
Abstract
In this paper, a novel adaptive interval type-2 fuzzy active sliding mode control (AIT2FASMC) approach is proposed for synchronization of fractional-order hyper-chaotic systems. The synchronization is achieved in front of uncertainties facing the fuzzy logic controller (FLC) in fractional–order hyper-chaotic systems such as uncertainties in control outputs, uncertainties in inputs to the fuzzy logic controller, and linguistic uncertainties. Two fractional-order hyper-chaotic systems can be synchronized based on Lyapunov stability theorem by using direct AIT2FASMC approach. Also, the proposed method reduces the chattering phenomena in the control signal, significantly. This novel fractional-order sliding mode controller is proposed for robust stabilization/synchronization problem of a class of fractional-order hyper-chaotic systems in the presence of external noise. Type-2 fuzzy active sliding mode control \(\left( {FASMC}\right) \) have the ability to overcome the limitations of type-1 FASMC when system is corrupted by high levels of uncertainty. Finally, the proposed approach is applied to two identical and non-identical fractional-order hyper-chaotic systems when the slave system is perturbed by external noise. Simulation results show applicability and feasibility of the proposed finite-time control strategy.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
In recent years, dynamics described by fractional differential equations are becoming more and more popular as the underlying facts about the differentiation and integration is significantly different from the integer counterparts. Also, many actual systems are described better by fractional-order differential equations. In the literatures, it is investigated that the description of some systems is more desirable when the fractional derivative is used [1, 2]. Nowadays, many fractional-order chaotic systems have been investigated, such as the fractional-order Chua’s system [3] and the fractional-order Chen’s system [4]. Although chaotic systems have deterministic behavior, they are extremely sensitive to initial conditions, changing the parameters and difficult to predict. In the synchronization problem, the output of the maser system is used to control the slave system so that the output of the slave system follows the output of the master system asymptotically. The study of chaos synchronization has become an interesting topic in the nonlinear dynamics field. Researchers in this field have explored a variety of problems on chaos synchronization such as: the stability conditions for chaos synchronization and the applications of chaos synchronization. For example, two coupled identical chaotic Rössler systems are used to study the full synchronization for time-continuous chaotic systems in [5], and the conditions of transverse stability for the fully synchronized chaotic state is established. In recent years, the design of finite-time control approach has been considered, such as [6], which allows solving the finite-time stabilization problems. Finite-time stabilization offers an effective solution for fast response, high tracking precision and disturbance-rejection properties of a control system [7]. Many progressed theories have been developed for controlling chaos such as optimal control [8], adaptive control [9], adaptive fuzzy control [10], sliding mode control [11], adaptive sliding mode control [12], and fuzzy sliding mode control [13]. Due to the limit of physical devices and the effect of interference (such as noise, temperature, etc.), uncertainties are un-avoidable in a real control system. The general framework of fuzzy reasoning allows facing much of this uncertainty, type-1 fuzzy systems employ sets, which represent uncertainty by numbers in the limit of [0, 1]. In recent years, it is shown that type-1 fuzzy systems have problems in modeling and minimizing the effect of rule and data uncertainties. Therefore, type-2 fuzzy sets, which are characterized by fuzzy membership functions have been investigated in the literatures [14, 15]. When a signal is uncertain, like a measurement, it is difficult to obtain its exact value [16]. However, if we have a higher degree of uncertainty in the problem, in this case another type of fuzzy sets that are able to undertake this high levels of uncertainty could be used; these sets called type-2 fuzzy sets [17]. The concept of type-2 fuzzy set is proposed by Zadeh (1965) as an extension of the concept of type-1 fuzzy sets [18]. The grades of membership functions are themselves fuzzy sets. Fuzzy type-2 theory is capable of undertaking four major types of uncertainties involved with type-1 fuzzy system [19]. The effect of uncertainty in a system can be reduced by employing type-2 fuzzy logic because this logic offers better capabilities to undertake linguistic uncertainties by modeling vagueness and unreliability of information [20]. Likewise, there is a record of some experimental document showing some improvements in terms of accuracy of fuzzy models of type-2 over their type-1 counterparts [21, 22]. There have been a lot of applications of type-2 fuzzy set in intelligent control [23–25], pattern recognition [26], intelligent manufacturing [22], and so on.
