
Abstract
The escalating in load demand prioritized the incorporation of additional renewable energy generation plants to the existing grid. In parallel, the necessity of reactive power balance and damping characteristics has advised the incorporation of flexible AC transmission system controllers to the existing power network. Hereby, the modern power system has been driven towards the much more composite system which in turn necessitates a healthy controller technique. The objective of this paper is to contribute recommendations to incorporate robust controller technique in the field of the electrical power system. Detailed design considerations for the \(H\infty\) controller design of a modern power network have been specified, and the same has been demonstrated with mathematical modelling of power network with static synchronous compensator (STATCOM) connected in the middle of the transmission line and in a multi-machine power system. To comment on the suitability of the controller design, a deep stability analysis has been presented and compared with the traditional power system stabilizer, power system stabilizer optimized using particle swarm optimization with time-varying acceleration coefficients algorithm and whale optimization algorithm under adverse system operating conditions. The proposed controller framework has been presented by considering the case studies of single machine infinite bus system, two-machine system model and the benchmark two-area four-generator multi-machine systems connected with STATCOM. The controller performance analysis has been verified by considering eigenvalues analysis, singular value analysis and dynamic response of system states during perturbations for the first two case studies, and system analysis under faulty condition has been investigated for the multi-machine system.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The emergent power system of the nation is that integrates all remote areas and supplies uninterrupted power to the load points of the nation. To achieve the goal of a nation, it is mandatory to build a reliable power network having handy power generation. In the present scenario of load demand, this can only be achieved by utilizing all the resources in the field of power generation. Non-conventional energy sources such as solar and wind power generation methods playing a vital role in it. Such sources are the best suitable for the remote areas, and it is the growing technology even in urban areas (Adefarati and Bansal 2016; Wolter 2017; Alhelou et al. 2018). The awareness in utilizing natural resources in power generation has been increasing day by day, and it has led to the growth in installation of local power generation plants all over the world. In this perspective, the integration of local generating plants and new large generating units to the existing grid has been a challenging task to maintain a smooth operation of the power system. Perhaps the expansion of the transmission system of an existing network is not being viable in most of the cases (Zhang and Conejo 2018; Ziaee et al. 2018). A deep forecast needs to be focused in dealing with the upcoming fast-growing power network, which will suggest new optimal solutions without disturbing the existing network much. As a part of the forecast, all the controller techniques now in service are to be investigated for the future challenging environments under severe circumstances.
Power system stabilizers (PSS) are the traditionally employed controllers in damping out the power system oscillations. These traditional controllers are operated based on the locally measured inputs and never been a permanent solution for the fast-growing power network because of its own operational limitations (Aboul-Ela et al. 1996). In this regard, the design of complementary controllers to PSS has been suggested (Shahalami and Farsi 2018; Asghari et al. 2018) by providing controller action through excitation system by means of wide area monitoring systems (WAMS). The improved transient stability behaviour has been observed by the shunt-connected static synchronous compensator (STATCOM) in the power network (Chatterjee and Ghosh 2011; Halder and Mondal 2015), and it has suggested for the stable operation. The escalation of non-conventional sources demand suggests fast acting damping devices for protection against stability threats in the power network (Tang et al. 2015). In controlling the excitation system by means of system dynamic parameters, installation of damping devices further to be well coordinated with the existing PSS (Tavakoli et al. 2014). An uncoordinated design of the supplementary controllers will deteriorate the whole system behaviour (Morshed and Fekih 2019; Patra et al. 2018), in this viewing platform STATCOM has been suggested as damping controller with Honey Bee Matching Algorithm for tuning its parameter for the appropriate coordination (Safari et al. 2013). Further, the application of various optimization algorithms in the field of power system stability getting increased where a cuckoo search optimization is applied for an optimal and robust PSS designing for multi-machine power systems (Chitara et al. 2018), whale optimization algorithm for designing PSS in a multi-machine system (Dasu et al. 2019), modified whale optimization algorithm for FACTS-based controller design (Sahu et al. 2018; Sahu et al. 2019) and other optimization methods in the field of stabilization and coordination among the controllers (Peres et al. 2018; Miotto et al. 2018; Hannan et al. 2018).
If the complete power network considering auxiliary stabilizing devices can exhibit stable operation and insensitive to the system parameter variations over the scenario of unpredictable perturbations, it can be treated as a robust network. Fast-growing robust control techniques are trending in the present complex power network scenario to match the system conditions for the unpredictable fluctuations in the improvement in transmission and distribution quality of power (Sharma et al. 2016; Zhang et al. 2017; Sadegh 2013). The incorporation of intelligent techniques while designing the robust controllers will make the power network to handle all dynamic challenges in daily system operating conditions (Buijs et al. 2011). This paper presents the detailed guidelines in designing a robust controller in the field of the power system to improve stability by considering power system models of single machine, two-machine and multi-machine systems.
The rest of the paper has been prearranged as follows: The detailed power system model with the STATCOM has been presented in Sect. 2. In Sect. 3, the conventional power system stabilizer and optimized power system stabilizers have been explained with the considered objective function and inequality constraints. The objective of robust controller design for the power network has been described, and detailed guidelines are given to implement for the forthcoming complex power network in Sect. 4. Analysis on the stability of the responses obtained for the considered system has been investigated in Sect. 5. The concluding contention is contributed in Sect. 6, and system parameters and constants are listed in “Appendix” followed by the list of referred citations at the end.
2 Power System Modelling with STATCOM
Mathematical modelling of system components has been a better alternative for the proper forecast of the system dynamic behaviour under different conditions from which assessment of suitable controller characteristics can be drawn. For the better incorporation of controller techniques into the complex power network, proper mathematical modelling has been suggested which should match every day’s fast-growing power network. For the purpose of study and analysis, the framework of the suggested controller design has been partitioned into three modules in this paper, namely
- Module 1
Mathematical modelling of power network with FACTS devices matching to the practical scenario (STATCOM is considered in this paper).
- Module 2
Robust controller design for the developed power network model by meticulous selection of weighting functions.
- Module 3
Tuning of the weighting functions to meet the minimum H∞ norm and efficient performance characteristics under system perturbations.
The above specified modules, steer the considered power network towards the stable operating mode under peculiar system operating conditions. For the evaluation of controller performance, case studies of single-machine infinite bus (SMIB) system connected with STATCOM and two-area power system with STATCOM in the middle of the transmission line have been considered. The detailed mathematical modelling of considered systems is explained as Module 1 as follows:
2.1 STATCOM Connected to SMIB
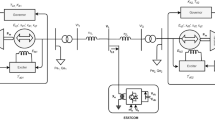
The model of single machine infinite bus system incorporated with STATCOM has been shown in Fig. 1. Mechanical input has supplied to the alternator through the voltage regulator having constants of KA, TA where M, Xd, \(X_{{d}}^{\prime}\) are alternator constants. Lastly, maintaining infinite bus voltage of Vb through transformer and transmission lines having a reactance of XtL and XLB, respectively. A voltage source converter (VSC)-based STATCOM, having controllable DC voltage Vdc with the aid of pulse width modulation (PWM) technique, has been placed through a shunt transformer with a reactance of Xe to the utility bus.

