
Abstract
In this paper, a class of integer and fractional-order chaotic systems, which undergoes external disturbances and system uncertainties, are considered. A robust synchronization scheme that incorporates a sliding mode controller established on a new fractional-order surface. A fractional order derivative provides an additional degree of freedom in the sliding surface. After that, the stability analysis for closed loop system is studied. Then, based on a Lyapunov function candidate an adaptive switching gain is derived which make the controller capable to bring the synchronizing error to zero without any disturbance exerted upon the stability. The proposed method is designed for a wide class of chaotic systems. Furthermore, the results are extended for fractional-order version of chaotic systems. The proposed controller can be used to both integer and fractional order chaotic systems. The design is simple with rigorous stability analysis. Several numerical simulations are provided to verify the effectiveness of the theoretical results.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Chaos is an interesting phenomenon that has gained wide attention in many areas of engineering. The fundamental characteristic of a chaotic system is its sensitive dependence on initial conditions; which means, a small shift in the initial states can lead to extraordinary perturbation in the system states [1]. Discovery of chaos goes back to times when Lorenz was simulating the weather models [2]. Lorenz found a 3-dimensional autonomous system, which could exhibit two-scroll chaos attractor. Now, there are many systems reported in the literature related to chaotic behavior and chaos synchronization [3–15].
Since the concept of master-slave synchronization for coupled chaotic systems was proposed in [16], much attention has been paid on control and synchronization of chaotic systems due to its potential applications in secure communication, biological systems, information science, etc., [17–27]. Many approaches are proposed to deal with this problem such as adaptive control [28–30], sliding mode control [31–33], active control [34–37], optimal control [38] and backstepping design [39, 40]. Notice that in practice there are always some unknown factors, which affect the chaotic systems and deteriorate the performance of synchronization schemes. Thus, it is better to implement robust controllers to realize synchronization.
Fractional calculus is a 300-years-old topic. However, applying fractional-order calculus to dynamic systems control is just a recent focus of interest. In fact, during the last years, fractional calculus has been used increasingly for control systems; its ability has been recognized in improving the performance of controllers especially in the area of robust control.
Most of the above-mentioned strategies guarantee the asymptotic stability of the resulted synchronization error dynamic. It means that, the state trajectories of the slave system can reach to the state trajectories of the master system within an infinite settling time. However, in practical application it is more valuable to synchronize master–slave chaotic systems in a given finite time.
With the above motivations, in this paper we investigate application of fractional-order sliding mode control for robust synchronization of chaotic systems. Sliding mode control is a control method for robustly control of uncertain systems [41]. It provides both advantages of sliding mode and fractional-order controllers simultaneously. The idea behind this control strategy is utilizing fractional-order sliding surfaces instead of traditional ones. Several comparative studies are reported in the recent literature, which have stated that fractional-order sliding mode outperforms conventional sliding mode controllers [42–46]. The proposed fractional adaptive sliding mode controller has the advantage of combining the tracking facilities of the adaptive control with the robustness of the sliding mode control.
However, most of the above-mentioned researches on chaos synchronization have focused on fractional-order or integer-order chaotic systems. To the best of our knowledge, there has been very little information about the control methods which can be used for both fractional-order and integer-order chaotic systems.
There are some advantages, which make our proposed method attractive. First, a novel fractional active sliding surface is presented in this paper. Fractional order derivative makes the more degree of freedom in sliding surface. Second, our proposed method can be used for both fractional-order and integer-order chaotic systems. It can also be used for both identical and non-identical chaotic systems. Third, the method is designed for a wide class of chaotic systems, which means its universal applicability. Fourth, the proposed method synchronizes master–slave chaotic systems in a given finite time.
In spite of intensive researches, the stability of fractional-order systems remains an open problem. Stability of fractional order nonlinear dynamic systems are studied in [47, 48]. LMI stability conditions for fractional order systems are investigated in [49]. In [50] an extension of Lyapunov–Krasovskii theorem for the fractional nonlinear systems is proposed. An extension of Lyapunov direct method for fractional-order systems using Bihari’s and Bellman–Gronwall’s inequality and a proof of comparison theorem for fractional-order systems are proposed in [51].
