
Abstract
In this paper, a new control strategy of a variable speed based SEIG wind energy conversion is presented. Nonlinear control strategy is proposed to extract maximum available energy from the wind turbine and regulate the rotor flux magnitude of SEIG and the DC-link voltage in the generator side as well as the load voltage magnitude in the inverter load side under wind speed, load and rotor/stator resistances variations. The proposed nonlinear adaptive controller is robust given its insensitivity to SEIG variation of the rotor and stator resistances. The global convergence and stability analysis taking into account the interconnections between the stator electrical angular position, the rotor flux and rotor resistance estimators and the nonlinear controller have been proved by using the separation principle. Another contribution of this paper is the robustness of the proposed method with respect to the variation of the driven speed and relatively low wind speed operation. Thus, the proposed stand-alone variable speed based SEIG wind energy conversion system can be used in remote and isolated areas where the mean value of the wind speed profile is relatively low.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
1.1 Antecedents and motivations
The self-excited induction generator (SEIG) has emerged from among the well known generators as a suitable candidate to be driven by wind turbine. The main advantages of the SEIG are small size and weight, low cost and simplicity of construction, absence of separate source for excitation and reduced maintenance cost but its main drawback is its inherently poor voltage regulation. The fact that the induction machine (IM) is a multivariable, nonlinear and highly coupled process with time-varying parameters, has motivated a lot of work in the control community during the last decade [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17]. The most popular method is the field-oriented control (F.O.C.) which provides a means to obtain high-performance control of IM. But F.O.C. methodology requires knowledge of the rotor flux which is not usually measured [14]. Traditionally, observers are used to estimate the rotor flux. However, the flux observers used in the currently IM control rely on a good knowledge of the rotor resistance.

