
Abstract
In the present paper, we propose and study a fractional-order prey-predator type ecological model with the functional response of Holling type II and the effect of harvesting. In addition, we have also considered the influence of a super-predator on the conventional predator. The complex dynamical behaviour of the proposed model system including existence and uniqueness criteria, finiteness and nonnegativity of the solutions have studied rigorously. In addition, we have determined existence criteria of several equilibria and analyzed the asymptotic nature of those equilibria. We have enriched our analysis with the inclusion of fractional Hopf bifurcation and the criteria of global stability of the equilibrium points. Finally, some numerical simulation works have been incorporated to validate the analytical analysis.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Prey-predator models are very useful for acquiring the knowledge of dynamics of interacting populations of prey-predators and hence the prey-predator model acts a key role in both theoretical as well as experimental ecology and mathematical ecology. This type of ecological model will go forward as one of the key ideas due to its importance and simplicity (see Kar and Jana 2012; Fussmann et al. 2005; Chakraborty et al. 2012a; Mishra et al. 2016; Sahoo et al. 2016; Shaikh et al. 2018; Foutayeni et al. 2020; Khatua et al. 2020; Thakur et al. 2020). In the last few decades, these prey-predator theory have progressed very much but still there are lots of mathematical and ecological problems that can be studied through this tool. The dynamics of a prey-predator model are influenced by many constituents, e.g., the densities of prey and predators, harvesting of preys or predators or both etc. But the proposed model should be possible easiest biologically applicable form, even if the dynamics of the model may suggest difficult behaviour, e.g., stationary oscillations of the sizes of population, or suggest the dependency on some parameters, e.g., the “paradox of enrichment” (see for details Rosenzweig 1971) which indicates that increasing in the carrying capacity of the prey population conducts either to increase in size of the predator but not size of prey population or perniciously very much increase of predator population which is responsible for the extinction of prey populations. The kind of discussion observed in the articles [see (Berryman 1992; Jensen et al. 2005)] and in the book Arditi et al. 2012 renders rich inspiration for the study of the mathematical modelling on which common ecological models are constructed through the ordinary differential equations.
The functional response in pry-predator model is commonly defined as the number of preys that are predated by an individual predator in unit time. Functional response of a predator population acts a significant role in ecology (Berryman 1992). Usually two types of functional responses considered in mathematical ecology: prey-dependent and predator-dependent functional responses. In the case of prey-dependent functional response, we accept that the number of prey eaten by a single predator in unit time depends on the number of preys or density of the prey only, for example, Holling Types I–III (see Holling 1959). Therefore, this type of functional response is the function of prey density only. The predator-dependent functional response assumes the number of preys eaten by a single predator in unit time which depends on the density of prey and predator both, e.g., DeAngelis functional response (Mesterton 1996). Therefore, this type of functional response is the function of both the prey and predator populations. In this type of functional response, it is often called ratio-dependent because of it is the function of ratio of the prey population to the predator population (Arditi et al. 2012; Berryman 1992; Kumar et al. 2018),
Food is necessary to survive animals in the universe. Harvesting is nothing but the away of collecting or consuming food. But, we cannot continue to harvest fishes from the river or sea quicker than the unexhausted fishes can substitute their removed companions. If we do so then the sustainable of fish will damage and we will not get fish in the future. Similarly, we cannot keep harvesting farming crops if the quality and quantity of soil fatigues or sources of water become inadequate. In addition, we cannot preserve the diversity of the nature if we continue to drive species to extinction. To maintain sustainable food we should harvest scientifically. We commonly considered three types of harvesting in mathematical ecology: constant rate harvesting (Chakraborty et al. 2012b; Huang et al. 2013), proportional harvesting (Leard et al. 2008; Lenzini et al. 2010; Israel et al. 2015), and nonlinear harvesting (Clark 1979; Das et al. 2009; Jana et al. 2015; Agmour et al. 2020).
System of ordinary differential equations models for the interactions between species (e.g., prey-predator) is one of the classical approaches of mathematical ecology. In recent, researchers are interested in formulating mathematical models with the help of fractional-order differential equations as it is a magnificent tool for description of hereditary properties and also memory of several biological elements and it has very close relations to the fractals. These are the principal benefit of a mathematical model by fractional-order derivatives in analogy with models based on the classical ordinary-order derivatives in which such special properties are neglected. Therefore fractional-order differentiation is more realistic than ordinary differentiation. The fractional-order models have earned popularity after some famous books on fractional-order differential equations (Podlubny 1999; Miller et al. 1993; Hilfer 2000; Diethelm et al. 2003; Kilbas et al. 2006; Petras 2011). Fractional-order differential equations can be defined several ways. The most useful and popular definitions are in the sense of Riemann-Liouville, Grüunwald-Letnikov and the Caputo definitions. The Caputo definition is most popular and operable definition in mathematical ecology as in this definition the initial conditions are uttered in a similar fashion as we use for integer-order differentiations. There are limited theories for the mathematical model through fractional-order derivatives to analyze their dynamical behaviors (Delavai et al. 2012; Deshpande et al. 2017; Guo 2014; Hong Li et al. 2016; Liang et al. 2015; Li et al. 2010; Omar 2019a, b; Omar et al. 2019). In recent days, the linearization method, Lyapunov method and Lyapunov direct method (due to Lyapunov function) have proved to examine the stability of different stationary points of systems through fractional calculus.
