
Abstract
In this paper, synchronization of fuzzy modeling chaotic time delay memristor-based Chua’s circuits is presented. Based on T–S fuzzy models, not only fuzzy model of the time delay memristor-based Chua’ circuit is constructed but the fuzzy control vector can also be derived to synchronize two different time delay memristor-based Chua’s circuits. Due to the dynamical behavior with complex transient transitions of the memristor-based chaotic system which is heavily dependent on the initial state of the memristor except for the circuit parameters, the memristor-based chaotic system can generate more complex and unpredictable time domain signals. An application to chaos secure communication is used to demonstrate the effectiveness of the proposed chaotic synchronization scheme.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Memristor, the missing fourth passive circuit element, is a nano-scale circuit element originally postulated by Chua [1] and realized by a team led by Stanley William from the Hewlett-Packard Company [2]. Recently, research on circuit based on memristor is becoming a focal topic for research because it will reduce power consumption to use memristors in computer by saving the time to reload data and could lead to the human-like learning. Memristor, a thin semiconductor film between two metal contacts with variable resistance which changes automatically as its voltage changing, can be used as a tunable parameter in control systems [2]. Nowadays, memristor-based systems have been applied in many practical fields such as lag synchronization of memristive neural networks application in pseudo-random generators [3], image encryptions by lag synchronization of switched neural networks [4], global exponential stabilization of memristive neural networks and neuromorphic circuits design [5], and dynamic behaviors of memristor-based delayed recurrent networks analysis [6].
The memristor is a passive two-terminal electronic device between the device terminal voltage v(t) and terminal current i(t) [2, 7–9] as shown in Fig. 1, defined as \(v(t) = M(q(t))i(t)\) or \(i(t) = W(\varphi (t))v(t)\), where the nonlinear functions \(M(q)\) and \(W(\varphi )\) are called memristance and memductance, respectively. In the Chua’s circuit case as shown in Fig. 3, the nonlinear resistor is replaced by a flux-controlled memristor whose constitutive relation is described in Fig. 2 and can be expressed as

Charge-controlled memristor (left) and flux-controlled memristor (right)

The constitutive relation of the flux-controlled memristor
where \(a,\,b > 0\). Therefore, the memductance can be obtained from the \(q(\varphi )\) as
Time delay which is a source of instability, chaos, and oscillation is frequently encountered in linear or nonlinear systems such as communication circuits, teleoperation systems, electronic circuits, chemical processes, biosystems, and so forth [10–12]. Many applicable researches have been done in time-delay chaotic system, since chaos in time-delay system developed by Mackey and Glass [13]. As it is difficult to achieve satisfactory performance with time-delay systems, the stability issue of time-delay systems is practically important in many real-world physical systems.
Owing to its practical applications in many different engineering fields, chaotic synchronization proposed by Pecora and Carroll [14] between drive and response systems has aroused much attraction. Many approaches have been explored for chaotic systems synchronization, for instance, adaptive control, sliding mode control, backstepping design, active control [15–17] and exponential Synchronization for Fractional-Order Chaotic Systems [18]. Based on the universal approximation theorem, fuzzy systems have supplanted conventional technologies in many scientific applications and engineering systems such as Takagi–Sugeno fuzzy systems H∞ control [19] and stability and stabilization criteria for fuzzy neural networks [20]. The fuzzy modeling and synchronization of different memristor-based chaotic circuits is presented in [21]. In this paper, a Takagi–Sugeno (T–S) fuzzy is constructed to approximate a time delay memristor-based Chua’s circuit. Moreover, the fuzzy control vector will be designed to synchronize two different time delay memristor-based Chua’s circuits and the secure communication applications are provided based on the proposed chaotic synchronization structure.
The rest of this paper is organized as follows. In Sect. 2, T–S fuzzy modeling of time delay memristor-based Chua’s circuit is introduced. Fuzzy synchronization issue will be discussed in Sect. 3. Simulation examples are given in Sect. 4. Finally, the conclusion of the paper is drawn in Sect. 5.
2 T-S fuzzy Modeling of Time Delay Memristor-Based Chua’s Circuits
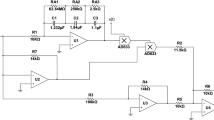
Some memristor-based Chua’s circuits have been proposed by replacing the nonlinear resistor by a memristor and investigated [9, 22]. A time delay memristor-based Chua’s circuit is introduced as shown in Fig. 3 [23] to design a signal generator to produce chaotic behavior by adding a small-amplitude voltage time-delay feedback in the memristor-based Chua’s circuit.