Global structure of the control system
It is well known in literature (e.g. see [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17]) that the rotor resistance and the stator resistance may vary up to \(100\%\) and \(50\%\) of their nominal values, respectively, during operation of the IM due to rotor heating. Standard methods for the estimation of IM parameters include the blocked rotor test, the no-load test and the standstill frequency response test. But, these methods cannot be used online during normal operation of the machine. The most natural solution is to online identify the time-varying parameters. The problem of the online identification of the induction machine parameters has been addressed by several papers in the literature [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17].
But in the self-excited generator mode operation of the IM, different approaches for voltage regulation have been developed [18,19,20] without taking into account the fact that the rotor resistance required for the rotor flux estimation is time-varying. In [19] the technique and limitation of varying the flux in the induction generator to regulate the generated voltage under variation of the rotor speed are discussed. In [18], standard sliding mode control associated to the flux oriented control technique is applied to the dc-bus voltage regulation of SEIG. The control strategy proposed in [18] is difficult to implement online because this method used the rotor flux and the rotor resistance which varies with the operating conditions. In [20], fuzzy logic based voltage controller has been proposed for voltage source pulse width modulation (PWM) converter connected to SEIG to regulate the dc-bus voltage. In the above contributions, the investigation of the variation of the electrical parameters (e.g. stator and rotor resistance) has not been discussed.
1.2 Main contributions
In this paper, a new control strategy of a stand-alone variable speed based SEIG wind energy conversion is presented. The main objective of the proposed adaptive nonlinear control strategy is to extract maximum available energy from the wind turbine and regulate the rotor flux magnitude of SEIG and the DC-link voltage in the generator side as well as the load voltage magnitude in the inverter load side under wind speed, load and rotor/stator resistances variations. To this end, adaptive nonlinear controllers are designed. In order to avoid the chattering effect, we used an approximation of the \(\hbox {sign}\) function of the well known sliding mode control technique which has proved to be particularly appropriate for nonlinear systems control, presenting robust features with respect to system parameter uncertainties and external disturbances [21].
The proposed nonlinear adaptive controller is robust given its insensitivity to SEIG variation of the rotor resistance and stator resistance. The global convergence and stability analysis taking into account the interconnections between the stator electrical angular position, the rotor flux and rotor resistance estimators and the nonlinear controller have been proved by using the separation principle. The resulting nonlinear controllers can be easily implemented in practice since finite time estimators for the rotor resistance, rotor flux and stator electrical angular position required for the adaptation of the controller are provided.
Another contribution of this paper is the robustness of the proposed method with respect to the variation of the driven speed and relatively low wind speed operation. Consequently, the proposed stand-alone variable speed based SEIG wind energy conversion system can be used in remote and isolated areas where the mean value of the wind speed profile is relatively low.
1.3 Structure of the paper
The paper is organized as follows. In Sect. 2, global structure and control objective are presented. In Sect. 3, generator side control strategy is described while in Sect. 4, load side inverter control strategy design is introduced. In Sect. 5, simulation results using the proposed nonlinear controller and conventional P.I. controllers are reported and some concluding remarks are given in Sect. 6.
2 Global structure and control objective
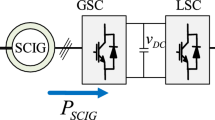
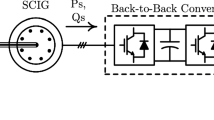
The control structure of a SEIG based variable speed wind turbine is shown in Fig. 1. This structure consists of the SEIG connected to a variable speed wind turbine through a step-up gear box, a PWM controlled converter and a vector controlled PWM voltage source inverter which is used to supply the loads through LC filter. It can be noticed that the output of a variable speed SEIG can not be used without transformation as it varies in amplitude and frequency due to fluctuating wind. Thus, a constant dc-voltage is required for direct use, storage or conversion to AC via an inverter.
Initially, the dc-bus voltage is assumed to be zero and the battery on the dc-bus side of the inverter provides the initial excitation through the diode. When the rotor flux reaches the desired level, the dc-bus voltage increases and becomes greater than the battery voltage; Then the diode cuts off the battery from the dc-bus and the generator supplies itself the necessary energy to control the voltage across the compensator dc-capacitor and the reactive power required by the SEIG is provided by the three-phase control converter.
The goal of this work is to use a simple maximum power point tracking strategy to extract the optimal torque of the variable speed turbine and design the dc-voltage and rotor flux controllers as well as the load side frequency and voltage regulators assuming that the measured outputs are the rotor speed, stator currents, load-side currents and voltages despite large variation of the stator/rotor resistances.
3 Generator side control strategy
The control task in this section is to extract the maximum power from the wind turbine and regulate the rotor flux and the dc-bus voltage.
3.1 Modeling of the wind turbine
The mechanical power extracted from wind turbine can be expressed as:
where \(\rho \) is the air density, R is the radius of the turbine, v is the wind speed, \(C_p(\lambda )\) is the power coefficient and \(\lambda \) is the tip-speed ratio (TSR). This TSR is given by the relation
where \(\omega _{mt}\) is the turbine rotor speed, \(\omega _{m}\) is the generator rotor speed and \({n_g}\) is the gearbox ratio. The general characterization of \(C_p\) depends on \(\lambda \) and the blade pitch angle \(\beta \). In the literature, many authors have proposed different methods to characterize the expression of \(C_p(\lambda )\) [22, 23]. All the analysis in this work is done considering the angle of the blade pitch \(\beta \) settled to zero, i.e. \(\beta \equiv 0\). The following characterization taken from [23] is used.
Maximum power can be extracted from the wind turbine when it operates at maximum \(C_p\) (i.e at \(C_p^*\)) [23]. This is achieved if the rotor speed is kept at an optimal value of the TSR \(\lambda ^*\). The optimal rotor speed can be obtained by solving Eq. (2) for \(\omega _{mt}\):
Therefore, for a given wind speed, the main control objective is to regulate the rotor speed to its optimal value.
The rotor dynamic of wind turbine system is given by:
where \(J_t\) is the turbine total inertia, \(T_t\) is the aerodynamic torque, and f is the turbine total external damping. The wind turbine characteristics used in this work is given in “Appendix 4”.
3.2 Modeling of the induction generator
Assuming that the rotor flux is oriented such the quadrature component \(\phi _{rq}=0\), the dynamic model of the induction generator associated to PWM converter in the synchronously rotating reference frame d and q axis is given by [18, 24]:
The first expression of (9) represents the relation between the stator voltages/ currents electrical angular frequency \(\omega _s\) and the rotor currents electrical angular frequency \(\omega _r\) while the last expression is the stator electrical angular position \(\theta _s\). The notation for the nonlinear dynamics of induction generator is given in “Appendix 7”. The measured variable is \(\omega \), while \((i_{sd},i_{sq})\), \(\phi _r\) and \(R_r\) are not measurable. The control inputs are the stator voltages (\(v_{sd}, v_{sq}\)) and the outputs to be controlled are the rotor flux \(\phi _r\), the generator rotor speed \(\omega _m\) and the dc-voltage \(v_{dc}\) in the dc-side.
Note that the rotor and stator winding resistances are typically uncertain because \(R_r\) and \(R_s\) may vary up to \(100\%\) and \(50\%\) of their nominal values, respectively due to stator and rotor heating.
The following assumptions will be considered until further notice.
-
(i)
The stator current and voltage are bounded signals.
-
(ii)
The rotor resistance \(R_r\in \Omega _{R_r}\), where \(\Omega _{R_r}\) is a compact set of \({\mathbb {R}}\).
-
(iii)
It is also assumed that the rate of variation of the stator/rotor inductances (\(L_m\), \(L_s\), \(L_r\)) and rotor resistance are negligible compared to the dynamic of the stator currents and the rotor flux.
The control objectives of the generator side can be summarized as follows:
-
Achievement of the maximum energy extraction by regulating the the rotor speed to its optimal value,
-
Regulation of the dc-bus voltage and rotor flux,
for any unknown but bounded \(R_r\), despite uncertainties on the stator resistance.
Remark 1
The values of (\(i_{sd},i_{sq}\)) can be computed using the measurements of the stator currents (\(i_{sa},i_{sb},i_{sc}\)), the estimation of the stator electrical angular position \(\theta _s\) and the (a, b, c) coordinate frame \(\rightarrow \) (d, q) coordinate frame transformation. The expression used for the estimation of \(\theta _s\) is given in Sect. 3.4.2 and the (a, b, c) coordinate frame \(\rightarrow \) (d, q) coordinate frame transformation is given in “Appendix 8”.
3.3 Non-adaptive control strategy
Since Eqs. (5) and (8) do not contain the stator voltage explicitly as an input, in the following analysis, some transformations will be done to make the stator voltage components \(v_{sd}\) and \(v_{sq}\) appear explicitly as inputs in both equations.
Under assumptions (i)–(iii), we first compute the second time-derivative of \(\phi _r\) and then use (6) and (8) to derive the dynamic equation for the rotor flux containing the stator voltage component \(v_{sd}\) as a control input. We then obtain
To derive the dynamic equation for the rotor speed containing the stator voltage component \(v_{sq}\) as a control input, let us rewrite (5) as follows.
Since the aerodynamic torque \(T_t\) is not measurable and the control strategy is to derive the controller that ensures optimal torque tracking in finite time, we exploit the work of [25] and replace \(T_t\) in (13) by the following expression:
The dynamic equation for the rotor speed containing the stator voltage component as a control input is derived by computing the second time-derivative of \(\omega _m\) and using (13), (7) and (10). This leads to
Remark 2
Since \(v_{sd}\) and \(v_{sq}\) given by (12) and (15) are responsible for the flux magnitude control and rotor speed control, respectively, the control goals can now be viewed as a decoupling problem.
Assuming that the rate of variation of the rotor flux and rotor speed references signals are negligible compared to other existing dynamics, the rotor flux and rotor speed tracking error dynamics are given by
Under the assumption that the rotor flux and rotor resistance are available, let us choose the switching surfaces [26] (\(c_{\phi _r}>0\) and \(c_{\omega _m}>0\) are tuning parameters)
and the Lyapunov candidate function
whose time-derivative is:
By choosing (\(k_{v_{sd}}\) and \(k_{v_{sq}}\) are positive design parameters)
where
are equivalent control terms [27] and are the unique solutions of \(\dot{s}_{\phi _r}=0\) and \(\dot{s}_{\omega _m}=0\) respectively, the time-derivative of W becomes
Therefore, \(|s_{\phi _r}|\rightarrow 0\) and \(|s_{\omega _m}|\rightarrow 0\) which implies that \(|e_{\phi _r}|\) and \(|e_{\omega _m}|\) converge to zero. Consequently, maximum energy extraction from wind turbine is achieved by virtue of relation (4).
To prove the finite time convergence of \(s_{\phi _r}\) to zero and \(s_{\omega _m}\) to zero, we rewrite (20) as follows
By taking into account (22)–(23) and (24)–(25), we obtain
The above equations can be rewritten as
Thus, there exists finite times \(t_{\phi _r}\) and \(t_{v_{sq}}\) such that inequalities (30)–(31) hold
The reference rotor flux linkage required at any speed is calculated using the relationship between rotor speed and rotor flux linkage as follows [19].
Note that when the rotor speed decreases to a value lower than \(\omega _{m_{min}}\), theoretically the flux linkage should increase to a value higher that \(\phi _{r_{max}}\). However, in an induction machine, once the saturation level is reached, the controller forces more direct axis current \(i_{sd}\) to produce more flux. The magnitude of the exciting current can exceed the rated current of the machine without approaching the required reference flux. As a result the magnitude of the generated voltage drops.
Remark 3
To avoid the effect of the measurement noise, the time-derivatives of \(e_{\phi _r}\) in (18) and \(e_{\omega _m}\) in (19) can be computed using (8) and (5).
Note that the above nonlinear control is not implementable in practice since the slide manifold \(s_{\phi _r}\), the equivalent control terms (24) and (25) are not available due to the fact that the rotor flux and rotor resistance are not online measurable. Furthermore, the stator electrical angular position \(\theta _s\) depends upon the rotor flux and the rotor resistance which is assumed to be unknown time-varying parameter. Consequently, on-line adaptation laws for \(R_r\), \(\theta _s\) and observer for \(\phi _r\) are required to achieve the practical implementation of the above nonlinear controller.
3.4 Adaptive design
In this section, online estimators for the rotor resistance, rotor flux and stator electrical angular position required to achieve the implementation of the above nonlinear controller (22)–(23) are derived.
3.4.1 Rotor resistance estimation algorithm
In our approach, we adopt the dynamics of a balanced induction generator, expressed in a fixed reference frame \(\alpha \)-\(\beta \) attached to the stator [3, 28]:
where \(\gamma _4=L_sL_r-L_m^{2}\).
We can now consider the following observer (\(K>0\) is a constant designed parameter):
where \(u_\alpha \) and \(u_\beta \) are additional signals yet to be designed and \(\hbox {sign}\) is the well known \(\hbox {sign}\) function. The estimated quantities are shown as \({\hat{x}}\) while the error quantities are given as follows \({\tilde{x}}=x-{\hat{x}}\) (e.g., \({\tilde{i}}_{s\alpha }=i_{s\alpha }-{\hat{i}}_{s\alpha }\), \({\tilde{i}}_{s\beta }=i_{s\beta }-{\hat{i}}_{s\beta }\), \({\tilde{i}}_{r\alpha }=i_{r\alpha }-{\hat{i}}_{r\alpha }\), \({\tilde{i}}_{r\beta }=i_{r\beta }-{\hat{i}}_{r\beta }\), \({\tilde{R}}_r=R_r-{\hat{R}}_r\)).
The dynamics of the observer error can be computed using (33)–(36) and (37)–(40) as
To achieve the design of the rotor resistance identifier the following additive assumption is required.
Assumption (iv) It is assumed that the following rotor resistance identifiability condition holds:
By considering the following Lyapunov candidate function
and computing its time-derivative along the trajectories of (41) and (42), we obtain
From (47), by taking into account assumptions (i) and (ii), the following inequalities hold:
Assuming that the estimate \({\hat{R}}_r\), \({\hat{i}}_{r\alpha }\), and \({\hat{i}}_{r\beta }\) are bounded,Footnote 1 let positive constants \(\xi _{\alpha }\) and \(\xi _{\beta }\) be available such that
where \(|.|_m\) denotes the maximum value of |.|. By choosing
the derivative of \(V_1\) will be negative definite \(\forall \) \({\tilde{i}}_{s\alpha }\ne 0\) and \({\tilde{i}}_{s\beta }\ne 0\). Therefore, the observer errors \({\tilde{i}}_{s\alpha }\) and \({\tilde{i}}_{s\beta }\) converge to 0 in finite time if the gain K is chosen such that condition (51) is satisfied.
