
Abstract
The massive increase in the utilization of Distributed Generation (DG) units in the traditional Electric Distribution Networks (EDNs) enforces the distribution companies’ operators to enhance the technical performance of EDNs while considering economic perspectives. This challenge paves the way for developing a multi-objective optimization platform to tackle the techno-economic problems while respecting system uncertainties as well as the operational policy of the distribution companies. As a motivating solution for this multi-objective problem, this paper introduces the application of three nature-inspired algorithms as multi-objective optimization techniques for enhancing the techno-economic performance of EDNs through the integration of multiple Renewable Energy Resources (RERs). Grasshopper Optimization Algorithm (GOA), Salp Swarm Algorithm (SSA) and Moth Flame Optimization Algorithm (MFO), have been employed in this comparative study to minimize the active power losses, enhance the Fast Voltage Stability Index (FVSI) and reduce the total costs, considering the penetration level specified margin as well as and the framework of the DG units’ operating power factor constraints. The proposed algorithms have been implemented in the MATLAB environment and applied on various benchmark IEEE test systems (33-bus, 57-bus and 300-bus) as a mimic, small and large EDNs. A realistic part of the Egyptian distribution network (171-bus) is also introduced as a practical, applicable case study. The attained results show that the suggested optimization platform especially using MFO, is more effective and successful in determining and finding the optimal locations and capacities of different DG types for getting the optimal value of the objective function in minimum time within a minimum number of iterations.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
The increased load demand, the global direction towards a clean environment by reducing the CO2 emissions and the enormous development of RERs technologies have played an important role in the expansion of the Distributed Generation (DG) into the Electric Distribution Networks (EDNs) [1]. Generally, DGs, unlike big central power plants, are connected to or in close to load centers by the governmental utilities or the private sector via different investment schemes to supply customers with electricity locally and to reduce the total investments required for new huge power plants or transmission lines projects [2]. New DG-integrated EDNs are no longer passive as the power injected from the DGs changes the magnitude and even direction of network power flows. Thus, EDNs protection scheme, reliability, stability, power losses, voltage profile and power quality is changed due to DGs integration according to their types, locations, capacities, and operating power factor [3].
Literature Review
Generally, nature-inspired optimization algorithms are very effective in addressing and solving new problems in different fields of science and engineering by formulating them to optimization problems, subjected to complex nonlinear constraints.
In the science field, many researches are introduced in different aspects. For example, in [4], the authors have employed Whale Optimization Algorithm (WOA) for modeling the daily reference evapotranspiration to achieve water resource management goals such as irrigation scheduling. In addition, the authors of [5] have employed a hybrid model of bio-inspired metaheuristic optimization algorithms to assess the soil temperature impact on plant germination and growth. Also, predicting river streamflow time series is presented in [6] by Shuffled Frog Laping Algorithm (SFLA) for water resources planning and management. While, the Krill Herd Algorithm (KHA) is introduced in [7] as a tool to forecast, analyze, and monitor the solar radiation time series in different climatic zones. Furthermore, to optimize the use of the lake, precise prediction of the lake water level fluctuations the researchers presented this study [8], depending on the Grey Wolf Algorithm (GWO).
However, in the Engineering field, especially the renewable distributed generation resources integration, many researchers have addressed the implementation of distributed generation resources within the distribution networks by introducing several techniques for enhancing their performance. These techniques can be divided into three acting categories: heuristic, numerical, and analytical based [9]. The authors of [10] presented the DG allocation problem to optimize system losses, voltage stability and voltage deviations using the Monte Carlo simulation (MCS) integrated with some bio-inspired algorithms, which are, Manta-ray Foraging Optimization (MRFO), Grey wolf optimizer (GWO), WOA and Satin Bird Optimization (SBO) under load uncertainties. The study was implemented and applied to IEEE 33 and 69-bus radial systems and resulted in determining the optimal locations which provide an improvement in the system’s monitored parameters. However, the study didn’t compare between algorithms using graphics. In addition, the study [11] introduced the PSO algorithm for solving the location and sizing of DGs to decrease the power loss, enhance the voltage profile, and reduce the line current of a reconfigured radial IEEE-33 bus distribution system. The simulation results demonstrated that the proposed technique is comparatively efficient in reaching the objective function. In addition, a new method based on Coyote Algorithm (COA) is presented in [12] for distributed generation resources placement with a single objective of minimizing the real power loss. The effectiveness of this method is assessed while applying it on two distribution systems 69-node and 119-node at two proposed scenarios the first is depending on reconfiguration only and the second supposes simultaneous reconfiguration and DG placement. The findings proved the effectiveness of COA in solving the problem, while, the network reconfiguration with optimizing the DG location and size is more effective. Moreover, the paper [13] presents two stages Grasshopper Optimization Algorithm (GOA) based Fuzzy multi-objective approach for optimal DGs sizing and placement, Electric Vehicle (EV) and Shunt Capacitors (SCs) for improving the power factor, real power loss and voltage profile. This study is applied to two networks 51 bus and 69 bus distribution systems. From the results, it can be deduced that the proposed two-stage methodology reached the desired distribution system performance.
In [14], the work has focused on a single objective for minimizing line losses through a comparative study between two mathematical optimization techniques, which are, Improved Harmony Search (IHS) and Bacterial Foraging-Differential Evolution (BF-DE). The algorithms proposed applied to the IEEE 10, 15, 33, 69-bus test systems. The objective function variables are power losses and cumulative voltage deviation, the DG size is considered not less than one-quarter of the load and not more than three-quarters of the load. A recommendation of a technique based on GA and stochastic load flow calculations is also introduced in [15] to optimize the location and size of a single photovoltaic DG type with two operating scenarios depending on inverter technologies, which are unity power factor or constant lagging power factor. The methodology has been applied to the IEEE 37-bus RDS to eliminate the total power losses in the distribution network. The authors of [16] have introduced the Particle swarm optimization (PSO) technique to optimize the issue of DG placement in RDS according to the single objective of minimizing active power losses where maximum DG capacity ranges between 0 and 50% of the total load. The technique has been implemented on IEEE 69 and 33-bus systems. In addition, a mix of active and reactive DG sources is recommended by the authors of [17]. PSO is introduced to get better results for minimizing power loss and enhancing the voltage profile. The study proposed different types of load models and it has been applied to the IEEE 33-bus RDS. In [18], the authors have introduced a single objective technique named Rank Evolutionary Particle Swarm Optimization (REPSO). The methodology has been applied to IEEE 33-bus RDS to optimize the system losses through siting and sizing of three DG units. Three other PSO algorithms, which are; Conventional Particle Swarm Optimization (CPSO), Inertia Weight Particle Swarm Optimization (IWPSO) and the Iteration Particle Swarm Optimization (IPSO) were used to validate the REPSO results. The authors of [19] have implemented a strategy using the Chaotic Artificial Bee Colony (CABC) algorithm for finding the optimal distribution system allocation of two DG types to reduce losses and improve FVSI. The study introduced the CABC algorithm and it has been applied to the IEEE 33 and 69-bus RDS. In [20], the authors proposed a single objective analytical loss minimization approach for the allocation of DGs, the solution has been tested and validated on IEEE 15 and 33-bus RDS. However, this is a sequential method, based on the deployment of one-by-one DG. A novel, nature-inspired algorithm defined as the Dragonfly algorithm has also been implemented in [21] to optimize the size of the DG units. The algorithm validation was conducted on IEEE 15, 33 and 69-bus test systems. In [22], researchers have developed a new approach known as War Optimization (WO) in which the methodology makes an analogy to the behavior of soldiers during the war, for optimizing the positioning