Time delay memristor-based Chua’s circuit
The dynamic of the time delay memristor-based Chua’s circuit with a flux-controlled memristor is given by the following set of differential equations:
where functions \(q(\varphi )\) and \(W(\varphi )\) are described in (1) and (2), respectively. If the following variables and parameter are defined as \(x_{1} = v_{1}\), \(x_{2} = v_{2}\), \(x_{3} = i\), \(x_{4} = \varphi\), \(\frac{1}{{RC_{1} }} = \alpha_{1}\), \(\frac{1}{{C_{1} }} = \alpha_{2}\), \(\frac{1}{{RC_{2} }} = \alpha_{3}\), \(\frac{1}{{C_{2} }} = \alpha_{4}\), \(\frac{1}{L} = \alpha_{5}\), \(\frac{r}{L} = \alpha_{6}\), \(\frac{\varepsilon }{L} = \alpha_{7}\), the (3) can be rewritten as the following form.
where the piecewise linear function \(W(x_{4} )\) is given by
\(C_{1} = 0.1\), \(C_{2} = 1\), \(L = \frac{1}{18}\), \(r = \frac{1}{45}\), \(R = 1\), \(a = 0.3\), \(b = 0.8\), \(\varepsilon = 3\), \(\sigma = 5\), \(\tau = 0.1\). Using Wolf’s method [24, 25] to calculate Lyapunov exponents, the results are \((0.2267,\) \(- 0.0017, - 0.1620, - 3.5196)\), from which we can obviously see that the system is in chaotic state. The 2D projections and 3D phase portraits of the chaotic attractor under the initial condition (0.1, 0.1, 0.1, 0.1) are as shown in Fig. 4.

The 2D projections and 3D phase portraits of the chaotic attractor
According to [21], the T–S fuzzy model for time delay memristor-based Chua’s circuit (4) consists of a collection of fuzzy IF–THEN rules as follows:
For \(\dot{x}_{1} \left( t \right) = \left( { - \alpha_{1} - \alpha_{2} W\left( {x_{4} \left( t \right)} \right)} \right)x_{1} \left( t \right) + \alpha_{1} x_{2} \left( t \right)\):Rule 1: IF \(\left| {x_{4} } \right| \le 1\) THEN
Rule 2: IF \(\left| {x_{4} } \right| > 1\) THEN
If \(M_{1}\) and \(\, M_{2}\) are defined as
the simplified two nonlinear subsystems can be obtained. The first nonlinear subsystem under fuzzy rule 1 is described as follows:
The state-space representation of (9) is given as
In the same way, the second nonlinear subsystem under fuzzy rule 2 is described as follows:
The state-space representation of (11) is given as
Therefore, the final output of the fuzzy time delay memristor-based Chua’s circuit is derived as follows:
where
and state vector \(x(t) = [x_{1} (t),x_{2} (t),x_{3} (t),x_{4} (t)]^{T}\) and \(f(x_{1} (t - \tau )) = \sin (x_{1} (t - \tau ))\). Based on this fuzzy model, complex chaotic behavior of the time delay memristor-based Chua’s circuit can be simplified by only two nonlinear subsystems. With a center average defuzzifier, the fuzzy system is represented as
where \(\beta_{i} = M_{i} \left( {M_{1} + M_{2} } \right)^{ - 1}\). From (9), \(M_{1} + M_{2} = 1\), we have \(\beta_{i} =\) \(M_{i}\).
To confirm the effectiveness of the proposed fuzzy model (14), the following parameter values and initial conditions are chosen as \(C_{1} = 0.1\), \(C_{2} = 1\), \(L = \frac{1}{18}\), \(\, r = \frac{1}{45}\), \(R = 1\), \(a = 0.3\), \(b = 0.8\), \(\varepsilon = 3, \, \sigma = 5, \, \tau = 0.1\), and \(x(0) = [0.1, \, 0.1,\) \(\, 0.1, \, 0.1]\). The 3D phase portraits of \(x_{1} - x_{2} - x_{3}\) and \(x_{1} - x_{2} - x_{4}\) are given in Fig. 5. The dynamical behaviors of \(x_{1}\), \(x_{2}\), \(x_{3} ,\) and \(x_{4}\) are shown in Fig. 6. We can see that the dynamical behaviors of the time delay memristor-based Chua’s circuit can be exactly predicted by T–S fuzzy model.