Model formulation
We construct the following model in our present work:
Here, x and y describe the biomass densities of prey and the predator population at the time t respectively. Here all the parameters used in the model (2.1), \(r,~k,~a,~b,~m,~d,~\eta ,~q_1,~q_2\), and E are taken as positive. In the proposed model, r symbolizes intrinsic growth rate of the prey; the environmental carrying capacity of the prey is denoted by k; the natural death rate of the predator is referred by d; a/b denotes the maximum number of the prey eaten by each individual predator in unit time and 1/b be the necessary density of prey population inhabited in environment to attain one half of that rate; m be conversion rate of biomass of the prey to the predator population referring the total number of newly born predators for each of prey captured by the predator. The term \(\frac{ax}{1+bx}\) refers to the Holling type II functional response (see Holling 1959) of the predator. Here, we consider harvesting on both the prey and predator populations. In this regard, it is considered that \(q_1\) and \(q_2\) be the catchability coefficients of prey and the predator respectively; the combined harvesting effort to yield both these populations be E. Natural enemies of predators (i.e. super-predator) are being eradicated from an ecosystem because of predation by a higher trophic levels (e.g. eagle is a super-predator for the population of rats in grassland) or human activities, viz, usage of pesticides, hunting, etc. In this paper, we assume that the predators takes away from the ecosystem owing to predation by the super-predators (the natural enemy of a predator) ( Mbava et al. (2016). For the simplicity of the model, we do not look at the super-predator as a separate state variable, instead we consider the population of super-predator exhibit in the ecosystem at constant density (z) and assume the predation rate of super-predator (to the natural enemy, predator, y) as \(\eta\). Note that \(q_1E\) and \(q_2E\) are the harvesting mortality rate of the prey and the predator respectively.
Fractional-order form of our proposed model (2.1) is followed by
Here, for \(i=1, 2\), \(\alpha _i\in (0,1)\), \({}_{t_0}D_t^{\alpha _i}\) are the fractional order derivatives in the sense of Caputo ( Podlubny 1999; Petras 2011). Here, we consider different fractional differentiations \(\alpha _1\) and \(\alpha _2\) for prey and the predators respectively as the memory of several species are different in general. Since the left-hand dimension of first and second equations of (2.2) are \({\text{time}}^{-\alpha _1}\), \({time}^{-\alpha _2}\), respectively, and the right-hand dimension is \({\text{time}}^{-1}\), we correct the dimensions of the system as
For simplicity in representing (2.3), we substitute \(r={\tilde{r}}^{\alpha _1}\), \(k={\tilde{k}}\), \(a={\tilde{a}}^{\alpha _1}\), \(b={\tilde{b}}\), \(q_1=\tilde{q_1}^{\alpha _1}\), \(E={\tilde{E}}\), \(m={\tilde{m}}^{\alpha _2}\), \(d={\tilde{d}}^{\alpha _2}\), \(\eta ={\tilde{\eta }}^{\alpha _2}\), \(q_2=\tilde{q_2}^{\alpha _2}\) and then the system (2.3) reduces as
The system (2.5) for different fractional differentiation is known as an incommensurate fractional-order system and if \(\alpha _1=\alpha _2=\alpha \in (0,1)\), then this type of fractional differentiation is known as a commensurate fractional-order system which is followed by
The rest portion of the present work is prepared as follows: in “Some preliminaries”, we remember few important lemmas and theorems that help us to analyze our system. In “Dynamical behaviour of fractional order system”, we work out several equilibria of (2.5) and then by using these lemmas and theorem, we establish the non-negativity and boundedness of the solutions for our model system (2.5). The local and also global stability analysis of several equilibria are also discussed in “Dynamical behaviour of fractional order system”. Some numerical simulation works to confirm our analytical results are performed in the “Numerical simulations”. Finally, a brief discussion and conclusion are presented in “Conclusion and discussion”.
Some preliminaries
Here, we state some necessary definition, useful lemmas, and theorems for both types of commensurate and incommensurate fractional-order systems which help us to study the analytical results of our model.
Definition 3.1
(Petras 2011) The Caputo type fractional order derivative of \(\alpha >0\) order for the function \(f : { {C}}^n[t_0,\infty )\rightarrow {\mathbb {R}}\) may be defined and denoted by
where \({ {C}}^n[t_0,\infty )\) is a space of n times continuously differentiable functions on \([t_0,\infty )\), \(t> t_0\) and \(\Gamma (\cdot )\) be the Gamma function with \(n\in {\mathbb {Z}}^+\) (the set of all positive integers) such that \(n-1<\alpha <n\). Particularly, if \(0<\alpha <1\), the definition becomes
Lemma 3.1
(Odibat et al. 2007) Let us assume that \(\alpha \in (0,1]\) and both the functions f(t) and its fractional derivative \({}_{t_0}D_t^{\alpha }f(t)\) be elements of the metric space C[a, b]. If for all, \(t \in [a,b]\), \({}_{t_0}D_t^{\alpha }f(t)\ge 0\) then the function f(t) is a monotone increasing, but the function is monotone decreasing if \({}_{t_0}D_t^{\alpha }f(t)\le0\) for all \(t\in [a,b]\).
Lemma 3.2
(Hong Li et al. 2016) Let us consider that \(x:[t_0,\infty )\rightarrow {\mathbb {R}}\) be continuous function and satisfies the following:
Then, we have the inequality:
for all \(t\ge t_0\). Here \(E_{\alpha}\) is the Mittag-Lefflar function of one parameter.
Lemma 3.3
(Petras 2011) Assume the following fractional order system of the order \(\alpha \in (0,1]\)
where \(x\in {\mathbb {R}}^n\) and \(M\in {\mathbb {R}}^{n\times n}\). The system is said to be stable asymptotically iff \(|\arg (\lambda )|>\frac{\alpha \pi }{2}\) satisfy for each of the eigenvalues \(\lambda\) of the matrix M and the system is said to be stable only iff \(|\arg (\lambda )|\ge \frac{\alpha \pi }{2}\) for each of the eigenvalues of the matrix M with the eigenvalues satisfying the critical condition \(|\arg (\lambda )|=\frac{\alpha \pi }{2}\) must have geometric multiplicity one.
Lemma 3.4
(Petras 2011) Let us assume the fractional order system of the order \(\alpha \in (0,1]\)
where \(x\in {\mathbb {R}}^n\). A stationary point of the system is called to be locally asymptotically stable iff \(|\arg (\lambda _k)|>\frac{\alpha \pi }{2}\) for all eigenvalues \(\lambda _k~(k=1,2\ldots n)\) of Jacobian matrix \(J =\frac{\partial f}{\partial x}\) calculated at the corresponding stationary point.
Dynamical behaviour of fractional order system
Here, first we assume commensurate fractional-order system (2.5) by considering \(\alpha _1=\alpha _2=\alpha \in (0,1]\) in the incommensurate system (2.4).