SMIB system with VSC-based STATCOM
In the fundamental single machine infinite bus system, the expressions for the power output, terminal voltage, internal voltages behind transient and synchronous reactance of the generator are given in Eqs. (1–3).
The statcom current at the utility bus is controlled by means of capacitor voltage on the dc side of the VSC of Statcom. The direction of statcom current at the utility bus indicates the reactive power flow from the statcom which plays a vital role in damping power system oscillations in the system. The dynamic relation between the capacitor voltage and current in the STATCOM circuit is expressed as,
where \(I_{L0d}\) and \(I_{L0q}\) are the direct and quadrature axes components of STATCOM current, \(I_{L0}\). The statcom output voltage phasor is expressed in terms of modulation index and phase angle of pulse width modulation (PWM)-controlled voltage source converter (VSC) given as,
The dynamic system response of the considered SMIB connected with STATCOM can be explained from Eq. (8) to (11),
The coefficients in (8–11) can be derived from the dynamics of power system components as explained in (Krishna 2014; Wang1999a, b, 2003). Further, resolving Eqs. (8–11) gives the corresponding state equation structure for the system shown in Fig. 1 with the state variables \(\Delta \mathop \delta \limits^{{}} ,\Delta \mathop \omega \limits^{{}} ,\Delta \mathop {E^{\prime}_{\rm q} }\limits^{{}} ,\Delta E_{fd} ,\Delta \mathop V\nolimits^{{}}_{\rm dc}\) and control variables \(\Delta m_{e} ,\Delta d_{e}\).
2.2 Two-Area System Connected with STATCOM
A two-area power system connected with STATCOM in the middle of the transmission line is shown in Fig. 2. In the considered two-area system, each area consists of a synchronous generator supplying power to the load of local and inter-area. The dynamics of system states can be analysed by the generalized model derived as follows:

Two-area system with VSC-based STATCOM
The line current and voltage at the bus of any area in a multi-area system can be given as Eq. (12). Where the components represent the cumulative response of all machines in the respective area.
where \(d_{i} = \angle (E_{qi}^{\prime} , \, V_{ti} )\). For n-area system, i = 1, 2, 3, 4,……, n
For a two-area system with single machine in each area, i = 2 and the magnitude of Eq. (12) corresponds to the power delivered to the inter-area after fulfilling the local area load demand.
For a two-area system with STATCOM placed in the middle of the transmission line as shown in Fig. 2, the d–q components of current in Eq. (12) for the first area are expressed as,
The initial torque angle at the utility bus of first area can be determined by
where \(V_{\rm dc}\) is the STATCOM voltage and \(m_{e}\) is the modulation index.
Similarly, for the second area, the current and initial torque angle at the utility bus can be expressed as,
The initial torque angle at the utility bus of the second area can be determined by
For the dynamic power network, STATCOM balances the power in the transmission line through the injection of adequate current based on the PWM signal through the control of modulation index and phase. The direction of current depends on the magnitude of STATCOM bus voltage and utility bus voltage where the d-q components of the STATCOM current are determined by Eqs. (13), (14), (16) and (17) and is given as,
Further, extending the above-mentioned relations and deducing the system constants from the system dynamics as explained in SMIB case, complete system model and the consolidated system will have the system state matrix of \([\Delta \dot{\delta }_{1} \;\Delta \dot{\omega }_{1} \;\Delta \dot{E}^{\prime}_{q1} \;\Delta \dot{E}_{fd1} \;\Delta \dot{V}_{\text{dc}} \;\Delta \dot{\delta }_{2} \;\Delta \dot{\omega }_{2} \;\Delta \dot{E}^{\prime}_{q2} \;\Delta \dot{E}_{fd2} ]^{\text{T}}\) and the control variables of \([\Delta m_{e} \;\Delta d_{e} ]^{\text{T}}\).
3 Power System Stabilization Techniques
The function of PSS is to mitigate the local and inter-area oscillations of a power network. It can be achieved by providing a control signal in the system by monitoring the power fluctuations or rotor speed fluctuation or both the quantities together. It can be further classified based on the design of the controller as follows:
3.1 Conventional Power System Stabilizer (CPSS)
The theory of conventional PSS operation has to provide necessary positive/negative damping torque to the alternator through the excitation system of the power network. The phase difference between the electrical torque and change in angular velocity is the determining factor to justify the requirement. The generalized block diagram of the power system stabilizer is shown in Fig. 3. The phase compensation unit in PSS has been designed to monitor the system uncertainties and generates the necessary phase shift. The function of the reset block in Fig. 3 is to terminate the compensation effect in steady state and should not affect the compensation block which can be achieved by choosing a large value of Tw. The detailed design aspects and theory behind the conventional PSS has been given in (Kundur 1994; Padiyar 1999).