and sizing of DG for real losses minimization in RDS. MFO is used to determine the DG units’ sizing and siting optimization problem in some researches as follows. In [23], the authors have assigned Photovoltaics (PVs) and wind turbine units to verify a single objective of power loss minimization by applying the MFO algorithm. The optimal allocation problem has been applied on an RDS from Egypt considering the uncertainties of the wind speed variations, the load demand and the solar irradiance. The results proved the effectiveness of MFO in determining the optimal locations and ratings of the hybrid of mix solar-wind units. Moreover, in [24] MFO-based approach is presented to solve DG location and size problem to improve the distribution networks voltage stability and losses reduction. The proposed methodology has been implemented on IEEE 33 and 69-bus RDS. Results showed that the MFO method is more accurate and quicker to find the solution compared to PSO. In the case of [25], Photovoltaics (PV) and wind turbines are applied by the MFO technique to three IEEE RDS of various sizes, which are 33, 69 and 118-bus systems. The work was subjected to a single objective of active power losses reduction. The study proved the robustness and reliability of the proposed MFO technique in solving the objective function compared to other existing optimization techniques. Also, SSA is discussed through some researches to address the DG units’ sizing and siting optimization problem as follows. In [26] the authors tried to enhance the system performance through reducing the power losses and decreasing the losses cost by using a Modified Mutated Salp Swarm Algorithm (MSSA) to find the optimal sizing and siting of PVs and Shunt Capacitor Banks (SCB) into IEEE 33 and 69-node RDS. The results have illustrated that MSSA gives better performance compared to other existing methods. Another multi-objective SSA-based approach was introduced in [27] to size and locate SCB and RERs on 33-Bus RDS in addition to a practical Egyptian case study. The authors have proposed two scenarios, where three SCB devices and three PV-type units are assumed in the first scenario. However, in the second Scenario, two wind turbines and one unit of PV-type in addition to the three SCB devices are considered. Findings proved the SSA superiority to GOA, PSO and Gravitational Search Algorithm (GSA). Furthermore, the authors of [28] proposed SSA to evaluate the technical, economic and environmental benefits of integrating DGs and SCB into the IEEE 33 and 69 bus test systems. Five operational cases are considered. The results obtained have shown that SSA is more effective in solving the problem than the existing optimization techniques. GOA is implemented successfully by authors of [29] for optimal placement of a predefined number of Battery Swapping Stations (BSS) and DG into 33-and 69-bus networks. The main objective is to improve the system’s performance by increasing the voltage stability and minimizing the energy losses. The results have proved that GOA is superior to other techniques, such as GSA, PSO and Artificial Bee Colony (ABC).
Motivation
The issue of DG allocation and size is a complex optimization problem and it is of great importance. Installing a DG unit at non-optimal locations may result in increased system losses and costs [30]. Determining the optimal size and location of different DG types due to predetermined study and specific objectives and constraints plays an important role in achieving beneficial effects and avoiding negative impacts. DG planning will require a comprehensive analysis of several factors, such as the number of units, the capacity of each unit, best location and operating power factor impact on the whole system’s operating characteristics, such as system losses, Fast Voltage Stability Index (FVSI), voltage profile, stability and reliability [31].
Based on the review discussed above, it can be observed that many optimization algorithms have been applied for solving the DG siting and sizing problem to improve the performance of the distribution systems. However, in most approaches, it is observed that the proposed methodologies have been applied to a limited number of small scale IEEE benchmark systems and did not introduce realistic case studies the DG units’ power factor has been considered as a set value and not an optimization problem variable vector and the objective function weighting coefficient values have been set according to the vision of the researchers without being subjected to a prior study. In the literature survey, several methodologies have correctly reflected the DG optimization problem. However, at the same time, these methods did not address the optimal mix of the four DG units’ types and also DG units’ max capacity ranges have not been determined according to the branches’ security constraints. In addition, the optimization of the required investment costs for the new DG unit’s installation is not considered as an objective at the same time while enhancing the dynamic performance. This paper attempts to address the above-mentioned issues of the previous researches.
Contribution
The current research (i) employed the pre-mentioned algorithms for solving four different categories of distributed resources allocation and sizing problem. (ii) Constructed a new objective function to improve the Voltage Stability, the active power losses and the overall additional costs. (iii) Implemented the fitness function while considering variable DGs’ operating power factor in addition to some additional system’s regulations constraints including (a) DGs’ penetration level, (b) DGS’ operating power factor limitations and (c) system’s voltage profile boundaries. (iv) validating the proposed approach by applying it to various IEEE test systems (33, 57 or 300 buses), beside a 171-bus realistic system to prove their effectiveness in solving different characteristics of complex systems. (v) Comparing the results with other optimization algorithms”.
Paper Organization
The following content of this article is structured as follows. Section 1 introduces the study topic and a literature survey for the previous researches associated with the DG sizing and siting problem. Section 2 presents the features and characteristics of various applicable DGs according to their types. Then, the proposed strategic placement algorithms and their advantages are introduced in section 3. Followed by an explanation of the solution steps in section 4 and the optimization problem formulation, objectives and constraints in Section 5. In Section 6, the IEEE benchmark test cases under review and the realistic distribution system are introduced, followed by the study validation in section 7and a detailed discussion of the findings in section 8. Finally, Section 9 highlights the overall conclusion of the paper.
Features of Different Used Dg Types
Most DG advantage studies have been categorized DGs into four types and the impact of DG units is highly dependent on the DG unit type. In this research, a mix of four types of DGs is introduced where siting and sizing criteria of the optimal mix are determined through comprehensive studies. These types are classified according to real and reactive power delivering capability, as follows [32, 33]:
-
First Type: DGs deliver only active power, such as the PVs and Fuel Cells (FCs) that are mostly integrated into the main grid by means of converters/inverters, which operate at a unity power factor.
-
Second Type: DGs supply only reactive power, like those of synchronous compensators and capacitor banks, which serve at zero power factor.
-
Third Type: DGs already provide active and reactive power, such as gas turbine synchronous machines, .etc.
-
Fourth Type: DGs generate active power and besides, they consume reactive power, such as induction generators, like those used in wind farms.
Wind turbines using the Doubly Fed Induction Generator (DFIG) can work in a similar way as the synchronous generator to produce or consume reactive energy in the advantage of dealing with variable wind speeds.
Proposed Strategic Placement Algorithms Based Methodologies
The following three nature-inspired optimization algorithms are introduced for efficient planning of multiple DG units as follows:
The MFO Technique
MFO is developed by Mirjalili as a new technique of meta-heuristic optimization. Moths are extremely close to those in the butterflies’ family. The most reality about moths is the distinctive navigation in the darkness, which is called transverse orientation. They fly in the darkness by maintaining a constant angle of the moon, and this process is more effective when flying in a direct line, practically while the light source is so far away. Figure 1 shows that moths travel in a spiral way when the light is quite near to moths. Ultimately, it converges towards the light, making sure the optimal solution is exploited [34]. By performing analogy in this study, moths’ populations are represented as the variable’s vectors, which are; the locations of multi-DG units, the capacities and the operating power factor of each unit. Furthermore, the moths’ positions are modified at each iteration according to the determination of the best flame position, which is represented as the objectives of minimizing total active power losses, enhancing the FVSI and minimizing the new cost of investment. While taking into consideration the moths’ positions limitations that is defined by lower and upper boundaries of the penetration level and the DG units operating power factor.