Remark 4
Since the rotor signals are not measurable in the case of squirrel cage induction machine, the gain K in (51) can be selected by trial and error method.
We now consider the following quadratic function of the rotor current observer error and rotor resistance estimation error:
Its time-derivative along the trajectories of (43) and (44) yields
If we choose \(u_{\alpha }\), \(u_{\beta }\) and \(\dot{{\tilde{R}}}_r\) as follows (\(K_{R_r}\) is a designed parameter):
\(\dot{V}_2\) becomes
Consequently, under the identifiability condition (45) and if the auxiliary variables \(u_{\alpha }\), \(u_{\beta }\) and \(\dot{{\tilde{R}}}_r\) are chosen as in (54), \(\dot{V}_2\) will be negative definite \(\forall {\tilde{i}}_{r\alpha }\ne 0\), \(\forall {\tilde{i}}_{r\beta }\ne 0\) and \(\forall {\tilde{R}}_r\ne 0\). Thus, \({\hat{i}}_{r\alpha }\), \({\hat{i}}_{r\beta }\) and \({\hat{R}}_r\) converge in finite time to their nominal values \(i_{r\alpha }\), \(i_{r\beta }\) and \(R_r\) with the convergence rate \(\frac{L_sR_r}{\gamma _4}\) and \(K_{R_r}\), respectively.
Remark 5
If \(\displaystyle K_{R_r}>\frac{L_sR_r}{\gamma _4}\), the rotor resistance convergence will be faster than that of the rotor current. In contrary, if \(\displaystyle K_{R_r}<\frac{L_sR_r}{\gamma _4}\), the rotor current convergence will be faster than that of the rotor resistance. The case \(\displaystyle K_{R_r}=\frac{L_sR_r}{\gamma _4}\) is difficult to implement in practice since \(R_r\) is assumed to be unknown and is time-varying but verifies in normal operation of the SEIG \(R_{r_{min}}\le R_r\le R_{r_{max}}\).
To achieve the design of the rotor resistance estimator, implementable expression for \({\tilde{R}}_r\) is required. Under condition (51), a sliding-mode occurs in finite time on the manifold
The equivalent injection terms [27] can be computed by solving the equation
Consequently, (41) and (42) can be rewritten as
where \(W_{\alpha eq}=K \hbox {sign}({\tilde{i}}_{s\alpha })\) and \(W_{\beta eq}=K \hbox {sign}({\tilde{i}}_{s\beta })\). The expressions of the equivalent injection terms can be deduced from (58) and (59) but these expressions cannot be implemented in practice since \({\tilde{i}}_{r\alpha }\), \({\tilde{i}}_{r\beta }\) and \({\tilde{R}}_r\) are not available.Footnote 2 To overcome this problem, the equivalent injection terms are approximated using first order low-pass filters as in [27]. If the design parameter \(K_{R_r}\) is chosen such that
the rotor current convergence will be faster than that of the rotor resistance. Under this assumption and identifiability condition (45), the implementable expression of the rotor resistance estimation error \({\tilde{R}}_r\) can be derived from (58) and (59) by neglecting the terms containing the rotor current estimation error. We then obtain
Finally, the overall simplified rotor resistance estimator can be summarized as follows:
3.4.2 Rotor flux and stator electrical angular position estimation algorithms
Rotor flux observer design
Let us now consider the following observer for \(\phi _r\)
and let \({\tilde{e}}_{\phi _r}=\phi _r-{\hat{\phi }}_r\) be the rotor flux observer error. By taking into account (8), the observer error dynamic equation may be computed as follows:
From the fact that \({\tilde{R}}_r\) converges to the neighborhood of 0 in finite time, the observer error \({\tilde{e}}_{\phi _r}\) converges to the neighborhood of 0 which immediately implies that \({\hat{\phi }}_r\) converges to \(\phi _r\).
Stator electrical angular position estimation algorithm
Assuming that the estimates of the rotor resistance and rotor flux converge in finite time to their nominal values, the estimation of the stator electrical angular position can be achieved by using (9) as follows.
Remark 6
The proposed adaptive nonlinear control is not a direct current control. To limit the reference value of \(v_{sd}\) and \(v_{sq}\) (which implicitly limits the current reference value), saturated functions have been used. However, in the practice, the SEIG based system should be equipped with a fast over current protection unit.
3.5 Global convergence and stability analysis
To achieve the global convergence and stability analysis, let us recall the non-adaptive nonlinear controller (22)–(23):
where
Note that it has been proved in section 3.3 that the above non-adaptive controller achieves finite time convergence of the tracking errors to zero of the rotor speed and rotor flux of SEIG associated to PWM converter.
In practice, the adaptive controller is used because the rotor flux \(\phi _r\) is not measurable and the observer of the rotor flux depends up-on the rotor resistance \(R_r\) which is assumed to be unknown time-varying parameter. In addition, the equivalent terms (68)–(69) and the stator electrical angular position \(\theta _s\) require the knowledge of the rotor flux and rotor resistance. In this case, \(\theta _s\), \(R_r\) and \(\phi _r\) are substituted in the above non-adaptive controller by their estimates.
The global convergence and stability analysis taking into account the interconnections between \(R_r\), \(\phi _r\) and \(\theta _s\) estimators and the nonlinear controller are based on the separation principle theorem. The finite-time convergence of the estimation algorithms allows to design the estimators and the nonlinear control law separately, i.e., the separation principle is satisfied [29, 30]. The only requirement for its implementation is the boundedness of the states of the system [assumptions (i)–(iii), the identifiability condition (45), conditions (51) and (60)] in the operational domain.
3.6 DC-link voltage control strategy design
In order to regulate the dc-link voltage, an electronic load controller (ELC) is proposed. This ELC consists of an insulated gate bipolar transistor IGBT operating as a chopper connected in series with a dump load resistance \(R_L\). This dump load is designed such that when the duty cycle of the chopper is unity (during fault or over-generation), it should consume the maximum output power of the generator. The dump load can be a heater load or a battery charging load. Using the power balance principle, the dynamic behavior of the dc-bus voltage is given by [31]
where \(P_{in}\) is the input power of the inverter. We rewrite (70) as follows.
The expression for the DC-link voltage control of \(v_{dc}\) can be easily computed as in the case of \(\phi _r\) and \(\omega _m\) control strategy (Sect. 3.3) as follows
4 Load side inverter control strategy design
The control objective in the load side inverter is the regulation of the AC load voltage magnitude. Note that the frequency of the load voltages and currents is imposed by the frequency of the load \(\omega _e\) used in the (a, b, c) coordinate frame \(\rightarrow \) (d, q) coordinate frame transformation.
4.1 Modeling of voltage source inverter and LC filter
The voltage source inverter is connected to the AC load through an LC filter. In the synchronously rotating reference frame d and q axis, the voltage equations are given by [31]:
The notation for the above nonlinear dynamics is given in “Appendix 7”. The methodology used to obtain the filter parameters is described in [32] and is given in “Appendix 8”.
Assuming that the load side inverter currents in the synchronously rotating reference frame d and q axis are constants, the equations used for the derivation of the control law in this section can be computed using the differentiation of (76) and (77) combined with (74) and (75). This leads to:
Assuming that the load side voltage reference values in the synchronously rotating reference frame d and q axis are constants, the expressions for the load side inverter control of \(v_d\) and \(v_q\) can be easily computed as in the case of \(\phi _r\) and \(\omega _m\) control strategy (Sect. 3.3) as follows
where
Remark 7
To reduce the chattering phenomenon on the proposed controllers, the sign function has been approximated as [33]
The structure of the proposed nonlinear controllers is depicted in Fig. 2.

