
Abstract
Main global environment and ecological functions and structure affected by land use/cover changes (LUCC). Analysis of the dynamic LUCC can be very useful in biosphere reserves (BRs) management. The Land use and cover (LULC) spatio-temporal changes in the Arasbaran BR were classified (as Agricultural, Forest and Barren/Range lands), and compared with future spatial pattern (simulated using the CA-Markov model) to evaluate qualitative and quantitative changes of this BR LULC over time (1989, 2000 and 2013 with 2037). This analysis consisted of the whole area and also in respect to each of the zones within the Arasbaran BR (as a new approach to assess BR management quality). Based on this approach, the LUCC monitoring alongside the future simulation offers an early warning system that also shows us trends and consequences of the changes for the whole BR as well as for each zone (including the core zone) of BR separately. The results show a downward trend for forestland at the expense of increasing agricultural and barren/range land surface areas. Furthermore this loss of remnant forest vegetation is not only true for the whole BR (; including its buffer and transitional zones) but is happening within the core zone where it will probably continue more severely in the near future. The results demonstrate the priority need for more severe regulations regarding protection of this BR against LUCCs and for its valuable core zone forest LULC in particular.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Protected areas under the surveillance of the Departments of Environment (DOE) or Environmental Protection Agencies (EPAs) or Organizations all around the world are established to maintain and protect valuable biodiversity needed by human being for different reasons. But if LUCC occur within or in close surrounding of these protected areas, their usefulness regarding conservation of biodiversity for the future generations will be severely threatened (Kharouba and Kerr 2010; Montesino Pouzols et al. 2014; Overmars and Verburg 2005; Verburg et al. 2006). BR is an area with terrestrial and coastal ecosystems and is designed to promote solutions to reconcile conservation of biodiversity with its sustainable use. BR is composed of and also organized into 3 interrelated zones; the core area, the buffer zone and transition area (Kušová et al. 2008; Saricam and Erdem 2012). According to the BR model, core zones consist of areas designated to be strictly reserved and protected by surrounding buffer zones where traditional (low impact) land use practices are allowed and then with transition zones where more intensive land use practices are gradually permitted (Lourival et al. 2011; Saricam and Erdem 2012). Based on this model of BR sustainable development is achieved while protection and conservation of natural resources also maintained; including biodiversity as well as land (Kušová et al. 2008; Lange 2011). Management measures are then based on a dynamic approaches to LUCC constantly being monitored and evaluated. Unfortunately, despite its potential for sustainable land use management practices, the BR model in Iran has only been used for a primary zoning of landscapes with exceptional natural resources followed by a static (more often) unsuccessful management. The simple zoning and delineation of the boundaries are often not sufficient to preserve and maintain ecosystems and the biodiversity (Bates and Rudel 2010; Verburg et al. 2006). All LUCC issues are related to or within a human-environment system where interactions of various drivers with different feedbacks and consequent interactions affect the development patterns (Lambin et al. 2001; Verburg et al. 2004). LUCC identifies all kinds of human modification on the Earth’s surface (Jokar Arsanjani et al. 2013; Lambin and Geist 2006) and is a complicated process caused by various social and environmental factors in different spatial and temporal scales (Rindfuss et al. 2004; Valbuena et al. 2008). LUCC influence main ecological functions and critical issues of global environment (de Chazal and Rounsevell 2009; Dong et al. 2009).
Thus, future LUCC simulation makes predictions of changes in the landscape pattern or structure. It is now feasible to evaluate trends and changes with given quantities (amount), in specific locations and time of most probable changes. Regarding the results more proper planning and more effective recommendations are achieved and on-time policy-making meeting obligations for a sustainable development may become available.
This research was attempted to provide information on the present LULC pattern of Arasbaran BR harboring valuable genetic resources. Analysis of changes in the trend of landscape pattern was aimed using the past LULC presented by RS data, its present landscape cover condition and finally the future LULC using simulation modeling for the whole BR as well as for each zone.
Materials and methods
Study area
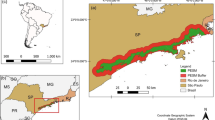
Considering (national and global) importance of Iranian BRs containing important wild remnants and relic vegetation (belonging to before the ice age era) and also the important wild relatives of main crops (grains and forages) as local land races the Arasbaran BR in the northeastern region of Iran may be considered to be worth of preservation in particular. The Arasbaran BR is located in the north of the Eastern Azerbaijan province, Iran. It is about 160 km away from the capital city Tabriz and lies within between the 38° 43′ 41″ N to 39° 8′ 11″ N and 46° 39′ 50″ E to 47° 1′ 48″ E (Fig. 1). Biogeographically, this area is called the Hirakano-vasini region or Arasbaranian region. It is in a highly mountainous region rising from 256 to 2896 m above sea level (highest peak Keshish-Qelbisii).

