
Abstract
-
Population dynamics is the study of how and why population sizes change over time.
-
Repeated censuses of individuals within populations are the core data collected by plant ecologists studying population dynamics.
-
Plant populations are characterized by their size (or density) and their structure (the numbers of individuals of different ages and sizes).
-
Plant population ecologists use observations, experiments, and mathematical models to document and understand patterns of population dynamics.
-
Most plant populations appear to be regulated by density-dependent forces; resource competition and natural enemies are the most likely forces responsible for regulation.
-
Stochastic forces have particularly strong effects on small populations.
-
Population viability analyses assess how stochastic forces affect a population’s probability of extinction and can be used to identify effective management options.
-
Demographic differences among individuals affect their potential contributions to population dynamics.
-
Transition matrix models are the most important model used to study plant populations and guide the management of harvested populations and species of conservation concern.
-
Regional dynamics of assemblages of plant subpopulations, such as metapopulations, have not been well studied in plants and are an active area of research.
Access provided by Autonomous University of Puebla. Download reference work entry PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
Introduction
The Haleakala silversword , Argyroxiphium sandwicense subsp. macrocephalum, is an unusual plant for many reasons, not the least of which is its striking appearance, like the offspring of a marriage between a footstool and a pincushion (Fig. 1).

A flowering Haleakala silversword (Photo by Forest and Kim Starr)
Found only on Mt. Haleakala, a dormant volcanic cinder cone on the Hawaiian island of Maui, this remarkable plant lives on mostly barren, rocky, unstable slopes at elevations of 2,100–3,000 m. Individuals live for up to 50 years before sending up a flowering stalk that bears as many as 600 flower heads. After this one reproductive episode, the plant dies.
The Haleakala silversword population has survived the cattle and goats that once grazed the mountain and persists despite the fact that tourists impressed by their bizarre appearance once routinely “bowled” these plants down the mountainside or uprooted them for souvenirs. Protection from these threats in the 1930s greatly increased the silversword’s numbers over the next 60 years. By the late 1990s, the silversword population was estimated to be 16 times larger than it had been in 1935, and this iconic plant came to be considered one of the Hawaiian Islands’ conservation success stories. However, since the mid-1990s, the silversword population is once again in decline (Fig. 2; Krushelnycky et al. 2013).

Numbers of Haleakala silversword individuals at a high-elevation canyon rim site (open squares) and at five sampling areas on the crater floor (other symbols) (Figure from Krushelnycky et al. 2013)
These trends would not have been apparent except for observers who chose to census the number of silversword individuals in the Mt. Haleakala population, starting with park ranger S.H. Lamb in 1935 (U.S. Fish and Wildlife Service 1997). Census data are key to understanding the dynamics of plant populations, i.e., how numbers of individuals change over time, and to determining the causes of those changes. This chapter will examine the history, key concepts, main methodologies, and important unanswered questions in the field of plant population dynamics.
A population is a group of individuals belonging to the same species, living in the same area. The study of plant population dynamics, i.e., how and why plant populations change in numbers over time, is a relatively recent chapter in plant ecology. While a few earlier workers had carried out repeated censuses of plant populations, British ecologist John L. Harper (1925–2009) revolutionized how ecologists thought about plants with his 1967 paper, “A Darwinian Approach to Plant Ecology,” and his 1977 book, Population Biology of Plants. Before Harper, it was mostly zoologists, not botanists, who studied the biology of populations. Harper, his students, and many other ecologists he influenced developed the quantitative, process-oriented, and often experimental approach to the study of plant population dynamics that characterizes the field today. In fact, John Harper argued that plants were more suitable than most animals for the study of population dynamics because “plants stand still to be counted and do not have to be trapped, shot, chased, or estimated” (Harper 1977, p. v).
Plant population ecologists are interested in knowing what trends characterize plant populations over time – do they increase? Decrease? Remain constant? Are these patterns predictable or stochastic? What forces are responsible for the different patterns? These questions are of interest not only for their own sake, but also because their answers can lead to effective problem solving in the fields of agriculture, forestry, range management, natural area management, and species conservation.
This chapter will begin by describing the structure of plant populations and by considering some aspects of plant biology that affect how plant populations are studied, such as the relationship between size and age, and how “individuals” are defined. This will be followed by a description of some of the spatial and temporal patterns displayed by different populations and a consideration of the possible causes of these different patterns. The chapter will briefly review some of the primary methodological approaches used to study plant populations in the field. Throughout, it will illustrate some of the ways these approaches have been applied to address particular practical problems, especially in the area of biodiversity conservation.
Structure of Plant Populations
A consideration of the structure of plant populations starts with the question “what is an individual?” Many herbaceous and woody plant species, including some tree species, are capable of spreading horizontally by means of rhizomes and runners. For such species, an “individual” is a nebulous concept and not necessarily a meaningful distinction. It is easy to recognize a newly germinated seedling as a single individual, but that individual can grow into a patch of grass many meters in diameter or an aspen clone that covers an entire hillside. These differences between individuals are a consequence of the modular growth form typical of most plant species. Deciding how to quantify the number of individuals in a population is often the first challenge that must be confronted when studying a plant population’s dynamics.
Plant ecologists have found it useful to distinguish between two kinds of individuals. Individuals that arise from different propagules and are thus genetically distinct from one another are known as genets. However, because an individual that has spread horizontally may break up into physically independent units, not all independent units are distinct genets. Individuals that are physiologically independent of one another are considered separate ramets, regardless of their genetic similarity. The number of genets in a plant population can be much lower than the number of ramets. Ramets are often easier to recognize than genets, so this definition of an individual is more frequently used. Because the identification of individuals can be so challenging in many species, studies of plant populations have historically been biased toward those species in which individuals are relatively easy to define; we know much less about species with strong propensities toward vegetative spread than about species that tend to restrict their growth to the vertical dimension.
Once the issue of how to define an individual has been addressed, there are two ways to express the size of a population. Sometimes a population’s size is described as the number of individuals it contains; other times it is the population’s density that is reported, i.e., the mean number of individuals per unit of area. It is important to keep in mind that density is an average measure for the entire population and that individuals can be distributed in space in three different ways. Individuals of a species are sometimes spaced regularly, such that the mean density of individuals in a series of sampling plots is greater than the variance in density among plots. Alder shrubs in the Alaskan tundra are regularly spaced; Chapin et al. (1989) suggested that regular spacing is most likely to be found in habitats with low species diversity and intense competition for resources, like desert or tundra. Rarely, individuals are randomly distributed in space (Hutchings 1997); in this case the mean density of individuals among plots is similar to the variance. Finally, individuals are most often found in a clumped distribution (Hutchings 1997), with the variance in the density of individuals among sample plots being greater than the mean. A clumped distribution pattern can occur if the underlying physical environment is heterogeneous, with individuals clustered within the suitable patches and absent from the unsuitable ones. It can also arise from the fact that many plant species have rather localized seed dispersal, so that seedlings are often found in close proximity to their parents.
In addition to variation in their spatial distribution, individuals within a population can vary in such characteristics as their size, their age, or their sex. These so-called demographic parameters often have important effects on how each individual contributes to a population’s dynamics. Because most plant species have perfect flowers, there is only one sex in most plant populations; all individuals are hermaphrodites. In such species, sex is not a particularly important demographic characteristic. Sex is a more important demographic parameter in many animal populations and in those plant species with separate sexes. In such species, the ratio of male to female individuals can strongly affect a population’s potential for increase.
In animals with determinate growth, age is a very important demographic parameter. Individual animals often must reach a certain age before achieving sexual maturity, and an individual’s probabilities of dying and of giving birth (probabilities often referred to as vital rates) are well correlated with its age. By contrast, consider a seedling Eucalyptus, a 5 m tall Eucalyptus in the forest understory, and a mature 100 m tall Eucalyptus tree, each of which has very different probabilities of dying and of reproducing. While it is certain that the mature tree is older than the seedling, the age of the understory individual is more difficult to predict. Such an individual might be quite young, if it germinated in a light gap and there were no other individuals growing nearby to compete for water or nutrients. Alternatively, such an individual might be considerably older if its growth has been suppressed by competition with larger neighbors for many years. But in an important sense, its age doesn’t matter; this individual won’t flower or set seed until or unless it reaches the canopy. The indeterminate growth form of this and many other plants means that an individual plant’s probability of dying or reproducing tends to be more closely related to its size, or to its growth stage, than to its age (Gurevitch et al. 2002). Individuals of different sizes or stages have very different potentials to influence the population’s future size.
Therefore, many studies of plant populations record information on the size or growth stage of each individual in the population. This information can be displayed in the form of a histogram. Many plant populations in nature display a size structure like that shown by the tropical tree Araucaria cunninghamii in Fig. 3.