We develop our controller design in such a way that stability of the closed-loop system can be studied easily. We show that our proposed method can guarantee the system asymptotic stability for both integer-order and fractional-order chaotic systems in the presence of system uncertainties and external disturbances. Numerical simulations are verifying our theoretical results.
This paper is organized as follows: in Sect. 2 basic definitions of fractional calculus are included. Section 3 deals with controller design for synchronization of integer-order chaotic systems. Synchronization of fractional-order systems is presented in Sect. 4 and finally, the concluding remarks are given in Sect. 4.3.
2 Fractional calculus
Let us first introduce definitions and results needed here with respect to fractional calculus which will be used later.
Definition 1
The fractional integral \(\mathbf{I}_{0,\mathrm{t}}^\mathrm{q}\) with fractional order \(q\in R^{+}\) of function \(f(t)\) is defined as
In this definition, the initial time is set to zero.
Definition 2
The Riemann–Liouville derivative of fractional order \(q\in R^{+}\) with function \(f(t)\) is defined as
where \(m-1<q<m\in R^{+}\).
Definition 3
The Caputo derivative of fractional order \(q\in R^{+}\) with function \(f(t)\) is defined as
where \(m-1<q<m\in R^{+}\) [52].
Theorem 1
[47, 48] Let \(x = 0\) be an equilibrium point for either Caputo or Riemann–Liouville fractional non-autonomous system
where \(f(x,t)\) satisfies the Lipschitz condition with Lipschitz constant \(l> 0\) and \(\alpha \in (0,1)\). Assume that there exists a Lyapunov function \(V(t,x(t))\) satisfying
where \(\alpha _1, \alpha _2,\alpha _3\) and \(a\) are positive constants and \(\Vert .\Vert \) denotes an arbitrary norm. Then the equilibrium point of the system (4) is Mittag–Leffler (asymptotic) stable.
Remark 1
In the rest of this paper, we use the Caputo’s definition of fractional derivative. For the sake of simplicity the notations \(\mathbf{I}^{\mathrm{q}}\) and \(\mathbf{D}^{\mathrm{q}}\) denote fractional integral and derivative respectively.
3 Synchronization of integer-order chaotic systems
3.1 Problem statement
Dynamics of many problems of practical interest could be represented by practical form (5), such as: the motion of a non-autonomous symmetric gyroscope [9], the horizontal platform system [14], the Vander pol chaotic system [41], Inverted pendulum [41] and so on.
Consider an integer-order chaotic system described by the following second-order nonlinear differential equations
where \(\mathbf{y}(t)=\left[ {y_1 (t),y_2 (t)} \right] ^{T}\) denotes state vector, \(f(\mathbf{y},t)\) is a nonlinear function of \(\mathbf{y}\) and \( {\textit{t}}, \Delta f(\mathbf{y},t)\) represents additive uncertain term of the chaotic system, \(d_y (t)\) models external disturbances and \(u(t)\) specifies the control input. Without loss of generality, we can assume that \(\Delta f(\mathbf{y},t)\) and \(d_y (t)\) are bounded by some positive constants i.e. \(\left| {\Delta f(\mathbf{y},t)} \right| \le \Delta _f\) and \(\left| {d_y (t)} \right| \le D_y \). In addition, it is assumed that \(\Delta f(\mathbf{y},t)\) satisfies the conditions required to ensure that the system defined in (5) has a unique solution in the time interval \(\left[ {t_0, +\infty } \right) ,\;t_0 >0\) for any given initial condition. In order to realize a synchronization state between two chaotic systems, the control problem is deriving an appropriate control law in such a way that the states of chaotic system (5) track the states of another chaotic system, which is described as follows
where \(\mathbf{x}(t)=\left[ {x_1 (t),x_2 (t)} \right] ^{T}\) denotes state vector and \(g(\mathbf{x},t)\) is a nonlinear function of \(\mathbf{x}\) and \(t\), we can also assume that \(\Delta g(\mathbf{x},t)\) and \(d_x (t)\) are bounded by some positive constants i.e. \(\left| {\Delta g(\mathbf{x},t)} \right| \le \Delta _g, \left| {d_x (t)} \right| \le D_x \).