Location of Arsbaran BR (with its management zones)
The diversity of vegetation and habitats in the core area proves the importance of having a well-defined land use plan and resource use policy within this whole region and for the Arasbaran BR specifically. Until 2011 total population living in this area was about 7911 persons living in 79 villages (4 of them abandoned today) (Implementation of the 2011 Iranian Population and Housing Census 2011). In the core zone there are 4 villages with a total population of 120 people (in the buffer zone and transition areas there are 59 and 16 villages with a total population of 4345 and 3446 persons respectively). The livelihood of people in these villages is basically an agrarian economy with self-sufficiency based on local supply of the natural resources. One of their unique characteristics is that they tend to obey the ecosystem supply carrying capacity in correlation to the seasonal (calendar) resource availability.
Data collection
Remotely sensed data have been widely used as a very cost effective mean to obtain geo-referred data and maps for evaluation and monitoring of LULC. Land use change models are increasingly used for prediction and analysis of LULC and its consequent impacts (Koomen and Beurden 2011; Lambin et al. 2001) in decision-making and for planning support systems aiming at sustainable land use and development patterns.
Following the literature review appropriate LULC maps with acceptable temporal ranges were provided to analyze LUCC trend in Arasbaran BR. Considering suitability of cloud-free spatial coverage with a relatively high spatial and spectral resolution of several multi-date satellite images were necessary. These were to be taken at the same time of the year (same plant growing seasons). RS images of Landsat satellites were selected to be used because it affords an investigation of long-term variation in LULC types in the study area (Table 1). Once limitations and constraints regarding acquisition of data were taken into account a 24-years period or time-span was found potentially possible for monitoring and evaluation of LULC dynamic. The research was undertaken through the steps shown in Fig. 2.

Demonstration of the research methodology as a flowchart
Data (pre-) processing and image classification
Pre-processing of satellite images is essential and aims at the unique goal of establishing a more direct linkage between the data and biophysical phenomena it represents (Abd El-Kawy et al. 2011; Coppin et al. 2004). Geometric correction was done using GPS data during field surveys. Image enhancement was used to adjust and improve specific visual qualities of the image using Histogram Equalization that was applied by ERDAS Imagine software. Map derivation from the images was done by unsupervised and supervised classification in Erdas Imagine 9.1 environment. The goal of the unsupervised classification is to achieve a general knowledge about the available LULC classes in the area as a result it proceeds without any choice of specific information about the features contained in any image (Giri et al. 2005; Giri 2012). The outputs of this stage will be used as a helpful aid in training samples. The ground referenced data required for image classification gathered by combining Google-earth and GPS points during the field survey. A signature file generated from ground reference data using the Signature Editor in ERDAS imagine 9.1. The Supervised Classification by contrast was done using the Maximum Likelihood Classifier (MLC) for each of the images separately. So multiband classes were derived statistically and each unknown pixel was assigned to the class determined by the MLC. The MLC tool considers both the variances and covariances of the class signatures when assigning each cell to one of the classes represented in the signature file (liu and Yetik 2010). The output of this stage is the LULC map of each image. Three LULC categories were extracted from TM, ETM+, and OLI images including those of agricultural land, barren/range land and forest land types.
Following image classification stage an accuracy assessment was performed for each image based on 260 points selected by stratified random method in ERDAS imagine 9.1 environment. Stratified random sampling techniques were readily accepted as the most appropriate method of sampling for resource evaluation studies that use remote sensing imagery data. This is because important minor categories are also satisfactorily represented (Genderen et al. 1978). Classification products were finally compared with reference data (GPS points, topographic maps and Google earth software) using Error Matrix before being used for evaluation.
Prediction of future LULC
A large diversity of land use modelling (including simulation models in time and locations) based on various methods and using different applications are contested by recent literature reviews i.e.: (Heistermann et al. 2006; Koomen and Beurden 2011; Verburg et al. 2004). There are several conceptual approaches to land use change modelling. These include: models based on Cellular Automata, or those using Statistical Analysis for modelling, models using Markov chain approach, or Artificial Neural Network and finally those of Agent Based Modelling (Koomen and Beurden 2011; Subedi et al. 2013). Integration of Markov chains and Cellular Automata approaches to modelling (C-A Markov model) is used in advantage for this case study in order to predict the future LULC of Arasbaran BR.
Markov chain
Markov chain presented by a Russian mathematician named Andrei A. Markov in 1970 but in land use modeling, it was first used by Burnham (Burnham 1973). Markov chains are stochastic processes (Balzter 2000) and uses the matrices that show changes between
land-use categories (based on the basic core principle of continuation of historical development) (Koomen and Beurden 2011) and widely used in modeling and simulating changes and trends of LULC (Balzter 2000; Coppedge et al. 2007; Hathout 2002; Luo et al. 2008; Muller and Middleton 1994; Weng 2002). The homogeneous Markov model for prediction of land use change can be mathematically presented as (Subedi et al. 2013):
where L (t) and L (t+1) represent land use statuts at time t and t + 1 respectively. And \(\sum\nolimits_{j = 1}^{m} {P_{ij} } = 1\)(i, j = 1, 1, 2,…, m) is the transition probability matrix in a given state. A disadvantage of this type of analysis is that it is not spatial, requiring additional assumptions to allocate spatial characteristics to LULC types (Araya and Cabral 2010; Koomen and Beurden 2011).