Equilibria
We study the existence of the non-negative equilibria of the system (2.5). The system (2.5) possesses three possible equilibria which are (1) trivial equilibrium point \(E^0(0,0)\), (2) predator-free equilibrium point \(E^1(x^1,0)\) and (3) the interior equilibrium point \(E^*(x^*,y^*)\), where \(x^1=k(1-\frac{Eq_1}{r}),~ x^*=\frac{e}{a m-b e}\) and \(y^*=\frac{mrx^*(x^1-x^*)}{ke}\) with \(e=d+E q_2+\eta z\).
Predator free equilibrium point \(E^1\) exists if \(Eq_1<r\) and the interior equilibrium \(E^*\) exists if \(am>be\) and \(r> \frac{kq_1E(am-be)}{k(am-be)-e}\).
Existence and uniqueness of solutions
In this stage, we state and prove following lemma with the help of Li et al. (2010).
Lemma 4.1
Let us assume the following fractional order differential equation of the order of differentiation \(\alpha \in (0,1]\):
where \(f:[t_0,\infty )\times {\mathfrak {D}}\rightarrow {\mathbb {R}}^n, {\mathfrak {D}}\subset {\mathbb {R}}^n\) is a function. If the Lipschitz condition is satisfied by the function f(t, x) with respect to x in \([t_0,\infty )\times {\mathfrak {D}}\), then \(\exists\) a unique solution to the system (4.1) on \([t_0,\infty )\times {\mathfrak {D}}\).
Proof
To prove this lemma, we assume the following region \([t_0,A]\times {\mathfrak {D}}\) where \({\mathfrak {D}}=\{(x,y)\in {\mathbb {R}}^2: \max \{|x|,|y|\}\le B\}\), and A and B be two finite positive real numbers. Assume \({\tilde{x}}=(x,y)\) and \(\tilde{x_1}=(x_1,y_1)\) be two points in \({\mathfrak {D}}\) and define the mapping \(I:{\mathfrak {D}}\rightarrow {\mathbb {R}}^2\) by \(I({\tilde{x}})=(I_1({\tilde{x}}),I_2({\tilde{x}}))\), where
Let \({\tilde{x}}, \tilde{x_1}\in {\mathfrak {D}}\) be arbitrary. Then
Hence the function I(x) satisfies Lipschitz’s condition corresponding to the variable \({\tilde{x}}=(x,y)\in {\mathfrak {D}}\). Therefore by using the Lemma (4.1), we may draw the conclusion that the system (2.5) possesses a unique solution \({\tilde{x}}\in {\mathfrak {D}}\) with respect to initial condition \(\tilde{x_{t_0}}=(x_{t_0} , y_{t_0} )\in {\mathfrak {D}}\). Therefore, using this lemma, we can prove the next theorem:
Theorem 4.2
For every initial point \({\tilde{x}}_{t_0}=(x_{t_0} , y_{t_0} )\in {\mathfrak {D}}\) \(\exists\) a unique solution \(\tilde{x_t}=(x(t) , y(t) )\in {\mathfrak {D}}\) of the model system (2.5) for any time \(t>t_0\).
Nonnegativity and boundedness of solutions
The nonnegative and bounded solutions of a system are the most important and useful solutions in the context of mathematical ecology. Let us assume \({\mathfrak {D}}^+=\{(x,y)\in {\mathfrak {D}}: x,y\in {\mathbb {R}}^+\}\), where \({\mathbb {R}}^+=\{x\in {\mathbb {R}}: x\ge 0\}\).
Theorem 4.3
All the solutions of the model system ( 2.5 ) starting in \({\mathbb {R}}{^+}^2\) are all nonnegative and bounded uniformly.
Proof
(Non-negativity): Assume that \({\tilde{x}}_{t_0}=(x_{t_0} , y_{t_0} )\in {\mathfrak {D}}^+\) be an initial solution of the system(2.5). We prove that any solution \(x(t)\in {\mathbb {R}}^+\) is non-negative. Suppose T be a real number satisfying \(t_0\le t<T\) and
With the help of first equation of the sysytem (2.5), we get \({}_{t_0}D_t^{\alpha }x(t)|_{x(T)}=0\). By the Lemma 3.1, we get \(x(T^+) = 0,\) which is a contradiction to the assumption \(x(T^+) < 0\). Therefore, for every \(t\in [t_0, \infty )\), we get \(x(t)\ge 0\). By the application of the same procedure, for all \(t\in [t_0, \infty )\), we get \(y(t)\ge 0\). \(\square\)
(Uniform boundedness): To prove the uniform boundedness of solutions, let us formulate the following function:
Then, we have
With the help of the Lemma 3.2, we get
Therefore, all solutions of the model system (2.5) starting in the region \({\mathfrak {D}}^+\) are lying in the region \(\Phi =\left\{ (x,y)\in {\mathfrak {D}}^+ :x+\frac{y}{m}\le \frac{k^2(r+e)^2}{4r^2e}+\alpha , ~\alpha >0\right\}\).
Dynamical behavior
The local stability analysis can be done by using the linearization technique around each equilibrium points. The jacobian matrix J of the given system (2.5) at any point (x, y) is followed by
The Jacobian matrix at the trivial equilibrium point \(E^0(0,0)\) is given by: \(J(0,0)=\left( \begin{array}{cc} r-Eq_1 &{} 0 \\ 0 &{} -e \\ \end{array} \right)\)
Hence eigenvalues at \(E^0(0,0)\) of the model (2.5) are \(\lambda _1= r-Eq_1\) and \(\lambda _2=-e\). See that \(|\arg (\lambda _1)|=\pi >\frac{\alpha \pi }{2}\) if \(r-Eq_1<0\) i.e. \(E>r/q_1\), otherwise \(|\arg (\lambda _1)|=0<\frac{\alpha \pi }{2}\), where \(\alpha \in (0,1)\) and \(|\arg (\lambda _2)|=\pi >\frac{\alpha \pi }{2}\), \(\alpha \in (0,1)\). Therefore, by using the Lemma 3.3, we can conclude that the system is asymptotically stable locally around the trivial equilibrium if and only if \(E>r/q_1\). We are in a situation to state next theorem regarding the local asymptotic stability at \(E^0(0,0)\).
