
Abstract
Tons river basin has a great significance to states Madhya Pradesh and Uttar Pradesh in India, concerning water resources aspects and the ecological balances. A hydrological modeling approach was used to identify the sensitive hydrological parameters of the basin through Sequential Uncertainty Fitting (SUFI-2) technique. SUFI-2 was used for the calibration of SOIL WATER ASSESSMENT TOOL (SWAT) model. It was calibrated for period (1979–2000) including 3 years as warm up (1979–1982), subsequently model was validated on 11 years of datasets (2001–2011). The percentage of observation covered by the 95PPU (p-factor) and the average thickness of the 95PPU band divided by the standard deviation of the measured data (r-factor), were taken into an account for performance evaluation of model. In calibration and validation the p-factor and the r-factor was obtained as 0.54, 0.76 and 0.68, 0.56 respectively. The coefficient of determination (R2), Nash–Sutcliffe efficiency (NSE), percent bias (PBIAS) and RMSE-observations standard deviation ratio (RSR) have been used for goodness of fit between observation and final best simulation. The R2, NSE, PBIAS and RSR are 0.74, 0.73, −3.55 and 0.54 respectively during the calibration whereas in validation period values are 0.75, 0.69, 18.55 and 0.56 respectively.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Hydrologic cycle has a close relation with the earth surface and subsurface processes by its integration through its cycle, storage, and agricultural pattern. Hence to identify environmental problems in terms of land use/land cover changes, soil degradation, climate changes and its impacts on the ecosystem services, it needs the study of runoff above and below the earth surface using scientific methods and approaches. The Hydrologic and water quality models (H/WQ) are being used in the impact based analysis on water resources and its ecosystem services (Moriasi et al. 2012) and for assessing the influence of topography, land use and climate change on water resources using a distributed hydrological model is an effective tool (Patel and Srivastava 2013). The H/WQ models can simulate the hydrological component, sediment transport and chemical yield. SOIL WATER ASSESSMENT TOOL (SWAT) is a physical process based and distributed river basin model with spatial distributed parameters operating on a daily time step and it is widely accepted as robust interdisciplinary watershed-modeling tools (Gassman et al. 2007). Arnold and Fohrer (2005) have shown that SWAT can be used in assessment based analysis like predicting long term impacts of land management measure on water, sediment and agricultural yield (nutrient loss) in large complex watershed with varying soils, land and management conditions. Borah and Bera (2004) compared SWAT with Dynamic Watershed Simulation Model (DWSM), Hydrologic Simulation Program-Fortran (HSPF) model (Bicknell et al. 1997), and concluded that SWAT is useful in an agricultural watershed for monthly predictions except for extreme storm events and hydrologic conditions. A comparison was made between SWAT and HSPF for streamflow predictions and it was found that SWAT was more consistent in estimating streamflow for different climatic conditions and for investigating the long-term impacts of climate variability (Van Liew et al. 2003). Discharge prediction using SWAT model has been done in most of the country in world (Spruill et al. 2000; Zhang et al. 2010). Schuol et al. (2008a) used SWAT for modeling blue and green water availability in Africa and freshwater availability (Schuol et al. 2008b) in the West African sub-continent using the SWAT model. In recent years the uncertainty of model is now subjected to considerable area of research and reason behind it is that large uncertainties related to the distributed hydrological model (Abbaspour et al. 2007). Calibration is the process of adjusting input parameter values and their boundary conditions to match the simulated values with the observed values (Zeckoski et al. 2015).Various hydrological models predicts some degree of uncertainty in outputs so they require calibration of the output in order to reduce the uncertainty in the predictions (Engel et al. 2007). A hydrological model needs to be calibrated by observed hydrologic variables because of poor quality of input data and due to environmental processes held in conceptual simplification (Wagener et al. 2004; Gupta et al. 2008). Calibration requires the examination of the accuracy of output and process simulation (Sorooshian 1983) and through sensitivity (SA) and uncertainty analysis (UA) the model calibration can be evaluated (Zheng and Keller 2007). Uncertainty may be associated with input, model structure, parameter, and output, so the model predictions should be in a confidence range (Beven 2000; Van Griensven et al. 2008). Hence the SA and UA are used to reduce the uncertainties (Gupta et al. 2006; Wagener and Gupta 2005). Various types and sources of uncertainties coming in hydrologic outputs are well explained by Yang et al. (2008). For checking the applicability of SWAT model in hydrological investigation a careful calibration and validation is required using different algorithms (Duan et al. 1992; Vrugt et al. 2003). A calibrated model need performance measures (PMs) and its evaluation criteria (PEC). The PMs are the statistical and graphical methods which include the threshold value and PEC define the qualitative ratings of model performance (very good, good, satisfactory etc.) with