Cellular automata (CA)
The most well-known land use change conceptual concept is called CA developed by Ulam in 1940 (Singh 2003). This was first used by Tobler in geographical modelling (Tobler 1979). CA is probably the simplest dynamic spatial model (Ward et al. 2000) for simulation of future land use. It consists of a grid or a raster space, a set of states characterizing the grid cells and a definition for the neighborhood arrangement of cells, a set of transition rules determine the state transitions for each of the cells as a function of the position of neighbouring cells and a sequence of discrete time steps then updates composition and configuration of all the cells simultaneously (White and Engelen 2000). The basic principle of CA is that land use change for any location (cell) can be explained by its current state and changes in its neighboring cells. It is, thus, based on the core principles of continuation of the historical development and result of neighborhood interaction (Koomen and Beurden 2011).
CA–Markov model
Both the “Cellular Automa” and the “Markov Chain” models are considered to be discrete dynamic models in time and state (Ye and Bai 2007). Combination of Markov Chain and Cellular Automata used together present considerable advantages for modeling land use changes (Guan et al. 2011; Pontius and Malanson 2005). The inherent problem with Markov chain model is lack of providing spatially referred output and despite the fact that transition probabilities may be accurate on per category basis, but there is no specification on spatial distribution of each land use category occurrence (Ye and Bai 2007). Cellular automa adds into Markov model not only spatial contiguity but also the probable spatial transitions occurring in particular area over a time (Subedi et al. 2013). In fact, it retrieves the quantity of change from the Markov Chain model and makes it geo-referred and spatial through a cellular automata (Jokar Arsanjani et al. 2013). CA–Markov model use Markov Chain Analysis outputs particularly its Transition Area file to apply a contiguity filter to grow out land use characteristics from time two into a later time period. In essence, the CA develops a spatially explicit weighting that is more in areas proximate to the existing land uses. This ensures that land use change occurs proximate to existing like land use classes, and not wholly random (Zubair 2006). Series of studies applied CA–Markov in LULC modelling and simulation (Gong et al. 2015; Guan et al. 2011; Halmy et al. 2015; Jokar Arsanjani et al. 2013; Kamusoko et al. 2009; Memarian et al. 2012; Nejadi et al. 2012; Yang et al. 2014). The CA–Markov model is considered a robust approach because of its quantitative estimation and the spatial and temporal dynamic it has for modelling LULC dynamic (Koomen and Beurden 2011; Sang et al. 2011; Subedi et al. 2013). Furthermore, both GIS and RS data may be easily incorporated in C-A Markov modelling (Jokar Arsanjani et al. 2013; Yeqiao and Xinsheng 2001) to facilitate tasks and to reduce the cost and the time needed.The algorithms available in the IDRISI Andis environment used to predict the future LULC of the study area based on CA–Markov model.
Validating the LULC prediction model
In order to investigate similarities between actual image and the simulated image, model’s output was compared to the present or actual land use (composition and configuration) map. Comparing simulated or predicted LULC map representing the 2013 LULC with actual LULC (map of 2013) was based on KIA (Kappa Agreement Index) approach, a method widely used to validate LCLU change predictions (see (Ahmed et al. 2013; Jiang et al. 2015; Jr. et al. 2001; Vliet 2009)). The VALIDATE module in IDRISI Andes was used for this purpose.
LULC changes detection
Cross tabulations used to determine and present the quantity of conversions occurred regarding each particular LULC to other types replacing them (Pontius et al. 2004). LULC maps for pairs of consecutive years compared LULC types using cross-tabulation in Idrisi Andes software package specifically for quantification of changes rather than having spatially referred location of changes during 1989–2000, 2000–2013, 1989–2013 and 2013–2037. This is important for determination of trends and consequential land use types appearing or disappearing in order to calculate costs and benefits and later impacts of land use on local economy as well as their impacts on the regional environment (Forman and Godron 1986).
Results and discussion
LULC maps and precision assessment
Following the finding was obtained by data analysis. It should be noted here that the limitations in selection of satellite images did not permit selecting and using data for identical time spans (serial or equal dates in between two dates when images could be acquired). Only by assuming similarity of conditions and changes comparisons involved may be correct. Before using RS data their accuracy is analyzed for robust classification results. In thematic maps obtained from RS data the term accuracy is typically used to express the degree of ‘correctness’ of a map or a classification (Foody 2002; Pontius and Millones 2011). The overall classification accuracy (the percentage of correctly classified pixels (Liu and Zhou 2004)) of each LULC classification map for 1989, 2000 and 2013 was estimated to be 85.4, 86.03 and 88.9 % respectively. The overall statistical Kappa values were also 0.8233, 0.8445 and 86.765 respectively.
The percentage and coverage of major LULC types in Arasbaran BR were derived from three satellite images for 1989, 2000, 2013 (see Fig. 3 and Table 2).