Numbers of different-sized Araucaria cunninghamii individuals per hectare in Papua, New Guinea (Data from Enright and Ogden 1979)
This pattern has three primary causes: first, many plants tend to produce large numbers of small propagules. Second, individuals experience mortality as they grow. And third, small individuals are generally more vulnerable to mortality than larger ones are, which is why numbers of individuals in the larger size classes diminish much more gradually than those in the smaller size classes do.
The observation of deviations from this pattern can generate interesting questions about a population’s history. For example, in Yellowstone National Park, USA, in the floodplain of the Lamar River, there are mature cottonwood trees and large numbers of seedling cottonwoods, but almost no individuals intermediate in size between these two classes (Fig. 4).

Numbers of cottonwood trees of different trunk diameter size classes in the Lamar Valley of Yellowstone National Park, USA (Reprinted from Beschta 2003)
According to Beschta (2003), this gap suggests that little or no recruitment of this riparian species occurred between 1920, when wolves were hunted to extinction in the Park, and 1995, when they were reintroduced. While wolves were absent from the Park, Beschta hypothesized, elk boldly grazed in these open river valleys, eating young seedlings and saplings and preventing the establishment of mature trees. With the recent return of wolves to the valley, elk have become more wary, rarely venturing out of the forest into the open floodplain habitat (Beschta 2003), allowing seedling cottonwoods to survive unbrowsed. While this hypothesis for the cottonwood stage structure in Yellowstone remains controversial (Winnie 2012), it is clear that the unexpected size structure of this cottonwood population demands an explanation.
In even-aged populations of agricultural or greenhouse plants, other patterns of size structure are observed, and it becomes possible to examine how these patterns develop and change over time. Frequency distributions of seedling weights are typically approximately normal (Fig. 5, top row).

Frequency distributions of plant weights for flax, Linum usitatissimum, sown at three densities. Y-axis = percent of the population in each weight class. Heavy black bar represents the mean plant weight. Top row: seedlings harvested 2 weeks after emergence; weights in mg. Middle row: 6-week-old plants; weights in mg. Bottom row: mature plants; weights in g (Figure from Harper (1977))
Variation in seedling size exists because seed sizes are rarely uniform, and the size of a seed has a strong influence on the size of the seedling that emerges from it (Hutchings 1997). Over time, as seedlings grow, their weight distributions tend to become increasingly skewed (Fig. 5, middle, bottom rows), especially at higher densities, for several reasons (Hutchings 1997). First, there is genetic variation for growth rate among a group of individuals. Second, the timing of a seedling’s emergence relative to that of its closest neighbors can give certain seedlings an initial growth advantage or disadvantage. Third, the spacing of a growing plant’s immediate neighbors determines the amount of resources available to it. For all these reasons, many individuals may remain small, spindly, and fail to flower or produce seeds. This effect is most extreme and rapid in high-density populations (Fig. 5, right-hand column).
Over time, the death of some of the small individuals in a dense population can allow other individuals to achieve larger size, and it is common to observe the size structure of such populations shifting over time as shown in Fig. 5. Mortality resulting from competition simultaneously alters the population density. Thus density and individual plant weight change in concert. In many populations this process of “self-thinning” has been shown to follow a temporal pattern represented by the relationship
where w represents mean individual plant weight, N is density of surviving plants, and c is a constant that varies among species. The value of the parameter k is approximately 3/2 for a wide range of plant species (Harper 1977). Differences in plant size caused by intraspecific competition ultimately lead to differences in performance. These differences among individuals within a population can have important effects on the potential of a population to change in numbers in the future.
Temporal Patterns of Population Dynamics
The size of any population changes over time because individuals are born and die and/or migrate into or out of the population. In other words,
where Nt+1 = a population’s size or density at time t + 1, Nt = its size/density one unit of time (usually a year) earlier, B = the number of births, D = the number of deaths, I = the number of immigrants into the population, and E = the number of emigrants from the population during the period between t and t + 1. Because plants are sessile, changes in the size of a plant population are typically much more influenced by births and deaths than by immigration/emigration (though the influence of dispersal will be addressed in section “Spatial Patterns of Population Dynamics”).
It is easy to imagine that most plant populations must be in a state of equilibrium (Nt+1 = Nt), with births balancing deaths (Fig. 6).

A hypothetical population with little or no change in numbers with time
Dramatic changes in the abundance of plant species are rarely observed. But long-term monitoring of plant populations reveals that few populations are static, at least not for long, and that even those that appear static are actually undergoing considerable turnover (Silvertown and Charlesworth 2001). Static populations tend to be restricted to species where individuals are long-lived, like trees, to habitats that rarely experience disturbances and to locations where environmental conditions are predictable from year to year. Few species or environments fit this description.
Instead, the sizes of plant populations typically fluctuate over time, either deterministically, stochastically, or both. Some populations appear to be increasing in numbers (Fig. 7); others appear to be decreasing (Fig. 8).

A hypothetical population in which numbers of individuals are increasing with time

A hypothetical population in which numbers of individuals are decreasing with time
Over longer time periods, the same population can display both patterns. Often superimposed on these trends, and also evident in populations with little overall change, is an unpredictable “wobble” in numbers of individuals (Fig. 9).

A hypothetical population with unpredictable fluctuations but no overall trend in numbers with time
Causes of Different Temporal Patterns of Plant Population Dynamics
What causes these different patterns? One important approach to understanding patterns of population dynamics is to build mathematical models that vary in the assumptions they make about the forces that might influence a population’s dynamics and then to compare the dynamics of model populations to information about natural populations obtained by regular censuses.
A model is simply a mathematical representation of a hypothesis; assumptions about possible forces at work are represented as elements of that mathematical expression. The goal of model building is to develop a model: (a) that is as simple as possible, (b) that captures the essential forces responsible for a population’s dynamic behavior, and (c) that omits details that do not provide additional explanatory power. Such a model will concisely explain the reasons for a particular pattern of population dynamics.
This section will consider a series of such models/hypotheses, starting with simple ones and moving on to models of increasing complexity and realism. The simpler models, so-called unstructured models , treat all individuals as equal, ignoring demographic characteristics such as size differences among individuals. While such models may be unrealistic, they provide an important foundation upon which to build more realistic versions. The more complex versions, so-called structured models , incorporate demographic variation among individuals.
The simplest representation of population growth is the geometric model :
where λ = the population’s net reproductive rate, i.e., the ratio of Nt+1 to Nt. In Eq. 3, λ is a constant; in other words, this model contains the implicit assumption that the population’s net reproductive rate does not change as a function of the population’s size, and is not influenced by changing environmental conditions. This model can be generalized to longer time periods:
A population with λ > 1 is increasing geometrically (see Fig. 10), one with λ < 1 is decreasing geometrically (see Fig. 11), and one with λ = 1 is not changing in size. Because this model is in the form of a difference equation, it is a particularly apt way to describe a population whose size grows (or shrinks) in “spurts” that occur once a year. This is the case, for example, for annual species in which individuals live for one growing season, produce seeds, and die at the end of that season, their seeds germinating at the beginning of the next growing season.