Theorem 4.4
\(E^0(0,0)\), the trivial equilibrium point of the system (2.5) is asymptotically stable locally if and only if \(E>r/q_1\).
At the predator-free equilibrium point \(E^1(x^1,0)\), the Jacobian matrix J of the model (2.5) is followed by:
The eigenvalues of the system (2.5) at \(E^1(x^1,0)\) are \(\lambda _1= -(r-Eq_1)\) and \(\lambda _2=\frac{a km (r-Eq_1)}{r+bk(r-Eq_1)}-e\).
Theorem 4.5
\(E^1(x^1,0)\), the predator-free equilibrium point of the system (2.5) is asymptotically stable locally if and only if \(Eq_1<r<Eq_1+\frac{rx^*}{k}\).
Proof
Since \(\alpha \in (0,1)\) notice that \(|\arg (\lambda _1)|=\pi >\frac{\alpha \pi }{2}\) if \(r-Eq_1>0\) i.e. \(r>Eq_1\), otherwise \(|\arg (\lambda _1)|=0<\frac{\alpha \pi }{2}\) and \(|\arg (\lambda _2)|=\pi >\frac{\alpha \pi }{2}\) if \(\frac{a km (r-Eq_1)}{r+bk(r-Eq_1)}-e<0\) i.e. \(r<Eq_1+\frac{rx^*}{k}\) otherwise \(|\arg (\lambda _2)|=0<\frac{\alpha \pi }{2}\), where \(\alpha \in (0,1)\). Therefore, by the Lemma 3.4 the system is asymptotically stable locally at \(E^1(x^1,0)\), the predator-free equilibrium point if and only if \(Eq_1<r<Eq_1+\frac{rx^*}{k}\).
Hence the \(E^1\) is stable whenever \(E^0\) is unstable. Hence, the proof. \(\square\)
Next, our aim is to analyze the local asymptotic stability behavior at \(E^*(x^*,y^*)\), interior equilibrium point. J, the Jacobian matrix of the model (2.5) at \(E^*(x^*,y^*)\) is presented by \(J(x^*,y^*)=\left( \begin{array}{cc} b_{11} &{} b_{12}\\ b_{21} &{} b_{22}\\ \end{array} \right)\), where
The characteristic equation of the matrix \(J(x^*,y^*)\) is \(\lambda ^2-b_{11}\lambda +b_{12}b_{21}=0\). Let \(\lambda _1\) and \(\lambda _2\) be the eigenvalues. Then \(\lambda _1 +\lambda _2=b_{11}\) and \(\lambda _1\lambda _2=b_{12}b_{21}\). Now, \(b_{11}\) will be negative if
The eigenvalues are
The different values of \(\lambda _1\) and \(\lambda _2\) are depending on the coefficients \(b_{11}, b_{12}\) and \(b_{21}\).
-
(i)
If \(b_{11}^2\ge 4b_{12}b_{21}\) and \(b_{11} < 0\), then both the eigenvalues \(\lambda _1\), \(\lambda _2\) are negative. Therefore, \(|\arg (\lambda _{1,2})|=\pi >\frac{\alpha \pi }{2}\), \(\alpha \in (0,1)\) and hence by Lemma 3.3 and 3.4 we can draw the conclusion that \(E^*(x^*,y^*)\) is asymptotically stable.
-
(ii)
If \(b_{11}^2\ge 4b_{12}b_{21}\) and \(b_{11} \ge 0\), then one of the eigenvalues \(\lambda _1\) or \(\lambda _2\) will be nonnegative. Therefore \(|\arg (\lambda _{i})|=0<\frac{\alpha \pi }{2}\) for \(i=1\) or 2, where \(\alpha \in (0,1)\) and hence by Lemma 3.3 and 3.4 , the interior equilibrium is unstable.
-
(iii)
If \(b_{11}^2< 4b_{12}b_{21}\) and \(b_{11} > 0\), then both the eigenvalues \(\lambda _1\) and \(\lambda _2\) will be complex conjugate:
where \(i=\sqrt{-1}\), imaginary unit. Therefore \(|\arg (\lambda _{1,2})|=\tan ^{-1} | \frac{\sqrt{4b_{12}b_{21}-b_{11}^2}}{b_{11}} |\). Then \(E^*\) will be stable asymptotically if \(\tan ^{-1} | \frac{\sqrt{4b_{12}b_{21}-b_{11}^2}}{b_{11}} |>\frac{\alpha \pi }{2}\). In this case we find an interval of differentiation of \(\alpha\) as \(0<\alpha <\frac{2}{\pi }\tan ^{-1} | \frac{\sqrt{4b_{12}b_{21}-b_{11}^2}}{b_{11}}|\) and the interior equilibrium point is asymptotically stable in this interval.
-
(iv)
If \(b_{11}^2< 4b_{12}b_{21}\) and \(b_{11} < 0\), then \(|\arg (\lambda _{1,2})|=\pi -\tan ^{-1} | \frac{\sqrt{4b_{12}b_{21}-b_{11}^2}}{b_{11}} |\). Then \(E^*\) will be stable asymptotically if \(\pi -\tan ^{-1} | \frac{\sqrt{4b_{12}b_{21}-b_{11}^2}}{b_{11}} |>\frac{\alpha \pi }{2}\). The interval of differentiation for \(\alpha\) is \(0<\alpha <2-\frac{2}{\pi }\tan ^{-1} | \frac{\sqrt{4b_{12}b_{21}-b_{11}^2}}{b_{11}}|\), where the interior equilibrium \(E^*\) is asymptotically stable.
-
(v)
If \(b_{11}^2< 4b_{12}b_{21}\) and \(b_{11} = 0\), then \(|\arg (\lambda _{1,2})|=\frac{\pi }{2}>\frac{\alpha \pi }{2}\). Therefore, \(E^*\) is asymptotically stable.