LULCs maps; actual (1989, 2000, to 2013) and simulated (2013 and 2037)
Image classification (of 1989, 2000 and 2013) results show three distinct LULC classes; Agricultural, Forest, and Barren/Range land cover types. The main types of LULC are barren/range land with 56.91, 61.39 and 60.81 % of BR’s total surface area in 1989, 2000 and 2013 respectively. Results show that a continuous intense trend of reducing or decreasing forestland from 1989 to 2000 existed but that this trend became relatively less intensive (from 40.21 to 34.95 %) by 2000–2013 and then was even further reduced to about 33.34 % during 2007–2013 (Fig. 4).

LUCCs in Arsbaran BR during 1989–2037
Agricultural lands increased from 2.86 % in 1989 to 3.65 % by 2000 and then to 5.754 % for 2013 due to the fact that the traditional livelihood remains farming. Agricultural lands are mainly located close to the northern edge and north-eastern limits of the BR where alluvial lands close to the Aras River are found. Also Table 3 shows the percentage and coverage of major LULC types in respect to each of the zones within the Arasbaran BR. The forest area of 4726.154 ha in 1989 was reduced to 3375.083 ha in 2013. The calculation of the forest land area in the buffer zone and transition area will reduce to 23340.24 and 248.7871 ha by 2013 respectively.
Prediction of future LUCCs and validating LULC prediction model
To predict future LULC types, Markov model was applied to estimate Markovian probability transition area and Matrix using LULC maps of 1989 and 2013 and finally the output was used to predict LULC pattern changes in 2037 based on 2013 as the initial state (basic land cover image). Assuming that the present management and current land use change trends will continue in future, through CA–Markov model the future LULC (for the year 2037) were predicted to be as given by Fig. 3 and Table 2. Indicating an incremental trend of agricultural and barren/range lands at the expense of deforestation until 2037 (Fig. 4).
Estimates regarding forest surface area within the core zone, buffer zone and the transition area reaches 27.73, 33.72 and 1.56 % of this zone by 2037 (Table 3). Unfortunately forecasts show a constant decline of forest surface area as it has been during the past 24 years (from 1989) (Fig. 5).

Area changes of LULCs in each BR zones during the study period
In order to validate the LULC prediction given by models, the simulated land use areas were compared with those actually present. The LULC for 2013 was predicted through the model and was then compared with the actual LULC map of 2013. Comparison of the simulated map prepared for the year 2013 and that of the classified map is shown by Table 4. Visual analysis indicates that simulated LULC map and actual map have relatively close resemblances.
As shown in Table 4 agricultural land has the best agreement where the simulated area is 4596.2905 ha (5.700 %), while the actual area 4641.119 ha (5.754 %). It clearly illustrates that in the simulated LULC map, barren/range land and agricultural land areas are underestimated but the predicted amount of forestland is overestimated. Yet more detail statistical analysis (based on the Kappa coefficient) measuring the overall agreement of the matrix, the ratio of diagonal values summation versus the total number of pixel counts within the matrix, as well as the non-diagonal elements, would probably better assess the model accuracy (Jokar Arsanjani et al. 2013).
Kappa value of 0 illustrates agreement between actual and reference map (equals chance agreement), the upper and lower limit of kappa is +1.00 (occurs when there is total agreement) and −1.00 (represents agreement which is less than chance) (Congalton 1991; Lakide 2009; R. Gil Pontius 2000). The accuracy assessment process was done using VALIDATE module existing in the IDRISI Andis environment. Resulting K values (Kno = 0.968, Kstandard = 0.963, KlocationStrata = 0.983 and Klocation = 0.983) were all well above 0.9 showing a satisfactory level of accuracy. If the result were greater than 0.80 for each kappa index agreement, K statistics were accurate (Viera and Garrett 2005). The model validation indicates that the 2013 simulation has a good agreement with the 2013 reference map. It is therefore concluded that CA–Markov modeling is suitable for accurate prediction of future LUCCs and it may be very useful for environmental management decision making and planning regarding management of protected areas of biosphere reserves.
LULCs
Overall LUCC of all LULC type categories during various periods are given by Table 5. A deforestation of 6010.74 ha existed between 1989 and 2000 resulting to increased agricultural land (112.68 ha) and barren/range land (5898.06 ha). At the same time 1777.05 ha of barren/range lands were converted into forest which means 4233.69 ha of forest land was lost.
The amount of deforestation during second time period (2000-2-13) was 5912.73 ha (transformed (deforestation) to barren/range lands and farmland). Rigorous protection during 2000 to 2013 period resulted to reduced net loss of forests (1260.9 ha), Yet by 1989 to 200, 4233.69 ha of forests was degraded. Finding regarding deforestation from 2013 to 2037 period is alarming especially if this trend is going to continue. Accordingly when deforestation has been 11923.47 ha during 1989 to 2013 then by 2037, 92.16 and 4444.11 ha of forest is projected to be converted into agricultural land and barren/range lands respectively. Statistics demonstrate an increase of total LULC change through the time; more in the second period compared to the first. The annual average of overall Arasbaran LUCCs amount between 1989 and 2013 was 539/68 ha per year, meaning that 12952.35 ha of the 80654.8 ha (total area of the study area) changed during past 24 years. Figure 6 designated to show which categories the forests converted into and shows conversions into Barren/range land was the most common.