Moths travel regarding a near light source
The SSA Technique
The concept of this algorithm is based on the behavior of salps swarming and their navigation in the oceans. The salps are joined to create a chain swarm or a string. The principal causes of the swarming activity are still uncertain, but some researchers suggest that this string does the best movement trying to locate the better food area via a chief salp-assisted screening technique, while reminder salps are the followers. In this optimization technique, the user can determine the number of salps, the number of dimensions relies on the number of variables, which is defined in this study by 10 dimensions regarding the operating power factor, active and reactive power injection at probable buses locations. The optimizer begins with the random positioning of each salp and then each salp position is updated to swallow the best food based on the information obtained from the chief salp. Figure 2 explains the key steps of the SSA optimizer. The leader salp is then determined by estimating the fitness function for each salp. The leader salp position is allocated to be the source of the food and chased by the salp string and it is represented in this study by the objective function that consists of power losses, FVSI and the total cost. In each iteration in the optimization process, the previous salps locations are changed. If anyone of the salps (solutions) exits outside the screening area, it is returned to the predefined upper and lower boundaries, which are set in this problem for the penetration level and the DG units operating power factor [35].

Salps swarming chain
The GOA Technique
Grasshopper is a type of insect that is considered a pest because of its damage to crops and agricultural production. While grasshoppers are often seen individually in nature, they tend to be involved in one of the greatest swarms of whole creatures. The size of the swarm often becomes a continental scale and a disaster for crops. In this research, grasshoppers swarm represent the populations of variables vectors, which are the locations of multi-DG units, the capacities and the operating power factor of each unit. Millions of grasshopper nymph are leaping and shifting as rollers [36]. Such creatures have a complex social contact network that equips themselves with a specific predatory strategy. The network connects grasshoppers so that each grasshopper position can be aligned to the proper one. Grasshoppers, through the harmonization and community coordination in the network, can choose the predatory path, which in this work represents the minimization of the total active power losses, enhancement of the FVSI and minimizing the new required investments. Figure 3 explains the key steps of the GOA search agents through the social interaction within the network two opposing forces are assessing the search agents which are the attraction and reputation forces; attraction forces take the grasshoppers to the promising regions (exploit) however repulsion forces take them to the search space (explore). Furthermore, the comfort zone refers to the region where the two opposite forces are equal.