Existence criteria of Hopf Bifurcation
We rewrite our proposed model system (2.5) as
where \(\alpha \in (0,1]\) and \(g(r,{\tilde{x}})=g(x,y)=\left( r x \left( 1-\frac{x}{k}\right) -\frac{axy}{1+bx}-q_1Ex , \frac{maxy}{1+bx}-dy-\eta yz-q_2Ey\right)\), is a function from \([t_0,\infty )\times {\mathfrak {D}}\) to \({\mathbb {R}}^2\) with \({\mathfrak {D}}\subset {\mathbb {R}}^2\) with parameter \(r\in {\mathbb {R}}\). For \(E^*\), the interior equilibrium of the system (4.3), suppose \(\lambda _1(r)\) and \(\lambda _2(r)\) are complex conjugate eigenvalues of Jacobian matrix J of model system (4.3) at \(E^*\) (which exists by the above discussion of case (iii) with \(b_{11}=0\)). The system(4.3) undergoes a Hopf bifurcation for the critical value \(r=r^*\) [by (4.2)] such that following singularity condition[(i)] and transversality condition [(ii)] are satisfied (see Deshpande et al. 2017).
Global Stability of equilibrium points
In this portion, we state only some necessary lemma to check the criterion for the global asymptotic stability at predator-free \(E^1\) and also interior equilibrium point \(E^*\).
Lemma 4.6
( Li et al. 2010) Let \(\psi :{\mathbb {R}}\rightarrow {\mathbb {R}}^+\) be a fractional continuously differentiable function of the order \(\alpha \in (0,1).\)Then the following result hold for any time \(t>t_0\) and \(\sigma \in \mathbb {R^+}:\)
Now, we state and prove the following two theorems in connection with global asymptotic stability criterion for predator-free and interior equilibrium points respectively.
Theorem 4.7
If \(E>\max \left\{ \frac{2r}{q_1},\frac{mak-(d+\eta z)}{q_2}\right\}\), then \(E^1(x^1,0)\), the predator-free equilibrium of the our suggested model system (2.5) is asymptotically stable globally.
Proof
To prove this theorem, we formulate the following positive definite Lyapunov function:
By applying the Lemma 4.6, we get
Since \(q_1E-r<0\) for the existence of \(E^1\), \({}_{t_0}D_t^{\alpha }L(x,y)\le 0\) if \(2r-q_1E<0\) and \(ak-\frac{e}{m}<0\). As \(e=d+\eta z+q_2E\), \({}_{t_0}D_t^{\alpha }L(x,y)\le 0\) if \(E>\max \left\{ \frac{2r}{q_1},\frac{mak-(d+\eta z)}{q_2}\right\}\). Hence the theorem.
Notice that the combined harvesting effort E plays an important role in the global stability of predator-free equilibrium \(E^1\). Theorem 4.7 shows that if the harvesting mortality rate for prey i.e. \(q_1E\) is larger than twice of intrinsic growth rate r of prey population, then \(E^1\) will be asymptotically stable globally. \(\square\)
Theorem 4.8
If \(E<\frac{D_2-\sqrt{D_2^2+4D_1D_3}}{2D_1}\) then \(E^*(x^*,y^*)\), interior equilibrium of the model (2.5) is asymptotically stable globally, where \(D_1, D_2, D_3\) are given in the proof.
Proof
We formulate the following positive definite Lyapunov function to prove the theorem:
where P is a constant determine later. We have the following two equations as \(E^*(x^*,y^*)\) be an equilibrium of the model (2.5),
The Lemma 4.6 implies that
Let us take P such that \(P-1-bx^*=0\) which implies \(P=\frac{am}{am-be}\). Putting the values of P and \(y^*\) in the above equation, we get
Therefore \({}_{t_0}D_t^{\alpha }L(x,y)\le 0\) if \(k-\frac{kEq_1}{r}-\frac{e}{am-be}<0\) which imply \(D_1E^2-D_2E-D_3<0\), where \(D_1=bkq_1q_2\), \(D_2=r(1+bk)q_2+amkq_1-bk(d+\eta z)q_1\) and \(D_3=r(d+\eta z)(1+bk)-amrk\) and if hence \(E<\frac{D_2-\sqrt{D_2^2+4D_1D_3}}{2D_1}\), then \(E^*\) is asymptotically stable globally. This completes the proof. \(\square\)
Incommensurate fractional-order system
In this stage, we analyze the incommensurate fractional-order system (2.4). Here \(\alpha _i\in (0,1]\) for \(i=1,2\) and consider \(\beta =\frac{1}{A}\) where \(A=lcm(q_1,q_2)\) and for \(i=1,2\), \(\alpha _i=\frac{p_i}{q_i}\) with \(p_i\) and \(q_i\) are relatively primes. At the any equilibrium point E(x, y) of the given model is asymptotically stable locally if and only if \(|\arg (\lambda )|>\frac{\beta \pi }{2}\) for all the eigenvalues \(\lambda 's\) of the difference of the matrix \(M=diag(\lambda ^{A\alpha _1},\lambda ^{A\alpha _2})\) and Jacobian matrix \(J =\frac{\partial f}{\partial x}\) calculated at that point E(x, y) (Saka et al. 2019).