corresponding quantitative threshold for the PMs (Moriasi et al. 2015). In the validation there is no need of further adjustment of calibrated parameters and it shows that model can run for the future condition (Zheng et al. 2012). Generalized Likelihood Uncertainty Estimation (GLUE) (Beven and Binley 1992), Sequential Uncertainty Fitting (SUFI-2) (Abbaspour et al. 2004, 2007), Parameter solutions (ParaSol) (Van Griensven and Meixner 2006) and Markov Chain Monte Carlo (MCMC) (Kuczera and Parent 1998) are four algorithms used for assessing the uncertainty in SWAT predictions and is compared by Yang et al. (2008). SWAT-CUP (Abbaspour et al. 2007) link all the algorithms (GLUE, Parasol, SUFI-2 and MCMC) to SWAT model and enable SA and UA of model parameters as well as structure (Rostamian et al. 2008). Setegn et al. (2009) used SUFI-2, GLUE and ParaSol to assess the performance and applicability of SWAT model for prediction of streamflow in the Lake Tana Basin. Zhang et al. (2009) used Genetic algorithms (GA) and Bayesian model averaging (BMA) for calibration and uncertainty analysis using SWAT for the southeastern USA and central China. Rostamian et al. (2008) performed model calibration and uncertainty analysis with SUFI-2 for estimating runoff and sediment in two mountainous basins in central Iran. SUFI-2 algorithm includes both graphical and statistical PMs for robust model performance. Yang et al. (2008) applied the SUFI-2 for evaluation of SWAT model and reported that SUFI-2 needs a minimum number of model simulations to attain a high-quality calibration and uncertainty analysis. The overall objective of the work was to calibrate and validate the SWAT model using SUFI-2 technique. The study area having undulating topography under the great influence of the land use/land cover and climate changes on the surface and sub surface hydrology.
Description of the study area
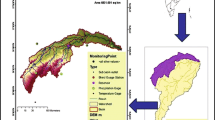
Tons River Basin (TRB) is flowing in Uttar Pradesh and Madhya Pradesh states of India. TRB is a sub-basin of Ganga River Basin originated at Tamakund in the Kaimur Range at an elevation of 610 meters flowing Satna and Rewa and joins the Ganges at Sirsa, about 311 km downstream of the confluence of the Ganges and Yamuna. The geographical extent of the TRB lies between 80°18′–83°20′E longitudes and 23°58′–25°17′N latitudes (Fig. 1). It is an agricultural dominated watershed and total drainage area is approximately more than 17,000 km2 out of which 11,974 km2 lies in MP and the remaining area 5,643 km2 lies in UP. Total land put to use for agriculture purpose in Tons basin is 8460 km² in the state for which 2244 hm of water is available for its use against total available water at 75% dependability is 2244 hm. The flowing direction of river is almost northerly in this area. Some tributaries of the Tons like Belan, Mahana, Beehar, Simrawal, Karihari and Nar are the perennial river and also principle sources of water in the river in which it meets the Belan River in Uttar Pradesh. There are some other intermittent streams which remains almost dry during most of the year but become an effective catchment in the rainy season. Since flow directions of the rivers are guided by joint of the underlying rocks so most of the rivers are consequent type. The major soil groups are sandy_clay_loam, sandy_loam, and clay while major land use/land cover classes are water body, mixed crop, barren land, residential and forest. Major crops in this area are wheat, soya bean, gram, paddy, rice, jowar, cotton, and sunflower. Annual precipitation varies from 930 to 1116 mm/year in which June–September occupy 90% of the total rainfall while July and August are months of maximum rainy days. Maximum temperature in April and May ranges from 36 to 41 °C, whereas the minimum temperature occurs during the months of December and January ranging from 8 to 12 °C.

Location map of Tons River Basin
Materials and methods
Input datasets
Digital elevation model (DEM), land use/land cover (LULC), soil, weather and gauge (discharge) are the main datasets collected from different sources/agencies and prepared. The details of all the datasets used in this study are listed in Table 1.
Digital elevation model (DEM)
The SRTM digital elevation data has been processed to fill data voids. The SRTM 90 m DEM’s has a resolution of 90 m at the equator. These are available in both ArcInfo ASCII and GeoTiff format to facilitate their ease of use in a variety of image processing and GIS applications. Here DEM has been used as an input in SWAT model for delineating watershed and for topographic parameterization of TRB watershed. The TRB has 29 sub-basins and 134 hydrological response units (HRU) with threshold of 1500 hectares. The HRUs of the catchment were categorized into different classes mainly on the basis of landuse, soil and slope.
Land use/land cover
LULC data set of the study area was prepared using Landsat satellite image (Landsat 8) by unsupervised classification and ISODATA technique. A brief description of LULC types and descriptions of each class are given in Table 2. The mixed crop was most dominant class (58.46%) in the study area. Accuracy assessment has been performed to check the results which represent the each LULC category with their classification accuracy. The overall classification accuracy was 96.81% while overall kappa statistics was 0.9481. The LULC has forest mixed, barren land, forest deciduous, shrubland, mixed crop, residential, residential low density (LD) and water body (Fig. 2).