Grasshopper steps
The major solution steps of the proposed algorithms (MFO, SSA and GOA) are explained in detail in Figs. 4, 5, and 6, respectively.

MFO flowchart

SSA flowchart

GOA flowchart
The Advantages of the Proposed Techniques
-
These techniques are simple to be formed and integrated with complex and large networks from the mathematical and algorithmic standpoints.
-
They provide, in many instances, highly accurate results in minimum time and iterations number.
-
Their simple convergence criteria are employed to achieve the optimization problem by intrinsically benefits from high exploration and local optima avoidance compared to other algorithms.
-
There smooth transit from exploration to exploitation using an adaptive range which is reflected to results accuracy.
-
The best approximation of the global optimum is stored in a variable as the destination point and never gets lost during the optimization process.
Solution Steps
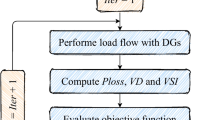
The above-mentioned approaches for solving the DG siting and sizing to verify the objective function follow the steps illustrated in Fig. 7.

Solution steps flowchart
Problem Formulation
In this paper, the optimization problem is a minimization problem which, given by Eq. (1) and it includes power losses, total investments cost and fast voltage stability index [37]:
Where;
- OF:
-
Objective function.
- Ploss0:
-
Total active power losses at base case (MW).
- Ploss:
-
Total active power losses after installing the DG units (MW).
- costDG :
-
Total cost of installed DG units in Million United States Dollar (MUSD$).
- costDGmax:
-
Largest DG units cost (MUSD$).
- FVSIm0:
-
Maximum voltage stability index at the base case.
- FVSIm:
-
Maximum voltage stability index after the installation of the DGs.
- W1, W2 and W3:
-
are the weighting coefficients. Where, W1+ W2+ W3 = 1.
In previous researches, the objective function weighting coefficient values were set according to the researchers’ priority vision. However, in this study, the weighting coefficient values are calculated through an analytical test carried out on the IEEE 33-bus test system to determine their most effective values that are verifying the optimal value of the OF and enhancement to its elements. Where all the possible values of W1, W2 and W3 (36 possibilities) are applied to the test system optimization problem and the changes in the objective function elements are monitored and recorded.
Table 1 shows the detailed results of changing the weighting coefficients values on the objective function elements, which are OF, Ploss, optimization time and FVSI.
Figure 8 shows the effect of changing the weighting coefficients values on the objective function problem and the system’s technical performance elements such as Ploss, optimization time, and FVSI. From Fig. 8, it is found that the alternatives from 15 to 36 must be rejected because they do not affect Ploss or FVSI. In addition, while the first alternative ranking is the best but its key influence is on Ploss. Therefore, it is recommended to choose the third alternative, which ranking is the second OF, in which the values of W1, W2 and W3 are 0.6, 0.3, and 0.1 respectively, as it has a consistent impact on both Ploss and FVSI.

Weighting coefficients impact on the objective function elements
Objectives
The main objectives of this article are minimizing Ploss, enhancing FVSI, improving power factor as well as minimizing the total additional costs while employing multi DG units mix at a time.
Constraints
The objective function is subjected to the following constraints:
Power Factor Constraints
Considering the framework of different types of DGs in this study, the DG unit’s power factor (PFDG) is determined according to operating conditions as following:
-
First Type: PFDG = 1
-
Second Type: PFDG = 0
-
Third, fourth Type: 0.3 < PFDG < 0.95 [38].
Penetration Level (%)
To maintain feeders’ security constraints according to the ANSI range, this study considered that the penetration level of DGs is varying from zero to 30% of the total system demand [39, 40].
Voltage Stability Index (VSI)
Stability of the distribution systems is a major consideration in distribution systems studies. Many publications discussed that point through different methods. In this study, systems’ stability regarding voltage is recommended to prevent voltage collapse when the system’s power flow changes due to changes in power generation. Line VSI value is determined from conventional Eq. (2), in which when its value is at least, the power failure is most sensitive [41].
Where,
- VSI:
-
Line Voltage stability index.
- Vs:
-
Sending end voltage (PU).
- R:
-
Resistance of the line (PU).
- X:
-
Reactance of the line (PU).
- PLi:
-
Active power load at ith bus (MW).
- QLi-:
-
Reactive power load at ith bus (MVAR).
- N:
-
Number of buses.
On the other hand, the system’s line stability index can also be determined from another fast and accurate method shown in Eq. (3) for determining FVSI [42]. FVSI resulted in values for all lines ranges between zero and one, where this value must be less than one for stable systems and as its value moves closer to one, this implies that the system is approaching its stable margin limit.
Where,
- Qr:
-
Reactive power at the receiving end (MVAR).
Figure 9 shows the stability margin increasing from m0 to MDG on the system’s P-V curve because of installing DG units with a capacity of ΔP (MW). Where the operation point moves from point A to B, and voltage also increases by the amount of VDG -V0 [43].