Block diagram of power system stabilizer
4 Optimized Power System Stabilizer
The optimal values of gain and time constants of PSS can be achieved by using metaheuristic algorithms based on the objective function formed for the power network. In this paper, PSS based on particle swarm optimization with time-varying acceleration coefficients (PSO-PSS) (Patwal et al. 2018; Ghosh and Kalwar 2018) and whale optimization algorithm-based PSS (WOA-PSS) (Mirjalili and Lewis 2016) have been considered for the parameter tuning of PSS with the inequality constraints as given in Eq. 21 by meeting the criterion as mentioned in Eq. 22. The optimization algorithm constants have been listed in “Appendix” A, and parameter limits are given in Table 1. For the designed power system simultaneous tuning of the controller parameters subjected to the boundary limits as follows:
where \(T_{11} ,T_{21} ,K_{c11}\) are the time constants and gain of phase compensation block of PSS, respectively, for generator 1 and \(T_{12} ,T_{22} ,K_{c12}\) are the time constants and gain of phase compensation block of PSS respectively for generator 2. The control parameter limits have been given as follows:
The stabilizer parameters have been tuned using the considered optimization algorithms by maximizing the damping ratio of critical oscillatory modes. Hence, the objective function for the optimizations algorithms can be defined as,
In this paper, the critical damping ratio has been considered as \(\xi\) < 1%. In Eq. 22, p is the number of selected operating points and n is the number of eigenvalues. By maximizing the damping ratio of the critical oscillating mode damping ratios, the improvement in system stability can be achieved for normal and perturbation conditions. The convergence characteristics of the proposed optimized power system stabilizers for the considered case studies have been shown in Fig. 4. And the achieved objective function magnitudes with the corresponding optimization algorithms are listed in Table 2. Further, the power system stabilization technique can be extended to robust controller designs as explained in the next section.

Convergence characteristics of optimization algorithms for a SMIB system, b two-area system
5 Robust Controller Design
The efficient controller design in the power network, intended to obtain the satisfactory power balance between the generation and the load dynamically. In the fast-growing power network, a slight delay in the individual exciting controlling units may cause major damage in the system operation. The best approach to nullify such scenarios can be achieved by the wide monitoring of distinct units in the power network through a central controlling unit.
The Hardy space robust controller has been proven as the most powerful method in dealing with the vulnerable system operating conditions for a bulky as well as multivariable systems, and it has most effective and efficient robust design method for linear time-invariant (LTI) control system. \(H\infty\) control synthesis is having an advantage of achieving stabilization with guaranteed performance with the suitable design of weighting functions. The \(H_{2} /H\infty\) optimal control in this paper has to obtain the requisite damping in the system states under the assumed uncertainties of the designed power network parameters. The basic perception of \(H\infty\) controllers can be abridged by Fig. 5, where the designed framework consists of generalized plant transfer function G(s) and linear controller transfer function, K(s). The complete controller utilizes frequency-dependent weighing functions W1, W2 and W3 to tune the controller’s performance and robustness features. The response from \(H\infty\) controller has been achieved concerning regulated performance output variables y1 of errors to be reduced and measured output variables y2 for a given control inputs u1, u2. The \(H\infty\) synthesis problem is to find, among all controllers that yield a stable closed-loop system, a controller K that minimizes the infinity norm given in Eq. 23.

Block diagram of hardy space synthesis
The stabilizable and detectable plant G has been provided with the independently stable weighing functions W1, W2 and W3 where the weights stands for sensitivity weighting function, damping weighting function, and robustness or accuracy weighting function, respectively. As shown in Fig. 5, the Hardy space synthesis initially designs weighted mixed-sensitivity control system by importing two-input-two-output system on the basis of the size of the selected weighing function. For the partitioned mixed-sensitivity control system through the gamma iteration, \(H_{2} /H\infty\) synthesis computes the controller K with the minimal cost GAM. Where the complete closed-loop system (CL) of plant (P) and controller (K) shown in Fig. 5 satisfies the condition (23). The detailed design steps are explained further as module 2 in this paper.
Module 2 in the comprehensive algorithm comprises of two significant levels, one is the selection of weighting functions for the robust controller and other is the design of the controller for the modelled system. The selection of weighting functions is an iterative process which has to be determined by the continuous monitoring of controller design steps and stability analysis in the variable system operating conditions, and the detailed process has been further explained in this section. The suggested design considerations of the controller, to be robust for the changes in system operating conditions of a power network, has been discussed in this section as follows:
The robust controller that suggested for power network in this paper has been elaborated in the flowchart as shown in Fig. 6. The external disturbances and stability considerations have been nullified by the proper selection of weighting functions. The Hardy space synthesis computes controller called \(H\infty\) controller (K) for the designed power network model with the considered weighting functions. It considers the augmented power network model with weighting functions through gamma iteration to achieve the minimum cost of \(H\infty \;{\text{Norm}}\) magnitude (Başar and Bernhard 2008; Li et al. 1992) as given in Eqs. (30, 31).