Transitions to and from LULC types during 1989–2013 (in ha)
Changes in each zone are also given by Table 6. Total amount of degradation has increased in all three zones during the second time period (2000-2013) compared to the first (1989-2000); while based on forecasting it is predicted that this trend will hopefully decrease during the third period (2013-2037) in all zones due to more rigorous protective measures already adopted from the last decade. Total loss of the core zone forests is estimated equal to 755.46 ha by 2037 with 1233.63 and 5675.13 ha of forest loss for the buffer zone and the transition areas respectively. Despite the increasing deforestation everywhere within BR, it is particularly in the core zone which degradation and deforestation is most regrettable. Between 1989–2013 the core zone has experienced deforestation of 1862.1 ha and will face another 614.61 ha of deforestation by 2013.
The calculation indicates the loss of forest area at 396.92 and 55.24 ha per year in the whole area and the core zone between 1989–2013 respectively. The rate of gain in agricultural land will be lower in 2013–2014 compared to 1989–2013 (see Table 7, 8).
Unfortunately forestland underwent declines over the studied period and the downward trend continues in the near future. Gains of Barren/range land from forestland was about 77.57 ha per year while in the contrast only 22.35 ha per year gained from it to forestland (the only gains source for forest land) in 1989–2013. Table 8 shows that the core zone lost about 1351.07 of its forests in the period 1989–2013; it is also predicted we are losing about the 20.64 ha each year by 2037. The highest amounts of change were generally in the core zone with degradation forestland to Barren/range land during 1989–2013 and then also will maintain its highest conversion amount in future 24 years. A net forest loss of 1325.7 ha during 1989 to 2013 where presumably very limited human intervention is allowed is surprising!. Most valuable forest reserves and wild species (plants and animals) with genetic resources are presumably protected and conserved in situ by the presence of the same core zone which is severely threatened.
Conclusions
This study showed the important role of LUCCS for biosphere reserves planning and management where modeling can provide proper information in time for decision making against BRs degradation. The above mentioned method for extraction of LULC maps (1989, 2000, and 2013), and the simulation used to predict the future LULC (2037) aided by the CA–Markov modeling, have allowed us an analysis of LUCCs in respect to both the type and the extent of each LULC while also illustrating LULC conversions for the whole Arasbaran BR as well as for each of the BR zones separately.
The LULC modelling provided accurate forecasting (comparatively verified) regarding the composition and the configuration of LUCCs. In addition the results of this study indicate that the integrating unsupervised classification and visual interpretation with supervised classification of remote sensing images can create a robust mean of extracting appropriate LULC maps. The predictive ability of the simulation model proved to be good and CA–Markov as a useful tool for (quantitative and qualitative) LUCCs prediction. This is why we believe that the CA–Markov model can be useful in land use policy design and we can effectively achieve various land use planning goals and objectives within the framework of sustainable land use development and management policy recommendations as general and particularly BR stewardship objectives. Results gained from similar studies also (i.e. (Gong et al. 2015; Jokar Arsanjani et al. 2013; Nejadi et al. 2012)) confirmed that CA–Markov model has considerable advantages and can be used as a robust tool to land use planning.
Planning is done for the future, so it is necessary for the land use planners and policy makers to obtain information about the past, the present and the future in order to establish goals and to make appropriate decisions regarding policies needed to deal with future land use challenges. This method using LULC simulation along with statistical analysis is convenient for responding to this need by providing dynamic LULC change prediction (analyzing previous and current LULC maps and predicting future LULC). Analyzing the land use change dynamic within biosphere reserve zones makes it possible to find out the plausible and potential future threats for the whole reserve as well as for each zone separately. According to the concept of BRs, the main mission of the biosphere reserve is to strengthen general awareness of mutual interrelations between humankind and the biosphere natural environment, improve monitoring, education and participation in biosphere reserves management (Lange 2011; Lourival et al. 2011); so increasing the awareness and capacity building of people should go hand in hand with effective protection and then to reclaim the lost forest areas following successful conservation of remaining valuable land covers. Therefore, considering the dominant trend of deforesting it is vital to design and define different scenarios of land use changes. Conservation strategies based on spatially explicit land use allocation models to overcome threats and regressive tendencies.
Unfortunately, land degradation is not restricted to the Arasbaran buffer zone or its transition area, but it also includes the BR’s core zone. As mentioned core zone has experienced major LUCCs. If the core zone of BRs encounters land use change such as deforestation, it is a priority to consider and engage resources for remediation and corrective action plan at all the scales seemingly necessary and appropriate.
