
Abstract
This paper presents the mission design for the proposed MoonRise New Frontiers mission: a lunar far side lander and return vehicle, with an accompanying communication satellite. Both vehicles are launched together, but fly separate low-energy transfers to the Moon. The communication satellite enters lunar orbit immediately upon arrival at the Moon, whereas the lander enters a staging orbit about the lunar Lagrange points. The lander descends and touches down on the surface 17 days after the communication satellite enters orbit. The lander remains on the surface for nearly two weeks before lifting off and returning to Earth via a low-energy return.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
MoonRise is a proposed South Pole–Aitken Basin (SPAB) sample return mission in response to NASA’s New Frontiers 2009 Step 2 announcement. A sample return mission from the SPAB has been a high priority of scientists for well over a decade [1, 2]. The Vision and Voyages for Planetary Science in the Decade 2013–2022 stated that samples returned from the SPAB will determine the age of key events in the Solar System history and test the Cataclysm hypothesis [3] of the early bombardment period of the Earth-Moon system [4]. The impact that formed the SPAB revealed layers of rock deep within the crust of the Moon; since then countless small impacts have churned up the surface of the SPAB, as observed in Fig. 1, such that a sample from any location within the basin should contain material representative of the basin and its depths. The samples that the proposed MoonRise mission would retrieve would provide information about the early history of the formation and evolution of the Earth-Moon system [5, 6].

The South Pole - Aitken Basin (SPAB) on the far side of the Moon, shown within the yellow circle. One sees multiple impact craters within the basin
Motivation
Many versions of a sample return mission have been developed, several receiving a great deal of attention [4–8]. The NASA New Frontiers Program has selected two versions of a SPAB sample return mission to be developed into Phase A studies: Moonrise, [9] a response led by Prof. Mike Duke to the 2004 New Frontiers request, and MoonRise, [10] a response led by Dr. Bradley L. Jolliff to the 2009 New Frontiers request. These two proposals involved very different strategies to return samples to the Earth. The 2004 response included two nearly identical landers that would cooperate during the mission: one landing and collecting samples while the other provided communication relay between the far-side surface and the Earth. One of the largest perceived weaknesses of the 2004 proposal was the risk that the mission would exceed the cost cap of the New Frontiers budget. The 2009 response involved numerous changes to reduce the cost, including a single lander using a simplified system and a low-cost dedicated communication relay. Many trades were made during this design process; this paper discusses the mission design trades, the consequences of those trades, and the mission design solution for the proposed mission.
Mission Objectives
The primary scientific objectives of the proposed MoonRise mission are to collect samples from the SPAB with contextual imagery and return those samples to curators at Johnson Space Center. Studies have demonstrated that sieving samples from the lunar surface dramatically improves the quality of the scientific return while keeping the sample mass low [5]. The proposed mission would launch from Cape Canaveral, Florida, and return the samples to Earth in a capsule, landing within the Utah Test and Training Range (UTTR).
Mission Options
There are many ways to achieve a robotic sample return mission from the far side of the Moon. Virtually all involve a lander of some kind, and this paper only considers those missions that do. The landed vehicle could include an extendable scoop or some form of mobility to extend its reach. The landed vehicle could operate entirely autonomously or with assistance from ground controllers using a communication relay satellite. There are numerous ways that the vehicle(s) could travel to the Moon and numerous ways for the mission to return the samples to Earth.
The MoonRise team has designed the mission with several key drivers in mind: minimize the cost of the mission, minimize the risk of the mission, and maximize the science return from the mission. Several early trades defined the baseline concept of the proposed MoonRise mission; these trades will be discussed briefly since they significantly impact the mission design of the mission.
Early Trades
The first early trade study to define the baseline considered how many landers to deploy to the surface. The team determined that a single lander would satisfy the scientific objectives of a SPAB sample return mission since the surface is sufficiently churned up that samples taken from any location with prescribed scientific attributes should contain the same cross section of material. Building and operating a single lander clearly costs less than two identical landers. Early trades also indicated that the cost of a simple communication relay satellite was worth the reduction in risk and simultaneous increase in science return compared to a scenario where the lander executed its surface mission completely autonomously. Therefore it was determined that the 2009 New Frontiers response would involve a single lander and a dedicated, low-cost communication relay. These are referred to as the Sample Return Vehicle (SRV) and the ComSat. The SRV contains the systems required to softly land on the surface, collect samples, ascend from the surface, and return the samples to Earth.
It was further decided early on to focus the design options with the preference of flying a sample return vehicle that used solid rocket motors (SRMs) for large burns rather than one or more bipropellant systems. While a bipropellant system is very capable, its development costs are high and its complexity adds risk to the mission.