DG effect on power system’s operation and stability
Study Cases
To confirm the effectiveness of the proposed optimization methods on determining the optimal OF, this study introduces the application of these algorithms on different models of benchmark IEEE systems (33-bus, 57-bus and 300-bus) as mimic, small and large models [44, 45].
IEEE 33-bus is a radial distribution system consists of 33-bus, 32 branches, with a single central generator, a single substation located at bus 1, the total active and reactive load are 3.71 MW and 2.3 MVAR respectively. The main driver behind the selection of the IEEE 33-bus test system originates from that this system has large power losses w.r.t total power, which makes it suitable for benefiting from employing DGs to reduce power losses. The Simulation studies are carried out on this widely used distribution system to verify the proposed optimization techniques’ effectiveness in determining the optimal placement and sizing of DGs, the findings are promising.
IEEE 57-bus is the second test system used for validating the effectiveness of proposed methodologies. This power system consists of 57-bus, 80 branches, 7 central generators, 42 loads with an active and reactive load of 1250.8 MW and 336.4 MVAR, respectively. IEEE 57-bus test system is a good selection for studying how to invest the implementation of DGs for improving the system voltage profile and, therefore, enhancing the voltage stability.
IEEE 300-bus system is implemented in the light of the literature, which shows that few studies are applied to such large systems and to verify the remarkable performance of the algorithms in solving such large-scale systems. As a specific model for large-scale power systems, the proposed IEEE 300-bus consists of 300-bus, 69 generators, 304 transmission lines, and 195 loads with an active and reactive load of 23,525.8 MW and 7787.9MVAR respectively. Such large systems are a challenging issue for all optimization techniques and can be considered as practical implementation on how to conserve all the objectives while respecting all the boundaries and constraints. Figure 10 shows the single line diagram for a realistic part of the Egyptian distribution grid from the Canal Electricity Distribution Company (CEDC) for approving the applicability and effectiveness of the proposed approaches. It consists of 171-bus, two steps down power transformers (66/11 kV) each of 25 MVA capacity, and 87 different capacities step down distribution transformer (11/0.4 kV) connected to loads directly. The proposed grid’s total active and reactive loading is 15.68 MW and 8.63 MVAR, respectively [46].

A part of distribution grid from Canal Electricity Distribution Company-Egypt
Proposed Algorithm Validation
The proposed algorithms with the above-mentioned fitness function and constraints are validated by installing a single DG category (first and third group) into the 33-bus test system while the gained results are compared to some existing researches. Table 2 displays the findings for both voltages and power loss, while, it is observed the introduced techniques give better results while installing a DG with minimal capability that needs fewer direct costs.
Results and Discussion
Multi DG’s siting and sizing methodologies for the four pre-mentioned DG types are applied through the proposed optimization techniques on the benchmark IEEE test systems (33-bus, 57-bus and 300-bus) using Hadisaadat and Matpower load flow toolboxes under MATLAB R2016b. The studies are also carried out on a realistic part of the Egyptian distribution grid (171-bus).
The optimum DG siting and sizing have effects on the power losses, system’s voltage stability, voltage profile and total additional investments cost. The system performance after determining the optimal locations and sizes of multi DGs are studied according to different techniques results to get maximum benefits and to determine the best technique, where the results are discussed as following:
Table 3 shows the load flow results for the base cases under study, where the base case results were validated by comparing these results with results from Hadisaadat, Matpower and ETAP12.6.
Where;
- Pg:
-
Active power Generation (MW), Pd: Active power demand (MW),
- Ploss0:
-
Active power losses at base case (MW),
- Max VSI0:
-
maximum voltage stability index in the base case.
Table 4 describes a comprehensive comparison of the attained results from applying the suggested optimization techniques to the four above-mentioned systems. The optimal sizes and optimal locations of the optimal mix of the four DGs types are determined for each power system using the three optimization methodologies. In addition, the optimal operating power factor is determined for the third and the fourth type.
For IEEE 33-Bus System
Figure 11 shows the convergence curves for applying the optimization methodologies SSA, MFO, GOA with the pre-specified constraints on IEEE 33-bus. From Fig. 10, it could be noted that for the same number of iterations (300) and the same number of search agents (100), MFO converges faster than the others (SSA and GOA) in terms of minimum iterations number and low computation time. Moreover, MFO needs 40 iterations to converge to the optimal solution, whereas GOA and SSA require 59 and 133 iterations, respectively.