Numerical simulations
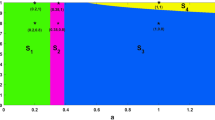
In this section, we check the validity of the analytical results of our formulated model by numerical techniques in MATLAB with help of the algorithm modified predictor-corrector (MPC) method ( Diethelm et al. 2003). We mainly emphasize the effect of the parameters: r, intrinsic growth rate, harvesting effort E, biomass conversion rate of the prey to the predator i.e. m, half saturation constant 1/b and the order \(\alpha\) of fractional differentiation in our model system (2.5) as these are the most important parameters from the view point of ecological sense. \(E^*(x^*,y^*)\), the interior equilibrium point will be asymptotically stable locally if
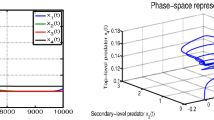
. Now we choose a parameter set \(P_1= \{r, k, a, b, d, q_1, q_2, \eta , m, E, z \}\) as \(\{1.5, 110, 0.56,0.018, 0.04, 0.15, 0.05, 0.5, 0.03, 0.85, 0.25 \}\), then \(\frac{kq_1E(am-be)}{k(am-be)-e}=0.965195\) and \(\frac{q_1Ek^3(am-be)^2}{k(am-be)[(am-ke)+(am-be)k^2]+2ame}=0.960725\). So the intrinsic growth rate r plays a significant role in stability of \(E^*\). When r exceeds 0.96 all the trajectories are pulled towards the interior equilibrium point. As r tends to 0.96 we will see limit cycles are formed around \(E^*\) for a particular order of differentiation \(\alpha\). For another set of parameters, we may also observe stable limit cycles and hence the interior equilibrium loses its stability. For the parameter set \(P_1\) along with \(\alpha =0.85\) and the initial point (9, 7), Fig. 1 verifies that the solution converges to \(E^*=(15.721,2.652)\).

Left: time series plot Right: phase plane plot of (2.5) corresponding to the parameter set \(P_1\) and \(\alpha =0.85\)
Let us choose another set of parameters \(P_2\) as \(P_1\bigcup \{\alpha =0.95\}\), Fig. 2 confirm that solution asymptotically converges to \(E^*=(15.721,2.652)\).

Left: time series plot Right: phase plane plot of (2.5) corresponding to the parameter set \(P_2\)
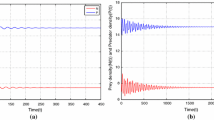
For the parameter set \(P_3=P_1\bigcup \{\alpha =0.99\}\), Fig. 3 show that there are stable limit cycles .

Left: time series plot Right: phase plane plot of (2.5) corresponding to the parameter set \(P_3\)
Keeping all the parameters of \(P_1\) remain same, we change \(r=1.5\) to \(r=0.98\) only i.e. we choose the following parameter set
\(P_4=\{r, k, a, b, d, q_1, q_2, \eta , m, E, z, \alpha \}=\{0.98, 110,0.56, 0.018, 0.04, 0.15, 0.05, 0.5,0.03, 0.85,0.25, 0.99\}\). Fig. 4 verifies that there exist a limit cycle of system (2.5) around \(E^*\), interior equilibrium point.

Left: time series plot Right: phase plane plot of (2.5) corresponding to the parameter set \(P_4\)
Again we change only the parameter \(r=0.98\) to \(r=3.85\) and let \(P_5=\{r, k, a, b, d, q_1, q_2, \eta , m, E, z \}=\{3.85, 110, 0.56, 0.018, 0.04, 0.15,0.05,0.5,0.03,0.85,0.25 \}\). Fig. 5 depicts that solution of the model system (2.5) converges asymptotically to interior equilibrium \(E^*=(15.88,7.271)\) for the parameter set \(P_5\) with \(\alpha =0.9\).

Left: time series plot Right: phase plane plot of (2.5) corresponding to the parameter set \(P_5\) with \(\alpha =0.9\)
Let us choose \(P_6\) as \(P_5\bigcup \{\alpha =0.91,\alpha =0.93\}\) and \(P_{7}=P_7\bigcup \{\alpha =0.97\}\). The parameter set \(P_6\) confirms that the solutions asymptotically converges to the \(E^*=(15.88,7.271)\) (Fig. 6).

Left: time series plot for prey Middle: time series plot for predator Right: phase plane plot of (2.5) corresponding to the parameter set \(P_6\)
The parameter set \(P_7\) shows that there is a stable limit cycle which is given in Fig. 7.

Left: time series plot for prey Middle: time series plot for predator Right: phase plane plot of (2.5) corresponding to the parameter set \(P_{7}\)
Let us vary the parameters \(r=0.98\) to \(r=3.85\) and \(E=0.85\) to \(E=1\) and consider \(P_8=\{r, k, a, b, d, q_1, q_2, \eta , m, E, z,\alpha \}=\{1.85, 110, 0.56, 0.018, 0.04, 0.15,0.05,0.5,0.03, 1, 0.25,0.99 \}\). For the parameter set \(P_8\), Fig.8 confirm that there are stable limit cycles.

Left: time series plot for prey Middle: time series plot for predator Right: phase plane plot of (2.5) corresponding to the parameter set \(P_{8}\) with the initial conditions (9,7) and (25,3.5)
Let us choose \(P_{9}\) as \(P_9=\{r, k, a, b, d, q_1, q_2, \eta , E, z,\alpha \}\bigcup \{m\}=\) \(\{1.85, 110,0.56, 0.018,0.04,0.15, 0.05,0.5,0.85,0.25,0.95\}\bigcup \{00,0.01,0.02,0.03\}\). Fig. 9 depicts for the parameter set\(P_{9}\).

Left: time series plot for prey Middle: time series plot for predator Right: phase plane plot of (2.5) corresponding to the parameter set \(P_{9}\)
Again consider \(P_{10}\) as \(P_{10}=\{r, k, a, b, d, q_1, q_2, \eta , m, E, z \}\bigcup \{\alpha \}=\) \(\{1.85,110, 0.56,0.018,0.04,0.15,0.05,0.5,0.03,0.85,0.25 \}\bigcup \{0.85,0.9,0.95,0.99\}\). Fig.10 depicts for the parameter set \(P_{10}\).

Left: time series plot for prey Middle: time series plot for predator Right: phase plane plot of (2.5) corresponding to the parameter set \(P_{10}\)
Let us assume \(P_{11}\) as \(P_{11}=\{r, k, a, d, q_1, q_2, \eta , m, E, z,\alpha \}\bigcup \{b\}= \{1.85, 110,0.56,0.04,0.15, 0.05, 0.5,0.03, 0.85, 0.25,0.95 \} \bigcup \{0.01,0.02,0.03,0.04\}\). We solve the model (2.5) with the help of the parameter set \(P_{11}\). The Fig.11 presents these solutions.