Flowchart of \(H\infty\) controller design (module 2)
The detailed control synthesis has been shown in Fig. 6, where the system model developed in module 1 in the previous section will be considered for the controller design with suitable weighting functions. The procedure for the appropriate selection of weighting functions will be elaborated in the next sub-section and by assuming the arbitrary weighting functions W1, W2 and W3, and the controller design will be formed to act robust for the power network as described below:
For a system ‘SYS’ with controller ‘K’, the mixed-sensitivity problem can be represented as a cost function corresponds to the robust stabilization with regular to additive perturbation as (Gu et al. 2006),
The external functions or weighting functions have been considered by the Hardy space synthesis to incorporate robustness for the power network which allows a high degree of freedom in system operating conditions. For the respective weights selected, the complete system augmentation will be done for the designed power network. For the power network model, SYS, and the weighting functions W1, W2 and W3, the cost function can be represented in a standard configuration using linear fractional transformation (LFT) technique as,
The augmented system, P represents the gross power network with the considered weighting functions to ensure stable mode of system operation by defining the constraints in the design of proposed control synthesis (Gu et al. 2006; Souza and Souza 2019; Xie 2016). Equation (25) can be partitioned as,
So the lower linear fractional transformation of the system, SYS and controller, K of the block diagram shown in Fig. 5 is given as,
From Eqs. (24, 28), the mixed-sensitivity function can be represented as the design objective given as,
Equation (29) referred as \(H\infty\) optimization problem. Which represents the minimization of performance variable output, y1 over the design of the controller, K. The design of the proposed Hardy space controllers \(H_{2}\) and \(H\infty\) differs in the aspect of filter design. The condition in (23) has been tested by considering the norms for \(H_{2}\) and \(H\infty\) as average and maximum values of the magnitudes, respectively, in the frequency response of the system states. As given in (23), the controller performances based on either minimizing deviation in the system states over all the frequencies or by minimizing the deviation at the cut of frequency based on the controller that has been given. The controller with \(H\infty\) optimization will be having robustness against uncertainties in the frequency components of the input signal but involves some error level for all frequencies. The \(H_{2} \;{\text{Norm}}\) and \(H\infty \;{\text{Norm}}\) of the system can be represented in the frequency domain for the system, SYS given in Eqs. (30) and (31), respectively.
The minimization of the above function over all the frequencies will give the optimum system operating condition. The Min–Max design of \(H\infty\) synthesis is to design the minimized performance index for the system abnormalities and disturbances in system states which implies to achieve maximized overall system performance. This minimization process in the \(H\infty\) synthesis referred to as \(H\infty\) optimization problem, and the degree of robustness of the modelled system depends on the choice of constraints framed in the minimization process. A mathematical iteration technique, bisection method has been adopted for finding optimal value of gamma in the defined system limits and the controller matrix, K and closed-loop system, CL of the modelled power network can obtain by the derived gamma value as shown in Fig. 6.
Hence from the derived system functions of the plant (power network), SYS and the \(H\infty\) controller, K with a set of selected weighting functions, the stability analysis under different system operating conditions can be performed. The detailed steps in the stability analysis and the guidelines in choosing weighting functions of the proposed \(H\infty\) controller design have been explained in the next sub-section.
5.1 Selection of Weighting Functions
Apart from the design of the robust controller, the selection of weighting functions is the crucial step in power system oscillation damping. In this paper, a suitable framework has been made for the fast converging solution. The basic guidelines in choosing weighting functions have been derived by considering various researches on \(H\infty\) control technique. The proposed robust controller in this paper consists of three weighting functions which represent sensitivity, damping and accuracy of W1, W2 and W3, respectively. The sensitivity weighting function will make the plant model to be independent of external disturbances. The effect of noise at high frequencies can be damped by balancing the gain of the closed-loop transfer function at high frequencies.
Instability in the system parameters will be looking after by the frequency-dependent accuracy function. In detail, (Pal and Chaudhuri 2006) the weighting function W1 is a frequency-dependent and controls the magnitude of sensitivity which counteracts the external disturbances over the power network as given in Eq. (32). The weighting function W3 is a frequency-dependent robustness function used to limit the magnitude of complementary sensitivity function over the frequencies as given in Eq. (34). W2 is a gain matrix to give sufficient damping nature for the overall power network through the proposed \(H\infty\) synthesis. From various researches (Bevrani et al. 2015; Geng et al. 2018; Lundström et al. 1991), the suggested weighting functions can be represented as follows:
where ‘A’ is the fraction of maximum high-frequency noise signals. ‘µ’ maximum acceptable deviation in steady-state value and ‘ωc’ minimum accepted bandwidth for the power network closed loop. Damping weighting function W2 is the appropriate gain according to the requisite system’s damping nature.
For the given power network model SYS and \(H\infty\) controller K, the sensitivity ‘S’ is given by \(\left( {I + PK} \right)^{ - 1}\) whereas complementary sensitivity ‘T’ is given by \((I - S)\) ‘I–S’. The singular values of the frequency response extend the Bode magnitude response for multi-input multi-output (MIMO) systems and are useful in robustness analysis. The singular value plot of the frequency response of the \(H\infty\) dynamic closed-loop system has been given in Fig. 7.

Singular value analysis on a sensitivity and complementary sensitivity, b closed-loop system w.r.t. weighting functions and \(H\infty \;{\text{Norm}}\) under steady state
The plant or power network should be insensitive to the external disturbances under steady-state or unperturbed system states, which implies that the singular values of the sensitive function should have the less value over all frequencies, as shown in Fig. 7a for the designed controller. The singular plot of the complementary sensitivity function has been shown in Fig. 7a, which gives the detailed description of robustness nature for the power network states by posing low magnitude of singular values for the high-frequency noise or disturbance signals. Figure 7b signifies the closed-loop power network transfer function singular values with \(H\infty\) synthesis relative to the weighting functions, where the \(H\infty \;{\text{Norm}}\) or Gamma value for the designed controller is the maximum overall frequencies of its largest singular value and may be interpreted as its maximum energy gain.
5.2 Stability Assessment of Power Network
For the designed power network and selected weighting functions, an initial cost function P and controller K has been designed by following the guidelines discussed in Eq. (27). The tentative designed parameters will be undergone for the objective verification for stability criterion of the power network. The scattering or static nature of the designed functions P and K will be tested, and closed-loop system of the plant will be developed in \(H\infty\) synthesis. Hence, the designed tentative \(H\infty\) parameters will be confirmed once it satisfies the eigenvalue criterion and dynamic system performance characteristics in perturbed system operating conditions. A three-step screening process has been considered for the iteration process of weighting function selection as shown in the bottommost section of the flowchart shown in Fig. 8.

