue indices.
3.1 Recurrence Plot
In a chaotic system, at any time instant, the phase space trajectory will follow roughly equal to the phase space area [7]. Therefore, quantification of recurrences and line segments of the phase space trajectory in recurrence plot (RP) method is used to capture nonlinearity of a non-stationary system.
First step in generating Recurrence plot, involves transformation of a uni-dimensional time series data, X into a multidimensional form as follows:
Where, d denotes time delay, m is the embedded dimension. These parameters should be selected with care otherwise non-optimal embedding parameters can cause result in discrete diagonal lines with smaller blocks [8]. Then a symmetric matrix of distances (e.g., Euclidean distances) can be constructed by computing distances between all pairs of embedded vectors. In the recurrence plot, the color of the pixels corresponds to the magnitude of data values (either actual or based on threshold) in a two-dimensional array and the coordinates correspond to the locations of the data values in the array. From the graphs, percent of determinism (%DET) is calculated as the ratio of number of selected (active) points on diagonal lines (>2) and total number active points. Percentage of recurrence (%REC) is calculated as the ratio of total number of active points and total number of points. Farina et al. have shown that %DET and %REC are good indicators in determining the muscle fatigue [8], whereas Yiwei et al. [9] have emphasized on %DET in determining muscle fatigue, similarly shown in Figs. 19.2 and 19.3.

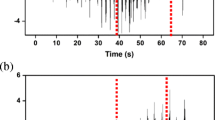
a EMG signal obtained for 238 s. during isometric contraction for endurance test. b % determinism of the signal increased with progression of fatigue linearly fitted in 3steps[10]

Recurrence Plot for a first 1.024 s and b last 1.024 s of above EMG signal. RP of last epoch shows increased periodicity in signal with increased determinism [10]
3.2 Entropy
Entropy is generally used to quantify the randomness and complexity in signal. In particular, it is used to characterize non-periodic, random phenomena and indicates the rate of information production in relation to the dynamic systems [11]. Especially, when dealing with surface EMG of muscle fatigue, previous non-linear techniques shows a wide statistical variation in result, which causes difficulties in proper identification of muscle fatigue. Another problem is the unavoidable noise associated with this signal. To solve these problems, Pincus [12] developed approximate entropy (ApEn) to measure the system complexity, which is applicable to noisy and short datasets.
Algorithm for calculating approximate entropy (ApEn) is shown below:
From a time series {u(i): 1 ≤ i ≤ N} a vector sequence, \( x_{i}^{m} \) is formed defined as:
Where Distance, \( d_{ij}^{m} \,\) between \( x_{i}^{m} \) and \( x_{j}^{m} \) is defined as
Probability for similarity between the two different vectors \( x_{i}^{m} \) and \( x_{j}^{m} \) can be calculated as:
Where, Θ is the Heaviside function:
Tolerance, r is defined as: r = k.std (t) Where, k is a constant k > 0 and std (.) represents the standard deviation of the time series. Logarithmic average over all the vectors of probability, \( C_{r}^{m} \left( i \right) \) calculated as:
ApEn for different epoch signal can be defined as:
ApEn calculation is basically based on Heaviside function, which may not be sensitive enough to the minor changes in the signal complexity. Therefore, the fatigue condition can be separated from non-fatigued state, but Hongbo et al. [13] have shown that ApEn is insensitive to the change in muscle fatigue, and they have used Fuzzy Approximate Entropy (fApEn) to improve the result. A comparative result is given in Fig. 19.4. fApEn is based on the similar algorithm as of ApEn except it uses ambiguous boundaries. The soft and continuous boundary of a fuzzy membership function makes the fApEn statistics decrease smoothly and monotonically when there is a slight increase in the tolerance r.