In [27–29], active sliding mode controller is used to synchronize two different chaotic systems. Sliding mode control (SMC) can cause chattering phenomenon, which excite high-frequency dynamics of the closed loop system [30–32].
There are two problems that are usually seen as obstacles affecting the wide spread application of SMC, despite the advantages of robustness and simplicity. First, the system parameters are precisely unknown and are perturbed during application. Mathematically, it is impossible to model a practical system perfectly because always some un-modeled dynamics exists. Furthermore, the challenging problem is how to design an effective SMC with unknown dynamics of the entire system [33]. The second problem is that SMC generally suffers from the chattering. This problem is a motion oscillating around the prescribed switching surfaces.
There are some advantages which make our proposed method attractive.
-
The main advantage of our work is that it can overcome the undesirable chattering phenomena in the classic sliding mode control.
-
Using fractional-order Lyapunov function, an adaptive finite-time sliding mode control is designed to guarantee existence of sliding motion to the origin in finite-time.
-
The globally asymptotic stability of the closed-loop system is mathematically proved.
-
The proposed adaptive fuzzy sliding mode controller is capable to reject high level of uncertainties and external noise.
-
The proposed method can be applied for synchronization of both identical and non-identical fractional-order hyper-chaotic systems.
-
\(D^{q}s_{i}\) is used as input of interval type-2 fuzzy instead of \(\dot{s}_{i}\), because the fractional rate of sliding surface perhaps is capable of providing extra flexibility in the design of conventional FLC.
The rest of this paper is organized as follows. In Sect. 2, some preliminaries of fractional calculus are presented. The system description and problem statement are given in Sect. 3. Section 4 gives brief description of interval type-2 fuzzy logic system. Sliding mode controller scheme is investigated in Sect. 5. Section 6 gives two illustrative examples and simulation results. Finally, concluding remarks are included in Sect. 7.
2 Basic definition of fractional calculus
Fractional calculus is a mathematical field with more than 300 years of history. These mathematical phenomena allow us to describe and model a real object more accurately than the classical “integer” methods. Fractional calculus denoted by \({}_{a} D_{t}^{q}\) . This operator is a notation for taking both the fractional integral and derivative in an expression defined as
In the literature, different definitions of fractional differ-integral are used [34–39], The three most common forms are as follow
The Grünwald–Letnikov (GL) definition:
where
If \(n=\frac{t-a}{h}\), where a is a real constant, which expresses a limit value, we can write
The Riemann–Liouville (RL) definition:
The Caputo’s definition:
where \(m-1<q<m\) and \(\varGamma \) is the Gamma function.
This consideration is based on the fact that for a wide class of functions, the three best known definitions-GL, RL, and Caputo- are equivalent under some conditions.
The numerical simulation of a fractional differential equation is not simple as ordinary differential equation. In this paper, we choose the fractional Adams–Bashforth–Moulton method as a representative numerical scheme [40].
In order to explain this method, the following differential equation is considered
The differential Eq. (6) is equivalent to Volterra integral equation which is as follows
Now, set \(h=T/N\), \(t_{n}=nh\), \(n=0,1,\ldots ,N\). The integral equation can be discretized as
where
and
The error of this approximation is described as follows
where, \(p=min\left( {2,1+q}\right) \)
In the rest of this paper, the operator \(D^{q}\) is generally called the “Caputo differential operator of order q”.
3 Problem formulation and system description
The two n-dimensional master and slave fractional-order chaotic systems can be defined in the following general form
Master system:
Slave system:
where \(x=\left[ {x_{1}, x_{2}, \ldots ,x_{n}} \right] ^{T}\in R^{n\times 1}\), is the vector of the states of the master system. \(y=\left[ {y_{1}, y_{2}, \ldots ,y_{n}} \right] ^{T}\in R^{n\times 1}\) and \(n\left( t\right) =\left[ {n_{1}\left( t\right) ,n_{2}\left( t\right) ,\ldots ,n_{n}\left( t\right) } \right] ^{T}, \left| {n_{i}\left( t\right) } \right| \le \Delta _{i},\,i=1,2,\ldots ,n\) are the vectors of the states and the external noise of the slave system, respectively. \(f_{i}\left( {x,t}\right) \) and \(g_{i}\left( {y,t}\right) \), \(i=1,2,\ldots ,n\) are continuous smooth nonlinear functions and \(u\left( t\right) =\left[ {u_{1}\left( t \right) , u_{2}\left( t\right) , \ldots ,u_{n}\left( t\right) } \right] ^{T}\in R^{n\times 1}\) is the vector of the control inputs to be designed later.