Flowchart for stability inspection of power network with \(H\infty\) controller (module 3)
6 System Study and Analysis
Keeping all the design considerations mentioned in the previous sections, the system analysis has been made on the modelled test systems. The eigenvalue analysis and the system performance characteristics under perturbations in operating conditions have been carried out to comment on the controller performance. The detailed system analysis has been described as follows:
Case i: STATCOM Connected in SMIB System
For the modelled single machine infinite bus system with STATCOM, the robust controller has been designed from the guidelines given in the previous section and the system behaviour has been compared with the conventional PSS, PSO-PSS and WOA-PSS. The eigenvalues and its corresponding damping ratios for the designed system with the proposed controllers have been tabulated in Table 3. The eigenvalues of the designed system represent the closed-loop poles of the system, where higher damping ratio corresponds to the more stability of the system in different system operating conditions. From Table 3, it has been observed that the eigenvalues are lying in the LH side of the imaginary axis and represent the stable system operation with the proposed control techniques. Higher the negative real part of the eigenvalues corresponds to the higher positive damping of the system, and the positive damping ratio represents the stable mode of operation of the system. The eigenvalues obtained from the proposed techniques in Table 3 of SMIB with STATCOM corresponding to the stable operating mode, where the number of eigenvalues depends on the number of system states and the order of weighting function applied as explained in the previous section. The system behaviour has been further explained during abnormalities in Fig. 9 by considering 10% perturbation in the system states with the proposed controllers.

System dynamic performance under 10% disturbances in system states with controller action in a angular speed, b torque angle delta, c alternator internal voltage, and d field excitation voltage
The performance analysis on the proposed stabilizers for a SMIB system has been demonstrated during the system abnormal operating environment in Fig. 9. The effect of time delay in a wide area monitoring system can be considered by assuming the delay causes a maximum perturbation in system states as 10% (Asghari et al. 2018). Figure 9 shows the damping nature offered to the system states by the proposed stabilizing methods by assuming a perturbation of 10% in its state at t = 0 S. The robust nature of the proposed technique has been observed by comparing the damping behaviour of system states with the conventional stabilizer and optimized stabilizers. Figure 9a represents the damping characteristics of the angular velocity of the synchronous generator when 10% perturbations due to various reasons like sudden change in load. The controller action came into the picture through the controllers, where the conventional PSS and optimized PSS resulted in higher magnitude of speed variation, whereas the proposed \(H_{2} /H\infty\) synthesis limited the speed variation to the lower values. Similarly, the performance characteristics of torque angle deviation, alternator internal voltage deviation and field voltage deviation have been shown in Fig. 9b–d, respectively, for the 10% perturbation in its state at t = 0 s. However, the proposed \(H_{2} /H\infty\) controllers have more settling time in damping the oscillation and the magnitude of the deviation in the systems are within the tolerable limits where \(H\infty\) synthesis results in better characteristics over \(H_{2}\) synthesis for the considered system.
Case ii: STATCOM Connected in Two-Machine System
The comparative eigenvalue analysis among the suggested controllers has been presented for a two-area system in Table 4. As mentioned in SMIB connected with STATCOM, the number of eigenvalues for the proposed stabilizing techniques depends on the controller structure as explained in the prior sections and the order of weighting functions considered if any. All the eigenvalues listed in Table 4 with the designed stabilizing techniques representing negative real part and with positive damping nature, which represents a stable system operating conditions for the designed model with the proposed systematic design considerations.
From mentioned case studies for the eigenvalues in Table 4, it has been found that the proposed design considerations for the \(H_{2} /H\infty\) synthesis in damping power network oscillations gave satisfactory operation under normal operating conditions and proved that the wide monitoring of multiple machines can be achieved on a centralized control basis. The eigenvalue analysis is not quite sufficient to comment on the complete controller performance and system studies under perturbations are essential to check for the robustness.
In the rapidly growing power network scenario, the controller assessment can be performed based on its adaptability to uncertainties in system operating conditions. So, it is essential to check the system behaviour under perturbations in the system operating conditions. In the practical power network, the collective system has been well equipped with the protection units and the controller design should adopt the system operating conditions. Based on the forecast made on the practical power network, a 10% fluctuation in the system states has been tested on the modelled system and presented in Fig. 10.


Two-area system dynamic performance under 10% disturbances in system states with controller action of a angular speed of alternator 1, b angular speed of alternator 2, c torque angle at area 1, d torque angle at area 2, e field excitation voltage of alternator 1, f field excitation voltage of alternator 2, g alternator 1 internal voltage, and h alternator 2 internal voltage
The system performance shown in Fig. 10 demonstrates the satisfactory operation of the proposed control algorithm in comparison with traditional power system stabilizer and optimized PSS techniques. The damping nature of the system states has been much improved, and peak overshoot of the system states decreased with the proposed complementary control technique for the considered power network. Figure 10a, c, e, g represents the damping nature of system states of alternator in the first area, whereas Fig. 10b, d, f, h represents the damping nature of system states of alternator in the second area. Unlike the damping nature observed in SMIB with STATCOM, in two-area system, the damping behaviour of system states changed for the different techniques that have been explained in this paper. As there are both inter-area and intra-area oscillations during the perturbation, the control techniques experience huge stress in damping the oscillations of system states.
Figure 10a, b shows the damping behaviour of the angular speed of alternator 1 and 2 of area 1 and 2, respectively. The conventional PSS provides a control signal to the field excitation circuit based on the speed variations to meet the load demand. The optimized PSS works on the same principle by picking optimal values of controller parameters based on the proposed algorithms. The damping nature provided by CPSS, PSO-PSS and WOA-PSS can be observed from the response, in which the proposed H inf and H2 synthesis are resulting in better damping characteristics for the considered system perturbation. Figure 10c, d represents the torque angle of an alternator in area 1 and 2, respectively, of which an improper controller design for the oscillation damping will result in a blackout in the whole system. The damping characteristics shown by the suggested techniques results in satisfactory operation. Figure 10e, g, f, h represents field voltage and alternator internal voltage of area 1 and 2, respectively. As mentioned above, the conventional PSS and optimized PSS stabilizes the power network by altering the generated voltage at the alternator terminal through filed excitation control. The damping performance in these signals shows the satisfactory operation where optimized PSS are resulting in higher peak values after the perturbation which damp out the voltage variations in few cycles. The resulting magnitude of higher peak voltages may cause high stress on the system components which is not permissible to some extent. The proposed \(H_{2}\) and \(H\infty\) controllers showing robust performance in damping these oscillations over the traditional methods with lesser peak values.
From the different analysis that has been discussed in this paper, conferred that the proposed guidelines in the design of the robust controller will be a suitable complement for the standing traditional controllers and wide monitoring of complex power network can be achieved by minding the suggested guidelines. The suggested controller will be much more efficient by incorporating novel tuning controllers in terms of advance intelligent techniques for the determination of weighting functions. Still, it can be managed by experienced control operators at the design centres in achieving fast convergence in the system states by the guidelines explained in this paper. The detailed tuning parameters and optimized values of the proposed methods have been listed in Table 4. ‘Obj Fun’ in Table 4 stands for the magnitude of the considered objective function and the negative sign represents the maximization of the considered objective function.
Case iii: STATCOM Connected in Multi-machine Power System
From the inferences derived from the previous case studies, the robust controller techniques have been showing better damping characteristics over the conventional and optimized power system stabilizers. Hence the proposed framework is well recommended in the field of power system and its damping characteristics can be further demonstrated for the multi-machine system. In this case study, a benchmark two-area four-generator system has been considered (Kundur 1994; Canizares et al. 2017) with STATCOM connected in the middle of the transmission line at bus 11 as shown in Fig. 11, which is consisting of two areas in which generators G1 and G2 are connected in area 1 and G3 and G4 are connected in area 2. In each area, a shunt capacitance and load has been connected at bus 7 and 8 of area 1 and 2, respectively. The detailed system specifications have been mentioned in “Appendix”.