Assumption 1
With the above discussion, one can obtain that:
where \(\mu \) and \(\sigma \) are positive constants.
Definition 4
For the master system (6) and the slave system (5) it is said that synchronization state is realized, if there exists a control input \(u(t)\) such that
where \(\left\| .\right\| \) is the Euclidean norm and \(\mathbf{e}(t)=\left[ {e_1 (t),e_2 (t)} \right] ^{T}\)is called the state error. Then the problem of chaos synchronization reduces to a stabilization problem. The controller has the duty to keep \(\left\| {\mathbf{e}(t)} \right\| \) to zero. From (5) and (6), one can obtain the error dynamics as follows
A control strategy will be proposed in the next section to deal with this problem.
3.2 Controller design
In order to design a fractional-order sliding mode controller the first and most critical step is constructing an appropriate sliding surface, hence the following fractional sliding surface is proposed
where \(\alpha \in \left( {0,1} \right) \) and \(k_i, i=1,2,3\) are design parameters which should be chosen such that (9) be Hurwitz. As it is well-known in sliding mode control theory, we use \(\dot{S}=0\) to obtain the equivalent control law.
by substituting the error dynamics (8) into (10), one has
We assume the following equivalent control law
The fractional order term in control signal i.e. \(\mathbf{D}^{\alpha }e_1 \left( t \right) \), enhanced the controller robustness. Due to adding the extra degree of freedom, fractional order sliding mode controller can achieve better control performance than integer order sliding mode controller. Since in practical applications, the system uncertainty terms \(\Delta f(\mathbf{y},t)\) and \(\Delta g(\mathbf{x},t)\) and external disturbances \(d_{x}(t)\) and \(d_{y}(t)\) are unknown, and according to Assumption 1, in order to improve the robustness against uncertainties, we employ the following discontinuous reaching law
where \(\lambda _s\) and \(k_s\) are positive constants and will be determined later. Hence, the overall control law becomes
Theorem 2
Consider the synchronization error system (8). If, this system is controlled by the control law \(u(t)\) in (14), then the system trajectories will converge to the sliding surface \(S(t) = 0\).
Proof
Consider a positive definite Lyapunov function candidate in the following form:
Taking derivative of both sides of (15) with respect to time, one has
Substituting (14) into (16) yields
where \(\eta =\min \left\{ {k_3 \lambda _s,k_3 k_s} \right\} \)
It implies that the asymptotic stability of the system is guaranteed. Therefore, the fractional-order sliding mode control law (14) is verified. Hence, according to Theorem 2, the state trajectories of the error system (8) will converge to \(S(t) = 0\) asymptotically. \(\square \)
Theorem 3
Consider the nonlinear tracking error system (8). If this system is controlled by the fractional sliding surface (9), then its state trajectories will converge to the proposed fractional sliding surface in finite time.
Proof
We can obtain the reaching time as follows:
From inequality (17), we have
It is clear that
Taking integral of both sides of (19) from 0 to \(t_{r}\) and letting \(S(t_{r}) = 0\), we have
Therefore, the state trajectories of the error system (8) will converge to \(S(t) = 0\) in the finite time \(t_{r}\). This completes the proof. \(\square \)
Theorem 4
Consider the sliding mode dynamics (9), If Laplace transform of the error, \(E(s) = L\{ e(t)\}\) is bounded, then the state trajectories of the system (8) will converge to zero as \(t \rightarrow \infty \).