IEEE 33-bus convergence curves
A simple comparison between the results from applying the optimization techniques on IEEE 33-bus test system is shown in the following Figures, regarding the most important factors, which are the objective function (OF) values, maximum FVSI values, total running time, and active power losses in cascade. Figures 12, 13,14 and 15 show that SSA, MFO and GOA almost achieved typical solutions for determining optimal OF value, the same enhancement in the FVSI and active power losses. However, GOA selected higher DG units’ capacities to achieve the same results as MFO and SSA. Furthermore, MFO achieved the same result at the minimum computing time.

Objective function values

Max FVSI values

Running time

Active power losses
Figure 16 shows a comparison between the voltage magnitudes at base case (without installing any DGs) for each bus (v0) of the IEEE 33-bus test system and the new voltage magnitudes after applying the optimization problem. From the figure, it is noted that SSA, MFO and GOA almost achieved a typical efficient improvement in the overall system’s voltage profile. Where the maximum voltage improvement ratio reaches about 5.5% at buses 32 and 33, which are the buses at and near to the location of mounting a DG unit of the third type. It is worth mentioning that all the suggested algorithms succeeded in respecting the voltage limits ([0.95, 1.05] PU) with adequate stability margin for all busbars, whereas the base case had failed in keeping these limits at all busbars.

IEEE 33-bus system Voltage profile enhancement
For IEEE 57-Bus System
Figure 17 shows the convergence curves for applying the optimization methodologies SSA, MFO, GOA in cascade with the pre-specified criteria on the IEEE 57-bus system. The attained results showed that for the same number of iterations (300) and the same number of search agents (100), MFO converged in the minimum iterations number (57) with the best (lowest) OF value.

IEEE 57-bus convergence curve
The following figures show a simple comparison between the results of applying the optimization techniques to the IEEE 57-bus system. While MFO converged in the minimum iterations number, Fig. 18 shows that this technique also succeeded in getting the best OF value. In addition, it also verified the maximum enhancement in Ploss (39.9%) at a minimum running time, as shown in Figs. 20 and 21, respectively. However, Fig. 19 shows that the maximum FVSI enhancement is assessed via GOA (Figs. 20 and 21).

Objective function values

Max FVSI values

Running time

Active power losses
The voltage profile of the IEEE 57-bus network after the application of SSA, MFO and GOA is improved, as shown in Fig. 22. However, MFO achieves a promising acceptable voltage profile comparing to SSA and GOA. In addition, the maximum MFO improvement ratio reaches approximately 6.9% regarding the base case at bus number 57, which is the location of installing a DG of the third type.

IEEE 57-bus system Voltage profile enhancement
For IEEE 300-Bus System
Figure 23 shows that MFO supersedes GOA and SSA in achieving the best convergence response with 135 iterations to reach the best OF value under the same number of iterations (300) and the same number of search agents (100) constraints.

IEEE 300-bus convergence curve
From Figs. 24, 25 and 26, it can be noticed from results that MFO scored the best objective function value and maximum FVSI enhancement with a reduction of 28% at the minimum optimizing time. However, Fig. 27 shows that the system’s active power losses are highly reduced, and the maximum reduction resulted from GOA, which reached about 16.6%.

Objective function values

Max FVSI values

Running time

Active power losses
Figure 28 shows the voltage profile enhancement of the IEEE 300-bus system after applying the proposed optimization techniques. The proposed techniques resulted in achieving a very slight voltage profile enhancement with respect to the whole system. However, MFO achieved a high improvement ratio of up to 11%.at bus 178, where the DG of the second type is installed.

IEEE 300-bus system voltage profile enhancement
For the Realistic System (171-Bus)
Figure 29 demonstrates that MFO comes in the first rank with the best convergence response in terms of 70 iterations to reach the best OF value. Despite SSA and GOA require fewer iterations to converge, but both techniques do not succeed in attaining the best (lowest) OF value.

Realistic grid convergence curve
From Figs. 30, 31, 32 and 33, it can be noticed that MFO scored the best OF value with the maximum FVSI enhancement (22.3%) and maximum losses reduction (18.3%) at a minimum time.

Objective function values

Max FVSI values

Running time

Active power losses
The improvement of the realistic grid voltage profile is shown in Fig. 34. It is deduced that there is a promising voltage profile enhancement regarding the existing system voltage profile. MFO resulted in the best improvement in voltage magnitudes at the buses or near those to which the third type DG type is installed. The maximum voltage improvement occurred at busses 125,126, 127and 132, with an increased ratio of approximately 6.4%.