Structure of the proposed adaptive nonlinear controllers
4.2 Controller parameters tuning
It is worth observing that, in order to increase the tracking performance of the above controllers, a rigorous methodology for the optimal tuning of the controller design parameters is required. However, it is difficult to define such a methodology, since the overall adaptive control is nonlinear with time-varying adaptive parameters. In this section, some guidelines for the selection of controller parameter values (i.e. \(c_{\omega _m}\), \(c_{\phi _r}\), \(k_{v_{sq}}\), \(k_{v_{sd}}\) in Sect. 3.3) are given.
The following considerations have to be taken into account.
-
\(c_{\omega _m}\) and \(c_{\phi _r}\) should be chosen sufficiently smaller than the frequency (in rad/s) of the lowest unmodeled dynamics.
-
the larger \(c_{\omega _m}\), \(c_{\phi _r}\), \(k_{v_{sq}}\) and \(k_{v_{sd}}\), the worse the effect of noise present in the input of the adaptive controller;
-
in real-time implementation using DSP, \(c_{\omega _m}\) and \(c_{\phi _r}\) should be chosen sufficiently smaller than the sampling frequency (in rad/s).
Hence the values of \(c_{\omega _m}\), \(c_{\phi _r}\), \(k_{v_{sq}}\) and \(k_{v_{sd}}\) should be chosen using the above guidelines in order to obtain a trade-off between the signal content preservation and the noise reduction.
5 Simulation results
The effectiveness of the proposed nonlinear controller (NC) has been verified by numerical simulations within the Matlab/Simulink environment software with sampling time of \(40\mu ~s\). This sampling time is real-time implementable using actual commercial DSP1104 [34]. The parameters of the induction machine, generator side converter and load side inverter used in the simulation are given in “Appendices 1, 2 and 3”, respectively.
Two sets of simulation have been performed. For comparison, these simulations have been performed using both nonlinear controllers and conventional P.I regulators. The structures of the P.I regulators are given in Figs. 3 and 4.