Proof
Using the Laplace transform of the Caputo derivative for (9), and assuming \(E(s) = L\{ e(t)\}\) one has
Using the final-value theorem of the Laplace transformation one can obtain:
Assuming \(|e(t)| < \beta <\infty \) it can be concluded that \(\mathop {\lim }\limits _{t\rightarrow \infty }e(t)=0\). This shows the convergence of the error system trajectories to the fractional sliding surface (9).
In the next section, we derive the adaption law for the proposed controller. \(\square \)
3.3 Adaptation law synthesis
We have designed an active sliding mode controller for synchronization of non-identical chaotic systems with uncertainty and disturbance. In the previous sections, it has been shown knowing the bounds of disturbances is vital to guarantee the system stability. However, in practice it is not simple to determine these bounds precisely. In what follows, we develop an adaptation law to overcome this problem.
Lemma 1
to tackle the unknown parameters, the following adaptation laws are proposed.
where \(\hat{{\sigma }}, \hat{{\mu }},\hat{{\lambda }}_s\) and \(\hat{{k}}_s\) are estimations for \(\sigma ,\mu ,\lambda _s\) and \(k_s\) respectively; and \(\xi _1,\xi _2,\xi _3\) and \(\xi _4\) are positive constants.
Proof
choose a Lyapunov function as follows
where \(\tilde{k}_{s}=\hat{k}_{s}-k_{s}\), \(\tilde{\mu }=\hat{{\mu }}-\mu , \tilde{\sigma }=\hat{{\sigma }}-\sigma \) and \(\tilde{\lambda }_{s}=\hat{\lambda }_{s}-\lambda _{s}\) taking derivative of both sides of (25) with respect to time yields:
Using the control input (14)
Introducing the adaptation laws (23) into the right hand of (27), one obtains
Using the adaptation laws (24) into the right hand of (28), one obtains
This implies that stability of the system is guaranteed.
One of the major contributions of the proposed controller is as follows:
Utilizing these adaptation laws allows us to gain a high-performance synchronization of non-identical chaotic systems with uncertainty and disturbance. The proposed method does not need the knowledge of disturbance bounds. Switching gains have a capability to adapt themselves automatically to stabilize the system perturbed by any unknown disturbances and uncertainty. \(\square \)
3.4 Example 1: synchronization of \(\Phi ^{6}\)-Van der Pol and Duffing–Holmes systems
In this section, an illustrative example has been presented to verify the effectiveness of the proposed controller.
The \(\Phi ^{6}\)-Van der Pol system is described as a master system by the following equations
where \(\mu =0.4,\zeta =-0.26,\delta =-1,\rho =-0.1,\omega =0.86\) and \(f_o =4.5\) yield chaotic trajectory. The chaotic behavior of this system has been depicted in Fig. 1.

Chaotic attractor of \(\Phi ^{6}\)-Van der Pol system
For the \(\Phi ^{6}\)-Van der Pol system the initial conditions are set as \(x_1 (0)=0.2\), \(x_2 (0)=0.5\). It is assumed that this system is perturbed by \(\Delta g\left( {x_1,x_2 } \right) =0.2\sin (x_1)\cos (x_2 )\) and \(d_x \left( t \right) =0.12\cos (3t)\).
The Duffing–Homes system is described as a slave system as follows:
where \(a=0.25\) and \(b=0.3\) yield chaotic motion. For the purpose of numerical simulations we set the initial conditions as \(y_1 (0)=-0.1, y_2 (0)=-0.3\). It is also assumed that the slave is perturbed by \(d_y \left( t \right) =0.1\cos (2t)\) and \(\Delta f(y_1 ,y_2 )=0.3\sin (y_1 )\sin (y_2)\).
The controller parameters are assumed as \(\hat{{\mu }}\left( 0 \right) =0.5,\hat{{\delta }}\left( 0 \right) =0.5\), \(\hat{{k}}_s \left( 0 \right) =0.5, \hat{{\lambda }}_s \left( 0 \right) =0.5\), \(\alpha =0.9, k_1 =15,k_2 =3,k_3 =1\). The control input is applied at \(t=2\) s.