A hypothetical population with an initial size, N0, of 1,500 individuals and an annual growth rate, λ, of 1.09

A hypothetical population with an initial size, N0, of 3,000 individuals and an annual growth rate, λ, of 0.91
It is also possible to express the hypothesis that the population growth rate is a constant in continuous time, a form that some readers may find more familiar:
In this continuous-time model of exponential (i.e., geometric) population growth, r is a parameter known as the intrinsic or instantaneous rate of increase and is defined as the difference between the per capita birth and death rates. A growing population has an r > 0, while a declining one has an r < 0. This model produces the same results as those shown in Figs. 10 and 11 except that the change in population size is continuous rather than stepwise. For more about the correspondence between the difference-equation and continuous-time forms of the geometric/exponential growth model, see Begon et al. (1996).
When a population’s dynamics fit the pattern of change in numbers over time shown in Fig. 10, it suggests that necessary resources are superabundant relative to the resource requirements of individuals in the population. This pattern can be observed in plant populations that have recently colonized an environment where competitors and predators are rare and where resources are temporarily superabundant, such as species occupying a recently abandoned agricultural field, a newly logged forest, or the site of a recent fire, flood, or other catastrophic disturbance. Many species are specifically adapted to these habitats and are rarely seen in other circumstances, surviving from disturbance to disturbance by means of long-lived seed banks.
However, few populations exhibit a pattern of geometric growth for more than a short time; no population is capable of increasing forever without limit. One obvious cause of population decline is a directional change in the suitability of the environment resulting from successional change, e.g., as a meadow is colonized by shrubs and trees, herb and grass species decrease in abundance. It is more challenging to understand changes in numbers that occur in environments that are not undergoing such obvious environmental change.
Populations that experience a positive growth phase at first are often limited (eventually) by abiotic or biotic factors. Some of these factors act with an intensity that is independent of the size of the population subject to them; these are often referred to as density-independent limiting forces . For example, a severe drought might cause the death of all of the seedlings whose roots failed to reach a particular soil depth, no matter whether the density of seedlings was relatively high or relatively low. A late frost might cause the abortion of all the developing seeds in a population. Density-independent mortality can periodically reduce the size of a population; Fig. 12 shows population trends for Linanthus parryae , a desert annual, in the Mojave Desert of southern California, USA. The years when no adults were recorded had extremely low rainfall; the population persisted during these periods by means of dormant seeds. It is hard to imagine a population in which density-independent forces have no effect on population density or dynamics. However, while density-independent mortality sources can limit the size of a population, they cannot regulate it (Watkinson 1997).

Changes in plant density of Linanthus parryae over 10 years (Data from Schemske and Bierzychudek 2001)
What Forces Regulate the Sizes of Plant Populations?
Many populations appear to be regulated, i.e., to behave as though there were upper and lower bounds on their size, in that the population tends to return to its previous size or density following a perturbation. The population of the fast-growing annual Poa annua shown in Fig. 13, for example, has reached a more or less stable density in a relatively short time. Density-independent mortality sources cannot explain the existence of these bounded patterns. To understand regulated patterns of population dynamics, it is necessary to look to forces whose effects are proportionally more severe when the density of a population is high than when it is low, i.e., forces whose effects are density dependent.

Changes in density (on a log scale) of Poa annua colonizing abandoned land (Data from Law (1981), figure redrawn from Watkinson (1997))
For example, a plant seed might not germinate successfully unless it falls in a safe site, a microsite that has the appropriate physical and biological conditions that will permit a seedling to emerge safely from a seed (Harper 1977). Because any environment contains a limited number of safe sites, the mortality rate from failure to land in a safe site will be greater when large numbers of seeds are produced than when few seeds are produced (Fig. 14). Or, consider a fungal pathogen that infects and kills individual hemlock trees that are too weak to mount a defense. An individual tree is less vulnerable to infection in a population where individuals are widely spaced than in one where trees are crowded and sunlight or nutrients are in short supply. Thus mortality due to fungal attack may be density dependent. Finally, when the number of adult plants is small, each individual will grow larger and produce more seeds than when individuals are denser (Fig. 14). All these forces tend to dampen variations in population density and thus to regulate population numbers.

Schematic diagram illustrating the role of density-dependent forces in regulating population density (Figure reprinted from Silvertown and Charlesworth 2001)
Because so many plant populations appear to be regulated in some way, the existence of density dependence has been investigated in a wide range of species. Both observational and experimental approaches have been used. Two kinds of observational studies have provided evidence for density-dependent population regulation. First, ecologists have looked for positive correlations between plant size and interplant distance, considering such patterns to be evidence that plant size is controlled, to some degree, by the intensity of competition with neighbors. Other kinds of observational studies have taken advantage of natural variation in population density, either in time or in space, to determine whether and how a population’s birth and death rates vary with density. However, tightly regulated populations are expected to exhibit little natural variation in density; thus the stronger the regulation, the harder it is to detect (Silvertown and Charlesworth 2001). Another shortcoming of both kinds of observational studies is that spatial variation in environmental factors could complicate the interpretation of observed trends (Antonovics and Levin 1980). An alternative approach has been to alter density experimentally, either in the field or in the greenhouse, and to measure how survival and fecundity rates vary with density.
A large number of such studies have repeatedly demonstrated that variation in population density can have dramatic effects on individual growth rates, fecundity rates, and mortality rates (Harper 1977; Antonovics and Levin 1980). At relatively low densities, individual plants tend to exhibit few reductions in performance. However, at medium densities, reductions are often seen in growth rate and reproductive output. Finally, at relatively high densities, mortality rates can dramatically increase. For example, studies of how final biomass depends on the density of seeds originally sown have repeatedly confirmed the “law of constant final yield” (Fig. 15). Similarly, the relationship between plant weight and plant density represented by the “−3/2 self-thinning law” (Eq. 1) illustrates the powerful influence of density. Because these reductions are observed even in controlled environments where herbivores and parasites are absent, it is clear that these reductions are very often a consequence of resource competition among conspecific neighbors.

Relationships between original density of seeds or plants and the final yield biomass (in g) for clover, Trifolium subterraneum (top), and for a grass, Bromus unioloides (bottom) (Figure from Harper 1977)
The potential effect of intraspecific competition can be incorporated into the previous model of population growth, shown here in the form of a difference equation (contrast this with Eq. 3):
In this so-called logistic model, a equals (λ − 1)/K, where K is the carrying capacity of the environment for the species (in units of numbers of individuals). This model differs from the geometric model only in its modification of the assumption that λ is a constant. The logistic model assumes that the growth rate is equal to λ when Nt is near 0 and that it decreases linearly toward 1 as Nt approaches K. The logistic model generates the population dynamics shown by the closed circles in Fig. 16. A derivation of this model can be found in Begon et al. (1996).