Structure of the PI regulators in the generator side

Structure of the PI regulators in the load side
In all simulations, the capacitive load RC, inductive load RL, and the RLC load have been applied at time \(t=0\,\mathrm{s}\), \(t=1.5\mathrm{s}\) and \(2.5\,\mathrm{s}\), respectively. The values of the different loads have been chosen as follows.
Capacitive load RC: \(R=150\Omega \), \(C=30\,\mathrm{mF}\). Inductive load RC: \(R=150\Omega \), \(L=50\,\mathrm{mH}\). Combined inductive-capacitive load RLC: \(R=150\Omega \), \(L=50\,\mathrm{mH}\), \(C=30\,\mathrm{mF}\). The frequency of the load is \(\omega _e=100\pi \).
The tuning parameters of the nonlinear controllers selected according to the procedure described in Sect. 4.2, have been chosen as follows.
Rotor flux magnitude and rotor speed controllers gains: \(c_{\omega _{m}}=200\), \(k_{v_{sq}}=30\), \(c_{\phi _r}=300\) and \(k_{v_{sd}}=50\). DC-link voltage regulation gains: \(k_{i_{dc}}=2\) and \(k_{p_{dc}}=10\).
Load side inverter nonlinear controllers gains: \(c_{v_{d}}=10\), \(k_{v_d}=10\), \(c_{v_q}=20\) and \(k_{v_q}=10\). The gains of the rotor resistance identifier are \(K=50\) and \(K_{R_r}=35\). The equivalent injection terms have been approximated using first order low-pass filter with time-constant of \(3.5\,\mathrm{ms}\) and the \(\text{ sign }\) function in the controller (66)–(67) has been approximated using (84) with \(\epsilon =0.01\). Note that the value of \(K_{R_r}\) verifies condition (60) since \(\frac{L_sR_{rmin}}{L}=128.2\,\mathrm{s}^{-1}\). The initial value of \(\theta _s\) is \(0.01~\mathrm{rad}\). The parameters of the LC filter used in the load side inverter are: \(L_f=40\,\mathrm{mH}\), \(C_f=10\,\upmu F\) and \(R_f=0.1\Omega \).
The tuning parameters of the PI regulators selected according to the procedure described in “Appendix 5”, have been chosen as follows.
Generator converter side
Rotor flux regulator: \(k_{p\varphi _r}=110\), \(k_{i\varphi _r}=1660\).
Rotor speed regulator: \(k_{p\omega _m}=4\), \(k_{i\omega _m}=1\).
Stator current components \(i_{sd}\) and \(i_{sq}\) regulators: \(k_{pi_{sd}}=k_{pi_{sq}}=100\), \(k_{ii_{sd}}=k_{ii_{sq}}=600\).
Grid inverter side
Load voltage direct axis component PI regulators gains: \(k_{pv_d}=0.45\), \(k_{iv_d}=1.2\), \(k_{pi_{d}}=10\) and \(k_{ii_{d}}=5\).
Load voltage quadrature axis component PI regulators gains: \(k_{pv_q}=10\), \(k_{iv_q}=5\), \(k_{pi_{q}}=5\) and \(k_{ii_{q}}=2.5\).
To verify the effectiveness and robustness of the proposed method, all simulations have been carried out with SEIG driven by variable wind speed turbine and under noise condition when the magnitude of the noise reaches about \(3.75\%\) of the maximum values of the measurable stator currents (Figs. 5, 6, 7, 8, 9, 10, 11, 12, 13, 14).

First set of simulation: Comparative performances when the stator resistance is assumed to be constant under online variation of the rotor resistance (variation starts at time \(t=1\,\mathrm{s}\) and reaches \(100\%\) at time \(t=2\,\mathrm{s}\)). a DC-bus voltage (i), rotor flux magnitude (ii), and rotor resistance (iii). b Wind speed (i), rotor speed (ii), and power coefficient (iii)

First set of simulation: Comparative performances when the stator resistance is assumed to be constant under online variation of the rotor resistance (variation starts at time \(t=1\,\mathrm{s}\) and reaches \(100\%\) at time \(t=2\,\mathrm{s}\)). a DC-bus voltage regulation error (i), rotor flux magnitude tracking error (ii) and rotor speed tracking error (iii). b d-axis load voltage component (i), and q-axis load voltage component (ii), d-axis load voltage component regulation error (iii)

First set of simulation: Performance when the stator resistance is assumed to be constant under online variation of the rotor resistance (variation starts at time \(t=1\,\mathrm{s}\) and reaches \(100\%\) at time \(t=2\,\mathrm{s}\)). a Control signal during transient periods in the case of the NC (i, ii and iii); control signal during transient periods in the case of the PI regulator (i, ii and iii). b SEIG stator current component \(i_{sa}\) in the case of the NC (i); SEIG stator current component \(i_{sa}\) in the case of the PI regulator (ii)

First set of simulation: Performance when the stator resistance is assumed to be constant under online variation of the rotor resistance (variation starts at time \(t=1\,\mathrm{s}\) and reaches \(100\%\) at time \(t=2\,\mathrm{s}\)). a Load voltage component \(v_a\) during transient periods in the case of the NC (i and ii); load voltage component \(v_a\) during transient periods in the case of the PI regulator (i and ii). b Load current component \(i_a\) during transient periods in the case of the NC (i and ii); load current component \(i_a\) during transient periods in the case of the PI regulator (i and ii)

First set of simulation: Performance when the stator resistance is assumed to be constant under online variation of the rotor resistance (variation starts at time \(t=1\,\mathrm{s}\) and reaches \(100\%\) at time \(t=2\,\mathrm{s}\)). a Zoom in Fig. 5a, iii for \(R_r\), zoom of the rotor current component \({\hat{i}}_{r\alpha }\) and zoom in Fig. 5b, iii for \(C_p\) during transient periods. b Zoom in Fig. 6a
In the first set of simulation, the stator resistance is assumed to be constant while the rotor resistance is assumed to be time-varying. This variation starts at time \(t=1\,\mathrm{s}\) and reaches \(100\%\) of the nominal value of \(R_r\) at time \(t=2\,\mathrm{s}\). The results are depicted in Figs. 5, 6, 7, 8, 9 and 10.
It can be noticed from these figures the good performance of the proposed nonlinear control and the poor performance of the P.I regulators under online variation of the rotor resistance and when the wind speed varies from 9 to \(6.5~\mathrm{m/s}\) at time \(t=3.5\,\mathrm{s}\). The steady state errors obtained when the wind speed varies from 9 to \(6.5~\mathrm{m/s}\) at time \(t=3.5\,\mathrm{s}\) show that the results obtained using the nonlinear controller are more precise than those provided by PI regulators. During transient periods, the performance obtained using PI regulators exhibits higher overshoot values than the performance provided by the nonlinear controllers (Figs. 9b, 14b). One can also notice that the convergence times of the rotor current and rotor resistance are 0.015, and \(0.14\,s\), respectively. Thus the assumption that the rotor current convergence must be faster than the convergence time of the rotor resistance is satisfied. Under load variations, both controllers provided good performance as shown in Figs. 6b and 12b. One can also notice that the control signal value in the case of the PI regulators is greater than the value obtained in the case of the adaptive nonlinear control when rotor resistance variation occurs at time \(t=1\,\mathrm{s}\) and when the wind speed varies from 9 to \(6.5~\mathrm{m/s}\) at time \(t=3.5\,\mathrm{s}\).