Two-area four-generator system with STATCOM
In this case study, the damping nature of the system states with the proposed controller has been demonstrated by considering a self-clearing three-phase fault at bus number 7 at t = 1 s for a duration of 0.1 s. The inter-area and intra-area oscillations occurred in the system have been damped with the proposed controllers and compared with conventional PSS as shown in Figs. 12, 13 and 14.

Torque angle (in p. u.) w. r. t. generator 1 of a generator 2, b generator 3, c generator 4 for a two-area four-generator system with a self-clearing fault from t = 1 s to 1.1 s at bus 7

Angular speed (in p. u.) of a generator 1, b generator 2, c generator 3, d generator 4 of a two-area four-generator system with a self-clearing fault from t = 1 to 1.1 s at bus 7

Active power (in p. u.) of a generator 1, b generator 2, c generator 3, d generator 4 of a two-area four-generator system with a self-clearing fault from t = 1 to 1.1 s at bus 7
The self-clearing fault at bus 7 introduces oscillations in the whole system, and the essential damping action in the post fault condition is necessary in maintaining healthy operating conditions. Figure 12 depicts the torque angle characteristics of generators G2, G3 and G4 with reference to the G1 under the three-phase fault condition at t = 1 s which is cleared in 0.1 s with appropriate relaying system. The proposed robust controller results in better damping characteristics with less settling time and peak magnitude over the conventional PSS after the fault has been cleared.
Figures 13 and 14 show the angular speed and active power characteristics, respectively, of generators G1, G2, G3 and G4 in the presence of proposed damping controllers under fault condition. The pattern of inter-area and intra-area oscillations can be observed from the set of generators of area 1 (namely G1 and G2) and area 2 (namely G3 and G4). The fault considered at bus 7 introduces oscillations in the adjacent area 2 and the damping action with the proposed controllers shown better performance characteristics over the conventional method. The framework given in Sect. 4 resulted in better damping characteristics with less peak magnitude and minimum settling time after the fault cleared where \(H\infty\) synthesis results in better characteristics over \(H_{2}\) synthesis for the considered system which can be observed from Figs. 12, 13 and 14.
7 Conclusion
The concept of generation-load balance has been the prerequisite for the reliable power system operation which in turn comprises added complexities in maintaining stable system operating conditions under the peak load or impulsive fluctuations/instabilities. To deal with the critical operating conditions, this paper suggested a \(H\infty\) synthesis for the wide monitoring of multi-machine power system. The detailed guidelines have been provided for the designing of the whole controller scheme of the advanced power system which has been embedded with a shunt-connected FACTS device, STATCOM. The effectiveness of the proposed controller has been demonstrated by comparing the system eigenvalues and system performance during the perturbation in system states with the conventional PSS and optimized PSS with PSO-TVAC and WOA algorithms. The damping nature offered in the system states for a multi-machine power system has been examined with the proposed controllers and compared with the conventional PSS under momentary fault condition. From the analysis made on the considered case studies, it has been concluded that the proposed controller contributes an active role in maintaining the system in stable mode under abrupt changes in system states. It has also been inferred that the wide monitoring of multi-machine system with \(H\infty\) synthesis offers the robustness for the complex FACTS-embedded modern upcoming power network as well.
Abbreviations
- FACTS:
-
Flexible AC transmission system
- \(H_{2} /H\infty\) :
-
Hardy space techniques
- STATCOM:
-
Static synchronous compensator
- PSS:
-
Power system stabilizer
- SMIB:
-
Single machine infinite bus system
- VSC:
-
Voltage source converter
- LHS S-Plane:
-
Left-hand side of S-plane
- \(E_{{{\text{q}}1}}^{{\prime }} ,E_{{{\text{q}}2}}^{{\prime }}\) :
-
Internal voltage of the generator 1, 2
- E fd1 , E fd1 :
-
Field voltage of the generator 1, 2
- \(x_{{{\text{d}}1}}^{{\prime }} , \, x_{{{\text{d}}2}}^{{\prime }}\) :
-
Direct axis transient reactance of the generator 1, 2
- x d1 , x d2 :
-
Direct axis steady-state reactance of generator 1, 2
- xq1, xq2 :
-
Quadrature axis steady-state reactance of generator 1, 2
- m e :
-
Amplitude modulation ratio of STATCOM
- δ e :
-
Phase angle of STATCOM
- ω :
-
Fundamental frequency
- c dc :
-
DC link capacitor
- v dc :
-
Voltage across the DC link capacitor
- i dc :
-
Current through the DC link capacitor
- δ :
-
Torque angle/power angle
- V t :
-