The 3D phase portraits of \(x_{1} - x_{2} - x_{3}\) and \(x_{1} - x_{2} - x_{4}\)

The dynamical behaviors of \(x_{1}\), \(x_{2}\), \(x_{3} ,\) and \(x_{4}\)
3 Fuzzy Synchronization of two Different Delay Memristor-Based Chua’s Circuits
In this section, the main objective is to design a fuzzy control vector \(u(t) = [u_{1} (t),u_{2} (t),u_{3} (t),u_{4} (t)]^{T}\) to synchronize drive and response time delay memristor-based Chua’s circuits. To begin with, consider the drive and response time delay memristor-based Chua’s circuits as follows:Drive system:
Response system:
where state vector \(y(t) = [y_{1} (t),y_{2} (t),y_{3} (t),y_{4} (t)]^{T}\). Subtracting the drive system (15) from the response system (16), the following error system can be obtained.
where error signal vector \(e\left( t \right) = [e_{1} (t),e_{2} (t),e_{3} (t),e_{4} (t)]^{T} = x\left( t \right) - y\left( t \right)\). Following the preceding analysis, we introduce the following theorem.
Theorem
Consider the drive system and response system given in (15) and (16), respectively. If the fuzzy control vector is expressed as
and the following conditions can be satisfied
where \(\varPsi_{xi}\) and \(\varPsi_{yi}\) are the feedback gain matrices. \(\varLambda_{x}\) and \(\varLambda_{y}\) are constant gain vectors. The error system is asymptotically stable and the response system (16) can synchronize with the drive system (15).
Proof
To begin with, by substituting control vector (18) into the error system (17), (17) can be rewritten as
Based on the conditions (19), the feedback gain matrices \(\varPsi_{xi}\) and \(\varPsi_{yi}\) can be obtained as
Simultaneously, the constant gain matrices \(\varLambda_{x}\) and \(\varLambda_{y}\) can be derived as
Therefore, the error system can be converted to the following form.
As a result, the error system is asymptotically stable, i.e., \(e_{1} (t) \to 0\), \(e_{2} (t) \to 0\), \(e_{3} (t) \to 0\), \(e_{4} (t) \to 0\) as \(t \to \infty\). The proof is completed.□
4 Simulation Examples
In this section, we will apply our fuzzy controller to synchronize drive and response time delay memristor-based Chua’s circuits. Moreover, the proposed synchronization approach will be used to realize its application in secure communication.
Example 1
Consider the drive system and response system given in (14) and (15), respectively. For this numerical simulation, the initial conditions and parameter values are given asDrive system:
Response system:
If \(F = - I_{4 \times 4}\) and \(B = I_{4 \times 4}\) are chosen, the feedback gains and constant matrices can be determined as
The 3D phase portraits and 2D projections before synchronization are shown in Fig. 7. The synchronization performance, the 3D phase portraits, and 2D projection, after fuzzy control vector is applied to the response system, are depicted in Fig. 8. The dynamical behaviors of (\(x_{1}\), \(x_{2}\), \(x_{3}\), \(x_{4}\)) and (\(y_{1}\), \(y_{2}\), \(y_{3}\), \(y_{4}\)) are given in Fig. 9, and the synchronization errors \(e_{1} (t)\), \(e_{2} (t)\), \(e_{3} (t)\), \(e_{4} (t)\) are described in Fig. 10. The fuzzy control inputs \(u_{1} (t)\), \(u_{2} (t)\), \(u_{3} (t)\), \(u_{4} (t)\) are exhibited in Fig. 11.

