
Abstract
Solutions for the most recent realization of the International Terrestrial Reference System (ITRS) were computed by the three ITRS Combination Centers (CCs) of the International Earth Rotation and Reference Systems Service (IERS), namely the IGN in Paris (France), the JPL in Pasadena (USA), and the DGFI-TUM in Munich (Germany). Thereby, the solutions of IGN and DGFI-TUM comprise conventional parameters of the ITRS (station coordinates and velocities) at a reference epoch as defined in the IERS Conventions 2010. Although the two solutions are based on identical input data, there exist systematic differences between them.
Within all ITRS realizations, the scale is realized as a mean scale between SLR (satellite laser ranging) and VLBI (very long baseline interferometry). If the combined scale is compared to the scale realized by both techniques itself, the IGN solution reveals significant differences between SLR and VLBI whereas the DGFI-TUM solution shows much smaller differences.
When the combined solutions of IGN and DGFI-TUM as well as the single-technique solutions of both institutions are investigated and compared, a significant scale difference between SLR and VLBI is only visible in the IGN analysis but not in the results of the two other ITRS CCs. It is also found that the scale analysis via Helmert parameter is very difficult since the results are quite sensitive w.r.t. particular station networks. In addition, scale comparisons of the IVS and ILRS CCs also do not confirm a systematic scale offset.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
Three Combination Centres (CCs) of the International Earth Rotation and Reference Systems Service (IERS) are in charge of computing a realization of the International Terrestrial Reference System (ITRS). The most recent realizations are called DTRF2014 (Seitz et al. 2016), which was computed using the combination scheme described in Seitz et al. (2012), ITRF2014 (Altamimi et al. 2016), and JTRF2014 (Wu et al. 2015). The advantage of multiple realizations using identical input data is, that errors or systematics caused by the combination approach, the analyst, or the software can be identified.
An example for such a systematic effect is the potential scale difference between SLR and VLBI. By comparing the ITRS realizations of DGFI-TUM and IGN via a 14-parameter similarity (Helmert) transformation, a significant scale difference between the SLR and VLBI subnet of the DTRF2014 and the ITRF2014 of about 0.6 ppb (opposite sign for both techniques) and nearly no scale rate is found. This leads to a scale difference of about 1.2 ppb which is equivalent to a height change of about 7.5 mm at the Earth’s surface. This result (at least the order of magnitude) is confirmed by the analysis of the IGN where the ITRF2014 solution reveals a significant scale bias between VLBI and SLR of 1.37 ppb (rate: 0.02 ppb/yr) (Altamimi et al. 2016). In contrast to this, the DTRF2014 does not show such a large scale discrepancy (up to 3.3 mm, depending on the test scenario).
This paper focuses on dedicated investigations of a potential scale bias between SLR and VLBI by applying various test scenarios. A major goal is to quantify its magnitude and to study the impact of different transformations to assess the reliability of the results. In Sect. 2, the following comparisons based on Helmert transformations using only stable and well-performing stations (low scatter, few discontinuities, long observation time span, etc.) are discussed:
- (Section 2.1):
-
SLR and VLBI single-technique solutions provided by DGFI-TUM and IGN,
- (Section 2.2):
-
DGFI-TUM’s SLR and VLBI single-technique solutions using local ties between co-located instruments (direct approach),
- (Section 2.3):
-
DGFI-TUM’s SLR and VLBI single-technique solutions via GNSS co-locations (indirect approach),
- (Section 2.4):
-
combined IVS solutions w.r.t. different TRF realizations (test done by IVS CC at BKG, Germany),
- (Section 2.5):
-
combined ILRSA solutions w.r.t. different TRF realizations (test done by ILRSA CC at ASI, Italy).
2 Scale Investigations: Test Scenarios
Here, we test if there is a significant scale difference between SLR and VLBI and we assess the reliability of the transformations used to determine a scale bias. Therefore, internal as well as external comparisons of the DGFI-TUM and the IGN solution are provided in this paper. The secular ITRS realizations comprise station positions and velocities, which can be compared by 14-parameter Helmert transformations in terms of estimated scale offset and rate between SLR and VLBI. In contrast to them, the JPL solution provides epoch-wise (sub-secular) station position estimates which are investigated in Sects. 2.4 and 2.5.
2.1 Comparison of Single-Technique Solutions
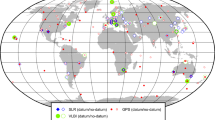
In this sub-section, the single-technique SLR and VLBI solutions provided by DGFI-TUM and IGN are compared (Fig. 1). All solutions are based on identical input data without any deformation due to the inter-technique combination. The solutions are obtained after epoch-wise input data were accumulated and the geodetic datum was realized. These steps had been performed by the respective institutes. In case of the DGFI-TUM VLBI-only solution, datum-free normal equations (NEQs) were accumulated, station velocities were introduced and No-Net-Translation (NNT) as well as No-Net-Rotation (NNR) conditions were applied to the station coordinates and velocities to realize the origin and the orientation of the VLBI TRF. In case of the DGFI-TUM SLR-only solution, only the orientation has to be realized. This study allows to test if either SLR or VLBI are solely responsible for the scale bias between SLR and VLBI seen in the ITRF. The transformation results are listed in Table 1.