Simulation results are illustrated in Fig. 2, which shows that the proposed controller provides a robust synchronization state between master and slave in the presence of uncertainties and disturbances.


Simulation results for Example 1. a State trajectories of the first states of synchronized systems (29) and (30). b State trajectories of the second state of synchronized systems (29) and (30). c State trajectories of the controlled synchronization error of (29) and (30). d Time response of the update parameters for (29) and (30). e Time history of the applied control input for (30)
4 Synchronization of fractional-order chaotic systems
So far, design of fractional-order sliding mode controller for synchronization of two integer-order chaotic systems is presented. This section deals with developing fractional-order sliding mode controller for fractional-order chaotic systems.
4.1 Problem statement
Consider a fractional-order chaotic system described as follows
where \(\alpha \in \left( {0,1} \right) \), \(\left| {\Delta f(\mathbf{y},t)} \right| \le \Delta _f \) and \(\left| {d(t)_y } \right| \le D_y\). Considering the system (31) as slave, one can define the master as follows
where \(\left| {\Delta g(\mathbf{x},t)} \right| \le \Delta _2\) and \(\left| {d(t)_x } \right| \le D_x\). Defining the state errors as (8), the error dynamics become
The controller should be designed such that \(\left\| \mathbf{e} \right\| \rightarrow 0\) as \(t\rightarrow \infty \).
Assumption 2
The uncertainty terms and external disturbances are assumed to satisfy the following inequalities
4.2 Controller design
In order to design a fractional-order sliding mode controller, the following fractional order sliding surface is proposed
Taking the first derivative from both sides of (34) with respect to time yields the following expression
By eliminating the uncertain terms from (35), we assume the following equivalent control law
Since in practical applications, the system uncertainty terms \(\Delta f({\mathbf {y}},t)\) and \(\Delta g({\mathbf {x}},t)\) and external disturbances \(d_{x} (t)\) and \(d_{y} (t)\) are unknown, and according to Assumption 2, in order to deteriorate the uncertain terms in (33), the switching control law is proposed
In practical application, the external disturbances and the system uncertainties are unknown then the control law becomes
Theorem 5
Consider the synchronization error system (33). If, this system is controlled by the control law \(u(t)\) in (38), then the system trajectories will converge to the sliding surface \(S(t) = 0\).
Proof
Consider a positive definite Lyapunov function candidate in the following form:
Taking derivative of both sides of (15) with respect to time, one has
Substituting (38) into (40) yields
which implies asymptotic stability.
Similar to the Theorem 3, the state trajectories of the error system (33) will converge to \(S(t)=0\) in the finite time \(t_r\):
Also similar to the Theorem 4, using the Laplace transform of the Caputo derivative for (34), it can be concluded that \(\mathop {\lim }\limits _{\mathrm{t}\rightarrow \infty }e(t)=0\). This shows the convergence of the error system trajectories to the fractional sliding surface (34). \(\square \)
Lemma 2
to tackle the unknown parameters, the following adaptation laws are proposed.
where \(\hat{{\sigma }}_\alpha ,\hat{{\mu }}_\alpha ,\hat{{\lambda }}_s\) and \(\hat{{k}}_s\) are estimations for \(\sigma _\alpha , \mu _\alpha ,\lambda _s\) and \(k_s\) respectively; and \(\xi _1, \xi _2, \xi _3\) and \(\xi _4\) are positive constants.