These two hypothetical populations show the contrast between geometric and logistic growth. The population represented by open circles is growing geometrically at an annual rate, λ, of 1.09. The population represented by the closed circles is growing logistically at the same annual rate, λ, of 1.09, but with K = 3,000, i.e., α = 0.0003
Some readers may be more familiar with the continuous-time form of the logistic model,
Equation 7 contains the same assumption about the linear dependence of the population growth rate on N as does Eq. 6. Both models predict that a population’s numbers should grow until they reach an equilibrium size (K), at which point deaths balance births. The observation in nature of a trajectory like that in Fig. 13 implies that a population’s dynamics are largely governed by intraspecific competition for one or more limited resources. Many populations that initially display a pattern of geometric growth eventually reach a more or less stable size like that predicted by the logistic model.
Resource competition is not the only biotic interaction potentially capable of regulating plant populations; interactions with enemies like herbivores, seed predators, and plant parasites such as fungi and bacteria also have the potential to act as regulatory forces. An influential paper by Hairston et al. (1960) argued that the fact that plants generally appear “abundant and largely intact” implied that it was unlikely that plant populations could be regulated by their enemies. However, this argument has been challenged for many reasons (see review by Crawley 1989). Indeed, it is often assumed that natural enemies can regulate plant populations; for example, efforts to use biological control to reduce weed populations are grounded in this assumption (Halpern and Underwood 2006). In addition, a popular hypothesis to explain why plant species that have been transported from their native location to a new geographical region often become invasive is the “enemy release hypothesis .” This hypothesis proposes that movement to a new location releases nonnative species from the regulatory effects of the enemies that held them in check where they were native.
The relative importance of natural enemies in regulating plant populations remains controversial, however, because they have been less well investigated experimentally. Much of the evidence supporting the role of natural enemies comes from large-scale releases of herbivores for purposes of weed control; such releases are neither randomized nor replicated. Better evidence comes from controlled experiments in which plants in plots protected from herbivore activity by caging or insecticide application are compared to plants in unprotected control plots. The results of such studies have been mixed, with vertebrate herbivores typically exerting stronger regulatory effects than insects and some studies showing no evidence for herbivore regulation (Crawley 1989). Because these methods of herbivore exclusion have been shown to have unintentional treatment effects, even those studies implicating herbivores as important do not necessarily provide compelling evidence for the role of natural enemies in regulating plant population dynamics (Crawley 1989). Additionally, such studies are often limited to measuring the impact of enemies on individual plant performance, and their results cannot easily be “scaled up” to provide insights about the regulation of entire populations. For example, a herbivore that reduces an individual’s seed production might not affect the population’s dynamics if the availability of safe sites limits the numbers of seeds that can germinate successfully (Crawley 1989; Halpern and Underwood 2006). Finally, studies investigating the effect of natural enemies on plant performance rarely investigate whether such effects are density dependent, as they must be if they are to be able to regulate plant population dynamics (Halpern and Underwood 2006). The role of natural enemies in regulating plant populations is an important area in need of additional investigation, especially because the findings of these efforts have important implications for the control of pests and the management of plant invasions (Halpern and Underwood 2006).
The Role of Stochastic Influences, Especially in Small Populations
In addition to seeking to understand the forces that regulate sizes or densities of plant populations, plant ecologists are also interested in understanding the role of stochastic influences on population dynamics. Such influences are especially important in small, at-risk plant populations. Ecologists recognize two kinds of stochastic influences. Environmental stochasticity refers to erratic, unpredictable variation among years in abiotic and biotic parameters such as rainfall, temperature, winter snow depth, dates of first and last frost, or population sizes of predators, parasites, or interspecific competitors. These forces can be thought of as external to the population, and they affect all individuals in similar ways. Environmental stochasticity, on short or long time scales, leads survival and recruitment rates to vary from 1 year to the next, producing temporal patterns like that in Fig. 9. All natural populations, regardless of their size, are influenced to some degree by environmental stochasticity.
In contrast to environmental stochasticity, demographic stochasticity refers to variation in vital rates arising from chance differences in the fates of different individuals; this kind of variation arises from within the population itself rather than from external forces. For example, an average plant in a population might be expected to produce 100 seeds, but not every plant conforms to this average. Some might make more than 100 seeds, some fewer. Demographic stochasticity is primarily a concern for small populations, because in large populations, there are abundant opportunities for these random deviations from the mean to cancel one another out. For this reason, large populations are much more likely to follow the law of averages. In a small population, however, it is likely that these random interindividual differences will lead to deviations in the numbers of deaths or births in different years and thus to a population size that varies randomly from 1 year to the next. Since small populations also experience environmental stochasticity, they can fluctuate in size to a considerable degree between years. This fluctuation is important because it greatly increases their vulnerability to extinction.
The way environmental stochasticity affects population dynamics, and thus a population’s extinction risk, is important but somewhat counterintuitive. Temporal fluctuations in vital rates do more than cause a population’s dynamics to be more variable over time; they can actually cause a population to grow more slowly than it would in the absence of variability. Morris and Doak (2002) illustrate this effect using the following example. Imagine a population of 100 individuals with an annual growth rate, λ, that can take one of two values, 0.86 and 1.16, each value occurring with a 50 % probability. The average of these two values is 1.01; thus, we might reasonably expect that this population would have 14,477 individuals 500 years in the future:
However, the population will not grow at a rate of 1.01 every one of these 500 years. Each year, it will grow either at a rate of 1.16 or 0.86. If λ = 1.16 in exactly 250 years, and 0.86 in the other 250, which is quite probable, the population would in fact have only 54 individuals 500 years from now, a huge difference from the calculation in Eq. 8:
Of course other outcomes are possible in this probabilistic scenario, but this one is the most likely. It is no accident that the computation that accounted for variation in λ predicted a smaller population than the computation using the mean; incorporating stochasticity into models of population growth makes it likely that populations will do worse than they would in a deterministic model (Morris and Doak 2002).
In the preceding example, the simple average of the two values of λ, 1.01, generated a very poor (and wildly overoptimistic) prediction of the population’s future dynamics. This simple average (the sum of n values divided by n) is also known as the arithmetic mean. A less-familiar mean is the geometric mean (the nth root of the product of n values). The geometric mean of 1.16 and 0.86 is 0.9988, and using it instead of the arithmetic mean generates a more accurate prediction of the population’s growth rate in the face of environmental stochasticity:
The geometric mean of a series of numbers is always less than or equal to the arithmetic mean. That the geometric mean λ yields a more accurate population prediction should make sense, given that population growth is a multiplicative process.
As this example illustrates, a population experiencing temporal variability in vital rates might decline over time, even if in some years its growth rate, λ, is well above 1.0. This fact has important implications for the persistence of species of conservation concern. Using information about the amount of temporal variability a population experiences, a prediction can be made about the likelihood that a population will persist or go extinct within some specified time frame. Such information can also be used to identify effective management options. These investigations use a variety of modeling approaches collectively known as population viability analysis (PVA).
Over the last several decades, the development of models to assess the extinction risk of threatened or endangered populations has been one of the most active areas of research in plant (and animal) population dynamics. Morris et al. (1999) is an excellent introduction to some of the most commonly used PVA approaches, and Morris and Doak (2002) provide further elaboration; Brigham and Thomson (2003) provide a good, brief overview. PVA models allow λ to vary over a range of values from year to year, with that range representing the degree of environmental variation a population experiences. Such models cannot forecast the future size of the population with certainty; instead, they aim to forecast the probability that a population will achieve a particular size (or become effectively extinct) by some specified future time. The greater the interannual variability in population growth rates, the greater the uncertainty associated with these forecasts.
To illustrate this approach, some of the data in Fig. 2 for the Hawaiian silversword are analyzed here using the simple PVA for “count data” (i.e., unstructured data) presented in Morris et al. (1999). The data come from 11 permanent plots that were established on Mt. Haleakala in 1982 to permit long-term monitoring of the silversword population. All individuals in the plots were censused in 23 of the years between 1982 and 2010 (Krushelnycky et al. 2013). The population in Fig. 2 shown by the closed squares has fluctuated in numbers over the census period and since 2000 has appeared to be declining. What are the survival prospects for this population if current trends continue? The first step in performing a count-based PVA is to estimate values of μ, which is a stochastic version of the log of the population growth rate (see Morris and Doak 2002 for details), and of σ2, a measure of the stochastic variance in μ. Morris et al. (1999) and Morris and Doak (2002) provide formulas for computing these parameters. Following their procedure yields a value for μ of −.001. The fact that μ is negative means that the population will certainly go extinct; this is a reasonable expectation given the population trend evident in Fig. 2. But how much time will elapse before extinction occurs? To determine the likely time frame for this event, the cumulative distribution function (CDF) of extinction probabilities can be estimated (code for this computation is available in the R package “popbio”). To estimate a CDF, it is important to define an extinction “threshold,” i.e., a number of individuals below which the population becomes effectively extinct. In this example, that threshold has been set to four individuals. The resulting CDF, shown in Fig. 17, illustrates that without active management of some kind, this population of Hawaiian silverswords is likely to be extinct within 200 years.