Ecosystem degradation and landscape damage or alterations in Arasbaran BR zones is more significant within its core zone. The core zone at the heart of the Arasbaran BR is transformed by human activity, especially by logging and agriculture operation. Deforestation and human intervention are important threats to the highly rated biodiversity resources within the study area. Future land use change maps may be used as early warning system for conservation of this core zone reserve which consists of excellent natural resources but also as a laboratory where ecosystems are represented in their natural, undisturbed state as well as are not transformed by human activities (Lange 2011).
These LULCs may affect important species, biodiversity, natural habitat of fauna and flora and provision of ecosystem services (Martínez et al. 2009; Newbold et al. 2015; Zebisch et al. 2004). Meanwhile it is highly recommended to establish new zones and to extend the core zone as well as to arrange new buffer zones to improve protection of the core zone landscapes more effectively. This is a main priority task and even better if this is accomplished by engagement of local beneficiaries.
References
Abd El-Kawy OR, Rød JK, Ismail HA, Suliman AS (2011) Land use and land cover change detection in the western Nile delta of Egypt using remote sensing data. Appl Geogr 31:483–494. doi:10.1016/j.apgeog.2010.10.012
Ahmed B, Ahmed R, Zhu X (2013) Evaluation of model validation techniques in land cover dynamics. ISPRS Int J Geo-Inf 2:577–597. doi:10.3390/ijgi2030577
Araya YH, Cabral P (2010) Analysis and modeling of urban land cover change in Setúbal and Sesimbra. Port Remote Sens 2:1549–1563. doi:10.3390/rs2061549
Balzter H (2000) Markov chain models for vegetation dynamics. Ecol Model 126:139–154. doi:10.1016/S0304-3800(00)00262-3
Bates D, Rudel TK (2010) The political ecology of conserving tropical rain forests: a cross-national analysis. Soc Nat Resour 13:619–634. doi:10.1080/08941920050121909
Burnham BO (1973) Markov intertemporal land use simulation model. South J Agric Econ 5:253–258
Congalton RG (1991) A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens Environ 37:35–46. doi:10.1016/0034-4257(91)90048-B
Coppedge BR, Engle DM, Fuhlendorf SD (2007) Markov models of land cover dynamics in a southern Great Plains grassland region. Landsc Ecol 22:1383–1393. doi:10.1007/s10980-007-9116-4
Coppin P, Jonckheere I, Nackaerts K, Muys B, Lambin E (2004) Review Article: Digital change detection methods in ecosystem monitoring: a review. Int J Remote Sens 25:1565–1596. doi:10.1080/0143116031000101675
de Chazal J, Rounsevell MDA (2009) Land-use and climate change within assessments of biodiversity change: a review. Glob Environ Chang 19:306–315. doi:10.1016/j.gloenvcha.2008.09.007
Dong L, Wang W, Ma M, Kong J, Veroustraete F (2009) The change of land cover and land use and its impact factors in upriver key regions of the Yellow River. Int J Remote Sens 30:1251–1265. doi:10.1080/01431160802468248
Foody GM (2002) Status of land cover classification accuracy assessment. Remote Sens Environ 80:185–201. doi:10.1016/S0034-4257(01)00295-4
Forman RTT, Godron M (1986) Landscape Ecology. Wiley, New York
Genderen V, Lock BF, Vass PA (1978) Remote sensing: statistical testing of thematic map accuracy. Remote Sens Stat Test Themat Map Accuracy Remote Sens Environ 7:3–14. doi:10.1016/0034-4257(78)90003-2
Giri CP (2012) Remote sensing of land use and land cover: principles and applications. CRC Press, Boca Raton
Giri C, Zhu Z, Reed B (2005) A comparative analysis of the Global Land Cover 2000 and MODIS land cover data sets. Remote Sens Environ 94:123–132. doi:10.1016/j.rse.2004.09.005
Gong W, Yuan L, Fan W, Stott P (2015) Analysis and simulation of land use spatial pattern in Harbin prefecture based on trajectories and cellular automata—Markov modelling. Int J Appl Earth Obs Geoinf 34:207–216. doi:10.1016/j.jag.2014.07.005
Guan D, Li H, Inohae T, Su W, Nagaie T, Hokao K (2011) Modeling urban land use change by the integration of cellular automaton and Markov model. Ecol Model 222:3761–3772. doi:10.1016/j.ecolmodel.2011.09.009
Halmy MWA, Gessler PE, Hicke JA, Salem BB (2015) Land use/land cover change detection and prediction in the north-western coastal desert of Egypt using Markov-CA. Appl Geogr 63:101–112. doi:10.1016/j.apgeog.2015.06.015
Hathout S (2002) The use of GIS for monitoring and predicting urban growth in East and West St Paul, Winnipeg, Manitoba, Canada. J Environ Manag 66:229–238. doi:10.1016/S0301-4797(02)90596-7
Heistermann M, Müller C, Ronneberger K (2006) Land in sight?Achievements, deficits and potentials of continental to global scale land-use modeling Agriculture. Ecosyst Environ 114:141–158. doi:10.1016/j.agee.2005.11.015