The 3D phase portraits and 2D projections before synchronization

The 3D phase portraits and 2D projections after synchronization

The dynamical behaviors of (\(x_{1}\), \(x_{2}\), \(x_{3}\), \(x_{4}\)) and (\(y_{1}\), \(y_{2}\), \(y_{3}\), \(y_{4}\))

The synchronization errors \(e_{1} (t)\), \(e_{2} (t)\), \(e_{3} (t)\), \(e_{4} (t)\)

The control inputs \(u_{1} (t)\), \(u_{2} (t)\), \(u_{3} (t)\), \(u_{4} (t)\)
From Figs. 8, 9 and 10, it is obvious that drive and response systems are synchronized instantly when the fuzzy control vector is applied to the response system.
Example 2
In this example, we will apply our fuzzy modeling chaotic synchronization scheme to secure communication, thanks to the dynamical behavior with complex transient transitions of the memristor-based chaotic system which is heavily dependent on the initial state of the memristor except for the circuit parameters. Therefore, the memristor-based chaotic system can generate more complex and unpredictable time domain signals. The drive system and response system are given in (15) and (16), respectively, and all the system parameters are chosen as given in example 1. Figure 12 depicts a block diagram of the secure communication based on the time delay memristor-based Chua’ circuits.

The block diagram of the secure communication based on the time delay memristor-based Chua’ circuits
As an example, we consider an image of a rabbit and a cat as shown Fig. 13a2. To send the above image using the proposed synchronization scheme, the image must be digitized to become a digital information signal (0–255 levels) as shown in Fig. 13a1. The encrypted signal is shown in Fig. 13b. The decrypted signals, i.e., received signals, are shown in Fig. 13c. We can see that the transmitted digital information signal can be decrypted perfectly.