Comparison of the SLR and VLBI single-technique solutions of DGFI-TUM and IGN. The black arrows indicate the Helmert transformations
We find that there is neither a prominent scale offset nor rate between the DGFI-TUM and IGN single-technique solutions for SLR and VLBI as found for the ITRF. If the transformation epoch is changed from 2000.0 to 2010.0, the scale offset increases from 0.2 to 1.5 mm (0.2 ppb) which still does not explain the large bias seen by Altamimi et al. (2016). The opposite behavior is achieved in case of the SLR transformation. Here, the scale bias decreases from 2.2 mm at 2000.0 to 0.7 mm (0.1 ppb) at 2010.0. The small scale biases between the single-technique solutions might be caused by the fact that IGN accumulates the epoch-wise VLBI and SLR solutions while introducing Helmert parameters whereas DGFI-TUM directly combines datum-free NEQs. This point needs further investigations. For the transformation, the technique-specific core station networks are used. As a conclusion, we can state that the scale bias reported for the ITRF is not present in the technique-specific input data which indicates that this effect might be caused by the inter-technique combination.
2.2 Comparison of Single-Technique Solutions: Direct Via Local Ties
In this test we transform a selected VLBI network on the co-located SLR network. Since SLR and VLBI observations refer to different reference points, we use local tie vectors (terrestrially measured vectors between instrument’s reference points) to compute a “VLBI reference point” at an SLR marker. Afterwards, we can directly compare the transformed VLBI-only solution (referred to the SLR marker) with the SLR-only solution (see Fig. 2).

Direct comparison of DGFI-TUM’s VLBI and SLR single-technique solutions by using local ties between co-located instruments
Important issues in this investigation are the number, the quality, and the global distribution of co-locations between SLR and VLBI. A high number of co-locations is necessary to achieve stable transformation results. In addition, also the quality of the co-locations impacts the transformation. Thereby, the common observation time span of SLR and VLBI should be as long as possible to get reliable results.
In Fig. 3 (upper panel), the SLR observation time spans (blue bars) for 19 possible co-location sites between SLR and VLBI are shown together with the VLBI observation time spans (red bars) and the common observation time spans of both techniques (green bars). Out of 19 sites, only 9 have a common observation time span longer than 5 years. An example for a high quality co-location station is Hartebeesthoek in South Africa (left panel in Fig. 3) which provides 22 years of parallel SLR and VLBI observations. Even if there are 5 years of common observations, these observations could also be made more than 20 years ago (e.g., Quincy, USA, middle panel). Any error in the velocity estimation of the SLR or VLBI reference point would result in large errors at the transformation epoch (e.g., 2010.0) when the old local tie measurement is used to derive the marker coordinates. The example in the right panel of Fig. 3 shows Yarragadee in Australia which provides 3 years of parallel observations during the most recent years which are far away from the transformation epoch 2000.0 (large interpolation error).

Time span of SLR (blue) and VLBI (red) observations and common time span of both techniques (green). In the lower panels, selected examples for the stations in Hartebeesthoek (South Africa, left panel), Quincy (USA, middle panel), and Yarragadee (Australia, right panel) are shown together with the local tie (LT) measurement epochs
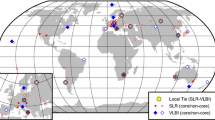
Besides the common observation time interval and the quality of the co-locations, also their global distribution affects the transformation. Figure 4 shows the global distribution of 19 co-locations (Fig. 3) according to their common observation time span. The longer the common time span of SLR and VLBI observations is, the more reliable is the computation of the “VLBI reference point”. First of all, a clear inequality of the number of co-locations on the northern hemisphere compared to the southern hemisphere can be found. Secondly, the importance of Hartebeesthoek (South Africa) for the global coverage becomes visible.