Proof
choose a Lyapunov function as follows
where \(\tilde{k}_{s}=\hat{k}_{s}-k_{s}\),\(\tilde{\mu }_\alpha =\hat{{\mu }}_\alpha -\mu _\alpha \), \(\tilde{\sigma }_\alpha =\hat{{\sigma }}_\alpha -\sigma _\alpha \) and \(\tilde{\lambda }_{s}=\hat{\lambda }_{s}-\lambda _{s}\) taking derivative of both sides of (45) with respect to time yields:
Using the control input (38)
Introducing the adaptation laws (43) into the right hand of (47), one obtains
Inserting the adaptation laws (44) into the right hand of (48), one obtains
This implies that stability of the system is guaranteed. \(\square \)
4.3 Example 2: Synchronization of two fractional-order Duffing–Holmes and Gyro systems
Let us assume that the fractional-order version of Duffing–Holmes system (master system) can be described by
where \(a=0.25\) and \(b=0.3\) yield chaotic motion. Chaotic attractor of this system is illustrated in Fig. 3 for \(\alpha =0.98\). For the purpose of numerical simulations we set the initial conditions as \(x_1 (0)=0.3\), \(x_2 (0)=-0.2\). It is also assumed that the master is perturbed by \(\Delta g\left( {x_1, x_2 } \right) =0.1\sin (x_2 )\cos (x_1 )\) and \(d_x \left( t \right) =0.1\cos (3t)\).

Chaotic attractor of fractional-order Duffing–Holmes system
The equation governing the motion of a symmetric gyro mounted on a vibrating base in terms of the rotation angle \(\theta \) (i.e. the angle between the spin axis of the gyro and the vertical axis), is given by [9]
where the term \(f\sin (\omega t)\) represents a parametric excitation, \(c_1\) and \(c_2\) are linear and nonlinear damping terms, respectively. The term \(\varepsilon ^{2}{\left( {1-\cos \theta } \right) ^{2}}/{\sin ^{3}\theta }-\beta \sin \theta \) is a nonlinear resilience force. Choosing the state variables as \(y_1 =\theta \) and \(y_2 =\dot{\theta }\), Eq. (51) becomes:
where \(\varepsilon =10,\;\beta =1,\;c_1 =0.5,\;c_2 =0.05,\;\omega =2\) and \(32<f<36\) yield chaotic behavior. Let us assume that the fractional-order version of Gyros system can be described by
The system (51) exhibits chaotic behavior as shown in Fig. 4 for \(q=0.98\). In the numerical simulations we set \(f=35, y_1 (0)=-0.1, y_2 (0)=0.2\), \(d_y (t)=0.2\cos (t),\Delta f=0.4\sin (y_1 )\sin (y_2)\). The design parameters are chosen as \(\alpha =0.98,k_1 =20,k_2 =5\) and \(k_3 =2\) and \(\hat{{\mu }}\left( 0 \right) =1,\hat{{\delta }}\left( 0 \right) =1,\hat{{k}}_s \left( 0 \right) =1, \hat{{\lambda }}_s \left( 0 \right) =1\).

Chaotic attractor of fractional-order Gyros system
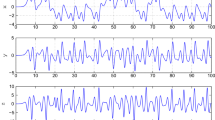
The simulation results are presented in Fig. 5, which show that the master and slave are synchronized magnificently after a transient state.


Simulation results for Example 2. a State trajectories of the first states of synchronized systems (50) and (53). b State trajectories of the second state of synchronized systems (50) and (53). c State trajectories of the controlled synchronization error of (50) and (53). d Time response of the update parameters for (50) and (53). e Time history of the applied control input for (53)
From the simulation results, it is shown that our theoretical results are feasible and efficient for synchronization of two non-identical fractional-order chaotic systems. Simulation results in Fig. 5 show the feasibility of the proposed controller in synchronizing of two fractional-order Duffing–Holmes and Gyros systems.
5 Conclusion
This paper studied the use of fractional-order sliding mode control in synchronization of both integer and fractional order chaotic systems. Using the fractional Lyapunov stability theory, the finite-time stability and robustness of the proposed scheme are mathematically proved. Simulation results illustrate the proposed method is feasible and efficient for synchronization of two non-identical fractional/integer order chaotic systems. Numerical simulations show this controller can synchronize master and slave systems even in the presence of external disturbance.