Signal encryption and recovery with memristor-based time delay Chua’s chaotic circuits
Remarks
-
1.
The memristor-based chaotic system can enable more complex and unpredictable time domain signals because the memory of initial state of the memristor plays a significantly important role in producing complicated transient transition dynamics.
-
2.
Based on our design scheme, the transmitted signals not only are complex and unpredictable but also have stronger anti-attack ability and anti-translated capability than that transmitted by the other existing transmission model.
5 Conclusions
In this paper, based on T-S fuzzy modeling, chaotic synchronization of two different time delay memristor-based Chua’s circuits has been proposed and three main contributions are achieved as follows:
-
(1)
The fuzzy model of the time delay memristor-based Chua’s circuit is constructed only by two simplified nonlinear subsystems.
-
(2)
The fuzzy control vector is derived to synchronize two different time delay memristor-based Chua’s circuits.
-
(3)
The proposed fuzzy modeling chaotic synchronization scheme is applied to secure communication.
Simulation results show that the dynamical behaviors of the time delay memristor-based Chua’s circuit can be exactly predicted by T–S fuzzy model and a secure communication application is performed to confirm that the transmitted digital information signal can be decrypted perfectly using the proposed chaotic synchronization scheme.
Furthermore, in general, time delays mainly exist in the communication channel or control terminal as the lag between the state output node and feedback channel. It is natural to consider time delay when dealing with synchronization problems within chaotic systems, i.e., lag synchronization, where the corresponding state vectors of response system follow the drive system with time delay, will be considered in the future work. In the meantime, the results of this paper will be extended to the interval type-2 FNN, as type-1 fuzzy logic control cannot fully handle or accommodate the linguistic and numerical uncertainties associated with dynamic unstructured environments.
References
Leon, O.C.: Memristor—the missing circuit element. IEEE Trans. Circuit Th 18(5), 507–519 (1971)
Strukov, D.B., Snider, G.S., Stewart, G.R., William, R.S.: The missing memristor found. Nature 453, 80–83 (2008)
Wen, S., Zeng, Z., Huang, T., Z., Yide.: Exponential adaptive lag synchronization of memristive neural networks via fuzzy method and applications in pseudorandom number generators. IEEE Trans. Fuzzy Syst. 22(6), 1704–1713 (2014)
Wen, S., Zeng, Z., Huang, T., Meng, Q., Yao, W.: Lag synchronization of switched neural networks via neural activation function and applications in image encryption. IEEE Trans. Neural Netw. Learn. Syst. (2015). doi:10.1109/TNNLS.2014.2387355
Wen, S., Huang, T., Zeng, Z., Chend, Y., Li, P.: Circuit design and exponential stabilization of memristive neural networks. Neural Networks 63, 48–56 (2015)
Wen, S., Zeng, Z., Huang, T.: Dynamic behaviors of memristor-based delayed recurrent networks. Neural Comput. Appl. 23(3–4), 815–821 (2013)
Joglekar, Y.N., Wolf, S.J.: The elusive memristor: properties of basic electrical circuits. Eur. J. Phys. 30, 661–675 (2009)
Chua, L.O., Sung, M.K.: Memristive devices and systems. Proc. IEEE 64, 209–223 (1976)
Itoh, M., Chua, L.O.: Memristor oscillation. Int. J. Bifurcat. Chaos Appl. Sci. Eng. 18, 3183–3206 (2008)
Li, Q.K., Zhao, J., Dimirovski, M., Liu, X.J.: Tracking control for switched linear systems with time-delay: statedependent switching method. Asian J. Control 11(5), 517–526 (2009)
Li, Q.K., Zhao, J., Dimirovski, M.: Robust tracking control for switched linear systems with time-varying delays. IET Control Theory Appl. 2(6), 449–457 (2008)
Orlov, Y., Belkoura, L., Richard, J.P., Dambrine, M.: Identifiability analysis of linear time delay systems. In: Proceedings of the 40th IEEE Conference on Decision and Control, Orlando, pp. 4776–4781 (2001)
Mackey, M., Glass, L.: Oscillation and chaos in physiological control systems. Science 197, 287–289 (1997)
Pecora, L.M., Carroll, T.L.: Synchronization in chaotic systems. Phys. Rev. Lett. 64, 821–824 (1999)
Cao, J., Li, L.: Cluster synchronization in an array of hybrid coupled neural networks with delay. Neural Netw. 22(4), 335–342 (2009)
Cao, J., Wang, Z., Sun, Y.: Synchronization in an array of linearly stochastically coupled networks with time delays. Phys. A 385(2), 718–728 (2007)
Li, X., Song, S.: Research on synchronization of chaotic delayed neural networks with stochastic perturbation using impulsive control method. Commun Nonlinear Sci Numer Simulat 19, 3892–3900 (2014)
Mathiyalagan, K., Park, J.H., Sakthivel, P.: Exponential synchronization for fractional-order chaotic systems with mixed uncertainties. Complexity (2014). doi:10.1002/cplx.21547
Vadivel, P., Sakthivel, R., Mathiyalagan, K., Thangara, P.: Robust stabilisation of non-linear uncertain Takagi-Sugeno fuzzy systems by H∞ control. IET Control Theory Appl. 6, 2556–2566 (2012)
Mathiyalagan, K., Sakthivel, R., Marshal Anthoni, S.: New stability and stabilization criteria for fuzzy neural networks with various activation functions. Physica Scripta 84(1), art. no. 015007 (2011)
Wen, S., Zeng, Z., Huang, T., Chen, Y.: Fuzzy modeling and synchronization of different memristor-based chaotic circuits. Phys. Lett. A 377(34–36), 2016–2021 (2013)
Song, Y., Shen, Y., Chang, Y.: Chaos control of a memristor-based Chua’s oscillator via backstepping method. In: International Conference of Information Science and Technology, pp. 1081–1084 (2011)
Jin, Ju, Yongbin, Yu., Liu, Yijing, Xiaorong, Pu, Liao, Xiaofeng: chaotic modeling of time-delay memristive system. Adv. Intell. Comput. Lect. Not. Comput. Sci. 6838, 634–641 (2012)
Wolf, A., Swift, J., Swinney, H., Vastano, J.: Determining Lyapunov exponents from a time series. Physica D 16(3), 285–317 (1985)
Siu, S.: Lyapunov exponent toolbox [Online] (2008). Available: http://www.mathworks.com/matlabcentral/fileexchange
Acknowledgments
This work is supported by the National Science Council of the Republic of China, under Grant NSC 102-2221-E-035-061-.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Lin, TC., Huang, FY., Du, Z. et al. Synchronization of Fuzzy Modeling Chaotic Time Delay Memristor-Based Chua’s Circuits with Application to Secure Communication. Int. J. Fuzzy Syst. 17, 206–214 (2015). https://doi.org/10.1007/s40815-015-0024-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-015-0024-5