Land use/land cover map of Tons River Basin
Soil data
Soil map has six major soil classes, presented in Table 3. The major SWAT soil classes are (Be80-2a-3681), (Lc5-1a-3772), (Lc75-1b-3780), (Lf10-1bc-3785), (Lo51-2a-3812), (Vc21-3a-3859). The most dominant soil class is (Lc75-1b-3780) (Fig. 3). Manually soil attributes were added into the SWAT user soil database.

Soil map of Tons River Basin
SWAT model structure
SWAT delineate the watershed into number of sub basins which are joined by a stream network and further divides each sub basins into hydrologic response units (HRUs), with unique combinations of land cover, slope, and soil type (Patel and Srivastava 2013). The readers can found more details of SWAT model (http://swat.tamu.edu/documentation/). The model is based on principle of water balance Eq. (1):
SWt = Final soil water content (mm), SW0 = Initial soil water content on day i (mm), Rday = Amount of precipitation on day i (mm), Qsurf = Amount of surface runoff on day i (mm), Ea = Amount of evapotranspiration on day i (mm), Qgw = Amount of return flow on day i (mm). Wseep = Amount of water entering the vadose zone from the soil profile on day i (mm).
SUFI-2 algorithm
In SUFI-2, parameter uncertainty accounts for all sources of uncertainties such as uncertainty in driving variables, conceptual model, parameters, and measured data (Abbaspour 2015). The 95PPU is calculated at the 2.5% and 97.5% levels of the cumulative distribution of an output variable obtained through Latin hypercube sampling disallowing 5% of the very bad simulations (Abbaspour et al. 2007; McKay 1988). The strength of model calibration and uncertainty is determined by the r-factor and p-factor (Abbaspour et al. 2015; Arnold et al. 2012). Further, the degree to which all uncertainties are accounted is quantified by p-factor and its value varies from 0 to 1. The p-factor shows the percentage of measured data covered in 95% range of uncertainty (95PPU) and accounted all the uncertainties associated with the SWAT (Singh et al. 2013). The p-factor value 1 means the highest value, that is, 100% bracketing of the measured data and low value represents high uncertainties in the output (Setegn et al. 2009). The r-factor (Yang et al. 2008) (average thickness of the 95ppu band divided by the standard deviation of the measured data) describes the quality of the calibration and if its value be near zero then coincides with the measured data. The low value of r-factor is reported to be desirable for less uncertainty (Abbaspour et al. 2004, 2009) and approaching to 1 shows high uncertainty. It needs a balance between the two (p and r-factor) because larger p-factor can be achieved only at higher r-factor. When acceptable values of r and p-factors are reached, then the parameter uncertainties are in the calibrated parameter ranges. SUFI-2 allows usage of different objective functions such as Coefficient of Determination (R2) (Krause et al. 2005), NSE (Nash–Sutcliff efficiency) (Nash and Sutcliffe 1970). Readers can found detailed information of SUFI-2 (in indicative literature: Abbaspour et al. 2004; Yang et al. 2008).
Performance indices
The p-factor, r-factor, R2, NSE and PBIAS are five parameters that are used to evaluate the performance of model results. NSE is a normalized dimensionless statistic that determines the relative magnitude of the residual variance compared to the measured data variance (Nash and Sutcliffe 1970) and its value varies from −∞ to 1, with a high value indicating an accurate model.
NSE is calculated using the following define by equations no. 2:
where, Qm is mean of observed discharges, and Qs is simulated discharge and n is the total number of observations.
The degree of collinearity between simulated and measured streamflow can be obtained using the coefficient of determination (R2) and the range of R2 is from 0 to 1, with a higher value meaning better performance. It can be calculated as following (Eq. 3):
PBIAS (Percent bias) measures the average tendency of the simulated data to be larger or smaller than observed counterparts (Gupta et al. 1999). PBIAS values with small magnitude are preferred. It can be calculated as following (Eq. 4):
where, Q is a variable (e.g. discharge), and m and s stand for measured and simulated, respectively. The optimum value of PBIAS is zero, where low magnitude values indicate better simulations. Positive values indicate model underestimation and negative values indicate model over estimation (Gupta et al. 1999).