a Actual EMG signals, b the estimation of fApEn, c ApEn d MNF. The EMG signals were recorded from the biceps during the static isometric contraction from non-fatigue to exhaustion state [13]
Distance, \( D_{ij}^{m}\, \) between \( x_{i}^{m} \) and \( x_{j}^{m} \) is determined by a fuzzy membership function on normalized data by removing the effect of baseline, where r is having similarity degree,
Comparing of fApEn with ApEn; fApEn showed better monotonicity, relatively more consistency and more robustness to noise while characterizing signals with different complexities.
3.3 Huang-Hilbert Transform
Huang et al. [14] have proposed the Huang-Hilbert transform method (HHT) as a new tool for the analysis of nonlinear and non-stationary data. Unlike the Fourier transform, which is predicated on a priori selection of basis functions that are either of infinite length or have fixed finite widths, Empirical Mode Decomposition (EMD) decomposes a signal into finite basis functions called the intrinsic mode functions (IMFs) (fission process). EMD assumes that data have many different coexisting modes of oscillation, one superimposing on the others. EMD decomposition and separates a time series into a finite number of its individual characteristic oscillations (as shown in Fig. 19.5) in order to define a meaningful instantaneous frequency (as shown in Fig. 19.6). After EMD of time series, x (t) can thus be expressed as follows:

9 different sets of IMFs of EMG data with 500 ms analysis window. The 9th mode is residue, which was not considered during Hilbert transform [15]