The cumulative distribution function of extinction probabilities for the Hawaiian silversword population represented by the closed squares in Fig. 2. The population appears likely to be extinct within 200 years if current trends continue
Incorporating Population Structure into Models and Analyses
Even these more complex models incorporating stochastic variation described in the previous section are relatively simple in that they are unstructured. They track total population numbers, treating all individuals as making the same contribution to population growth, ignoring the fact that individuals can vary with respect to the demographic parameters introduced in section “Structure of Plant Populations.” Structured models of population dynamics take a different approach, tracking the vital rates of different age, stage, or size classes separately and making predictions not only about how the size of an entire population might change under different assumptions, but also about how the abundances of each class are expected to change. A great deal of research in plant population dynamics over the last several decades has made use of these models.
Structured models are based on the notion of a life table , a convenient way to summarize demographic information for age-structured populations. First developed for human populations, life tables contain information on how probabilities of survival and reproduction vary with an individual’s age. A life table summarizes data collected during repeated regular censuses of a cohort, which is a group of individuals all born at the same point in time. This information can then be used to calculate the cohort’s (and, by extension, the population’s) rate of increase.
Each age is represented as a separate row in a life table (see Table 1), and information on the survival and fecundity for each age is organized as a series of columns. The first column of a life table contains the ages (x) of individuals in the cohort, with x = 0 representing the age of a newborn individual. (Because seeds are so hard to observe, “birth” in plant life tables is often defined as the appearance of a seedling.) While censuses are often conducted annually for organisms in seasonal environments, census intervals may be chosen to be shorter (as in Table 1) or longer than a year, depending on the life history of the organism. The life table here is for an annual grass, Poa annua, and censuses were carried out every three months.
At each census, the numbers of survivors of the cohort are counted. These data are presented in the second column (ax). The original number of individuals in the cohort, 843 in this example, is a0. These values can be used to compute each age class’s age-specific survivorship, lx (ax/a0), which is the proportion of the original cohort that lives at least until age x. Age-specific fecundity, mx, is typically quantified as the mean number of seeds (or seedlings) produced per individual while it is age x.
The symbols used to represent these different vital rates are unfortunately not standardized; some authors use Nx in place of ax or Bx in place of mx. Likewise, survivorship (lx) is sometimes represented as the proportion of a cohort still alive, as is the case here, and other times as a standardized number of survivors from a hypothetical original cohort of 1,000. It is also worth noting that for organisms with separate sexes, life tables are based on the number of female offspring produced by a typical female, since the population growth rate in such species is typically determined by the rate at which females reproduce. Since most plant species are hermaphroditic, life tables for most plants need not make this distinction.
The data in a life table can be used to compute the cohort’s net reproductive rate, R0, the average number of offspring that a typical individual produces over its lifetime, i.e., per generation. The formula for R0 is
where k is the final age used in the life table. Note that R0 differs from a simple sum of the numbers of offspring produced at each age; it weights each reproductive episode by the likelihood that an individual will live to that age. The units of R0 are the expected numbers of offspring produced per newborn individual per generation. In order to convert R0 to λ or to r, the generation time, G, must be computed, as follows:
The relationship between R0 and λ is then
while the relationship between R0 and r is
It is important to note that life tables, like the simplest unstructured models presented in section “Causes of Different Temporal Patterns of Plant Population Dynamics,” assume that an individual’s fecundity depends only on its age and is not affected by population density. Thus a life table is implicitly a geometric growth model. In that sense, it can accurately compute a population’s current reproductive rate, but it might do a poor job of forecasting future reproduction. Secondly, because in many plants the correlation between age and size is not very strong (Gurevitch et al. 2002), life tables are not appropriate tools for the study of many plant populations; they are probably most appropriately applied to annual species, as in Table 1. However, they provide a useful introduction to other kinds of structured models.
Structured models of most plant species tend to use size classes rather than age classes. The use of size classes introduces some complications into the modeling process. In a life table, in which individuals are classified by their age, an individual can have only two possible fates between successive censuses: it may move into the next age class, or it may die. When individuals are classified by size rather than age, there are more possibilities. Between censuses, an individual may (a) move from a smaller size class to one or more larger size classes (“growth”), (b) move from a larger class to one or more smaller classes (“regression”), (c) remain in the same class (“stasis”), or (d) die. These complex possibilities are often displayed in the form of a life-cycle diagram. Figure 18 shows a life-cycle diagram for American ginseng, Panax quinquefolius, an herbaceous perennial. The arrows represent the possible changes that individual plants can undergo between successive censuses, as well as the fact that plants having at least two leaves can also produce seeds. Individuals that die between censuses are not shown in the diagram.

Life-cycle diagram for Panax quinquefolius, American ginseng. In this scheme, individuals are divided into six possible size classes. Information from annual censuses allows researchers to estimate the probability of each of the “transitions” represented by the arrows (Reprinted from Farrington et al. 2008)
To accommodate these complications, plant ecologists generally model a structured population’s dynamics with size-structured transition matrix models, also known as Leslie matrix models, Lefkovitch models, or simply matrix models. A “transition” is a period of time between successive population censuses, during which individuals in the population may undergo changes in their status, like those in Fig. 18. These models represent the population’s status changes during each of these transitions as a matrix of vital rates (Fig. 19). Each vital rage is estimated from annual censuses of individually marked plants. A transition matrix is square (i.e., it has equal numbers of rows and columns). There are as many rows and columns as there are size classes. Each entry in the matrix has two subscripts: the first (i) representing its row (i.e., the class it has transitioned to) and the second (j) representing its column (i.e., the class it has transitioned from). Each entry in the matrix, aij, represents the proportion of individuals originally present in class j that transitioned to class i between the first and second census.

A generic size-classified transition matrix model for a species with four size classes, not yet parameterized with data
Though a transition matrix does not explicitly include survival/mortality rates for each size class, the proportion of individuals in class j experiencing mortality between the two censuses can be calculated as
Conventionally, the first class in a transition matrix represents newborn individuals (i.e., individuals present at the second census that were not present at the first), so the entries in the top row of the matrix are zero until reproduction has been incorporated. The reproductive contribution of class j is defined as the mean number of class-1 individuals present at time t + 1 that were produced between the first and second censuses by individuals in class j at time t. Morris et al. (1999) and Morris and Doak (2002) provide clear accounts of how to construct a transition matrix from census data.
Figure 20 shows an example of a matrix (M) for a hypothetical plant population in which individuals can belong to any of three size classes. In this example, these transitions are possible: class-1 individuals can grow to class 2 or to class 3 or die; class-2 individuals can stay in class 2, grow to class 3, or die; and class-3 individuals can stay in class 3 or die. Only class-3 individuals can reproduce. Figure 20 also shows two vectors (columns of numbers). These vectors represent the population’s size structure, i.e., the numbers of individuals present in each size class at some particular census period. The sum of these numbers equals nt, the total number of individuals in the population at time t.