The control problem is to force the slave system to track an n-dimensional master system, on \(\left[ {t_{0}, \infty }\right) \) in finite-time. The tracking error is defined by
The control goal considered in this paper is that for any given target orbit \(x_{i}\left( t\right) ,i=1,2,\ldots ,n \), a controller is designed such that the tracking error vector satisfies
where \(\Vert \cdot \Vert \) is the Euclidean norm of a vector.
4 Brief description of interval type-2 fuzzy logic system
Fuzzy logic systems (FLSs) are known as the universal approximators. FLSs have different applications in identification and control design. A type-1 fuzzy system consists of four major parts: fuzzifier, rule base, inference engine, and defuzzifier.
Type-2 fuzzy sets (T2 FSs) and systems are a generalization of type-1 fuzzy sets and systems that can handle more uncertainty. From the beginning of fuzzy sets, criticism was made that there is no uncertainty in the membership function of a type-1 fuzzy set and it has contradict the word fuzzy.
Figure 1 represents the schematic diagram of an IT2 FLS. It is like its \({ T1}\) equivalent; but the main difference is that at least one of the FSs in the rule base is an IT2 FS. Therefore, the outputs of the inference engine are IT2 FSs, and a type-reducer is required before defuzzification to convert them into a T1 FS.

Schematic diagram of an IT2 FLS
Due to the complexity of the type reduction, the general type-2 FLS becomes computationally intensive.
General type-2 FLSs are computationally intensive because type-reduction is very intensive. Things simplify a lot when secondary membership functions (MFs) are interval sets (in this case, the secondary memberships are either zero or one and we call them interval type-2 sets) and this is the case studied in this paper. The interval type-2 Gaussian membership function (MF) with uncertain mean \(m\in \left[ {m_1, m_{2}} \right] \) and a fixed deviations \(\left( \sigma \right) \) is depicted in Fig. 2. It is clear that the type-2 fuzzy set is in a region bounded by an upper MF and a lower MF denoted as \(\bar{\mu }_{\tilde{A}} \left( x\right) \) and \(\underline{\mu }_{\tilde{A}} \left( x\right) \), respectively, and is called a foot of uncertainty (FOU).

Interval type-2 Gaussian membership function
By employing singleton fuzzification, the singleton inputs are fed into the inference engine. By combination of if-then rules, the inference engine maps the singleton input \(x=\left[ {x_{1},x_{2},\ldots ,x_{n}} \right] \) into a type-2 fuzzy set as the output.
Consider the rule base of an IT2 FLS, which consist of M rules, supposing the following form
and the firing strength \(F^{i}\) for the i-th rule can be an interval type-2 set described as
where
There are many methods in order to apply type-reduction to combine \(F^{i}\left( x\right) \) and the related consequent rules. The most commonly used one is the center-of-sets type-reducer [41].
The firing sets \(F^{i}\left( x\right) =\left[ {\underline{f}^{i}\left( x\right) \overline{f^{i}} \left( x \right) } \right] \) computed in inference engine are combined with the left and right centroids of consequents, and then the defuzzified output is organized by finding the solutions of the following optimization problems
\(y_{l}\) and \(y_{r}\) can be calculated employing the Karnik–Mendel (KM) algorithm [42]. The main idea of the KM algorithm is to find the switch points for \(y_{l}\) and \(y_{r}\).