Time courses of the mean frequency derived from Hilbert-Huang transform. The analysis window was 500 ms [15]
Where, n is the number of IMFs, \( C_{j} (t) \) are the IMFs and \( r_{n} (t) \) is the final residue.
The first component has the smallest time scale, which corresponds to the fastest time variation of data. Since the decomposition is based on the local characteristic time scale of the data to yield adaptive basis, it is applicable to non-linear and non-stationary data in general and in particular, fatigue EMG data considered in the following section. The second step of the HHT is Hilbert transform (HT). HT of the time series, x(t) is the convolution with 1/πt, Shown as:
Where, P indicates the Cauchy principle value. Then we define the mean instantaneous frequency, MIF (j) of c j (t) with m data points as the weighed mean of instantaneous frequency, ω j (t) and amplitude, a j (t) of hilbert spectrum computed as:
The mean frequency of the original signal is defined by:
By means of the combination of the amplitude and the derivative of the phase (i.e. the instantaneous frequency) of each component, it is possible to obtain the resulting amplitude, time, and frequency representation of the original series:
HHT is applicable on non-linear and non-stationary signal and it can capture the non-linear dynamics in a better way than the power spectrum analysis especially for fatigue estimation during dynamic contraction [15].
3.4 Interpretation of Results
Muscular fatigue is characterized by a complex combination of physiological and biochemical process induced by physical exercise. During dynamic contraction, alteration of mean power frequency is not universally accepted conclusion. Different authors adopt different methodologies to estimate muscular fatigue during dynamic contraction in separate ways. Using Recurrence Quantification Analysis (RQA), researchers assume EMG signal as nonlinear deterministic chaotic system and try to capture the increase in motor unit synchronization (from the nature of the recurrence plot) and reduction in conduction velocity (from the slope of the determinism) related to fatigue in an effective way. Approximate entropy, Fuzzy Approximate Entropy and Huang-Hilbert Transformation work on non-linear and non-stationary signal based on local time scale input data at any point, therefore the output does not suffer the problem of spectral leakage, unlike power spectral analysis. The result of Approximate Entropy often corrupt with inherent non-linear dynamics of EMG data during dynamic contraction along with due to noise, short data length etc. as it access the complexity and/or regularity based on Heaviside function However, Fuzzy Approximate Entropy is more robust than Approximate Entropy to estimate inherent dynamics and stochastic behaviors (Fig. 19.4). Different authors highlight that during dynamic muscle contraction, the non-stationarity dynamics is better captured by Huang-Hilbert Transformation from the slope and higher resolution of the time–frequency analysis. In comparison, Fig. 19.6 shows a clear and gradual decline in mean frequency than observed by power spectrum analysis result (Fig. 19.1). According to Srhoj-Egekher et al. [16], during dynamic contraction the local maxima of median frequency are directly correlated with the number of active muscle fiber, and it declines during fatigue [16]. In conclusion, future work will include a broader comparison of these methods to other new and established fatigue indices.
4 Conclusion
Efficient signal processing techniques have made it possible to detect fatigue from EMG signal with a limited degree of reliability during static contraction. In order to improve the reliability of fatigue indicator different non-linear signal processing techniques like Recurrence plot and Hilbert-Huang transform have shown promising results. Therefore, use of above mentioned techniques for non-linear and non-stationary surface EMG signal will provide another dimension for the muscle fatigue analysis. These techniques can be helpful to find out the most consistent and robust indicator for muscle fatigue during dynamic contraction.
References
De Luca CJ (1997) The Use of surface electromyography in biomechanics. J App Biomech 13:135–163
McQuade KJ, Dawson J, Smidt GL (1998) Scapulothoracic muscle fatigue associated with alterations in scapulohumeral rhythm kinematics during maximum resistive shoulder elevation. JOSPT 28(2):74–80
De Luca CJ (1984) MyoElectrical manifestations of localized muscular fatigue in humans. Crit Rev Biomed Eng 11(4):251–279
Paiss O, Inbar GF (1987) Autoregressive modeling of surface EMG and its spectrum with application to fatigue, IEEE, BIOMED ENGG, BME-34, 10:761–770
Dennis T, He H, Kuiken TA (2010) Study of stability of time-domain features for electromyographic pattern recognition. JNER 7:21
David ED, McClure PW, Karduna AR (2006) Effects of shoulder muscle fatigue caused by repetitive overhead activities on scapulothoracic and glenohumeral kinematics. J Electromyogr kinesiol 16:224–235
Chandre C, Wiggins S, Uzer T (2003) Time–frequency analysis of chaotic systems. Physica D 181:171–196
Farino D, Fattorini L, Felici F, Filligo G (2002) Nonlinear surface EMG analysis to detect changes of motor unit conduction velocity and synchronization. J Appl Physiol 93:1753–1763
Yiwei L, Markku K, Zbilut JP, Webber CL Jr (2004) EMG recurrence quantifications in dynamic exercise. Biol Cybern 90:337–348
Ikegawa S, Shinohar A, Fukunaga T, Zbilut JP, Webber CL Jr (2000) Nonlinear time course of lumbar muscle fatigue using recurrence quantifications. Biol Cybern 82:373–382
Richman JS, Moorman JR (2000) Physiological time-series analysis using approximate entropy and sample entropy. Am J Physiol Heart Circ Physiol 278:H2039–H2049
Xie H, Guo J, Zheng Y (2010) Fuzzy approximate entropy analysis of chaotic and natural complex systems: detecting muscle fatigue using electromyography signals. Annals of Biomed Engg 38(4):1483–1496
Pincus SM (1991) Approximate entropy as a measure of system complexity. Proc Nati Acad Sci USA 88:2297–2301
Huang NE et al (1998) The empirical mode decomposition and the hilbert spectrum for nonlinear and non-stationary time series analysis. Proc Royal Society A: Math, Phys Eng Sci 454:903–995
Xie H, Wang Z (2006) Mean frequency derived via Hilbert-Huang transform with application to fatigue EMG signal analysis. Comput Methods Programs Biomed 82:114–120
Srhoj-Egekher V, Cifrek M, Medved V (2011) The application of Hilbert–Huang transform in the analysis of muscle fatigue during cyclic dynamic contractions. Med Biol Eng Comput 49:659–669
Author information
Authors and Affiliations
Corresponding authors
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag London
About this paper
Cite this paper
Mishra, R.K., Maiti, R. (2013). Non-Linear Signal Processing Techniques Applied on EMG Signal for Muscle Fatigue Analysis During Dynamic Contraction. In: Chakrabarti, A. (eds) CIRP Design 2012. Springer, London. https://doi.org/10.1007/978-1-4471-4507-3_19
Download citation
DOI: https://doi.org/10.1007/978-1-4471-4507-3_19
Published:
Publisher Name: Springer, London
Print ISBN: 978-1-4471-4506-6
Online ISBN: 978-1-4471-4507-3
eBook Packages: EngineeringEngineering (R0)