Terminal voltage of the generator
- x te :
-
Transmission line reactance before STATCOM
- x bv :
-
Transmission line reactance next STATCOM
- \(T_{{{\text{d}}01}}^{\prime} , \, T_{{{\text{d}}02}}^{\prime}\) :
-
Field time constant for generator 1, 2
- T A1 , T A2 :
-
Time constant of voltage regulator for generator 1, 2
- KA1, KA2 :
-
Gain of voltage regulator for generator 1, 2
References
Aboul-Ela A, Sallam J McCalley, Fouad A (1996) Damping controller design for power system oscillations using global signals. IEEE Trans Power Syst 11(2):767–773
Adefarati T, Bansal RC (2016) Integration of renewable distributed generators into the distribution system: a review. IET Renew Power Gener 10(7):873–884
Alhelou H, Hamedani-Golshan M-E, Zamani R, Heydarian-Forushani E, Siano P (2018) Challenges and opportunities of load frequency control in conventional, modern and future smart power systems: a comprehensive review. Energies 11(10):2497
Asghari R, Mozafari B, Naderi MS, Amraee T, Nurmanova V, Bagheri M (2018) A novel method to design delay-scheduled controllers for damping inter-area oscillations. IEEE Access 6:71932–71946
Başar T, Bernhard P (2008) H-infinity optimal control and related minimax design problems: a dynamic game approach. Springer, Berlin
Bevrani H, Feizi MR, Ataee S (2015) Robust frequency control in an islanded microgrid: H∞ and μ-synthesis approaches. IEEE Trans Smart Grid 7:1–1
Buijs P, Bekaert D, Cole S, Van Hertem D, Belmans R (2011) Transmission investment problems in Europe: going beyond standard solutions. Energy Policy 39(3):1794–1801
Canizares C et al (2017) Benchmark models for the analysis and control of small-signal oscillatory dynamics in power systems. IEEE Trans Power Syst 32(1):715–722
Chatterjee D, Ghosh A (2011) Improvement of transient stability of power systems with STATCOM-controller using trajectory sensitivity. Int J Electr Power Energy Syst 33(3):531–539
Chitara D, Niazi KR, Swarnkar A, Gupta N (2018) Cuckoo search optimization algorithm for designing of a multimachine power system stabilizer. IEEE Trans Ind Appl 54(4):3056–3065
Dasu B, Sivakumar M, Srinivasarao R (2019) Interconnected multi-machine power system stabilizer design using whale optimization algorithm. Prot Control Mod Power Syst 4(1):2
Geng L, Yang Z, Zhang Y (2018) A weighting function design method for the H-infinity loop-shaping design procedure. In 2018 Chinese control and decision conference (CCDC), Shenyang, pp 4489–4493
Ghosh P, Kalwar A (2018) Application of particle swarm optimization-TVAC algorithm in power flow studies. In: Bera R, Sarkar S, Chakraborty S (eds) Advances in communication, devices and networking. Lecture notes in electrical engineering, vol 462. Springer, Singapore. https://doi.org/10.1007/978-981-10-7901-6_100
Gu D-W, Petkov PH, Konstantinov MM (2006) Robust control design with MATLAB®. Springer, Berlin
Halder A, Mondal D (2015) Design of nonlinear and conventional STATCOM controllers to mitigate transient stability of a power system. In: 2015 IEEE power, communication and information technology conference (PCITC), Bhubaneswar, India, pp 66–71
Hannan MA et al (2018) Artificial intelligent based damping controller optimization for the multi-machine power system: a review. IEEE Access 6:39574–39594
Krishna S (2014) An introduction to modelling of power system components. Springer, Berlin
Kundur P (1994) Power system stability and control. Tata McGraw-Hill Education, New York
Li XP, Chang BC, Banda S, Yeh H (1992) Robust control systems design using H-infinity optimization theory. J Guid Control Dyn 15(4):944–952
Lundström P, Skogestad S, Wang Z-Q (1991) Performance weight selection for H-infinity and μ-control methods. Trans Inst Measur Control 13(5):241–252
Miotto EL, de Araujo PB, de Fortes EV, Gamino BR, Martins LFB (2018) Coordinated tuning of the parameters of PSS and POD controllers using bioinspired algorithms. IEEE Tran Ind Appl 54(4):3845–3857
Mirjalili S, Lewis A (2016) The whale optimization algorithm. Adv Eng Softw 95:51–67
Morshed MJ, Fekih A (2019) A probabilistic robust coordinated approach to stabilize power oscillations in DFIG-based power systems. IEEE Trans Ind Inf 32:1–1
Padiyar KR (1999) Power system dynamics: stability and control. Wiley, Hoboken
Pal B, Chaudhuri B (2006) Robust control in power systems. Springer, Berlin
Patra AK, Mohapatra SK, Thakur S (2018) Application of firefly based for coordinated design of PSS and PID based SSSC-based controller. In 2018 Technologies for smart-city energy security and power (ICSESP), pp 1–7
Patwal RS, Narang N, Garg H (2018) A novel TVAC-PSO based mutation strategies algorithm for generation scheduling of pumped storage hydrothermal system incorporating solar units. Energy 142:822–837
Peres W, Silva Júnior IC, Passos Filho JA (2018) Gradient based hybrid metaheuristics for robust tuning of power system stabilizers. Int J Electr Power Energy Syst 95:47–72