Global distribution of VLBI and SLR co-location sites. The radii of the circles indicate the common observation time span of VLBI and SLR
Table 2 shows the transformation parameters between the SLR and the VLBI single-technique solutions using local ties obtained for the DTRF2014. The transformation parameters of three different station networks are compared at three different epochs. In summary, we can say that in test case A, the scale offset is between 3 and 4 mm for all epochs using the 9 co-locations (out of 19 possible ones). If we add Yarragadee to the transformation network (test case B), we see a significant impact of this station on the obtained offsets (as well as on the rates) with a small scale offset at the epoch 2010.0. This is caused by the fact that the VLBI telescope starts operation around 2012 which is 2 years away to the newest transformation epoch (including the LT measurement epoch). Test case C shows that the extrapolation of Quincy from 1991 over 9 years to all transformation epochs is problematic. In that case, a clear scale bias between SLR and VLBI is visible. This effect is a consequence of the velocity handling within the DTRF2014 computation. If two velocities are statistically not equal, they are not equalized in our solution with the consequence that the reference points drift away from each other with time.
The conclusion of this sub-section is that the results of a direct comparison between SLR and VLBI are quite sensitive w.r.t. particular stations used in the transformations. However, the most stable transformation with 9 co-locations does not explain the large scale bias between the SLR and the VLBI solutions of ITRF2014.
2.3 Comparison of Single-Technique Solutions: Indirect Via GNSS
In this section, we describe the indirect transformation approach between SLR and VLBI using the co-locations to GNSS. One big advantage of this indirect approach is the improved network geometry. Whereas there are only 9 long-term (more than 5 years common observations) co-locations between SLR and VLBI directly (see Sect. 2.2), we have up to 31 co-locations between SLR and GNSS and up to 36 between VLBI and GNSS, respectively, if a threshold of 25 mm is applied for the local tie accuracy. In analogy to Sect. 2.2, we use the local ties to GNSS to compute GNSS markers from SLR and VLBI reference points (see Fig. 5). After the marker computation, we transform the GNSS markers to the GNSS-only solution of DGFI-TUM at the epoch 2000.0 and subtract the obtained transformation parameters. At the end, we achieve an indirect estimate of the scale difference between SLR and VLBI using the improved network geometry of the GNSS station network.

Transformation of DGFI-TUM’s VLBI and SLR single-technique solutions via GNSS co-locations (indirect approach, but improved network geometry). After the transformation, the obtained transformation parameters are subtracted from each other
Table 3 summarizes the scale differences between SLR and VLBI using the indirect approach via the GNSS co-locations. To test the robustness of this comparison, we use four different local tie thresholds for the discrepancy between the single-technique coordinates of the reference points and the measured local tie vectors. As we can see, a restrictive local tie selection (e.g., 7 mm threshold) results in the smallest number of transformation stations (20 for VLBI, 15 for SLR) and a scale bias of 0.1 ppb (0.7 mm at the Earth’s crust). If the threshold is increased to 25 mm, also the number of transformation stations increases to 36 stations, but a scale bias of −0.5 ppb (− 3.3 mm) is obtained. This large threshold primarily deform the SLR network since the scale bias increases by nearly 5 mm. In total, three test scenarios show VLBI and SLR scale differences below 0.15 ppb (1 mm). Although the better network geometry gives more stable transformation results, it should also be noticed here that the large number of GNSS discontinuities is a critical issue for the scale comparison since co-locations in the past might not be transferred properly to the transformation epoch. In other words, a measured local tie is not valid any more if a discontinuity is introduced.
2.4 VLBI Scale Comparisons Performed by IVS CC
A different approach to assess the scale bias between SLR and VLBI is to look a the scale differences which the Combination Centre (CC) of the International VLBI Service for Geodesy and Astrometry (IVS) located at BKG (Germany) obtained. They compared the estimated scale parameters of the epoch-wise IVS combined solutions (VLBI-only) to several different TRF realizations (see Fig. 6). The results indicate that the DTRF2008, the DTRF2014, the JTRF2014, and the quarterly VLBI-only TRF solution VTRF2015q2 agree well with the IVS combined solutions in terms of scale offsets showing a mean value close to zero. The ITRF2008 as well as the ITRF2014 reveal a mean offset of about − 0.5 ppb (− 3.4 mm) by construction. The mean value of both ITRF solutions w.r.t. the IVS combined solutions can be explained by the obtained scale bias between SLR and VLBI in the ITRF solutions. Since the ITRF scale is a mean of the SLR and the VLBI scale, each technique-only solution must show an offset w.r.t. the ITRFs. Despite this fact, all other solutions do not show any long-term mean offset which means that the VLBI-only station networks within these combined solutions realize a scale which is identical scale to the VLBI-only scale.