RMSE-observations standard deviation ratio (RSR) is the ratio of the root mean square error (RMSE) and standard deviation of measured data. RSR varies from the optimal value of 0 to ∞ (Moriasi et al. 2015), where zero indicates zero RMSE or residual variation and therefore perfect model simulation, to a large positive value. The lower RSR shows the lower the RMSE and the better the model simulation performance (Moriasi et al. 2007). It can be calculated as following (Eq. 5):
Results
Sensitivity analysis (SA)
In the early stage of calibration global SA (Abbaspour et al. 2007) for 19 parameters (CN2, ALPHA_BF, GWQMN, ESCO, CH_K2, CH_N2, REVAPMN, SOL_AWC, HRU_SLP, SOL_K, SOL_BD, SLSUBBSN, GW_REVAP, EPCO, GW_DELAY, SFTMP, ALPHA_BNK, SURLAG and OV_N) was conducted at the monthly time-step using Latin hypercube sampling (McKay et al. 1979; Helton et al. 2003). The first step in calibration process is to adjust the input parameter values for closely matching the simulated results with the observed variables (Zeckoski et al. 2015) and to find out the most sensitive parameters affecting more a watershed or subwatershed than other parameter. So SA is to determine the change in model output with respect to changes in model inputs following the SWAT-CUP documentation (Neitsch et al. 2005; Arnold et al. 2012). SA was performed with 1000 times run and the results were examined. A t-stat and p-value (Abbaspour 2015) is used to measure the sensitivity and relative significance of each parameter. The parameters which have larger value of t-stat and smaller value of p are most sensitive parameters. The most sensitive parameter here is ALPHA_BF followed by SOL_K, SFTMP, and SLSUBBSN.hru. Ranges of parameter space were once again adjusted and ready for the next calibration and UA. The input parameters included along maximum and minimum value, fitted value, t-stat and p-values, rank of sensitivity and description are listed in Table 4.
Where the variation method used in Table 4 is as can be explained:
r = means the existing parameter value is multiplied by (1 + a given value).
v = means the existing parameter value is to be replaced by the given value, and
a = means the given value is added to the existing parameter value.
Calibration and uncertainty analysis (UA)
Calibration and UA (Arnold 2001; Abbaspour et al. 2004, 2005) is an effort to better parameterize a model for a given set of local conditions, thereby minimize the prediction uncertainty. Model calibration is performed by carefully selecting values of model input parameters (within their respective uncertainty ranges). The simulated and observed discharge was compared at Meja gauge station (outlet) during calibration period 1982–2000. The performance indices (Moriasi et al. 2015) during the calibration period such as are listed in Table 5. Dotty plot (Fig. 4) is the plot of parameters versus objective function; indicating distribution of the sampling points which explain the parameter sensitivity (Abbaspour 2015). It has depicted the result of model run with NSE as an objective function during calibration. In this study the min value of objective function (threshold for the behavioral solutions) is 0.5.

Dotty plots with objective function of NS coefficient against each aggregate SWAT parameter
The r-factor is 0.76 whereas p-factor (0.54) was obtained during calibration respectively. Figure 5 described the observed and simulated pattern with the high and low peak of precipitation during calibration period. The strength of calibration/UA as explained by r-factor (95ppu band) is shown in Fig. 6 by shaded region. Moriasi et al. (2007) recommended the general performance of objective functions on monthly time step calibration are satisfactory as if NSE > 0.50 and RSR ≤ 0.70, and if PBIAS ± 25% for streamflow, PBIAS ± 55% for sediment, and PBIAS ± 70% for N and P. Van Liew et al. (2003) shows the value of R2 should be greater than 0.5. Nash and Sutcliffe (1970) described as NSE value greater than 0.75 (good simulation) and for satisfactory (greater than 0.36). The NSE and R2 values were observed as 0.73 and 0.74, respectively. The PBIAS value is −3.55 while the RSR is 0.52 during calibration of model which indicate good model performance result (Moriasi et al. 2007). The scatter plot (Fig. 7) shows relationship between observed and simulated variables with good correlation (0.743).

Observed and simulated discharge and precipitation during calibration

95ppu plot and observed streamflow during calibration

Scatter plot of the observed vs. simulated flow (calibration)
Model validation
A calibrated model can be shown capable by its validation using same parameters used in calibration (Zheng et al. 2012). Model validation was performed using same algorithm as in calibration with 1000 times run for a period of 11 years (2001–2011). In validation year of 2000, 2001 and 2006 were a fairly wet year, with a total annual average rainfall greater than 600 mm. This also resulted in a high flow out at the basin outlet. Graphically, the model reproduces well the monthly flows (Figs. 8, 9). The model performance for the validation period is presented in Table 6. The value of r-factor (0.56) and p-factor (0.68) was obtained in validation process. The PBIAS value is 18.55 while the RSR is 0.56 during validation of model. The scatter plot (Fig. 10) of observed versus simulated showing R² (0.749) which is almost showing same R2 as in 95PPU during validation.