First set of simulation: Performance when the stator resistance is assumed to be constant under online variation of the rotor resistance (variation starts at time \(t=1\,\mathrm{s}\) and reaches \(100\%\) at time \(t=2\,\mathrm{s}\)). Estimate of the electrical angular frequency \(\omega _s\) during transient (i, ii and iii) required for the implementation of both nonlinear control and PI regulators in the generator side
In the second set of simulation, the performance of both controllers under \(50\%\) variation of the stator resistance (this variation occurs at time \(t=2.5\,\mathrm{s}\)) has been investigated while the rotor resistance is assumed to be time-varying as in the first set of simulation. In this case, the obtained results are shown in Figs. 11, 12, 13 and 14.
The remarks made for the previous case are also valid for the present case. It can be noticed the robustness of both controllers with respect to stator resistance variation.
The convergence times of the estimation of the rotor current component, the rotor resistance, rotor flux, stator angular position (via the electrical angular frequency \(\omega _s\)) and the convergence time of the rotor speed and dc-link voltage have been estimated during the start-up period of the control system in the generator side and are given in Table 1 (all these convergence times are taken from the initial start-up time \(t_0=0\)). From this table, one can notice that the convergence time of the rotor speed (\(0.04\,\mathrm{s}\)) is less than the convergence time of the rotor resistance (\(0.14\,\mathrm{s}\)) due to the robustness of the proposed control with respect to parameter uncertainties. The convergence time of the proposed control algorithm is the maximum convergence time of the control outputs (convergence time of the dc-link voltage: \(0.11\,\mathrm{s}\)).
Finally, the comparative results show globally that the nonlinear control algorithm provided better performance than the P.I regulators in the generator side control strategy while in the load side inverter control strategy, both nonlinear controller and P.I regulators achieved satisfactorily performance.

Second set of simulation: Comparative performances under online variation of the rotor resistance (variation starts at time \(t=1\,\mathrm{s}\) and reaches \(100\%\) at time \(t=2\,\mathrm{s}\)) and \(50\%\) stator resistance variation at \(t=2.5\,\mathrm{s}\). a DC-bus voltage (i), rotor flux magnitude (ii), and rotor resistance (iii). b Wind speed (i), rotor speed (ii), and power coefficient (iii)

Second set of simulation: Comparative performances under online variation of the rotor resistance (variation starts at time \(t=1\,\mathrm{s}\) and reaches \(100\%\) at time \(t=2\,\mathrm{s}\)) and \(50\%\) stator resistance variation at \(t=2.5\,\mathrm{s}\). a DC-bus voltage regulation error (i), rotor flux magnitude tracking error (ii) and rotor speed tracking error (iii). b d-axis load voltage component (i), and q-axis load voltage component (ii), load voltage magnitude regulation error (iii)

Second set of simulation: Comparative performances under online variation of the rotor resistance (variation starts at time \(t=1\,\mathrm{s}\) and reaches \(100\%\) at time \(t=2\,\mathrm{s}\)) and \(50\%\) stator resistance variation at \(t=2.5\,\mathrm{s}\). a Control signal during transient periods in the case of the NC (i, ii and iii); Control signal during transient periods in the case of the PI regulator (i, ii and iii). b SEIG stator current component \(i_{sa}\) in the case of the NC (i); SEIG stator current component \(i_{sa}\) in the case of the PI regulator (ii)