Left: time series plot for prey Middle: time series plot for predator Right: phase plane plot of (2.5) corresponding to the parameter set \(P_{11}\)
Lastly, choose the parameter set \(P_{12}\) as \(P_{12}=\{r, k, a, b, d, q_1, q_2, \eta , m, E, z,\alpha \}\bigcup \{E\}= \{1.85, 110, 0.56, 0.018,0.04, 0.15,0.05, \eta =0.5, 0.03, 0.25,0.95 \} \bigcup \{0.9,1.4,1.9,2.4,2.8,3.5)\}\). Fig. 12 depicts for the parameter set \(P_{12}\).

Left: time series plot for prey Middle: time series plot for predator Right: phase plane plot of (2.5) corresponding to the parameter set \(P_{12}\)
For the incommensurate fractional-order system (2.4), first we use the parameter set \(P_1\) and consider \(\alpha _1=0.8\), \(\alpha _2=0.9\) and then \(\frac{\beta \pi }{2}=0.1570<\min |arg(\lambda )|=0.3396\). Hence the system (2.4) is asymptotically stable. Fig. 13 verifies this. Now we consider the parameter set \(P_1\) and take \(\alpha _1=0.97\), \(\alpha _2=0.98\) and then \(\frac{\beta \pi }{2}=0.01570>\min |arg(\lambda )|=0.012548\). Hence the system (2.4) is not stable. Fig. 14 asserts this.

Left: time series plot Right: phase plane plot of (2.4) corresponding to the parameter set \(P_{1}\) with \(\alpha _1=0.8\) and \(\alpha _2=0.9\)

Left: time series plot Right: phase plane plot of (2.4) corresponding to the parameter set \(P_{1}\) with \(\alpha _1=0.97\) and \(\alpha _2=0.98\)
Conclusion and discussion
In our present paper, we have formulated and examined a fractional order model for the interactions of prey and predator populations in the presence of harvesting and also the Holling type-II functional response. Harvesting of combined prey and predators make our model more realistic. The fractional-order system is more realistic and it causes more impacts than the ordinary system or integer-order system of differential equations. The quality of many real problems (or systems) ensures that they possibly more exactly modeled with a fractional-order system of differential equations, for example, the anomalous diffusion equation is modeled with it. A higher-order system can be also modeled to a lower order model by using fractional-order which is one of the key advantages of the fractional calculus. In the case of control theory, the model system by fractional-order differential equations produces a much better effect than the ordinary or integer-order system of differential equations.
We resolve the problem of time dimension of the commensurate model system (2.3). Also, we rebuilt the system to the commensurate system (2.5) and incommensurate system (2.4). Again, we observed that the time dimension is not an issue for the stability of several equilibria. Next, we derived the conditions for the existence and uniqueness of various equilibria of our system in several fractional-order cases. Then we tested the conditions for non-negativity of solutions and also uniform boundedness of that solutions. Furthermore, we established some criterion to verify the asymptotic stability globally of predator free \(E^1\) and the interior \(E^*\) equilibrium point of our model (2.5) by formulating desirable Lyapunov functions. The theoretical results are asserting by some numerical simulations. Our numerical works also demonstrate the influence of intrinsic growth rate r of prey, harvesting effort E, biomass conversion rate m, half saturation constant 1/b and the fixed order \(\alpha\) or various orders \(\alpha _1\), \(\alpha _2\) of fractional differentiation on each population density (biomass).
From the numerical simulations we observed that it is possible to control the populations of prey and also predator by controlling the following parameters: r, intrinsic growth rate (Figs. 1, 2, 3, 4), biomass conversion rate m (Fig. 9), half saturation constant 1/b (Fig. 11) and harvesting effort E (Fig. 12).
In these numerical simulations, we have applied the Predictor-Corrector \(P(EC)^mE\) (Predict, multi-term(Evaluate, Correct), Evaluate) method ( Diethelm et al. 2002, 2003; Garrappa 2010) with the help of MATLAB software. Here we use the solver function as implicit fractional linear multistep methods (FLMMs) for the fractional order differential equations and we have described the corresponding phase portrait of our model system with the help of the solutions by the solver. Notice that \(P(EC)^mE\) is a modified iteration formula of the method PECE (Predict, Evaluate, Correct, Evaluate) and the Adams-Moulton algorithm. Several numerical techniques for the fractional-order systems are a extremely progressive. Various numerical methods like the Taylor series approximations method, Homotopy perturbation method, Diethelma’s method, and Adomian decomposition method, etc. are widely applied method in connections with numerical computations of a fractional order system. In our future works, we will study several fractional-order systems with the help of various numerical methods to obtain more effective results.