Realistic system voltage profile enhancement
Conclusion
This paper presents a comprehensive comparative study for multi-DGs sizing and siting based on different DG types. Three nature-inspired optimization algorithms (GOA, SSA and MFO) are employed for solving the integration problem of different DG types through distribution networks to optimize the overall systems’ techno-economic performance, considering the penetration level specified margin and the framework of the DG units’ operating power factor constraints. The proposed algorithms are tested on IEEE test systems (33-bus, 57-bus and 300-bus). In addition to a realistic Egyptian distribution network (171-bus) from Canal Electricity Distribution Company.
Results proved the effectiveness of the proposed techniques in solving the multi-objective optimal siting and sizing problem. Furthermore, the system voltage stability index is improved, active power losses and total additional costs are minimized. Moreover, MFO gives the best objective function value compared to SSA and GOA, in addition, the MFO algorithm converges in minimum time and number of iterations.
References
Elsisi M, Ebrahim MA et al (2021) Energy management of controllable loads in multi-area power systems with wind power penetration based on new supervisor fuzzy nonlinear sliding mode control. Energy 221:119867
Dkhili N, Eynard J, Thil S, Grieu S (2020) A survey of modelling and smart management tools for power grids with prolific distributed generation. Sustain Energy Grids Netw, Elsevier 21:100284
Hassan AS, Othman EA et al (2021) Distribution systems techno-economic performance optimization through renewable energy resources integration. Array 9:100050
Mohammadi B, Mehdizadeh S (2020) Modeling daily reference evapotranspiration via a novel approach based on support vector regression coupled with whale optimization algorithm. Agric Water Manag 237:106145
Moazenzadeh R, Mohammadi B (2019) Assessment of bio-inspired metaheuristic optimization algorithms for estimating soil temperature. Geoderma 353:152–171
Mohammadi B, Guan Y et al (2020) Adaptive neuro-fuzzy inference system coupled with shuffled frog leaping algorithm for predicting river streamflow time series. Hydrol Sci J 65(10):1738–1751
Mohammadi B, Aghashariatmadari Z (2020) Estimation of solar radiation using neighboring stations through hybrid support vector regression boosted by Krill Herd algorithm. Arab J Geosci 13:1–16
Guan Y, Mohammadi B et al (2020) Simulation of Titicaca Lake Water Level Fluctuations Using Hybrid Machine Learning Technique Integrated with Grey Wolf Optimizer Algorithm. Water 12(11):3015
Mohamed RG, Ebrahim MA (2021) Modeling, Analysis, and Control of Wide Distributed Large-Scale PV Power Plant Using Recent Optimization Techniques. In: In Handbook of Research on Modeling, Analysis, and Control of Complex Systems. IGI Global, pp 477–497
Hemeida MG, Alkhalaf S et al (2021) Optimal probabilistic location of DGs using Monte Carlo simulation-based different bio-inspired algorithms. Ain Shams Eng J 12(3):2735–2762
Haider W, Hassan S et al (2021) Voltage Profile Enhancement and Loss Minimization Using Optimal Placement and Sizing of Distributed Generation in Reconfigured Network. Machines 9(1):20
Nguyen TT, Nguyen NA, Duong TL (2021) A novel method based on coyote algorithm for simultaneous network reconfiguration and distribution generation placement. Ain Shams Eng J 12(1):665–676
Gampa SR, Jasthi K et al (2020) Grasshopper optimization algorithm based two-stage fuzzy multiobjective approach for optimum sizing and placement of distributed generations, shunt capacitors and electric vehicle charging stations. J Energy Storage (27:101117
Tyagi A, Verma A (2016) “Comparative study of IHS and BF-DE algorithm for optimal DG placement,” International Conference on Energy Efficient Technologies for Sustainability (ICEETS), IEEE, pp. 336–340
Caasi JKL, Aguirre RA (2016) “Comparative analysis of the optimal siting and sizing on different solar distributed generation models through stochastic method,” 2016 IEEE Innovative Smart Grid Technologies-Asia (ISGT-Asia), IEEE, pp. 4
Bansal A, Singh S (2016) “Optimal allocation and sizing of distributed generation for power loss reduction,” 2016 international conference & workshop on electronics and telecommunication engineering
Kumar M, Nallagownden P, Elamvazuthi I (2017) Optimal placement and sizing of distributed generators for voltage-dependent load model in radial distribution system. Renew Energy Focus, Elsevier 19:23–37
Jamian JJ, Mustafa MW, Mokhlis H (2015) Optimal multiple distributed generation output through rank evolutionary particle swarm optimization. Neurocomputing, Elsevier 152:190–198
Natarajan M, Balamurugan R (2015) Optimal placement and sizing of DGs in the distribution system for loss minimization and voltage stability improvement using CABC. Int J Electric Eng Informatics 7(4):679
Viral R, Khatod DK (2015) An analytical approach for sizing and siting of DGs in balanced radial distribution networks for loss minimization. Int J Electr Power Energy Syst, Elsevier 67:191–201
Suresh MCV, Belwin EJ (2018) Optimal DG placement for benefit maximization in distribution networks by using Dragonfly algorithm. Renew Wind Water Solar, Springer 5(1):4
Coelho FC, Junior IC et al (2018) Optimal distributed generation allocation using a new metaheuristic. J Control Autom Electric Syst, Springer 29(1):91–98
Kamel S, Ramadan A et al (2019) “Sizing and Evaluation Analysis of Hybrid Solar-Wind Distributed Generations in Real Distribution Network Considering the Uncertainty.” International Conference on Computer, Control, Electrical, and Electronics Engineering (ICCCEEE). IEEE, pp. 1–5
