
Abstract
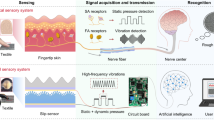
Tactile and slip sensors have gained tremendous attention for their promising applications in the fields of smart robotics, implantable medical devices and minimally invasive surgery. Inspired by the structure-enhanced sensing mechanisms of human fingertips and tree frog toes, we developed a tactile and slip sensor by combining biomimetic surface microstructures with highly sensitive P(VDF-TrFE) nanofiber sensors on a flexible polyimide substrate. As the surface microstructures could mediate the micro-vibration induced by slip motion, the frequencies of output signals revealed a strong correlation with the periods of microstructures. In addition, we proposed a method to discriminate touch force from slip motion using the criterion of standard deviation of time delay from the output signals of neighboring sensor elements.
Article PDF
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
References
Stassi S, Cauda V, Canavese G, Pirri C F. Flexible tactile sensing based on piezoresistive composites: A review. Sensors, 2014, 14, 5296–5332.
Kim D, Lu N, Ghaffari R, Kim Y, Lee S P, Xu L, Wu J, Kim R, Song J, Liu Z, Viventi J, de Graff B, Elolampi B, Mansour M, Slepian M J, Hwang S, Moss J D, Won S, Huang Y, Litt B, Rogers J A. Materials for multifunctional balloon catheters with capabilities in cardiac electrophysiological mapping and ablation therapy. Nature Materials, 2011, 10, 316–323.
Puangmali P, Althoefer K, Seneviratne L D, Murphy D, Dasgupta P. State-of-the-art in force and tactile sensing for minimally invasive surgery. IEEE Sensors Journal, 2008, 8, 371–381.
Eltaib M E H, Hewit J R. Tactile sensing technology for minimal access surgery–A review. Mechatronics, 2003, 13, 1163–1177.
Konstantinova J, Jiang A, Althoefer K, Dasgupta P, Nanayakkara T. Implementation of tactile sensing for palpation in robot-assisted minimally invasive surgery: A review. IEEE Sensors Journal, 2014, 14, 2490–2501.
Zareinia K, Maddahi Y, Gan L S, Ghasemloonia A, Lama S, Sugiyama T, Yang F W, Sutherland G R. A force-sensing bipolar forceps to quantify tool–Tissue interaction forces in microsurgery. IEEE/ASME Transactions on Mechatronics, 2016, 21, 2365–2377.
Althoefer K. Miniature 3-axis distal force sensor for minimally invasive surgical palpation. IEEE/ASME Transactions on Mechatronics, 2012, 17, 646–656.
Núñez C G, Navaraj W T, Polat E O, Dahiya R. Energyautonomous, flexible, and transparent tactile skin. Advanced Functional Materials, 2017, 27, 1606287.
Narendiran A, George B. Capacitive tactile sensor with slip detection capabilities for robotic applications. 32nd Annual IEEE Instrumentation and Measurement Technology Conference (I2MTC), Pisa, Italy, 2015, 464–469.
Li C, Wu P M, Lee S, Gorton A, Schulz M J, Ahn C H. Flexible dome and bump shape piezoelectric tactile sensors using PVDF-TrFE copolymer. Journal of Microelectromechanical Systems, 2008, 17, 334–341.
Qasaimeh M A, Sokhanvar S, Dargahi J, Kahrizi M. PVDF-based microfabricated tactile sensor for minimally invasive surgery. Journal of Microelectromechanical Systems, 2009, 18, 195–207.
Dargahi J, Sedaghati R, Singh H, Najarian S. Modeling and testing of an endoscopic piezoelectric-based tactile sensor. Mechatronics, 2007, 17, 462–467.
Wang Y R, Zheng J M, Ren G Y, Zhang P H, Xu C. A flexible piezoelectric force sensor based on PVDF fabrics. Smart Materials and Structures, 2011, 20, 045009.
Dahiya R S, Adami A, Collini C, Lorenzelli L. POSFET tactile sensing arrays using CMOS technology. Procedia Engineering, 2012, 47, 894–897.
Khan S, Tinku S, Lorenzelli L. Flexible tactile sensors using screen-printed P(VDF-TrFE) and MWCNT/PDMS composites. IEEE Sensors Journal, 2015, 15, 3146–3155.
Yi Z, Zhang Y. Bio-inspired tactile FA-I spiking generation under sinusoidal stimuli. Journal of Bionic Engineering, 2016, 13, 612–621.
Okatani T, Takahashi H, Noda K, Takahata T. A tactile sensor using piezoresistive beams for detection of the coefficient of static friction. Sensors, 2016, 16, 718.