So the defuzzified crisp output from an IT2FLS is as follows
5 Sliding mode controller design
The control problem is to drive tracking error vector asymptotically to the origin for any initial condition of master and slave systems \((x_{0}=x\left( {t_{0}}\right) , y_{0}=y\left( {t_{0}}\right) )\), given at an initial time \(t_{0}\). Let a sliding hyper plane H defined as follows
where
In (17), \(\alpha _{i}>0\) and \(\beta _{i}\) is not zero which are chosen such that dynamic of the sliding surface converge to zero quickly. The sliding mode process can be classified into two phases, approaching phase with \(s_{i}\left( t\right) \ne 0\) and sliding phase with \(s_{i}\left( t\right) =0\). A sufficient condition to guarantee that the trajectory of the synchronization error vector \(e_{i}\) will move from approaching phase to sliding phase, is to design the control effort such that sliding condition
is satisfied. During the sliding phase, we have \(s_{i}\left( t \right) =0\) and \(\dot{s}_{i} \left( t\right) = 0\). If \(f_{i}\left( {x,t}\right) \) and \(g_{i}\left( {y,t}\right) \) are known and free of external noise, \(n_{i}\left( t\right) =0\), the corresponding equivalent control effort \(u_{eq_{i}}\) to force the dynamics of the system to stay on the sliding surface can be obtained from \(\dot{s}_{i} \left( t\right) = 0 \).
Using (5), one can obtain
From (17) and (19), the sliding dynamic obtain as
By subtracting (12) from (13), we have equivalent control law as
In the reaching phase, in order to satisfy the sliding condition (18), a switching control action \(u_{sw_{i}} \left( t\right) \) must be added to (21) and the overall sliding mode control law can be expressed as follows
where \(\mu _{i}\) and \(k_{i}\) are positive parameters. To obtain the sliding mode control (22), the system functions \(f_{i}\left( {x,t} \right) \), \(g_{i}\left( {y,t}\right) \) must be known in advance, but in real application these are unknown and also noise exists \(n_{i}\left( t\right) \ne 0\). The sign function in reaching control will make the control input to produce chattering phenomenon. To overcome this difficulty, an Interval Type-2 Fuzzy Logic Controller (IT2FLC) is applied. The proposed scheme is described in detail in the following section. Also, the adaptive rule for \(k_{i} , \;i=1,2,\ldots ,n\) is derived by direct Lyapunov theorem.
5.1 IT2FLC design for the reaching phase
The dynamic behavior of a type-2 fuzzy controller is characterized by a set of linguistic rules. From this set of rules, the inference methodology of FLC will be able to provide appropriate control action. We can establish \(U_{r_{i}}\) by \(s_{i}\) in fuzzy sliding mode control. The reaching law for our proposed control methodology is selected as follow
where \(k_{fsmc_{i}}\) is the normalization factor of the output variable, and \(u_{fsmc_{i}}\) is the output of the Fuzzy ASMC (FASMC), which is established by the normalized values of \(s_{i}\) and \(D^{q}s_{i}\).
The type-2 membership functions used for the input variables \(s_{i}\) and \(D^{q}s_{i}\), and the output membership function \(u_{fsmc_{i}}\) are shown in Figs. 3 and 4, respectively. The fuzzy control rules provide the map between input linguistic variables to output linguistic variable \( u_{fsmc_{i}}\). The fuzzy rule table was designed in Table. 1.

Type-2 membership functions for the input variables

Type-2 membership functions for the output variable
Lemma 1
The following inequality is holds
Proof
According to (5) and (25), \(0<q<1\) then \(-1<q-1<0\). So from (5), we conclude that \(m=0\).
Therefore one can obtain
From (25) and (26), and suppose \(f\left( t\right) =sgn\left( {s_{i}\left( t\right) }\right) \), where \(0<\tau <t\) then \(\left( {t-\tau }\right) >0 \) and \(\varGamma \left( {1-q}\right) >0\). Then we can conclude that [43, 44]
Therefore we have
Therefore, \(\left[ {-\mu _{i}s_{i}\left( t\right) D^{q-1}sgn\left( {s_{i}\left( t\right) }\right) } \right] \) is negative semi-definite.
Hence, the proof is achieved completely. \(\square \)
Lemma 2
The following inequality is holds
Proof
As the same in Lemma 1, from (5), \(-1<q-1<0\). From (26) and (29), we have
Therefore we have
Hence, \(-\hat{K}_{i}s_{i}\left( t \right) D^{q-1}s_{i}\left( t\right) \) is negative semi-definite and the proof is completed. \(\square \)
Assumption 1
We assume the following inequality is holds
This assumption is used in the next subsection for Lyapunov stability analysis.