Sabri M, Ghallaj A et al (2019) Optimal multi-indices application of distributed generations in radial distribution networks based on moth-flame optimizer. Russ Electr Eng, Springer 90(3):277–284
Settoul S, Chenni R, Hasan HA et al (2019) “MFO Algorithm for Optimal Location and Sizing of Multiple Photovoltaic Distributed Generations Units for Loss Reduction in Distribution Systems,” 7th International Renewable and Sustainable Energy Conference (IRSEC), IEEE, pp. 1–6
Gholami K, Parvaneh MH (2019) A mutated salp swarm algorithm for optimum allocation of active and reactive power sources in radial distribution systems. Appl Soft Comput, Elsevier 85:105833
Tolba M, Rezk H et al (2018) A Novel Robust Methodology Based Salp Swarm Algorithm for Allocation and Capacity of Renewable Distributed Generators on Distribution Grids. Energies 11(10):2556
Sambaiah KS, Jayabarathi T (2019) Optimal Allocation of Renewable Distributed Generation and Capacitor Banks in Distribution Systems using Salp Swarm Algorithm. Int J Renew Energy Res 9:96–107
Sultana U, Khairuddin AB, Sultana B et al (2018) Placement and Sizing of Multiple Distributed Generation and Battery Swapping Stations using Grasshopper Optimizer Algorithm. Energy, Elsevier 165:408–421
Hassan AS, Othman EA et al (2020) Optimal integration of distributed generation resources in active distribution networks for techno-economic benefits. Energy Rep 6:3462–3471
Luo L, Gu W, Zhang XP, Cao G et al (2018) Optimal siting and sizing of distributed generation in distribution systems with PV solar farm utilized as STATCOM (PV-STATCOM). Appl Energy, Elsevier 210:1092–1100
Sujatha MS, Roja V, Prasad TN (2019) Multiple DG placement and sizing in radial distribution system using genetic algorithm and particle swarm optimization. Computational Intelligence and Big Data Analytics, Springer:21–36
Gumilar L, Habibi MA et al (2020) “Analysis of Short Circuit on Four Types Wind Power Plants as Distributed Generation,” 2020 International Conference on Smart Technology and Applications (ICoSTA), IEEE, pp. 1–5
Mirjalili S (2015) Moth-flame optimization algorithm A novel nature-inspired heuristic paradigm. Knowl-Based Syst, Elsevier 89:228–249
Mirjalili S et al (2017) Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv Eng Softw, Elsevier 114:163–191
Saremi S, Mirjalili S, Lewis A (2017) Grasshopper optimization algorithm: theory and application. Adv Eng Softw, Elsevier 105:30–47
Yahyazadeh M, Rezaeeye H (2020) Optimal Placement and Sizing of Distributed Generation Using Whale Optimization Algorithm Considering Voltage Stability and Voltage Profile Improvement, Power Loss and Investment Cost Reducing. Iran J Sci Technol Trans Electric Eng, Springer 44(1):227–236
Silva VRN, Kuiava R (2019) Loading margin sensitivity in relation to the wind farm generation power factor for voltage preventive control. J Control Autom Electric Syst, Elsevier 30(6):1041–1050
Ampofo DO, Otchere IK (2017) “An investigative study on penetration limits of distributed generation on distribution networks,” 2017 IEEE PES Power Africa, IEEE, pp 573-576
Hoke A, Butler R, Hambrick J et al (2012) Steady-state analysis of maximum photovoltaic penetration levels on typical distribution feeders. IEEE Trans Sustain Energy IEEE 4(2):350–357
Rawat MS, Vadhera S et al (2020) Probabilistic Approach to Determine Penetration of Hybrid Renewable DGs in Distribution Network Based on Voltage Stability Index. Arab J Sci Eng, Springer 45(3):1473–1498
Roshan R, Samal P, Sinha P (2020) Optimal placement of FACTS devices in power transmission network using power stability index and fast voltage stability index. Int Conf Electric Electron Eng (ICE3) IEEE 14:246–251
Adetokun BB, Muriithi CM et al (2020) Voltage stability assessment and enhancement of power grid with increasing wind energy penetration. Int J Electr Power Energy Syst, Elsevier 120:105988
Saadat H (1999) Power system analysis, vol 2. McGraw-Hill, Boston
Zimmerman RD, Murillo-Sánchez CE et al (1997) Matpower: a MATLAB power system simulation package. Power Systems Engineering Research Center, Ithaca
Canal Electricity Distribution Company (CEDC), Egyptian Electricity Holding company (EEHC)
Ali ES, Abd Elazim SM, Abdelaziz AY (2017) Ant Lion Optimization Algorithm for optimal location and sizing. Renew Energy 101:1311–1324
VC VR (2018) Optimal renewable resources placement in distribution networks by combined power loss index and whale optimization algorithms. J Electric Syst Inform Technol 5(2):175–191
Ebrahim MA, Wadie F, Abd-Allah MA (2019) An algorithm for detection of fault, islanding, and power swings in dg-equipped radial distribution networks. IEEE Syst J 14(3):3893–3903
Maher M, Ebrahim MA, Mohamed EA, Mohamed A (2017) Ant-lion optimizer based optimal allocation of distributed generators in radial distribution networks. Int J Eng and Inform Syst 1(7):225–238
Murthy VVSN, Kumar A (2013) Comparison of optimal DG allocation methods in radial distribution systems based on sensitivity approaches. Int J Electr Power Energy Syst 53:450–467
Devabalaji K, Ravi K (2016) Optimal size and siting of multiple DG and DSTATCOM in radial distribution system using bacterial foraging optimization algorithm. Ain Shams Eng J 7:959–971
Farh HM, Al-Shaalan AM, Eltamaly AM, Al-Shamma’A AA (2020) A novel crow search algorithm auto-drive PSO for optimal allocation and sizing of renewable distributed generation. IEEE Access 8:27807–27820
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Hassan, A.S., Othman, E.A., Bendary, F.M. et al. Improving the Techno-Economic Pattern for Distributed Generation-Based Distribution Networks via Nature-Inspired Optimization Algorithms. Technol Econ Smart Grids Sustain Energy 7, 3 (2022). https://doi.org/10.1007/s40866-022-00128-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40866-022-00128-z