This example represents a population divided into three size classes. At time t there were 15 class-1 individuals, 30 class-2 individuals, and 100 class-3 individuals. Multiplication of the matrix M by the vector n t as shown produces a new vector, n t+1 , of 12.5 class-1 individuals, 11.745 class-2 individuals, and 101.155 class-3 individuals (since a fractional individual cannot exist, these are often rounded to the nearest whole number)
Matrix models place vital rate data into a matrix format so that the operations of matrix algebra can be used to project the population’s size structure into the future, given particular assumptions. When a transition matrix is multiplied by a vector that represents a population’s current size structure, the resulting vector gives the population’s size structure 1 year in the future. (Figure 20 shows how matrix multiplication is carried out.) Repeated multiplication of the matrix by the resulting vector (using mathematical software such as MATLAB or Mathematica) can project the population any number of years into the future. Iterative multiplication eventually yields a population size structure that is stable, in the sense that the proportion of the population in each size class does not change, even as the total population size continues to grow (or shrink). The dominant eigenvalue of the matrix, which can be easily computed with mathematical software, is equivalent to λ, the population’s rate of increase, the rate at which the population size will change once it has achieved its stable size structure. This one parameter, λ, integrates multiple vital rates into a single metric.
Because λ indicates whether a population is stable, increasing, or declining, it provides important basic information about a population’s status. Matrix models also allow researchers to determine other important information about a species. Through approaches known as sensitivity and elasticity analyses and life table response experiments (Caswell 2001), the contribution of individual vital rates or of particular matrix entries to the overall population growth rate can be assessed. These analyses allow researchers to explore the specific mechanisms underlying observed variation in λ over time or between different populations. More complex versions of these models can be created to incorporate the production of vegetative propagules, seed dormancy, and other life history variations.
But the growth in the use of matrix models since their introduction in the early 1970s is due particularly to their usefulness for guiding management (Crone et al. 2011). For the last several decades, conservation biologists have studied the population dynamics of plant species of conservation concern to better document the status of sensitive species of plants, to quantify extinction risk, to understand the causes of population declines, to explore possible ways to reverse those declines, and to assess the effects of possible changes in management or environmental conditions. For those charged with managing these species, managing invasive species, or setting guidelines for sustainable harvesting, λ provides important information about population status.
Furthermore, matrix models can allow a researcher to model the potential long-term effects of events that a natural or managed population might experience, such as herbivory, harvesting, controlled burning, etc. This can be done in a variety of ways. A sensitivity analysis allows ecologists to evaluate the effectiveness of management alternatives that are expected to alter particular elements in a matrix. Alternatively, potential management approaches can be simulated by repeatedly multiplying alternative matrices, representing different environmental states, in different orders (see the example of Hudsonia montana described below). Such information can help managers decide whether a particular harvesting rate is sustainable or how frequently to mow or burn a meadow or grassland they are managing for a sensitive species. For example, American ginseng is a plant that is harvested as a medicinal herb; its market value makes it a tempting target for illegal overharvesting. Farrington et al. (2008) modified vital rates in a matrix model to investigate how different levels of harvesting, in association with browsing by deer, influenced ginseng’s population growth rate.
For all of the reasons described above, matrix models have become the primary analytical tool for studying plant population dynamics; by 2009, well over 300 such studies had been published (Crone et al. 2011), and their numbers continue to grow. However, some caveats about the use of matrix models are in order. One of the assumptions of the basic transition matrix model is that the population’s vital rates as represented in the matrix will remain constant over the time frame over which λ is being projected. However, vital rates are not fixed; they vary from 1 year to the next, as a consequence of stochastic environmental variation. Two censuses – one transition – cannot capture the full range of environmental variation that a population experiences. Ecologists have invested considerable effort in developing ways to incorporate this year-to-year variation in vital rates into matrix models.
There are two general approaches for incorporating environmental variability into matrix models; both require census data from multiple years. The first approach is to construct a series of transition matrices, one for each pair of censuses. Then, λ is computed by computer simulation, by drawing individual matrices at random (with replacement) from the pool of those available. The second approach is to represent each vital rate in the matrix as a random variable capable of taking on a range of possible values (determined using census data from multiple years) and then to use computer simulation to create a unique matrix from these ranges of allowable values for each time step in the simulation. In both approaches, because the sequence of matrices used will affect the value of λ, researchers compute the mean and variance of λ from a large number of simulations (1,000 or more). These approaches thus also provide researchers with important information about the uncertainty associated with their estimates of λ. Both approaches to incorporating temporal variability in vital rates have strengths and weaknesses and many variations (see Morris and Doak 2002).
A good example of the utility of the matrix model approach for the management of threatened species is provided by a study of mountain golden heather, Hudsonia montana, a threatened shrub from North Carolina, USA (Gross et al. 1998). Once thought to be extinct, H. montana was rediscovered in 1979. The reasons for its low numbers were hypothesized to be either competition from other plants as a result of fire suppression and/or trampling by hikers and campers. Gross et al. (1998) used matrix modeling to address these questions about H. montana: How can recovery be achieved? Would protection from trampling be sufficient to permit recovery? Can the implementation of controlled burns achieve recovery? Must both strategies be implemented? If controlled burns are important, given their high cost, what is the least frequent burn interval that can achieve a positive population growth rate? Gross et al.’s (1998) study used census data on H. montana collected over 5 years from an unmanipulated population as well as from one subjected to a controlled burn. Observations of the reasons for each observed mortality event allowed the quantification of trampling-caused mortality. Multiple censuses provided Gross et al. (1998) with data on vital rates in the burned population during the year of the burn as well as 1 and 2 years afterward.
Gross et al. (1998) performed both a deterministic analysis as well as one that incorporated stochastic variability by treating each vital rate as a random variable. In the deterministic analysis, they created different matrices that represented populations subject to one of three levels of trampling (no reduction from current levels and 50 % and 100 % reductions of trampling mortality) in non-burn, burn, and postburn years. By multiplying different matrices together, they created product matrices that simulated a variety of burn scenarios (e.g., burning every other year, every 5th year, every 10th year) in combination with any of the three trampling scenarios and computed λ for each one. In their stochastic analysis, they explored 39 different management strategies, consisting of the three different trampling levels combined with 13 different burn scenarios, ranging from no burning to control burns carried out at intervals of between 1 and 20 years.
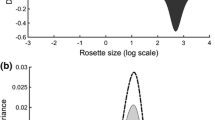
The study’s results demonstrated that neither management strategy by itself was sufficient to reverse the decline of H. montana (Fig. 21). However, they found that population growth (λ > 1) was possible if burning was combined with the elimination of some or all of the trampling. While one burn every 6–8 years was predicted to maximize H. montana’s growth rate, Gross et al. (1998) found that decreasing the burn frequency to as much as once every 12–16 years would still allow the numbers of this threatened plant to increase. The stochastic analysis produced a somewhat more optimistic outlook (compare Fig. 21) than the deterministic one. This finding runs counter to the idea described in section “The Role of Stochastic Influences, Especially in Small Populations” that incorporating environmental variability often leads to forecasts of slower population growth. This result could be due to the nature of the variability in this particular example or to negative correlations in the variability of different vital rates (Doak et al. 2005).