References
Roopaei M, Sahraei B, Lin TC (2010) Adaptive sliding mode control in a novel class of chaotic systems. Commun Nonlinear Sci Numer Simul 15:4158–4170
Lorenz EN (1963) Deterministic nonperiodic flow. J Atmos Sci 120:130–142
Matsumoto T (1984) A chaotic attractor from Chua’s circuit. IEEE Trans Circuits Syst I 31:1055–1058
Ge ZM, Li CH, Li SY, Chang CM (2008) Chaos synchronization of double Duffing systems with parameters excited by a chaotic signal. J Sound Vib 317:449–455
Chen G, Ueta T (1999) Yet another attractor. Int J Bifurc Chaos 9:1465–1466
Agiza HN (2004) Chaos synchronization of Lü dynamical system. Nonlinear Anal 58:11–20
Rafikov M, Balthazar JM (2004) On an optimal control design for Rössler system. Phys Lett A 333:241–245
Liu C, Liu L, Liu T (2009) A novel three-dimensional autonomous chaos system. Chaos Solitons Fractals 39:1950–1958
Chen HK (2002) Chaos and chaos synchronization of a symmetric gyro with linear-plus-cubic damping. J Sound Vib 255:719–740
Chai Y, Chen L, Wu R, Dai J (2013) Q–S synchronization of the fractional-order unified system. PRAMANA 80:449–461
Tigan G, Opris D (2008) Analysis of a 3D chaotic system. Chaos Solitons Fractals 36:1315–1319
Stenflo L (1996) Generalized Lorenz equations for acoustic-gravity waves in the atmosphere. Phys Scr 53:83–84
Qi G, Du S, Chen G, Chen Z, Yuan Z (2005) On a four-dimensional chaotic system. Chaos Solitons Fractals 23:1671–1682
Ge ZM, Yu TC, Chen YS (2003) Chaos synchronization of a horizontal platform system. J Sound Vib 268:731–749
Qi G, Wyk BJ, Wyk MA (2009) A four-wing attractor and its analysis. Chaos Solitons Fractals 40:2016–2030
Pecora LM, Carroll TL (1990) Synchronization in chaotic systems. Phys Rev Lett 64:821–824
Chen G, Dong X (1998) From chaos to order: methodologies, perspectives and applications. World Scientific, Singapore
Bocaletti S, Kurths J, Osipov G, Valladares D, Zhou C (2002) The synchronization of chaotic systems. Phys Rep 366:1–101
Bai J, Yu Y, Wang S, Song Y (2012) Modified projective synchronization of uncertain fractional order hyperchaotic systems. Commun Nonlinear Sci Numer Simul 17:1921–1928
Bai EW, Lonngren KE, Ucar A (2005) Secure communication via multiple parameter modulation in a delayed chaotic system. Chaos Solitons Fractals 23:1071–1076
Čelikovský S, Chen G (2005) Secure synchronization of a class of chaotic systems from a nonlinear observer approach. IEEE Trans Autom Control 50:76–82
Wu X, Li J (2010) Chaos control and synchronization of a three species food chain model via Holling functional response. Int J Comput Math 87:199–214
Chen D, Zhao W, Sprott JC, Ma X (2013) Application of Takagi–Sugeno fuzzy model to a class of chaotic synchronization and anti-synchronization. Nonlinear Dyn 73:1495–1505
Liao TL, Tsai SH (2000) Adaptive synchronization of chaotic systems and its application to secure communications. Chaos Solitons Fractals 11:1387–1396
Feki M (2003) An adaptive chaos synchronization scheme applied to secure communication. Chaos Solitons Fractals 18:141–148
Chen M, Zhou D, Shang Y (2005) A new observer-based synchronization scheme for private communication. Chaos Solitons Fractals 24:1025–1030
Puebla H, Alvarez-Ramirez J (2001) More secure communication using chained chaotic oscillators. Phys Lett A 283:96–108
Li Ch, Tong Y (2013) Adaptive control and synchronization of a fractional-order chaotic system. PRAMANA 80(4):583–592
Lina JS, Yan JJ (2009) Adaptive synchronization for two identical generalized Lorenz chaotic systems via a single controller. Nonlinear Anal RWA 10:1151–1159