Prasad S K, Kitagawa M, Fischer G S, Zand J, Talamini M A, Taylor R H, Okamura A M. A modular 2-DOF force-sensing instrument for laparoscopic surgery. International Conference on Medical Imaging Computing and Computer-Assisted Intervention, Montreal, Canada, 2003, 279–286.
Wang X, Sun Y, Wang Y, Hu T, Chen M, He B. Artificial tactile sense technique for predicting beef tenderness based on FS pressure sensor. Journal of Bionic Engineering, 2009, 6, 196–201.
Someya T, Kato Y, Sekitani T, Iba S, Noguchi Y, Murase Y, Kawaguchi H, Sakurai T. Conformable, flexible, large-area networks of pressure and thermal sensors with organic transistor active matrixes. Proceedings of the National Academy of Sciences of the United States of America, 2005, 102, 1–5.
Lim S, Lee H, Park J. Grip force measurement of forceps with fibre Bragg grating sensors. Electronics Letters, 2014, 50, 733–735.
Ahmadi R, Packirisamy M, Dargahi J, Cecere R. Discretely loaded beam-type optical fiber tactile sensor for tissue manipulation and palpation in minimally invasive robotic surgery. IEEE Sensors Journal, 2012, 12, 22–32.
Iii F L H, Kramer R K, Wan Q, Howe R D, Wood R J. Soft tactile sensor arrays for force feedback in micromanipulation. IEEE Sensors Journal, 2014, 14, 1443–1452.
Liu Y, Han H, Liu T, Yi J, Li Q, Inoue Y. A novel tactile sensor with electromagnetic induction and its application on stick-slip interaction detection. Sensors, 2016, 16, 430.
Ahmed M, Chitteboyina M M, Butler D P, Çelik-butler Z. MEMS force sensor in a flexible substrate using nichrome piezoresistors. IEEE Sensors Journal, 2013, 13, 4081–4089.
Francomano M T, Accoto D, Guglielmelli E. Experimental characterization of a flexible thermal slip sensor. Sensors, 2012, 12, 15267–15280.
Fernandez R, Payo I, Vazquez A S, Becedas J. Microvibration-based slip detection in tactile force sensors. Sensors, 2014, 14, 709–730.
Zhang X, Liu R. Slip detection by array-type pressure sensor for a grasp task. In Proceedings of 2012 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 2012, 2198–2202.
Scheibert J, Leurent S, Prevost A, Debrégeas G. The role of fingerprints in the coding of tactile information probed with a biomimetic sensor. Science, 2009, 323, 1503–1506.
Chen H, Zhang L, Zhang D, Zhang P, Han Z. Bioinspired surface for surgical graspers based on the strong wet friction of tree frog toe pads. ACS Applied Materials & Interfaces, 2015, 7, 13987–13995.
Jiang Y G, Shiono S, Hamada H, Fujita T, Zhang D Y, Maenaka K. Reactive ion etching of poly(vinylidene fluoride-trifluoroethylene) copolymer for flexible piezoelectric devices. Chinese Science Bulletin, 2013, 58, 2091–2094.
Jiang Y G, Gong L L, Hu X H, Zhao Y, Chen H W, Feng L, Zhang D Y. Aligned P(VDF-TrFE) nanofibers for enhanced piezoelectric directional strain sensing. Polymers, 2018, 10, 364.
Persano L, Dagdeviren C, Su Y, Zhang Y, Girardo S, Pisignano D, Huang Y, Rogers J A. High performance piezoelectric devices based on aligned arrays of nanofibers of poly(vinylidenefluoride-co-trifluoroethylene). Nature Communications, 2013, 4, 1633.
Sirohi J, Chopra I. Fundamental understanding of piezoelectric strain sensors. Journal of Intelligent Material Systems and Structures, 2000, 11, 246–257.
Pan C T, Yen C K, Wang S Y, Lai Y C, Lin L, Huang J C, Kuo S W. Near-field electrospinning enhances the energy harvesting of hollow PVDF piezoelectric fibers. RSC Advances, 2015, 5, 85073–85081.
Acknowledgement
This work was supported by the National Nature Science Foundation of China (No. 51575027), the Beijing Municipal Natural Science Foundation (No. 3152017), and the Beijing Nova Program (No. Z141104001814035).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Jiang, Y., Ma, Z., Cao, B. et al. Development of a Tactile and Slip Sensor with a Biomimetic Structure-enhanced Sensing Mechanism. J Bionic Eng 16, 47–55 (2019). https://doi.org/10.1007/s42235-019-0005-8
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42235-019-0005-8