The annual population growth rate, λ, of Hudsonia montana as a function of simulated burn cycle length and level of trampling reduction for deterministic (a) and stochastic (b) transition matrix models. Dashed lines in a represent the population growth expected while the population achieves a stable size distribution
Gross et al. (1998) asked what strategies would be effective in reversing H. montana’s observed decline. The same data can be used to carry out a PVA. The goal of such an analysis is to forecast the probability of extinction if no management were implemented. Morris and Doak (2002) reanalyzed Gross et al.’s (1998) data to produce such a forecast. Incorporating environmental variability by using a matrix-selection approach, Morris and Doak (2002) computed the cumulative probability of extinction (which they defined as the population’s falling below 500 individuals, since most of the “individuals” are dormant seeds in the soil) as a function of time. They found that, in the absence of any management action, the population has nearly a 50 % probability of extinction within 50 years (Fig. 22). Methods for these and other analyses using matrix models can be found in Caswell (2001) and in Morris and Doak (2002), and code for carrying them out is available in the R package “popbio.”

The incorporation of environmental variability is not the only important concern when using matrix models. Another assumption of matrix models is that the population has attained a stable size distribution. Until this occurs, the actual population growth rate can be quite different and either larger than or smaller than λ. A population in a highly variable environment may not have the opportunity to achieve a stable size distribution, in which case the λ generated by a matrix model may provide a poor forecast of population behavior. However, Williams et al. (2011) surveyed data from 46 plant species and found that most were near their stable size distributions. For populations that are not, methods of transient analyses (references in Williams et al. 2011) can be used to arrive at forecasts of population growth rates.
Thirdly, it is important to recognize that while these models are structured, they are variations of the simple geometric growth model first presented in section “Causes of Different Temporal Patterns of Plant Population Dynamics,” in which λ is assumed to be independent of population density. In that section, it was acknowledged that the geometric model is quite unrealistic. However, measured values of λ for plant populations tend to center around 1.0 (Crone et al. 2013), which implies that most of the populations analyzed using these models are not changing in size very rapidly; therefore, the geometric model may often be an appropriate one. For species of conservation concern, whose population sizes are by definition well below K, the assumption of a lack of density dependence is certainly appropriate, justifying the widespread use of these models for this purpose. Nevertheless, it is clear that there are some kinds of plant populations for which this density-independent approach is unsuitable. For this reason, density-dependent versions of matrix models have been developed (Caswell 2001: Morris and Doak 2002).
The widespread use of matrix models, coupled with an appreciation of their limitations/assumptions, has raised questions about their value and applicability. Crone et al. (2013) used long-term data from 20 plant species to compare the forecasts of matrix models for these species with their observed population dynamics. They concluded that matrix models provided a good integration of a population’s vital rates during the time period during which those vital rates had been estimated and that λ was indeed a suitable way to assess a population’s status and to evaluate management options. However, they found that in many instances, matrix models failed to accurately forecast future population sizes. In evaluating the possible causes of this failure, Crone et al. (2013) ruled out density dependence and shortcomings in the number of sampled plants or census years, two often-cited concerns about matrix models.
Instead, they concluded that the most plausible explanation for why matrix models sometimes fail to accurately forecast future population behavior is that the assumption of environmental constancy (even allowing for stochastic variation about some mean) is not met (Crone et al. 2013). Especially in the face of the environmental changes in temperature and precipitation currently occurring as a result of anthropogenically increased levels of atmospheric CO2, it is clearly desirable to develop ways to incorporate the likely effects of directionally changing environmental parameters into models of population dynamics.
Krushelnycky et al. (2013) took such an approach to try to understand the reasons why, after such a successful population recovery, the Hawaiian silversword population has once again begun to decline. Since climate data indicated that conditions on the volcano had become drier and warmer over time, they investigated this possible cause for the declining population growth rate by modeling the dependence of annual values of λ on various measures of rainfall and temperature. They found that λ was positively correlated with the number of wet season days having >10 mm of rainfall and negatively correlated with the number of rainless days during the dry season. However, λ was also negatively correlated with the number of rainy season days where rainfall exceeded 15 mm. These associations explained 64 % of the observed variation in λ. Population growth rate did not depend significantly on temperature. These results suggested that changes in rainfall patterns are affecting the persistence of the silversword population, though not in a straightforward way. The authors concluded that the view of the Haleakala silversword as “secure” is no longer justified, now that global climate change has begun to significantly affect rainfall patterns on the volcano. Despite successful efforts to address earlier threats of vandalism and grazing, it now seems that the silversword has a bigger problem, one not so easily solved by building fences or educating visitors; climate change appears to be causing most of these high-altitude populations to decline (Krushelnycky et al. 2013).
Increasingly, plant ecologists are looking for ways to incorporate the role of changing environmental factors into their analyses of past population dynamics, as in the above example, as well as into forecasts of future dynamics. For example, Salguero-Gomez et al. (2012) used structured demographic models, coupled with high-resolution climatic models projecting future global changes in temperature and precipitation, to assess how these climatic changes would be likely to affect two species of desert plants, one from Utah in southwestern North America and one from Israel’s Negev Desert. Their surprising result was that projected changes in precipitation in these regions (increases in Utah, decreases in Israel) were expected to lead to increased population growth for both plant species (Salguero-Gomez et al. 2012).
Spatial Patterns of Population Dynamics
Up until now, the emphasis in this chapter has been on how births and deaths contribute to changes in the size or density of plant populations. Immigration and emigration, though included in Eq. 2, have been ignored. But just as population densities vary in time, they can also vary spatially. Ecologists are discovering that this spatial variation is fluid rather than static. They are asking questions about what determines these patterns and developing tools to study them.
The study of spatial patterns of population dynamic s is driven in large part by the recognition that suitable habitat for many species is fragmented rather than contiguous. The fragmentary nature of suitable habitat is caused not only by natural physical phenomena (e.g., variation in parent material of soil, in elevation and hydrology, and the ephemeral nature of many habitats) but also, very importantly, by human activities like urban and agricultural development, forest harvesting, etc. Such anthropogenic habitat fragmentation has been recognized as one of the greatest threats to species diversity. Regardless of the cause of patchiness, many plant species are distributed within discrete patches of suitable habitat embedded in an unsuitable habitat matrix; these patches can be connected by the dispersal of seeds and/or pollen. Understanding the persistence of species in fragmented habitats often requires adopting a spatial perspective that includes more than a single local population.
Regional assemblages of populations of the same species can take many forms. The best-studied type of regional population assemblage is the metapopulation. A metapopulation is a network of relatively small, local subpopulations connected by migration. Because of their small size, individual subpopulations within the larger metapopulation are prone to local extinction. Metapopulation theory has led to the conclusion that in order for a metapopulation to persist over the long term, there must be asynchronous, reciprocal dispersal between existing subpopulations and from existing subpopulations to unoccupied patches of suitable habitat and that the density of suitable habitat patches must exceed some threshold (Freckleton and Watkinson 2002). The dynamics of the entire metapopulation are determined by these processes of extinction, dispersal, and recolonization and thus are not a simple function of the collective dynamics of local populations (Freckleton and Watkinson 2002). Likewise, the dynamics of local populations that are part of a metapopulation cannot be completely understood without adopting a metapopulation perspective.
While metapopulation theory has had a strong influence on how animal populations are studied, there are limited numbers of studies of plant populations that take a metapopulation perspective, in part because the existence of seed dormancy in many plant species complicates the quantification of extinction rates (Husband and Barrett, 1996) and also because it is difficult to recognize what constitutes a suitable habitat patch when it is unoccupied (Freckleton and Watkinson 2002). Another way in which regional assemblages of plant populations may differ from those of animals is that plants and their propagules are often very long-lived, and their dispersal abilities are more limited than those of animals; thus processes such as extinction and colonization may take place on much longer time scales. Consequently, few studies have attempted to measure colonization, extinction, and recolonization rates and the density of suitable habitat patches for regional assemblages of plant species (Freckleton and Watkinson 2002; Ouborg and Eriksson 2004). In fact, the very applicability of the metapopulation concept to plant species continues to be the topic of vigorous debate (Husband and Barrett, 1996; Freckleton and Watkinson 2002; Ouborg and Eriksson 2004).
Determining whether a particular plant species has a true metapopulation structure is more than an academic concern; it has important implications for how species conservation should be approached. For species that exist as metapopulations, it is inevitable that local populations will go extinct, so conservation efforts must not only protect existing subpopulations; they must also protect unoccupied but suitable habitat and conserve dispersal opportunities (e.g., through the creation of corridors). This is not necessary when local processes dominate spatial dynamics.
In addition to metapopulations, ecologists recognize other kinds of regional population assemblages. For example, some species occupy networks of habitat patches in which dispersal is primarily one way. Such networks (termed “source-sink” or “mainland-island” models ) can persist if there are one or more source populations (where reproduction rates typically exceed mortality rates) that periodically provide emigrants to sink populations (where mortality rates typically exceed reproductive rates). In other species, different subpopulations may be so isolated from one another that the subpopulations are more or less unconnected and regional-scale spatial dynamics are governed almost completely by the dynamics of local populations. Finally, there are species that do not occupy distinct habitat patches, but exist as spatially distinct subpopulations within an essentially continuous habitat; spatial dynamics in this case are also governed largely by local processes (Freckleton and Watkinson 2002; Ouborg and Eriksson 2004). Given the importance of understanding spatial population dynamics to ecology, evolution, and conservation, the study of metapopulations in particular and of spatial dynamics in general is and will continue to be an active area of ongoing research in plant ecology (Ouborg and Eriksson 2004).
A Brief Guide to Methodological Approaches Used in Field Studies of Plant Population Dynamics
Defining the Boundaries of a Population