Observed and simulated discharge, precipitation during validation

95ppu plot and observed streamflow during validation

Scatter plot of observed vs. simulated flow (validation)
Discussion
The main objective of the work was to calibrate and validate the SWAT model in an agricultural dominated watershed. The efficiency of model can be evaluated through SA, model calibration and validation. SA depends on the choice of parameters used which represents the details of the parameters being applied for SA in the early stage of calibration in SWAT-CUP using the default lower and upper limits. There are global sensitivity method (allowing all the parameters values to change) and one-at-a-time method (changing values one at a time). Since One-at-a-time method checks a single parameter so information about other constant parameters are unknown (Abbaspour et al. 2007). To avoid this global SA method was performed. Arnold et al. (2012) categorize the parameters by process as for surface runoff, baseflow, sediment and for nutrient and pesticide using the report of input parameters in SWAT model calibration for 64 selected watershed studies. CN2, AWC, ESCO, EPCO, SURLAG, OV_N are the parameters for the surface runoff while GW_ALPHA, GW_REVAP, GW_DELAP, GW_QWN, REVAPMN, RCHARG_DP are for the sediment calibration. Yusuf et al. (2016) calibrate the SWAT for the streamflow prediction in a tropical watershed and find the CN2 followed by AWC and ESCO are the most sensitive parameters among the sixteen parameters. Narsimlu et al. (2015) performed the global SA and found the ALPHA_BNK, ESCO followed by CH_K2 and CN2 as most sensitive parameters in a tropical agricultural watershed. Singh et al. (2013) calibrated SWAT for Tungabhadra River and found CH_K2, SOL_K, CN2, ALPHA_BF, ALPHA_BNK as most sensitive parameters. Mengistu et al. (2012) indicated the CN2 as a the most sensitivity parameter in addition Sol-AWC, ESCO, Sol-K in Eastern Nile River basin and concluded due to the fact that the curve number depends on several factors including soil types, soil textures, soil permeability and land use properties. In our study area among 19 sensitive parameters the SA shows that the parameters as ALPHA_BF, SOL_K, SFTMP, SLSUBBSN, and SOL_AWC are the most sensitive parameters and are in decreasing order of sensitivity rank. A limitation with SWAT is that it cannot rigorously simulate groundwater flow (Rostamian et al. 2008) and groundwater recharge is important in these regions and therefore the parameter ALPHA_BF (base flow factor) is the most sensitive parameters in this area. Since baseflow is not better simulated, the p and r-factor are not in desired limit (larger p and smaller r-factor) for a good calibration result. The parameters like baseflow and other related to groundwater-river interaction also influence the flow process. This can also be check by the calibration results showing a large number of un-bracketed data fall in the baseflow and hence the observation is not coming under 95 percent boundary in at the base flow. There are observed peak values in year 1985 (calibration) are not falling under 95ppu and same condition in 2001, 2005, and 2006 (validation), because of these extreme events cannot be simulated by SWAT and under-predicts the largest flow events in TRB (Tolson and Shoemaker 2007). To parameterize a model better and to minimize the uncertainty range a careful calibration and prediction UA are required in practical water resources (Duan et al. 1992; Van Griensven et al. 2008). The goodness of fit was assessed through the use of the R2 and the NSE between the observed and the final simulated values (Narsimlu et al. 2015) and the closeness between these two during calibration indicates a good agreement which were verified by higher values of R2 (0.74) and NSE (0.73) (Setegn et al. 2009). Since NSE are insensitive to systematic errors and yield good model performance even if low values are poorly fitted (Pfannerstill et al. 2014) and the major drawback with the R2 is that model give good R2 value when a model is systematically over or underestimate and even if all prediction is wrong (Krause et al. 2005). Moriasi et al. (2015) explained about the PMs and recommended not to use a single PMs to determine model performance but to use statistical PMs along with graphical PMs due to drawbacks associated with PMs. For the robust model performance statistical PMs such as PBIAS and RSR are also used with graphical analysis (Biondi et al. 2012). PBIAS has the ability to clearly indicate poor model performance (Gupta et al.1999) and RSR incorporates the benefits of error index statistics and in both cases when RSR is zero or has lower value, there are zero or lower the RMSE, and the better the model simulation performance (Moriasi et al. 2007). Graphical performance measures such as time series and scatter plots, cumulative charts and contour maps play a supplementary role where model in not performing well (Moriasi et al. 2015). Figure 7 shows the scatter plot (Palosuo et al. 2011) for the calibration period with a R2 value (0.743) which is indicating good collinearity between observed and simulated flow and has almost same value as model predicted (Santhi et al. 2001; Van Liew et al. 2003).