Park JH, Lee SM, Kwon OM (2007) Adaptive synchronization of Genesio–Tesi chaotic system via a novel feedback control. Phys Lett A 371:263–270
Faieghi MR, Delavari H (2012) Chaos in fractional-order Genesio–Tesi system and its synchronization. Commun Nonlinear Sci Numer Simul 17:731–741
Faieghi MR, Delavari H, Baleanu D (2012) Control of an uncertain fractional-order Liu system via fuzzy fractional-order sliding mode control. J Vib Control 18:1366–1374
Chen D-Y, Liu Y-X, Ma X-Y, Zhang R-F (2012) Control of a class of fractional-order chaotic systems via sliding mode. Nonlinear Dyn 67:893–901
Bhalekar S, Daftardar-Gejji V (2010) Synchronization of different fractional order chaotic systems using active control. Commun Nonlinear Sci Numer Simul 15:3536–3546
Bai EW, Lonngren KE (2000) Sequential synchronization of two Lorenz systems using active control. Chaos Solitons Fractals 11:1041–1044
Agiza HN, Yassen MT (2001) Synchronization of Rossler and chaotic dynamical systems using active control. Phys Lett A 278:191–197
Ho MC, Hung YC (2002) Synchronization of two different systems by using generalized active control. Phys Lett A 301:424–428
Hung ML, Lin JS, Yan JJ, Liao TL (2008) Optimal PID control design for synchronization of delayed discrete chaotic systems. Chaos Solitons Fractals 35:781–785
Bowong S, Kakmeni FM (2004) Synchronization of uncertain chaotic systems via backstepping approach. Chaos Solitons Fractals 21:999–1011
Zhang J, Li C, Zhang H, Yu J (2004) Chaos synchronization using single variable feedback based on backstepping method. Chaos Solitons Fractals 21:1183–1193
Khalil HK (2002) Nonlinear systems, 3rd edn. Prentice Hall, Upper Saddle River
Delavari H, Ghaderi R, Ranjbar A, Momani S (2010) Fractional order control of a coupled tank. Nonlinear Dyn 61:383–397
Delavari H, Ghaderi R, Ranjbar A, Momani S (2008) Fractional order controller for two-degree of freedom polar robot. In: 2nd Conference on nonlinear science and complexity, Ankara, Turkey
Delavari H, Faieghi MR, Ranjbar A (2010) Fractional order sliding mode controller for inverted-pendulum. In: 4th IFAC workshop on fractional derivative and its application, Badajoz, Spain
Caldern AJ, Vinagre BM, Feliu V (2006) Fractional order control strategies for power electronic buck converters. Signal Process 86:2803–2819
Efe MÖ (2010) Fractional order sliding mode control with reaching law approach. Turk J Electr Eng Comput Sci 18:1–17
Li Y, Chen YQ, Podlubny I (2010) Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag–Leffler stability. Comput Math Appl 59:1810–1821
Li Y, Chen YQ, Podlubny I (2009) Mittag–Leffler stability of fractional order nonlinear dynamic systems. Automatica 45:1965–1969
Sabatier J, Moze M, Farges C (2010) LMI stability conditions for fractional order systems. Comput Math Appl 59:1594–1609
Baleanu D, Ranjbar A, Sadati SJ, Delavari H, Abdelhawad(Maraaba) T, Geji V (2011) Lyapunov–Krasovskii stability theorem for fractional systems with delay. Rom J Phys 56:5–6
Delavari H, Dumitru B, Sadati SJ (2012) Stability analysis of Caputo fractional-order nonlinear systems revisited. Nonlinear Dyn 67:2433–2439
Podlubny I (1999) Fractional differential equations. Academic Press, New York
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Delavari, H. A novel fractional adaptive active sliding mode controller for synchronization of non-identical chaotic systems with disturbance and uncertainty. Int. J. Dynam. Control 5, 102–114 (2017). https://doi.org/10.1007/s40435-015-0159-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-015-0159-0