Implementation of the 2011 Iranian Population and Housing Census (2011) Statistical Centre of Iran. https://www.amar.org.ir/english/Census-2011. Accessed 19 Aug 2015
Jiang W, Chen Z, Lei X, Jia K, Wu Y (2015) Simulating urban land use change by incorporating an autologistic regression model into a CLUE-S model. J Geog Sci 25:836–850. doi:10.1007/s11442-015-1205-8
Jokar Arsanjani J, Helbich M, Kainz W, Darvishi Boloorani A (2013) Integration of logistic regression, Markov chain and cellular automata models to simulate urban expansion. Int J Appl Earth Obs Geoinformation 21:265–275. doi:10.1016/j.jag.2011.12.014
Jr RGP, Cornell JD, Hall CAS (2001) Modeling the spatial pattern of land-use change with GEOMOD2: application and validation for Costa Rica Agriculture. Ecosyst Environ 85:191–203. doi:10.1016/S0167-8809(01)00183-9
Kamusoko C, Aniya M, Adi B, Manjoro M (2009) Rural sustainability under threat in Zimbabwe—simulation of future land use/cover changes in the Bindura district based on the Markov-cellular automata model. Appl Geogr 29:435–447. doi:10.1016/j.apgeog.2008.10.002
Kharouba HM, Kerr JT (2010) Just passing through: global change and the conservation of biodiversity in protected areas. Biol Conserv 143:1094–1101. doi:10.1016/j.biocon.2010.02.002
Koomen E, Beurden JB-V (2011) Land-use modelling in planning practice. Springer. doi:10.1007/978-94-007-1822-7
Kušová D, Těšitel J, Matějka K, Bartoš M (2008) Biosphere reserves—an attempt to form sustainable landscapes. Landsc Urban Plan 84:38–51. doi:10.1016/j.landurbplan.2007.06.006
Lakide V (2009) Classification of synthetic aperture radar images using particle swarm optimization technique classification of synthetic aperture radar images using particle swarm department of electrical engineering. Rourkela
Lambin EF, Geist H (2006) Land-use and land-cover change: local processes and global impacts. Springer, Berlin
Lambin EF et al (2001) The causes of land-use and land-cover change Moving beyond the myths. Glob Environ Chang 11:261–269. doi:10.1016/S0959-3780(01)00007-3
Lange S (2011) Biosphere reserves in the mountains of the world, excellence in the clouds? Austrian MAB Committee (ed). Austrian Academy of Sciences Press, Vienna
liu X, Yetik IS (2010) A maximum likelihood classification method for image segmentation considering subject variability. In: IEEE Southwest Symposium on Image Analysis and Interpretation, Austin, TX, USA, 23–25 May 2010. Image Analysis and Interpretation (SSIAI), pp 125–128. doi:10.1109/SSIAI.2010.5483903
Liu H, Zhou Q (2004) Accuracy analysis of remote sensing change detection by rule-based rationality evaluation with post-classification comparison. Int J Remote Sens 25:1037–1050. doi:10.1080/0143116031000150004
Lourival R, Watts M, Pressey RL, Mourão GdM, Padovani CR, Silva MPd, Possingham HP (2011) What is missing in biosphere reserves accountability? Nat Conser 9:160–178. doi:10.4322/natcon.2011.022
Luo GP, Zhou CH, Chen X, Li Y (2008) A methodology of characterizing status and trend of land changes in oases: a case study of Sangong River watershed, Xinjiang, China. J Environ Manag 88:775–783. doi:10.1016/j.jenvman.2007.04.003
Martínez ML et al (2009) Effects of land use change on biodiversity and ecosystem services in tropical montane cloud forests of Mexico. For Ecol Manag 258:1856–1863. doi:10.1016/j.foreco.2009.02.023
Memarian H, Kumar Balasundram S, Bin Talib J, Teh Boon Sung C, Mohd Sood A, Abbaspour K (2012) Validation of CA–Markov for simulation of land use and cover change in the Langat Basin, Malaysia. J Geogr Inf Syst 04:542–554. doi:10.4236/jgis.2012.46059
Montesino Pouzols F et al (2014) Global protected area expansion is compromised by projected land-use and parochialism. Nature 516:383–386. doi:10.1038/nature14032
Muller MR, Middleton J (1994) A Markov model of land-use change dynamics in the Niagara Region, Ontario, Canada. Landsc Ecol 9:151–157. doi:10.1007/BF00124382
Nejadi A, Jafari HR, Makhdoum MF, Mahmoudi M (2012) Modeling plausible impacts of land use change on wildlife habitats, application and validation: lisar protected area, Iran. Int J Environ Res 6:883–892
Newbold T et al (2015) Global effects of land use on local terrestrial biodiversity. Nature 520:45–50. doi:10.1038/nature14324
Overmars KP, Verburg PH (2005) Analysis of land use drivers at the watershed and household level: linking two paradigms at the Philippine forest fringe. Int J Geogr Inf Sci 19:125–152. doi:10.1080/13658810410001713380