Here the result of calibration shows that low value of p-factor (0.54) which indicates the low percentage (54%) of bracketing of measured data in 95ppu plot (Fig. 6) and range of uncertainty in the output. The thickness of uncertainty band can be seen in 95ppu by the r-factor (0.76). The low p and large r-factor indicate the uncertainty in simulation caused by error in the rainfall and temperature input (Setegn et al. 2009). Calibration result can also be justified by seeing the trend of simulated and observed flow rates in 95ppu plot (Fig. 6) which are usually following the same trend, with a slight underestimation of the simulated values compared to observed data. The r-factor during calibration is relatively large but it is less than one means good result. Since most of part of TRB lies in mountainous regions and in such cases input uncertainty could be very large (Abbaspour et al. 2007). Yang et al. (2008) described the conceptual model uncertainty may be due to the processes that are actually occurring in the watershed but they have not included in the model such as the natural process (volcanoes, landslides, etc.) and landslides are common processes happening in TRB. Some other type conceptual uncertainty may be due to processes that are included in SWAT but are unaccountable to user as we have not accounted reservoirs due to non availability of reservoir data which may cause the uncertainty in output. The uncertainty in model may be due to the soil erosion which is not considered in model that affects the structure, infiltration capacity and other properties of the soil (Setegn et al. 2009). During validation there is an increment of 8% in p-factor from 0.54 to 0.68 and r-factor varies from 0.76 to 0.56 which shows good validation (high p and low r-factor value) result and lower uncertainty range. Figure 10 shows the best match (R2 = 0.749) of observed and simulated value is supporting the validation.
Conclusion
The uncertainty, and its quantification overcomes as a challenging task in the SWAT model predictions that depends on the uncertainty technique that has been used and the way it is implemented. Therefore hydrologic model (SWAT) needs some efficient and effective algorithms. To check the uncertainty in the prediction of hydrological variables such as streamflow needs rigorous calibration. The results indicate a few parameters ALPHA_BF, followed by SOL_K, SFTMP, SLSUBBSN, and SOL_AWC are most sensitive and have a great impact on the stream flow. The evaluation of SWAT model for discharge is verified by PMs satisfies the PEC of model provided by Moriasi et al. (2015). The experimental watershed demonstrates that the SUFI-2 produces reasonable outcomes for calibration, UA, and validation of the SWAT model. The minimum differences between observed and SWAT simulated flow is shown by SUFI-2 algorithms which needs the adjustment of the parameter ranges for good results and more additional iterations. The monthly simulation for the Meja station may be satisfactory during the calibration period while during validation the SWAT model exhibit small uncertainties and good validation result.
References
Abbaspour KC (2005) Calibration of hydrologic models: when is a model calibrated? In Zerger, A. and Argent, R.M. (eds) MODSIM 2005 International Congress on Modelling and Simulation. Modelling and Simulation Society of Australia and New Zealand, pp. 2449–12455.
Abbaspour KC (2015) SWAT-CUP: SWAT Calibration and Uncertainty Programs - A User Manual.
Abbaspour KC, Johnson A, van Genuchten M Th (2004) Estimating uncertain flow and transport parameters using a sequential uncertainty fitting procedure. Vadose Zone J 3(4), 1340–1352.
Abbaspour KC, Yang J, Maximov I, Siber R, Bogner K, Mieleitner J, Zobrist J, Srinivasan R (2007) Modelling hydrology and water quality in the pre-alpine/alpine Thur watershed using SWAT. J Hydrol 333:413–430
Abbaspour KC, Faramarzi M, Ghasemi SS, Yang H (2009) Assessing the impact of climate change on water resources in Iran. Water Resour Res 45:W10434. doi:10.1029/2008WR007615
Abbaspour KC, Rouholahnejad E, Vaghefi S, Srinivasan R, Yang H, Kløve B (2015) A continental-scale hydrology and water quality model for Europe: Calibration and uncertainty of a high-resolution large-scale SWAT model. J Hydrol 5(24):733–752
Arnold JG, Fohrer N (2005).SWAT2000: Current capabilities and research opportunities in applied watershed modeling. Hydrol Proc 19(3): 563–572.
Arnold JG, Allen PM, Morgan D (2001) Hydrologic model for design of constructed wetlands. Wetlands 21(2):167–178
Arnold JG, Moriasi DN, Gassman PW, Abbaspour KC, et al., (2012) SWAT: model use, calibration, and validation. Am Soc Agri Biol Eng. 55(4): 1491–1508.
Beven K (2000) Rainfall-runoff modeling: the primer. Wiley, New York
Beven K, Binley A (1992) The future of distributed models: model calibration and uncertainty prediction. Hydrol Process 6:279–298
Bicknell BR, Imhoff JC, Kittle JL, Donigian AS, Johanson RC (1997) Hydrological simulation program–fortran, user’s manual for version 11: USA Environmental Protection Agency, National Exposure Research Laboratory, Athens, EPA/600/R-97/080, 755 p.