Second set of simulation: Comparative performances under online variation of the rotor resistance (variation starts at time \(t=1\,\mathrm{s}\) and reaches \(100\%\) at time \(t=2\,\mathrm{s}\)) and \(50\%\) stator resistance variation at \(t=2.5\,\mathrm{s}\). a Zoom in Fig. 11a, iii for \(R_r\), zoom of the rotor current component \({\hat{i}}_{r\alpha }\) and zoom in Fig. 11b, iii for \(C_p\) during transient periods. b Zoom in Fig. 6a
6 Conclusion
In this paper, a new control strategy of a stand-alone variable speed based SEIG wind energy conversion has been investigated. Maximum extraction of available energy from the wind turbine and regulation of the rotor flux magnitude and DC-link voltage in the generator side as well as the regulation of the load voltage magnitude in the inverter load side under wind speed, load and rotor/stator resistances variations have been achieved using adaptive nonlinear controller and PI regulators. Comparative results show globally that the nonlinear control algorithm provided better performance than the P.I regulators in the generator side control strategy while both nonlinear controller and P.I regulators achieved satisfactorily performance in the load side inverter control strategy. Finally, the proposed stand-alone variable speed based SEIG wind energy conversion systems can be used in remote and isolated areas where the mean value of the wind speed profile is relatively low.
Notes
The proof of the boundness will be given later.
\(R_r\) is assumed to be unknown and \({i}_{r\alpha }\) and \({i}_{r\beta }\) are not measurable.
References
Marino R, Peresada S, Tomei P (1995) Exponentially convergent rotor resistance estimation for induction motors. IEEE Trans. Ind. Electron. 42:508–515
Ahmed-Ali T, Lamnabhi-Lagarrigue F, Ortega R (1999) A globally-stable adaptive indirect field-oriented controller for current-fed induction motors. Int. J. Control 72:996–1005
Marino R, Peresada S, Tomei P (2000) On-line stator and rotor resistance estimation for induction motors. IEEE Trans. Control Syst. Technol. 8:570–579
Akatsu K, Kawamura A (2000) On-line rotor resistance estimation using the transient state under the speed sensorless control of induction motor. IEEE Trans. Power Electron. 15:553–560
Castaldi P, Geri W, Montanari M, Tilli A (2005) A new adaptive approach for on-line parameter and state estimation of induction motors. Control Eng. Pract. 13:81–94
Marino R, Peresada S, Verrelli CM (2005) Adaptive control for speed-sensorless induction motors with uncertain load torque and rotor resistance. Int. J. Adapt. Control Signal Process 19:661–685
Barut M, Bogosyan S, Gokasan M (2005) Speed sensorless direct torque control of induction motors with rotor resistance estimation. Energy Convers Manag 46:335–349
Picardi C, Scibilia F (2006) Sliding-mode observer with resistances or speed adaptation for field-oriented induction motor drives. IEEE Ind Electron IECON 2006:1481–1486
Koubaa Y (2006) Application of least-squares techniques for induction motor parameters estimation. Math Comput Model Dyn Syst 12:363–375
Koubaa Y (2006) Asynchronous machine parameters estimation using recursive method. Simul Model Pract Theory 14:1010–1021
Mezouar A, Fellah MK, Hadjeri S, Sahali Y (2006) Adaptive speed sensorless vector control of induction motor using singularly perturbed sliding mode observer. IEEE Ind Electron IECON 2006:932–939
Castillo B, Gennaro SD, Loukianov A, Rivera J (2007) Robust nested sliding mode regulation with application to induction motors. In: Proceedings of the 2007 American control conference, New York City, USA, pp 5242–5247
Roncero-Sánchez P, García-Cerraba A, Feliu-Batlle V (2007) Rotor resistance estimation for induction machines with indirect field-orientation. Control Eng Pract 15:1119–1133
Wang K, Chiasson J, Bodson M, Tolbert LM (2007) An online rotor time constant estimator for the induction machine. IEEE Trans Control Syst Technol 15:339–348
Mezouar A, Fellah MK, Hadjeri S (2008) Adaptive sliding-mode-observer for sensorless induction motor drive using two-time-scale approach. Simul Model Pract Theory 16:1323–1336
Kenne G, Ahmed-Ali T, Lamnabhi-Lagarrigue F, Arzandé A (2008) Nonlinear systems time-varying parameter estimation: application to induction motors. Electr Power Syst Res 78:1881–1888
Kenné G, Lamnabhi-Lagarrigue F (2012) Comparative study of two robust online rotor resistance estimators for induction machine adaptive control. In: Proceedings of the IEEE international conference on industrial technology, special session paper, Athens-Greece, 19–21 March, 2012, pp 437–442
Louze L, Nemmour AL, Khezzar A, Hacil ME, Boucherma M (2009) Cascade sliding mode controller for self-excited induction generator. Rev Energies Renouv 12:617–626
Seyoum D, Rahman MF, Grantham C (2003) Inverter supplied voltage control system for an isolated induction generator driven by a wind turbine. In: 38th IAS annual meeting conference record of the industry applications, vol 1, pp 568–575
Sivakami P, Karthigaivel R, Selvakumaran S (2013) Voltage control of variable speed induction generator using pwm converter. Int J Eng Adv Technol 2:2249–8958
Benelghali S, Benbouzid ME Hachemi, Charpentier JF, Ahmed-Ali T, Munteanu I (2011) Experimental validation of a marine current turbine simulator: application to a permanent magnet synchronous generator-based system second-order sliding mode control. IEEE Trans Ind Electron 58:118–126
Slootweg J, de Haan S, Polinder H, Kling W (2003) General model for representing variable speed wind turbines in power system dynamics simulations. IEEE Trans Power Syst 18:144–151
Jaramillo-Lopez F, Kenne G, Lamnabhi-Lagarrigue F (2016) A novel online training neural network-based algorithm for wind speed estimation and adaptive control of pmsg wind turbine system for maximum power extraction. Renew Energy 86:38–48
Mansour M, Nejib Mansouri M, Faouzi Mimouni M (2011) Comparative performance of fixed-speed and variable-speed wind turbine generator systems. J Mech Eng Autom 1:74–81
Beltran B, Ahmed-Ali T, Benbouzid M (2009) High-order sliding mode control of variable speed wind turbines. IEEE Trans Energy Convers 56:3314–3321
Slotine JJ, Li W (1991) Applied nonlinear control. Prentice Hall, New York
Utkin VI (1992) Sliding modes in optimization and control. Springer, Berlin
Leonhard W (1984) Control of electric drives. Springer, Berlin
Levant A (1998) Robust exact differentiation via sliding mode technique. Automatica 34:379–384
Kenne G, Ahmed-Ali T, Lamnabhi-Lagarrigue F, Arzande A, Vannier JC (2011) An improved rotor resistance estimator for induction motors adaptive control. Electr Power Syt Res 81:930–941
Haque M, Negnevitsky M, Muttaqi K (2008) A novel control strategy for a variable speed wind turbine with a permanent magnet synchronous generator. In: 2008 IEEE industry applications society annual meeting, pp 1–8
Liserre M, Blaadjerg F, Hansen S (2005) Design and control of an LCL-filter-based three-phase active rectifier. IEEE Trans Ind Appl 41:1281–1291
Beltran B, Ahmed-Ali T, Benbouzid M (2008) Sliding mode power control of variable speed wind energy conversion. IEEE Trans Energy Convers 23:551–558
Bouafassa A, Rahmani L, Mekhilef S (2015) Design and real time implementation of single phase boost power factor correction converter. ISA Trans 55:267–274
Shibashis B, van Zyl A, Spée R, Johan HRE (1997) Sensorless current control for active rectifiers. IEEE Trans Ind Appl 33:765–773
Delaleau E, Louis JP, Ortega R (2001) Modeling and control of induction motors. Int J Appl Math Comput Sci 11:105–129
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Induction machine parameters [19]
Power: \(3.5~\mathrm{kw}\); Rated speed: \(1450~\text{ rpm }\); Rated field current: \(7.8~\mathrm{A}\); \(n_p=2\); \(L_r=L_s=191.4~\text{ mH }\); \(L_m=180~\text{ mH }\); \(R_s=1.66~\Omega \); \(R_r=2.75~\Omega \).
Appendix 2: Parameters of the generator side converter
Switching frequency: \(6~\text{ kHz }\); DC link capacitor: \(2000~\mu \text{ F }\)
Appendix 3: Parameters of the load side inverter
Switching frequency: \(6~\text{ kHz }\); \(R_f=0.1\Omega \), \(C_f=10\upmu \text{ F }\) and \(L_f=40\text{ mH }\).
Appendix 4: Wind turbine characteristics
Density of air \(\rho =1.225\), Area swept by blades, \(A=19.635\,\mathrm{m}^2\), Optimum coefficient, \(k_{op}=0.0037 \mathrm{Nm/(rad/s)}^{2}\), \(C_{pmax}=0.48\), Cut-in wind speed \(v_{min}=3.5\,\mathrm{m/s}\), Cut-out wind speed \(v_{max}=25\,\mathrm{m/s}\), Gearbox ratio \(n_g=\frac{\omega _m}{\omega _{mt}}=6.25\), Turbine total inertia, \(J_t=3\,\mathrm{kg}\,\mathrm{m}^2\), Turbine total external damping, \(f=0.0027 \,\mathrm{Nm/(rad/s)}\).
Appendix 5: Method for the determination of PI controller parameters
1.1 Design of the rotor flux PI regulators
The open loop transfer function of the subsystem described by (8) is given by:
where \(s=d/dt\) is the Laplace operator.
Two PI regulators are required to regulate the rotor flux. The first regulator provides the reference stator current component \(i_{sd}^*\) while the second one is used for the control of the stator current component \(i_{sd}\). Let us denote \(C_{\phi _r}(s)\) the transfer function of the first PI regulator. Its expression is:
where \(k_{p\phi _r}\) and \(k_{i\phi _r}\) are positive tuning gains. The open loop transfer function \(G_{{OC}_{\phi _r}}(s)\) taking into account the PI regulator is:
The compensation of the pole of \(G_{{OC}_{\phi _r}}(s)\) by the zero of the PI regulator yields
The closed-loop transfer function \(F_{{OC}_{\phi _r}}(s)\) can be computed as:
The above closed-loop transfer function represents a standard first-order system with time-constant \(\tau _{\phi _r}=\frac{L_r}{R_rL_mk_{p\phi _r}}\).
It is well known that after three time constants, the first-order unit step response is within 95 percent of its steady state value. Thus the settling time \(t_{S(5\%)}\) typically defined to be the time at which the response enters and remains within a \(\pm 5\) percent band about the steady-state value can be approximated in the case of first-order system by
Consequently, given a desired settling time \(t_{S_{\phi _r}(5\%)}\), from (88) and (91), we can deduce the expressions for \(k_{p\phi _r}\) and \(k_{i\phi _r}\) as:
The same procedure can be applied to design the second PI regulator for the rotor flux control loop and others PI regulators used in this work.
Appendix 6: Relation between the nominal value \(v_{{dc}_n}\) and the nominal line-to-line RMS supply voltage \(v_{n_{sac}}\)
This relation is given by [35]:
The application of this relation to the control system used in this work yields:
The reference value of the \(v_{dc}\) verifies the following inequality.
In this work, the reference value of \(600\,\mathrm{V}\) has been used.
Appendix 7: System nomenclature
- \(\phi _r=\phi _{rd}\) :
-
Rotor flux magnitude (Wb)
- \(i_{sd}\),\(i_{sq}\) :
-
Stator currents components in in (d, q) coordinate frame (A)
- \(v_{sd}\), \(v_{sq}\) :
-
Stator voltages in (d, q) coordinate frame (V)
- \(n_p\) :
-
Number of pole pairs
- \(\omega \) :
-
Rotor electrical angular frequency (rad/s)
- \(\omega _m=\omega /n_p\) :
-
Mechanical rotor speed (rad/s)
- \(\omega _s\) :
-
Electrical angular frequency of the voltages and currents of stator windings (rad/s)
- \(\omega _r\) :
-
Electrical angular frequency of the currents of rotor windings (rad/s)
- \(\theta _s\) :
-
Stator electrical angular position (rad)
- \(R_r,R_s\) :
-
Rotor and stator resistances (\(\Omega \))
- \(L_r,L_s\) :
-
Rotor and stator inductances (H)
- \(L_m\) :
-
Mutual inductance (H)
- \(R_L\) :
-
Dump load resistance (\(\Omega \))
- C :
-
DC-link capacitor (F)
- \(i_i\) :
-
Current at the input of the inverter (A)
- \(v_{dc}\) :
-
DC-link voltage (V)
- \(T_e\) :
-
Electromagnetic torque (Nm)
- \(i_{s\alpha }\), \(i_{s\beta }\) :
-
Stator currents components in \((\alpha ,\beta )\) coordinate frame (A)
- \(i_{r\alpha }\), \(i_{r\beta }\) :
-
Rotor currents components in \((\alpha ,\beta )\) coordinate frame (A)
- \(v_{s\alpha }\), \(v_{s\beta }\) :
-
Stator voltages components in \((\alpha ,\beta )\) coordinate frame (V)
- S :
-
Switching functions of PWM technique of Electronic Load Control (ELC)
- \(S_a\), \(S_b\) and \(S_c\) :
-
Switching functions of PWM technique
- \(S_d\), \(S_q\) :
-
Switching functions of PWM technique in (d, q) coordinate frame
- \(\omega _e\) :
-
Pulsating frequency of the AC load (rad/s)
- \(v_{id}\), \(v_{iq}\) :
-
Inverter output voltages components in (d, q) coordinate frame (V)
- \(v_{d}\), \(v_{q}\) :
-
AC load voltages components in (d, q) coordinate frame (V)
- \(i_{id}\), \(i_{iq}\) :
-
Inverter output currents components in (d, q) coordinate frame (A)
- \(i_{Ld}\), \(i_{Lq}\) :
-
Load currents components in (d, q) coordinate frame (A)
- \(R_f\) :
-
LC-filter resistor in Inverter side (\(\Omega \))
- \(L_f\) :
-
LC-filter inductor in Inverter side (H)
- \(C_f\) :
-
LC-filter capacitor in Inverter side (F)
- \(x^*\) :
-
Reference signals for x.
Appendix 8
(a, b, c) coordinate frame \(\rightarrow \) \((\alpha ,\beta )\) coordinate frame equations [36].
\((\alpha ,\beta )\) coordinate frame \(\rightarrow \) (d, q) coordinate frame equations.
(d, q) coordinate frame \(\rightarrow \) \((\alpha ,\beta )\) coordinate frame equations.
\((\alpha ,\beta )\) coordinate frame \(\rightarrow \) (a, b, c) coordinate frame equations.
Appendix 9
Design methodology for LC filter.
The transfer function of the second order low pass LC filter is
The cut-off angular frequency of this filter is:
The cut-off frequency is then equal to:
The values of the LC filter can be chosen such that the central frequency of the first harmonic packet to be eliminated is equal to \(5f_0\).
Rights and permissions
About this article

Cite this article
Kenne, G., Sanjong, C.T., Fotso, A.S. et al. A robust control strategy for a self-excited induction generator wind turbine system. Int. J. Dynam. Control 6, 300–318 (2018). https://doi.org/10.1007/s40435-016-0285-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-016-0285-3