Sadegh V-Z (2013) Design of power system stabilizers based on robust control theory. Iran J Sci Technol Trans Electr Eng 27(4):713–726
Safari A, Ahmadian A, Golkar MAA (2013) Controller design of STATCOM for power system stability improvement using honey bee mating optimization. J Appl Res Technol 11(1):144–155
Sahu PR, Hota PK, Panda S (2019) Modified whale optimization algorithm for coordinated design of fuzzy lead-lag structure-based SSSC controller and power system stabilizer. Int Trans Electr Energy Syst 29:e2797. https://doi.org/10.1002/etep.2797
Sahu PR, Hota PK, Panda S (2018) Modified whale optimization algorithm for fractional-order multi-input SSSC-based controller design. Optim Control Appl Methods 39(5):1802–1817
Shahalami SH, Farsi D (2018) Analysis of load frequency control in a restructured multi-area power system with the Kalman filter and the LQR controller. AEU Int J Electron Commun 86:25–46
Sharma G, Nasiruddin I, Niazi KR, Bansal RC (2016) Robust automatic generation control regulators for a two-area power system interconnected via AC/DC tie-lines considering new structures of matrix Q. IET Gener Transm Distrib 10(14):3570–3579
Souza AG, Souza LCG (2019) Design of a controller for a rigid-flexible satellite using the H-infinity method considering the parametric uncertainty. Mech Syst Signal Process 116:641–650
Tang Y, He H, Wen J, Liu J (2015) Power system stability control for a wind farm based on adaptive dynamic programming. IEEE Trans Smart Grid 6(1):166–177
Tavakoli MR, Rasouli V, Nasajpour HR, Shaarbafchizadeh M (2014) A new simultaneous coordinated design of STATCOM controller and power system stabilizer for power systems using cultural algorithm. In: 2014 IEEE international energy conference (ENERGYCON), Cavtat, Croatia, pp 446–450
Wang HF (1999a) Phillips–Heffron model of power systems installed with STATCOM and applications. IEE Proc Gener Transm Distrib 146(5):521
Wang HF (1999b) Modelling STATCOM into power systems. In: PowerTech Budapest 99. Abstract Records. (Cat. No.99EX376), Budapest, Hungary, p 302
Wang HF (2003) Modelling multiple FACTS devices into multi-machine power systems and applications. Int J Elect Power Energy Syst 25(3):227–237
Wolter JF (2017) Power generation systems with integrated renewable energy generation, energy storage, and power control. US20170117716A1
Xie W (2016) H ∞ performance realisation and switching controller design for linear time-invariant plant. IET Control Theory Appl 10(4):424–430
Zhang X, Conejo AJ (2018) Robust transmission expansion planning representing long- and short-term uncertainty. IEEE Trans Power Syst 33(2):1329–1338
Zhang W, Xu Y, Dong Z, Wong KP (2017) Robust security constrained-optimal power flow using multiple microgrids for corrective control of power systems under uncertainty. IEEE Trans Ind Inf 13(4):1704–1713
Ziaee O, Alizadeh-Mousavi O, Choobineh FF (2018) Co-optimization of transmission expansion planning and TCSC placement considering the correlation between wind and demand scenarios. IEEE Trans Power Syst 33(1):206–215
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
1.1 Power system parameters
-
SMIB system with STACOM:
-
SATCOM parameters:
-
Cdc = 1.0 pu; Vdc = 1 pu; me = 0.7; xe = 0.15 pu
-
Synchronous Generator parameters:
-
X1d = 0.3; x1q = 0.6; M = 6.0; D = 0; xd = 1;
-
Other parameters:
-
Ka = 50; Ta = 0.01
-
Hardy Space Weighing functions:
-
W1 = []; W2 = 1 * 10−5; W3 = []
-
Two-area system with STATCOM:
-
M1 = M2 = 6.0; D1 = D2 = 0;
-
Vt1 = 1.0; Vt2 = 0.89;
-
Ka1 = Ka2 = 50; Ta1 = Ta2 = 0.01; Td011 = Td012 = 6.3;
-
xe = 0.15; x1L = 0.3; x2L = 0.3;
-
Load parameters:
-
Pe1 = Pe2 = 0.8; Qe1 = Qe2 = 0.2;
-
Hardy Space Weighing functions:
-
W1 = 0.2e−10 * (0.05 * s + 1)/(50 * s + 1); W2 = 1e−4; W3 = 0.2e−13 * (0.05 * s + 1)/(50 * s + 1);
-
Two-area four-generator system with STATCOM:
-
Xd = 1.8; Xq = 1.7; Xl = 0.2; \(X_{d}^{\prime}\) = 0.3; \(X_{d}^{\prime}\) = 0.55; \(X_{d}^{\prime\prime}\) = 0.25; \(X_{\rm q}^{\prime\prime}\) = 0.25; Ra = 0.0025; \(T_{d0}^{\prime }\) = 8; \(T_{q0}^{\prime }\) = 0.4; \(T_{d0}^{\prime \prime}\) = 0.03; \(T_{q0}^{\prime\prime}\) = 0.05; H = 6.5 (for G1, G2); H = 6.175 (for G3, G4); KD = 0
-
Base values: 100 MVA, 230 kV
-
Transmission line parameters:
-
r = 0.0001 pu/km; xL = 0.001 pu/km; bC = 0.00175 pu/km
-
Optimization Algorithm Parameters:
PSO-TVAC: | |||
Swarm size = 20 | Max_iteration = 100 | ||
wmin = 0.4 | wmax = 0.9 | ||
c1i = 2.5 | c1f = 0.2 | c2i = 0.2 | c2f = 2.5 |
WOA: | |||
SearchAgents_no = 30 | Max_iteration = 100 | ||
Rights and permissions
About this article

Cite this article
Devarapalli, R., Bhattacharyya, B. A Framework for \(H_{2} /H_\infty\) Synthesis in Damping Power Network Oscillations with STATCOM. Iran J Sci Technol Trans Electr Eng 44, 927–948 (2020). https://doi.org/10.1007/s40998-019-00278-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40998-019-00278-4