Biondi D, Freni G, Iacobellis V, Mascaro G, Montanari A (2012) Validation of hydrological models: conceptual basis, methodological approaches, and a proposal for a code of practice. Phys Chem Earth 42–44:70–76
Borah DK, Bera M (2004) Watershed–scale hydrologic and nonpoint–source pollution models: review of applications. American Society of Agricultural Engineers. ISSN 0001–235 47(3):789–803
Duan Q, Sorooshian S, Gupta VK (1992) Effective and efficient global optimization for conceptual rainfall-runoff models. Water Resour Res 28(4):1015–1031
Engel B, Storm D, White M, Arnold JG, Arabi M (2007) A hydrologic/water quality model application protocol. JAWRA, 43(5), 1223–1236.
Gassman PW, Reyes M, Green CH, Arnold JG (2007) The Soil and Water Assessment Tool: Historical development, applications, and future directions. Trans ASABE. 50(4): 1211–1250.
Gupta HV, Sorooshian S, Yapo PO (1999) Status of automatic calibration for hydrologic models: comparison with multilevel expert calibration. J Hydrol Eng, 4(2), 135–143.
Gupta HV, Beven KJ, Wagener T (2006) Model calibration and uncertainty estimation. Encycl Hydrol Sci 11:131.
Gupta HV, Wagener T, Liu Y (2008) Reconciling theory with observations: Elements of a diagnostic approach to model evaluation. Hydrol Proc 22(18): 3802–3813.
Helton JC, Davisb FJ (2003) Latin hypercube sampling and the propagation of uncertainty in analyses of complex systems. Rel Eng System Saf 81(2003):23–69
Krause, P., Boyle, D., & Bäse, F. (2005) Comparison of different efficiency criteria for hydrological model assessment. Adv Geosci, 5, 89–97.
Kuczera G, Parent E (1998) Monte Carlo assessment of parameter uncertainty in conceptual catchment models: the Metropolis algorithm. J Hydrol 211(1–4):69–85
McKay MD (1988) Sensitivity and Uncertainty Analysis Using a Statistical Sample of Input Values. In: Ronen Y (ed) Uncertainty Analysis. CRC press, Inc, Boca Raton, pp 145–186
McKay MD, Beckman RJ, Conover WJ (1979) A comparison of three methods for selecting values of input variables in the analysis of output from a computer code. Technometrics 21:239–245
Mengistu DT, Sorteberg A (2012) Sensitivity of SWAT simulated streamflow to climatic changes within the Eastern Nile River basin. Hydrol Earth Syst Sci 16(391–407):2012. doi:10.5194/hess-16-391-2012
Moriasi DN, Arnold JG, Van Liew MW, Binger RL, Harmel RD, Veith T (2007) Model evaluation guidelines for systematic quantification of accuracy in watershed simulations. Trans ASABE 50(3): 885–900.
Moriasi DN, Wilson BN, Douglas-Mankin KR, Arnold JG, Gowda PH (2012) Hydrologic and water quality models: use, calibration, and validation. Trans ASABE. 55(4): 1241–1247.
Moriasi DN, Gitau MW, Pai N, Daggupati P (2015) Hydrologic and water quality models: Performance measures and evaluation criteria. Trans ASABE. 58(6): 1763–1785. (doi:10.13031/trans.58.10715)
Narsimlu B, Gosain AK, Chahar BR, Singh SK, Srivastava PK (2015) SWAT model calibration and uncertainty analysis for streamflow prediction in the Kunwari River Basin, India, Using Sequential Uncertainty Fitting. Environ. Process. Doi:10.1007/s40710-015-0064-8.
Nash JE, Sutcliffe J (1970) River flow forecasting through conceptual models: part I—a discussion of principles. J Hydrol 10:282–290
Neitsch SL, Arnold JG, Kiniry J, Williams J, King K (2005) Soil and Water Assessment Tool theoretical documentation version 2005 Texas, USA
Palosuo T, Kersebaum KC, Angulo C, Hlavinka P, Moriondo M, Olesen JE, Patil R, Ruget F, Rumbaur C, Takáč J, Trnka M, Bindi M, Caldag B, Ewert F, Ferrise R, Mirschel W, Saylan L, Siska B, Rötter R (2011) Simulation of winter wheat yield and its variability in different climates of Europe: A comparison of eight crop growth models. Eur J Agron 35(3):103–114
Patel D, Srivastava P (2013) Flood hazards mitigation analysis using remote sensing and GIS: correspondence with town planning scheme. Water Resour Manag 27:2353–2368. doi:10.1007/s11269-013-0291-6.