A population is a group of individuals belonging to the same species. How do ecologists determine the boundaries of a population? Sometimes boundaries are obvious, e.g., when a plant species lives on an island or in a natural area surrounded by developed land. But other times, a population’s boundaries are not so obvious; in these situations, ecologists define the boundaries of a population somewhat arbitrarily. Knowledge of the typical dispersal distance of seeds, or of the flight distance of pollinators, can be helpful in defining boundaries. In practice, ecologists usually define boundaries as regions where a population’s density falls off. Unless the population of interest is assumed to be closed to immigration/emigration, such a loose definition does not usually present a problem. The concept of a population is, after all, a human construct.
Anyone who studies population dynamics must make choices about how many and which populations to include in their study. These might be a random sample of known populations, or populations might be chosen because of some factor of interest that is being investigated. Issues that arise in sampling from a set of possible populations are addressed by Morris and Doak (2002).
Censusing Populations
In the beginning of this chapter, repeated censuses were described as being at the heart of studies of plant population dynamics. Of course, annual censuses must be made at approximately the same time each year. Some studies of population dynamics (known as count-based studies) only require information about how the numbers of individuals in the population change over time. For these studies, it is not necessary to know how each individual plant’s status changes temporally and thus marking plants individually is unnecessary. It is not even necessary to count the numbers of seeds in the soil, because such censuses are useful as long as they represent counts of a constant fraction of the population each year (Morris and Doak 2002). If a population is at or near a stable size distribution (see section “Incorporating Population Structure into Models and Analyses”), this assumption is likely to be met and seeds can be ignored. However, careful records do need to be kept about the location of population boundaries, so repeated counts can be made in the same area. Count data are the easiest data to acquire and are the kinds of data most often collected by land managers responsible for monitoring sensitive species. Analysis of these data is done by means of unstructured models (see section “The Role of Stochastic Influences, Especially in Small Populations”).
However, it is relatively easy to track changes in the status of individual plants over time and thus to go beyond count-based studies to incorporate information on a population’s age or size structure and how it changes over time. [A video by plant ecologist James McGraw demonstrates some of these techniques using wild ginseng, Panax quinquefolium. http://www.youtube.com/watch?v=u3CxPUr6cy4.] These data can then be used to parameterize structured models (see section “Incorporating Population Structure into Models and Analyses”). Gathering such information typically requires marking each individual in the population (or a randomly chosen subset of individuals) with a unique number, usually by attaching numbered metal tags to the plants or inserting them into the ground nearby. A metal detector can be a useful tool for relocating buried tags. Alternatively, for very small plants, the corners of small sampling plots can be marked with nails and a pantograph, photograph, or other method used to locate and relocate particular individuals within the plot. However, rhizomatous plants and those whose position may be altered by burrowing animals or by frost heaving can move a surprising amount from 1 year to the next, making reliable re-identification difficult.
For structured population studies, decisions must be made about how to demarcate size classes or stages. This decision is partly based on convenience and feasibility, but it is also important to find a reasonable compromise between creating too few and too many classes. The more individuals in each class, the more accurately their vital rates can be estimated. But the wider the boundaries of the class, the more likely it is that the class will pool individuals of widely varying sizes, with divergent demographic fates. See Caswell (2001) and Morris and Doak (2002) for detailed advice about defining size class boundaries.
While most size classes are relatively easy to recognize, others are more problematic. Some perennial plants have underground corms or other perennating organs that, though alive, may remain dormant for one or more growing seasons. Distinguishing dormancy from mortality requires multiple census years. Accurately estimating individual fecundity can be difficult without repeated visits to a population at the time of seed production, and many species have seeds that remain dormant in the seed bank for anywhere from a few months to many years. Sometimes experiments involving buried seeds are necessary to quantify seed dormancy and survival rates. Other species form vegetative propagules (e.g., cormlets) that can be dispersed and must be accounted for. Each species requires its own set of methodological decisions.
Future Directions
Transition matrix models will continue to be an important way to study the dynamics of plant populations and to guide management decisions. Every year these models grow increasingly sophisticated (Salguero-Gomez and de Kroon 2010). Some of the newest developments include ways to represent networks of populations connected by dispersal, investigate the importance of ecological drivers of population dynamics, explore the transient dynamics of populations responding to changing conditions, and make better population forecasts in the face of temporal and spatial stochasticity.
Understanding the effects of climate change on plant population dynamics, in particular, is an area of high priority. Climate change is a long-term, uncontrolled experiment whose effects on population dynamics are of great scientific and practical importance. The large numbers of published studies making use of matrix models facilitate the asking of questions such as: can we make robust predictions about whether species in particular habitats or with particular life histories are more or less vulnerable to the effects of stochasticity or climate change than others?
In the study of population dynamics in general, advances in molecular technologies are making it possible to identify and quantify soil microorganisms, permitting researchers to begin to explore how interactions with soil biota determine plant population dynamics (Bever et al. 1997). And there are growing links between the study of population dynamics and other biological subdisciplines, such as community ecology, ecosystem ecology, and ecophysiology, with the goal of providing a greater mechanistic understanding of the processes underlying population dynamics and a better understanding of large-scale ecological processes.
References
Antonovics J, Levin DA. The ecological and genetic consequences of density-dependent regulation in plants. Annu Rev Ecol Systemat. 1980;11:411–52.
Begon M, Mortimer M, Thompson DJ. Population ecology, a unified study of animals and plants. 3rd ed. Oxford: Blackwell; 1996.
Beschta RL. Cottonwoods, elk, and wolves in the Lamar Valley of Yellowstone National Park. Ecol Appl. 2003;13(5):1295–309.
Bever JD, Westover KM, Antonovics J. Incorporating the soil community into plant population dynamics: the utility of the feedback approach. J Ecol. 1997;85:561–73.
Brigham CA, Thomson DM. Approaches to modeling population viability in plants: an overview. In: Brigham CA, Schwartz MW, editors. Population viability in plants. Berlin: Springer; 2003. p. 145–71.
Caswell H. Matrix population models: construction, analysis and interpretation. 2nd ed. Sunderland: Sinauer; 2001.
Chapin FS, McGraw JB, Shaver GR. Competition causes regular spacing of alder in Alaskan shrub tundra. Oecologia. 1989;79:412–6.
Crawley MJ. Insect herbivores and plant population dynamics. Annu Rev Entomol. 1989;34:531–64.
Crone EE, Menges ES, Ellis MM, Bell T, Bierzychudek P, Ehrlen J, Kaye TN, Knight TM, Lesica P, Morris WF, Oostermeijer G, Quintana-Ascencio PF, Stanley A, Ticktin T, Valverde T, Williams JL. How do plant ecologists use matrix population models? Ecol Lett. 2011;14:1–8.
Crone EE, Ellis MM, Morris WF, Stanley A, Bell T, Bierzychudek P, Ehrlen J, Kaye TN, Knight TM, Lesica P, Oostermeijer G, Quintana-Ascencio PF, Ticktin T, Valverde T, Williams JL, Doak DF, Ganesan R, McEachern K, Thorpe AS, Menges ES. Ability of matrix models to explain the past and predict the future of plant populations. Conserv Biol. 2013;27(5):968–78.
Doak DF, Morris WF, Pfister C, Kendall BE, Bruna EM. Correctly estimating how environmental stochasticity influences fitness and population growth. Am Nat. 2005;166(1):E14–21.
Enright N, Ogden J. Applications of transition matrix models in forest dynamics: Araucaria in Papua New Guinea and Nothofagus in New Zealand. Aust J Ecol. 1979;4:3–23.
Farrington SJ, Muzika R-M, Drees D, Knight TM. Interactive effects of harvest and deer herbivory on the population dynamics of American ginseng. Conserv Biol. 2008;23(3):719–28.
Freckleton RP, Watkinson AR. Large-scale spatial dynamics of plants: metapopulations, regional ensembles and patchy populations. J Ecol. 2002;90(3):419–34.
Gross K, Lockwood Jr JR, Frost CC, Morris WF. Modeling controlled burning and trampling reduction for conservation of Hudsonia montana. Conserv Biol. 1998;12(6):1291–301.
Gurevitch J, Scheiner SM, Fox GA. The ecology of plants. Sunderland: Sinauer; 2002.
Hairston NG, Smith FE, Slobodkin LB. Community structure, population control and competition. Am Nat. 1960;94:421–5.
Halpern SL, Underwood N. Approaches for testing herbivore effects on plant population dynamics. J Appl Ecol. 2006;43:922–9.
Harper JL. A Darwinian approach to plant ecology. J Ecol. 1967;55:247–70.
Harper JL. Population biology of plants. London: Academic; 1977.
Husband BC, Barrett S. A metapopulation perspective in plant population biology. J Ecol. 1996;84:461–9.
Hutchings MJ. The structure of plant populations. In: Crawley MJ, editor. Plant ecology. 2nd ed. Oxford: Blackwell; 1997. p. 325–58.
Krushelnycky PD, Loope LL, Giambelluca TW, Starr F, Starr K, Drake DR, Taylor AD, Robichaux RH. Climate-associated population declines reverse recovery and threaten future of an iconic high-elevation plant. Glob Chang Biol. 2013;19:911–22.
Morris WF, Doak DF. Quantitative conservation biology, theory and practice of population viability analysis. Sunderland: Sinauer; 2002.
Morris WF, Doak D, Groom M, Kareiva P, Fieberg J, Gerber L, Murphy P, Thomson D. A practical handbook for population viability analysis. The Nature Conservancy; Washington, DC, 1999.
Ouborg NJ, Eriksson O. Toward a metapopulation concept for plants. In: Hanski I, Gaggiotti OE, editors. Ecology, genetics, and evolution of metapopulations. Burlington: Elsevier Academic Press; 2004. p. 447–69.
Salguero-Gomez R, de Kroon H. Matrix projection models meet variation in the real world. J Ecol. 2010;98:250–4.
Salguero-Gomez R, Siewert W, Casper BB, Tielborger K. A demographic approach to study effects of climate change in desert plants. Philos Trans R Soc B Biol Sci. 2012;367:3100–14.
Schemske DW, Bierzychudek P. Evolution of flower color in the desert annual Linanthus parryae: Wright revisited. Evolution. 2001;55(7):1269–82.
Silvertown J, Charlesworth D. Introduction to plant population biology. 4th ed. Oxford: Blackwell; 2001.
U.S. Fish and Wildlife Service. Recovery plan for the Maui plant cluster. Portland: U.S. Fish and Wildlife Service; 1997.
Watkinson AR. Plant population dynamics. In: Crawley MJ, editor. Plant ecology. 2nd ed. Oxford: Blackwell; 1997. p. 359–400.
Williams JL, Ellis MM, Bricker MC, Brodie JF, Parsons EW. Distance to stable stage distribution in plant populations and implications for near-term population projections. J Ecol. 2011;99:1171–8.
Winnie Jr JA. Predation risk, elk, and aspen: tests of a behaviorally mediated trophic cascade in the greater Yellowstone ecosystem. Ecology. 2012;93(12):2600–14.
Further Reading
Brigham CA, Schwartz MW, editors. Population viability in plants: conservation, management, and modeling of rare plants. Berlin: Springer; 2003.
Caswell H. Matrix population models. 2nd ed. Sunderland: Sinauer; 2001.
Gibson DJ. Methods in comparative plant population ecology. Oxford: Oxford University Press; 2002.
Gotelli NJ. A primer of ecology. Sunderland: Sinauer; 2008.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer Science+Business Media New York
About this entry
Cite this entry
Bierzychudek, P. (2014). Plant Biodiversity and Population Dynamics. In: Monson, R. (eds) Ecology and the Environment. The Plant Sciences, vol 8. Springer, New York, NY. https://doi.org/10.1007/978-1-4614-7501-9_15
Download citation
DOI: https://doi.org/10.1007/978-1-4614-7501-9_15
Published:
Publisher Name: Springer, New York, NY
Print ISBN: 978-1-4614-7500-2
Online ISBN: 978-1-4614-7501-9
eBook Packages: Biomedical and Life SciencesReference Module Biomedical and Life Sciences