5.2 Adaptation law synthesis
In order to estimate the unknown parameter of the controller \(k_{i}\), appropriate adaption law is derived as follow:
If the fractional-order chaotic system of this paper is controlled by the continuous control law \(u_{i}\left( t\right) \) in (22) with the adaptation law obtained in this section, then the system trajectories will converge to the sliding surface \(s_{i}\left( t \right) =0\).
Proof
Consider a positive definite function as Lyapunov function candidate as follows:
where \(k_{i}\) is the estimated value of \(\hat{k}_{i}\), and \(\tilde{K}_{i}=\hat{k}_{i}-k_{i}\) is the estimation error. Also \(\delta _{i}\) is learning rate.
Taking the fractional-order derivative of both sides of (34) and using the Lemma 1 in [45] yields
By taking a fractional-order derivative from (17) and substituting into (35), one can obtain
Subtracting (12) from (13) and substituting into (36), results
Substituting (22) into (37), then we have
Introducing the adaptation law (33) in (39), we have
According to Lemma 1 and Assumption 1, we can conclude
If we assume \(\left( {\Delta _{i}-\emptyset _{i}}\right) \le -h_{i}\), where \(h_{i}\) is a positive constant, then
Therefore, according to Lemma 2, the right hand side of inequality (42) is negative semi-definite. So the stability of the system is guaranteed.
The block diagram of proposed adaptive interval type-2 fuzzy active sliding mode controller is shown in Fig. 5. \(\square \)

Block diagram of proposed adaptive interval type-2 fuzzy active sliding mode controller
6 Simulation example
In this section, two illustrative examples are presented to show the feasibility and applicability of the proposed adaptive interval type-2 fuzzy active sliding mode control approach and to confirm the theoretical results. The proposed adaptive interval type-2 fuzzy active sliding mode controller is applied to synchronize two identical and non-identical uncertain fractional-order hyper-chaotic systems in the presence of external noise.
6.1 Numerical simulation for two identical fractional-order hyper-chaotic systems
Let us consider two identical uncertain fractional-order hyper-chaotic systems [46], the master system and the slave system, as follow
The master system:
and the slave system:
Here, we suppose the initial conditions of the master and slave systems as: \(x\left( 0\right) =\left( {x_{1}\left( 0 \right) ,x_{2}\left( 0\right) ,x_{3}\left( 0\right) ,x_{4}\left( 0 \right) }\right) ^{T}=\left( {1,2,0.5,0.8}\right) ^{T}\), \(y\left( 0 \right) =\left( {y_{1}\left( 0\right) ,y_{2}\left( 0 \right) ,y_{3}\left( 0\right) ,y_{4}\left( 0\right) } \right) ^{T}=\left( {1.8,1.2,3.5,0.3}\right) ^{T}\). Also, the parameters of the sliding surface are chosen as, \(\alpha _{i}=20 , i=1,...,4\) and \( \beta _{i}=0.1, i=1,...,4\). \(n_{i}\left( t\right) , i=1,...,4\) is supposed by mean of 0 and variance of 0.5. According to [46], the fractional-order operator q is chosen 0.97 to ensure the system (43) shows hyper-chaos which has two positive Lyapunov exponents. The design parameter used in (23) is chosen as \(k_{fsmc_{i}}= 2\), \(i=1,...,4\). The learning rates are \(\delta _{1}=15 ,\delta _{2}=25 , \delta _{3}=21 , \delta _{4}=26\).
The state trajectories of the master and slave systems are shown in Fig. 6. The synchronization errors between two identical fractional-order hyper-chaotic systems are illustrated in Fig. 7. Also, the time response of the adaptive controller parameter \(k_{i}, \;i=1,\ldots ,4\) are depicted in Fig. 8.

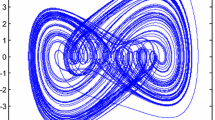
State trajectories of the master and slave fractional-order hyper-chaotic systems

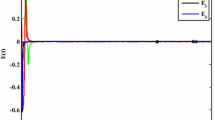
Synchronization errors of two identical fractional-order hyper-chaotic systems

Time response of the adaptive controller parameter (k)
Figure 7 shows that, the synchronization errors between two fractional-order hyper-chaotic systems reduce significantly in finite-time which is less than one second. Also Fig. 8 shows the adaptive parameter of the controller remain constant after one second which indicates that the synchronization errors converge to zero.