Pfannerstill M, Guse B, Fohrer N (2014) Smart low flow signature metrics for an improved overall performance evaluation of hydrological models. J Hydrol 510:447–458
Rostamian R, Jaleh A, Afyuni M, Mousavi SF, Heidarpour M, Jalalian A, Abbaspour KC (2008) Application of a SWAT model for estimating runoff and sediment in two mountainous basins in central Iran. Hydrol Sci J 53:977–988
Santhi C, Arnold JG, Williams JR, Dugas WA, Srinivasan R, Hauck LM (2001) Validation of the SWAT model on a large river basin with point and nonpoint sources. J Am Water Res Assoc 37(5):1169–1188
Schuol J, Abbaspour KC, Srinivasan R, Yang H (2008a) Modelling blue and green water availability in Africa at monthly intervals and subbasin level. Water Resources Res 44:W07406. doi:10.1029/2007WR006609
Schuol J, Abbaspour KC, Sarinivasan R, Yang H (2008b) Estimation of freshwater availability in the West African Subcontinent using the SWAT hydrologic model. J Hydrol 352(1–2):30–49.
Setegn G, Srinivasan R, Melesse AM, Dargahi B (2009) SWAT model application and prediction uncertainty analysis in the Lake Tana Basin, Ethiopia. 24:357–367. DOI:10.1002/hyp.7457.
Singh V, Bankar N, Salunkhe S, Bera AK, Sharma JR (2013) Hydrological stream flow modelling on Tungabhadra catchment: parameterization and uncertainty analysis using SWAT CUP. Curr Sci, VOL. 104, NO. 9
Sorooshian S (1983) Surface water hydrology: Online estimation. Rev Geophys 21(3):706–721
Spruill C, Workman S, Taraba J (2000) Simulation of daily and monthly stream discharge from small watersheds using the SWAT model. Trans ASAE 43:1431–1439.
Tolson BA, Shoemaker CA (2007) Cannonsville reservoir watershed SWAT2000 model development, calibration and validation. J Hydrol 337:68–86
Van Griensven A, Meixner T (2006) Methods to quantify and identify the sources of uncertainty for river basin water quality models. Water Sci Technol 53(1):51–59
Van Liew MW, Arnold JG, Garbrecht JD (2003) Hydrologic simulation on agricultural watersheds: Choosing between two models. Trans. ASAE 46(6): 1539–1551.
Van Griensven A, Meixner T, Srinivasan R, Grunwals S (2008) Fit-for-purpose analysis of uncertainty using split-sampling evaluations. Hydrol Sci J 53(5):1090–1103
Vrugt JA, Gupta HV, Bouten W, Sorooshian S (2003) A shuffled complex evolution metropolis algorithm for optimization and uncertainty assessment of hydrologic model parameters. Water Resources Res 39(8):1201. Doi:10.1029/2002WR001642
Wagener T, Gupta HV (2005) Model identification for hydrological forecasting under uncertainty. Stoch Env Res Risk A 19:378–387
Wagener T, Sivapalan M, McDonnell JJ, Hooper R, Lakshmi V, Liang X, Kumar P (2004) Predictions in ungauged basins (PUB): a catalyst for multi-disciplinary hydrology. Eos, Trans. AGU. 85(44): 451–452
Yang J, Reichert P, Abbaspour KC, Xia J, Yang H (2008) Comparing uncertainty analysis techniques for a SWAT application to the Chaohe Basin in China. J Hydrol 358:1–23
Yesuf HM, Melesse AM, Zeleke G, Alamirew T (2016) Streamflow prediction uncertainty analysis and verification of SWAT model in a tropical watershed. Environ Earth Sci 75:806.DOI:10.1007/s12665-016-5636-z.
Zeckoski RW, Smolen MD, Moriasi DN, Frankenberger JR, Feyereisen GW (2015) Hydrologic and water quality terminology as applied to modeling. Trans ASABE, 58(6), 1619–1635.
Zhang X, Srinivasan R, Bosch D (2009) Calibration and uncertainty analysis of the SWAT model using Genetic Algorithms and Bayesian Model Averaging. J Hydrol 374(2009):307–317
Zhang X, Srinivasan R, Liew MV (2010) On the use of multi-algorithm, genetically adaptive multi-objective method for multi-site calibration of the SWAT model. Hydrol Process 24:955–969
Zheng Y, Keller AA (2007) Uncertainty assessment in watershed-scale water quality modeling and management: 1. Framework and application of generalized likelihood uncertainty estimation (GLUE) approach. Water Resour Res 43: doi:10.1029/2006WR005345.
Zheng C, Hill MC, Cao G, Ma R (2012) MT3DMS: Model use, calibration, and validation. Trans. ASABE, 55(4), 1549–1559.
Acknowledgements
The corresponding author is thankful to University Grant Commission (UGC), New Delhi, India for sponsoring major research project (MRP) [grant no. 42–74/2013 (SR)] to carry out this research work.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Kumar, N., Singh, S.K., Srivastava, P.K. et al. SWAT Model calibration and uncertainty analysis for streamflow prediction of the Tons River Basin, India, using Sequential Uncertainty Fitting (SUFI-2) algorithm. Model. Earth Syst. Environ. 3, 30 (2017). https://doi.org/10.1007/s40808-017-0306-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40808-017-0306-z