Scale of combined IVS solutions w.r.t. different ITRS realizations. This plot has been kindly provided by S. Bachmann (IVS CC at BKG, Germany)
2.5 SLR Scale Comparisons Performed by ILRS CC
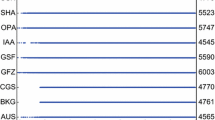
Similarly to the VLBI-only scale, this sub-section focuses on the external comparison of the SLR-only scale. Therefore, the primary (A) CC of the International Laser Ranging Service (ILRS) located at ASI (Italy) named ILRSA in the following provided epoch-wise estimated scale differences of the weekly combined ILRSA solutions w.r.t. the most recent ITRS realizations (Fig. 7). Again, the DTRF2014 as well as the JTRF2014 do not show a long-term mean offset w.r.t. the SLR-only solutions whereas there is a mean scale offset of about − 0.6 ppb (− 4.0 mm) for the ITRF2014. The sign of this offset depends on the transformation direction (the opposite sign will be used to quantify the scale offset between SLR and VLBI). This means that the DTRF2014 and the JTRF2014 do not adjust the scale of the SLR subnet since it is implicitly included in the SLR-only NEQ. The same behavior was found for the VLBI subnet in the previous section. Thus, the results of the comparisons done by the IVS and ILRSA CCs do confirm the 1.2 ppb (− 0.5 ppb for VLBI in Sect. 2.4 and 0.6 ppb for SLR) apparent scale bias between the SLR and the VLBI ITRF2014 solutions. Up to now, no explicit explanation can be found for this behavior but most likely, the scale difference might be explained by the combination procedure (adjusting scale parameters for SLR and VLBI or not) or the local tie and velocity tie handling within the ITRF solutions.

Scale of combined ILRSA solutions w.r.t. different ITRS realizations. This plot has been kindly provided by C. Luceri (ILRSA CC at ASI, Italy)
3 Summary and Conclusions
The three most recent realizations of the ITRS, namely the DTRF2014, the ITRF2014, and the JTRF2014 provide a valuable basis to measure the consistency of the combination processes of the terrestrial reference frame. In this paper, the SLR and VLBI scale bias investigation was brought into focus triggered by a bias of 1.37 ppb reported by IGN for the ITRF2014 which cannot be confirmed by the two other ITRS CCs and the IVS and ILRSA CCs. To verify the results, we defined several test scenarios to (1) quantify a possible scale bias and (2) to assess the reliability of the obtained results. In the following, the major findings of this investigation are summarized:
-
The single-technique SLR and VLBI solutions do not show a significant scale offset or rate difference between IGN and DGFI-TUM.
-
A direct comparison between SLR and VLBI (via Helmert transformations) is quite sensitive w.r.t. particular stations used in the transformation. If the most stable transformation with 9 co-locations is used, the large scale bias observed by IGN between SLR and VLBI is not confirmed.
-
Transformations via the GNSS network using local ties provide a much better geometry for the Helmert transformation. If a reasonable local tie selection is used, only mean scale offsets of up to 1 mm are found.
-
The IVS and ILRSA results show a good agreement of the VLBI and SLR scale w.r.t. the DTRF solutions and the JTRF2014, but reveal a bias and a drift w.r.t. ITRF2014.
As a final conclusion, we can only state that a scale bias between VLBI and SLR cannot be explained by our results. As a consequence, the apparent scale issue seems to be an effect inherent in ITRF2014 only. Since the single-technique secular solutions agree quite well to each other (between DGFI-TUM and IGN), the reason for the scale bias in the ITRF2014 might be caused in the inter-technique combination procedure.
In addition, one has to mention that all results presented in this paper do not converge to a clear and evident statement if there is a scale bias between SLR and VLBI or not. This paper tries to extend the common analysis by applying different strategies to resolve a potential scale bias. Unfortunately, further investigations are still necessary to finally answer this question in an unambiguous way.
References
Altamimi Z, Rebischung P, Metivier P et al (2016) ITRF2014: A new release of the International Terrestrial Reference Frame modeling non-linear station motions. J Geophys Res 121(8):6109–6131. https://doi.org/0.1002/2016JB013098
Seitz M, Angermann D, Bloßfeld M et al (2012) The 2008 DGFI realization of the ITRS: DTRF2008. J Geod 86(12):1097–1123. https://doi.org/10.1007/s00190-012-0567-2
Seitz M, Bloßfeld M, Angermann D et al (2016) The new DGFI-TUM realization of the ITRS: DTRF2014 (data). Deutsches Geodätisches Forschungsinstitut, Munich. https://doi.org/10.1594/PANGAEA.864046 (Open Access)
Wu X, Abbondanza C, Altamimi Z et al (2015) KALREF-a Kalman filter and time series approach to the International Terrestrial Reference Frame realization. J Geophys Res Solid Earth 3775–3802. https://doi.org/10.1002/2014JB011622
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Switzerland AG
About this paper

Cite this paper
Bloßfeld, M., Angermann, D., Seitz, M. (2018). DGFI-TUM Analysis and Scale Investigations of the Latest Terrestrial Reference Frame Realizations. In: Freymueller, J., Sánchez, L. (eds) International Symposium on Advancing Geodesy in a Changing World. International Association of Geodesy Symposia, vol 149. Springer, Cham. https://doi.org/10.1007/1345_2018_47
Download citation
DOI: https://doi.org/10.1007/1345_2018_47
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-12914-9
Online ISBN: 978-3-030-12915-6
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)