6.2 Numerical simulation for two non-identical fractional-order hyper-chaotic systems
Let us consider two non-identical uncertain fractional-order hyper-chaotic systems [46]. The master and slave systems are as follow
The master system:
and the slave system:
The initial conditions of the master and the slave systems and the parameters of the sliding surface and controller are chosen as Sect. 6.1. The state trajectories of the master and slave systems are shown in Fig. 9. The synchronization errors between two non-identical fractional-order hyper-chaotic systems are illustrated in Fig. 10. Also, the time response of the adaptive controller parameter \(k_{i}, i=1,\ldots ,4\) are depicted in Fig. 11.

State trajectories of the master and slave fractional-order hyper-chaotic systems

Synchronization errors of two non-identical fractional-order hyper-chaotic systems

Time response of the adaptive controller paremeter (k)
7 Conclusion
In this paper, adaptive interval type-2 FASMC is proposed for chaos synchronization between two identical and non-identical fractional-order hyper-chaotic systems with external noise and internal uncertainties where the structure of the controller is partially unknown. On the basis of Lyapunov stability theory, a finite-time control scheme was developed and an interval type-2 fuzzy logic system was used to present a novel scheme, which could overcome the chattering phenomenon, while maintaining the finite-time characteristics. Also, during the time, the synchronization errors reduce significantly. The mathematical proof demonstrated that the closed-loop system was global asymptotic stable. All the theoretical results are verified by numerical simulation to demonstrate the effectiveness of the proposed synchronization scheme.
References
Ross B (1974) Fractional calculus and its applications. Lecture Notes Math. Springer, Berlin
Ross B (1975) Fractional calculus and its applications. Lecture Notes Math 457:37–79
Petras I (2008) A note on the fractional-order Chua’s system. Chaos Solitons Fract 38:140–147
Lu JG, Chen G (2006) A note on the fractional-order Chen system. Chaos Solitons Fract 27:685–688
Yanchuk S, Maistrenko Y, Mosekilde E (2003) Synchronization of time-continuous chaotic oscillators. Chaos: an interdisciplinary. J Nonlinear Sci 13:388–400
Baht SP, Bernstein DS (2000) Finite-time stability of continuous autonomous systems. SIAM J Control Optim 38:751–766
Orlov Y (2005) Finite-time stability and robust control synthesis of uncertain switched systems. SIAM J Control Optim 43:1253–1271
Hugues-Salas O, Banks SP (2008) Optimal control of chaos in nonlinear driven oscillators via linear time-varying approximations. Int J Bifurcation Chaos 18:3355–3374
Hua C, Guan X (2004) Adaptive control for chaotic systems. Chaos Solitons Fract 22:55–60
Chen B, Liu X, Tong S (2007) Adaptive fuzzy approach to control unified chaotic systems. Chaos Solitons Fract 34:1180–1187
Chang JF, Hung ML, Yang YS, Liao TL, Yan JJ (2008) Controlling chaos of the family of Rössler systems using sliding mode control. Chaos Solitons Fract 37:609–622
Mohadeszadeh M, Delavari H (2015) Synchronization of fractional-order hyper-chaotic systems based on a new adaptive sliding mode control. Int J Dynam Control. doi:10.1007/s40435-015-0177-y
Nagarale RM, Patre BM (2014) Exponential function based fuzzy sliding mode control of uncertain nonlinear systems. Int J Dynam Control. doi:10.1007/s40435-014-0117-2
Castillo O, Melin P (2008) Intelligent systems with interval type-2 fuzzy logic. Inform Control 4:771–784
Li C, Yi J, Zhao D (2009) Design of interval type-2 fuzzy logic system using sampled data and prior knowledge. ICIC Express Lett 3:695–700
Zadeh LA (1975) The concept of a linguistic variable and its application to approximate reasoning. Inform Sci 9:43–80