References
Agmour I, Bentounsi M, Baba N (2020) Impact of wind speed on fishing effort. Model Earth Syst Environ 6:1007–1015
Arditi R, Ginzburg L (2012) How species interact: altering the standard view on trophic ecology. Oxford University Press, USA
Berryman AA (1992) The origins and evolutions of predator-prey theory. Ecology 73:1530–15355
Chakraborty S, Jana S, Kar TK (2012a) Global dynamics and bifurcation in a stage structured prey–predator fishery model with harvesting. Appl Math Comput 218:9271–9290
Chakraborty K, Das K, Kar TK (2012b) Effort dynamics of a delay-induced prey-predator system with reserve. Nonlinear Dyn 70:1805–1829
Clark CW (1979) Aggregation and fishery dynamics: a theoretical study of schooling and the purse seine tuna fisheries. Fish Bull 77:317–337
Das T, Mukherjee RN, Chaudhari KS (2009) Bioeconomic harvesting of a prey-predator fishery. J Biol Dyn 3:447–462
Delavari H, Baleanu D, Sadati J (2012) Stability analysis of Caputo fractional-order non linear system revisited. Non linear Dyn 67:2433–2439
Deshpande AS, Daftardar-Gejji V, Sukale YV (2017) On Hopf bifurcation in fractional dynamical systems. Chaos Solitons Fractals 98:189–198
Diethelm K (2003) Efficient solution of multi-term fractional differential equations using P(EC)mE methods. Computing 71:305–319
Diethelm K, Ford NJ, Freed AD (2002) A predictor-corrector approach for the numerical solution of fractional differential equations. Nonlinear Dyn 29:3–22
El Foutayeni Y, Bentounsi M, Imane AI (2020) Achtaich N Bioeconomic model of zooplankton-phytoplankton in the central area of Morocco. Model Earth Syst Environ 6:461–469
El-Saka HAA, Lee S, Jang B (2019) Dynamic analysis of fractional-order predator-prey biological economic system with Holling type II functional response. Nonlinear Dyn 96:407–416
Fussmann GF, Weithoff G, Yoshida T (2005) A direct experimental test of resource vs. consumer dependence. Ecology 86(11):2924–2930
Garrappa R (2010) On linear stability of predictor-corrector algorithms for fractional differential equations. Int J Comput Math 87:2281–2290
Guo Y (2014) The stability of solutions for a fractional predator-prey system. Abstract Appl Anal 5:5. https://doi.org/10.1155/2014/124145 Article ID 124145
Hilfer R (2000) Applications of fractional calculus in physics. World Scientific Publishing Co., New Jersey
Holling CS (1959) Some characteristics of simple types of predation and parasitism. Can Entomol 91:385–398
Huang JC, Gong YJ, Ruan SG (2013) Bifurcation analysis in a predator-prey model with constant-yield predator harvesting. Discrete Contin Dyn Syst Ser B 18(8):2101–2121
Israel T, Mouofo PT, Mendy A, Lam M, Tewa JJ, Bowong S (2015) Local bifurcations and optimal theory in a delayed predator-prey model with threshold prey harvesting. Int J Bifurc Chaos 25(07):1540015
Jana S, Guria S, Das U, Kar TK, Ghorai A (2015) Effect of harvesting and infection on predator in a prey-predator system. Nonlinear Dyn 81:917–930
Jensen CXJ, Ginzburg LR (2005) Paradoxes or theoretical failures? The jury is still out. Ecol Model 188:3–14
Kar TK, Jana S (2012) Stability and bifurcation analysis of a stage structured predator prey model with time delay. Appl Math Comput 219:3779–3792
Khatua A, Jana S, Kar TK (2020) A fuzzy rule-based model to assess the effects of global warming, pollution and harvesting on the production of Hilsa fishes. Ecol Inform 57:101070
Kilbas A, Srivastava H, Trujillo J (2006) Theory and application of fractional differential equations. Elsevier, New York
Kumar V, Dhar J, Bhatti HS (2018) Stability and Hopf bifurcation dynamics of a food chain system: plant-pest-natural enemy with dual gestation delay as a biological control strategy. Model Earth Syst Environ 4:881–889
Leard B, Lewis C, Rebaza J (2008) Dynamics of ratio-dependent predator-prey models with non-constant harvesting. Discret Contin Dyn Syst Ser 1(2):303–315
Lenzini P, Rebaza J (2010) Non-constant predator harvesting on ratio-dependent predator-prey models. Appl Math Sci 4(16):791–803
Li Y, Chen Y, Podlubny I (2010) Stability of fractional-order nonlinear dynamic systems: lyapunov direct method and generalized Mittag-Leffler stability. Comput Math Appl 59:1810–1821
Li H, Jing Z, Yan CH, Li J, Zhidong T (2016) Dynamical analysis of a fractional-order predator-prey model incorporating a prey refuge. J Appl Math Comput 54:435–449
Liang S, Wu R, Chen L (2015) Laplace transform of fractional-order differential equations. Electron J Differ Equ 139:1–15
Mbava W, Mugisha JYT, Gonsalves JW (2016) Prey, predator and super-predator model with disease in the super-predator. Appl Math Comput 000:1–23
Mesterton-Gibbons M (1996) A technique for finding optimal two-species harvesting policies. Nat Resour Model 92:235–244
Miller KS, Ross B (1993) An introduction to the fractional calculus and fractional differential equations. John Wiley and Sons Inc., New York
Misra OP, Raveendra Babu A (2016) Modelling effect of toxicant in a three-species food-chain system incorporating delay in toxicant uptake process by prey. Model Earth Syst Environ 2:77
Odibat Z, Shawagfeh N (2007) Generalized Taylors formula. Appl Math Comput 186:286–293
Omar AA (2019) Application of residual power series method for the solution of time-fractional Schrödinger equations in one-dimensional space. Fundam Inform 166(2):87–110
Omar AA (2019) Numerical algorithm for the solutions of fractional order systems of Dirichlet function types with comparative analysis. Fundam Inform 166(2):111–137
Omar AA, Maayah B (2019) Fitted fractional reproducing kernel algorithm for the numerical solutions of ABC-Fractional Volterra integro-differential equations. Chaos Solitons Fractals 126:394–402
Petras I (2011) Fractional-order nonlinear systems: modeling anlysis and simulation. Higher Education Press, Beijing
Podlubny I (1999) Fractional differential equations. Academic Press, San Diego
Rosenzweig ML (1971) Paradox of enrichment: destabilization of exploitation ecosystems in ecological time. Science 171:385–387
Sahoo B, Poria S (2016) Effects of additional food in a susceptible-exposed-infected prey-predator model. Model Earth Syst Environ 2:160
Shaikh AA, Das H, Ali N (2018) Study of a predator-prey model with modified Leslie-Gower and Holling type III schemes. Model Earth Syst Environ 4:527–533
Thakur NK, Ojha A (2020) Complex plankton dynamics induced by adaptation and defense. Model Earth Syst Environ 6:907–916
Acknowledgements
Research of T. K. Kar is supported by the Council of Scientific and Industrial Research(CSIR), India (File No. 25(300)/19/EMR-II, dated: 16th May, 2019). Moreover, the authors are very much thankful to the anonymous reviewers and Dr. Md. Nazrul Islam, the editor in chief of the journal, for their constructive comments and helpful suggestions to improve both the quality and presentation of the manuscript significantly.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Mandal, M., Jana, S., Nandi, S.K. et al. Modeling and analysis of a fractional-order prey-predator system incorporating harvesting. Model. Earth Syst. Environ. 7, 1159–1176 (2021). https://doi.org/10.1007/s40808-020-00970-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40808-020-00970-z