Pontius RGJ (2000) Pontius—2000—Quantification error versus location error in comparison of categorical maps.pdf. Photogramm Eng Remote Sens 66:1011–1016. doi:0099-1112/00/6608-1011$3.00
Pontius GR, Malanson J (2005) Comparison of the structure and accuracy of two land change models. Int J Geogr Inf Sci 19:243–265. doi:10.1080/13658810410001713434
Pontius RG, Millones M (2011) Death to Kappa: birth of quantity disagreement and allocation disagreement for accuracy assessment. Int J Remote Sens 32:4407–4429. doi:10.1080/01431161.2011.552923
Pontius RG, Shusas E, McEachern M (2004) Detecting important categorical land changes while accounting for persistence Agriculture. Ecosyst Environ 101:251–268. doi:10.1016/j.agee.2003.09.008
Rindfuss RR, Walsh SJ, Turner BL 2nd, Fox J, Mishra V (2004) Developing a science of land change: challenges and methodological issues. Proc Natl Acad Sci USA 101:13976–13981. doi:10.1073/pnas.0401545101
Sang L, Zhang C, Yang J, Zhu D, Yun W (2011) Simulation of land use spatial pattern of towns and villages based on CA–Markov model. Math Comput Model 54:938–943. doi:10.1016/j.mcm.2010.11.019
Saricam S, Erdem U (2012) The importance of biosphere reserve in nature protection and the situation in Turkey, vol 10. The Biosphere. InTech. doi:10.5772/33859
Singh AK (2003) Modelling land use cover changes using cellular Automata in a Geo-spatial environment
Subedi P, Subedi K, Thapa B (2013) Application of a hybrid cellular automaton—Markov (CA–Markov) Model in land-use change prediction: a case study of saddle creek drainage basin, Florida. Appl Ecol Environ Sci 1:126–132. doi:10.12691/aees-1-6-5
Tobler WR (1979) Cellular geography. Philosophy in geography. Theory and decision library. Springer, Netherlands, pp 379–386
Valbuena D, Verburg PH, Bregt AK (2008) A method to define a typology for agent-based analysis in regional land-use research Agriculture. Ecosyst Environ 128:27–36. doi:10.1016/j.agee.2008.04.015
Verburg P, Schot P, Dijst M, Veldkamp A (2004) Land use change modelling: current practice and research priorities. GeoJournal 61:309–324. doi:10.1007/s10708-004-4946-y
Verburg PH, Overmars KP, Huigen MGA, de Groot WT, Veldkamp A (2006) Analysis of the effects of land use change on protected areas in the Philippines. Appl Geogr 26:153–173. doi:10.1016/j.apgeog.2005.11.005
Viera AJ, Garrett JM (2005) Understanding interobserver agreement: the kappa statistic. Fam Med 37:360–363
Vliet Jv (2009) Assessing the accuracy of changes in spatial explicit land use change models. In: Paper presented at the 12th AGILE International Conference on Geographic Information Science, Leibniz Universität Hannover, Germany
Ward DP, Murray AT, Phinn SR (2000) A stochastically constrained cellular model of urban growth Computers. Environ Urban Syst 24:539–558. doi:10.1016/S0198-9715(00)00008-9
Weng Q (2002) Land use change analysis in the Zhujiang Delta of China using satellite remote sensing, GIS and stochastic modelling. J Environ Manag 64:273–284. doi:10.1006/jema.2001.0509
White R, Engelen G (2000) High-resolution integrated modelling of the spatial dynamics of urban and regional systems computers. Environ Urban Syst 24:383–400. doi:10.1016/S0198-9715(00)00012-0
Yang X, Zheng X-Q, Chen R (2014) A land use change model: integrating landscape pattern indexes and Markov-CA. Ecol Model 283:1–7. doi:10.1016/j.ecolmodel.2014.03.011
Ye B, Bai Z (2007) Simulating land use/cover changes of Nenjiang County based on CA–Markov model. Computer And computing technologies in agriculture, vol 258. The International Federation for Information Processing. Springer, Wuyishan, pp 321–329
Yeqiao W, Xinsheng Z (2001) A dynamic modeling approach to simulating socioeconomic effects on landscape changes. Ecol Model 140:141–162. doi:10.1016/S0304-3800(01)00262-
Zebisch M, Wechsung F, Kenneweg H (2004) Landscape response functions for biodiversity—assessing the impact of land-use changes at the county level. Landsc Urban Plan 67:157–172. doi:10.1016/s0169-2046(03)00036-7
Zubair AOM (2006) Change detection in land use and land cover using remote sensing data and Gis (a case study of Ilorin and its environs in Kwara State). University of Ibadan, Ibadan
Acknowledgments
While this study was financially supported by the Iranian National Science Foundation, we would like to give our warmest regards to Mr. S. S. Taheri for his invaluable help during field survey.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Amini Parsa, V., Yavari, A. & Nejadi, A. Spatio-temporal analysis of land use/land cover pattern changes in Arasbaran Biosphere Reserve: Iran. Model. Earth Syst. Environ. 2, 1–13 (2016). https://doi.org/10.1007/s40808-016-0227-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40808-016-0227-2