Castillo O, Melin P, Tsvetkov RT, Atanassov K (2015) Short remark on fuzzy sets, interval type-2 fuzzy sets, general type-2 fuzzy sets and intuitionistic fuzzy sets. Intell Syst 322:183–190
Zadeh LA (1975) The concept of a linguistic variable and its application to approximate reasoning-I. Inform Sci 8:199–249
Gomide Fernando AC (2003) Uncertain rule-based fuzzy logic systems introduction and new directions. Fuzzy Sets Syst 133:133–135
Wagenknecht M, Hartmann K (1988) Application of fuzzy sets of type-2 to the solution of fuzzy equations systems. Fuzzy Sets Syst 25:183–190
Castro JR, Castillo O, Melin P, Rodriguez-Diaz A (2009) A hybrid learning algorithm for a class of interval type-2 fuzzy neural networks. Inform Sci 179:2175–2193
Dereli T, Baykasoglu A, Altun K, Durmusoglu A, Turksen IB (2011) Industrial applications of type-2 fuzzy sets and systems. Comput Ind 62:125–137
Castillo O, Aguilar LT, Cazarez-Castro NR, Cardenas S (2008) Systematic design of a stable type-2 fuzzy logic controller. Appl Soft Comput 8:1274–1279
Hagras H (2004) Hierarchical type-2 fuzzy logic control architecture for autonomous mobile robots. Fuzzy Syst 12:524–539
Hsiao M, Li THS, Lee JZ, Chao CH, Tsai SH (2008) Design of interval type-2 fuzzy sliding-mode controller. Inform Sci 178:1686–1716
Mendoza O, Melin P, Castillo O (2009) Interval type-2 fuzzy logic and modular neural networks for face recognition applications. Appl Soft Comput 9:1377–1387
Deng WH, Li CP (2005) Chaos synchronization of the fractional Lü system. Phys A 353:61–72
Chen G, Ueta T (1999) Yet another chaotic attractor. Int J Bifurcation Chaos 9:1465–1466
Li CP, Chen G (2003) A note on hopf bifurcation in Chen’s system. Int J Bifurcation Chaos 6:1609–1615
Deng WH, Li CP (2005) Synchronization of chaotic fractional chen system. J Phys Soc Jpn 74:1645–1648
Utkin VI (1977) Variable structure systems with sliding mode. IEEE Trans Autom Control 22:212–222
Slotine JJE (1984) Sliding controller design for non-linear systems. Int J Control 40:421–434
Yu X, Kaynak O (2009) Sliding-mode control with soft computing. IEEE Trans Ind Electron 56:3275–3285
Podlubny I (1999) Fractional differential equations. Academic Press, New York
Uchaikin V (2013) Fractional derivatives for physicists and engineers. Nonlinear physical science. Springer, Berlin
Ortigueira M (2011) Fractional calculus for scientists and engineers. Lecture notes in electrical engineering. Springer, Netherlands
Kilbas AA, Srivastava HM, Trujillo JJ (2006) Theory and applications of fractional differential equations. Elsevier Science Inc, New York
Baleanu D, Machado JAT, Luo ACJ (2012) Fractional dynamics and control. Springer, New York
Caponetto R et al (2010) Fractional-order systems: modeling and control applications. World Scientific, Singapore
Diethelm K, Ford NJ, Freed AD (2004) Detailed error analysis for a fractional Adams method. Numer Algorithms 36:31–52
Ziegler JG, Nichols NB (1942) Optimum settings for automatic controllers. Trans ASME 64:759–768
Mendel JM (2004) Computing derivatives in interval type-2 fuzzy logic systems. Fuzzy Syst 12:84–98
Monje A, Chen YQ, Vinagre BM et al (2010) Fractional-order systems and controls. Springer, New York
Ortigueira M, Machado JA (2015) What is a fractional derivative? J Comput Phys 293:4–13
Aguila-Camacho N, Duarte-Mermoud MA, Gallegos JA (2014) Lyapunov functions for fractional-order systems. Commun Nonlinear Sci Numer Simul 19:2951–2957
Matouka AE, Elsadany AA (2014) Achieving synchronization between the fractional-order hyper-chaotic novel and chen systems via a new nonlinear control technique. Appl Math Comput 29:30–35
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Mohadeszadeh, M., Delavari, H. Synchronization of uncertain fractional-order hyper-chaotic systems via a novel adaptive interval type-2 fuzzy active sliding mode controller. Int. J. Dynam. Control 5, 135–144 (2017). https://doi.org/10.1007/s40435-015-0207-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-015-0207-9