Another high-level architectural question involved whether or not to design the lander to survive a lunar night. It was decided very early that the best balance of cost, complexity, and risk was to design the lander to arrive on the surface in the local morning and depart the surface before the Sun set on the first lunar day on the surface. Hence, the surface mission is limited to a single lunar day – up to about 11 Earth days – including operational schedule margin.
Finally, it was determined that the landed vehicle would not include any mobility, but would use an extendable scoop to collect, sieve, and cache samples on the surface. This reduces the cost, complexity, and risk of the mission without sacrificing science. Hence, the ascent from the surface would occur at the same location as the landing.
Trajectory Options
Once the baseline concepts of the mission were identified, the team could consider trajectory options. Figure 2 illustrates a tree of choices that exists for the proposed mission; the shaded boxes indicate the options selected for the mission. Each of these selections will be discussed briefly here.

The tree of mission design trade studies considered for the proposed MoonRise mission
Launch
In the order of mission events, the first trade study considered here is whether the SRV and the ComSat would launch aboard the same launch vehicle or aboard separate vehicles. The New Frontiers cost cap limits the mission to a single launch, though the SRV’s design does not preclude the use of a pre-existing communication asset already in orbit at the Moon. The proposed mission assumes that no pre-existing communication asset is in place. Therefore, the two vehicles share the same launch vehicle.
Cruise
The two vehicles have the option to fly in an adjoined fashion to the Moon, similar to the Apollo missions, or they could fly separately to the Moon, similar to the GRAIL mission. The costs and benefits of this choice depend on the selection of other trades in the tree, such as the trajectories that the two vehicles would take to get into their lunar orbits. However, several aspects of the choice are clear. First, it is more complex to design a spacecraft system that can fly in an adjoined fashion and as two independent vehicles after separation. Depending on the timeline, there may not be sufficient time to characterize each vehicle after the separation before performing a critical maneuver, such as the landing, which adds risk to the mission. On the other hand, flying two vehicles simultaneously and independently to the Moon would potentially require more flight operators and hence more cost. This potential cost could be mitigated using the GRAIL mission as a model, which placed each spacecraft’s maneuvers on different days so that a single operations team could support both spacecraft [11].
The choice will be further explored as other aspects of the trajectory tree are examined, but the proposed MoonRise mission design involves flying the SRV and ComSat separately to the Moon, coordinating their activities so that a single operations team can support both vehicles.
Trans-Lunar Cruise
Many trajectory options exist to transfer a spacecraft from the Earth to the Moon, and not all of them are included in Fig. 2. First, each spacecraft could follow a conventional, direct transfer to the Moon. Direct transfers typically require 3–6 days to reach the Moon and they may be used to transfer the spacecraft directly to the lunar surface (though not all locations are accessible from direct landings [12, 13]), directly to a low insertion point, [13, 14] or directly to a lunar libration orbit [13, 15, 16]. One significant disadvantage to the direct transfer is that the launch periods are typically very brief; a launch delay may result in a full month’s delay in the mission. One may extend the launch period by implementing Earth phasing orbits, such as those used by Clementine [17] or by Chandrayaan-1 [18]. There are numerous costs and benefits associated with this strategy; ultimately MoonRise selected a different strategy with preferable costs and benefits described below.
Second, the spacecraft may implement a low-thrust, spiraling trajectory, such as that used by the SMART-1 mission [19]. The proposed MoonRise concept does not include a low-thrust propulsion system; the addition of such a system would involve numerous design changes, including costs and benefits beyond the scope of this paper.
Third, the spacecraft may take advantage of a low-energy trajectory, such as those used by Hiten, [20] ARTEMIS, [21] and GRAIL [11]. Low-energy trajectories typically take 3–4 months to reach the Moon, harnessing the Sun’s gravity to reduce the fuel requirements of the spacecraft [11, 13, 15, 20–23]. They do require slightly higher launch vehicle energy requirements, though this may be mitigated through the use of an outbound lunar flyby with optional Earth phasing orbits [13, 15].
Low-energy lunar transfers offer another interesting advantage. Since it takes 3–4 months to traverse a low-energy transfer, one can leverage that time and corresponding geometry to introduce significant separation between two independently flying vehicles. For instance, the two GRAIL spacecraft launched together and flew independently to the Moon. Each spacecraft executed two small deterministic maneuvers to separate their lunar arrivals by 25 hours [11]. This reduced the complexity of the flight operations and reduced cost in the mission. In a similar sense, the proposed MoonRise mission involves two separate vehicles that have very different destinations at the Moon. Low-energy transfers are one good way to launch the two vehicles together and separate them without requiring prohibitive amounts of fuel, while keeping the flight operations complexity low.
The proposed MoonRise mission design uses low-energy transfers to send both the SRV and ComSat to the Moon, where the vehicles launch together and then use two maneuvers each to be directed to their unique destinations at the Moon. The low-energy transfers cater to each spacecraft, permitting each spacecraft to reach a destination very different from the other using a modest ΔV budget.
ComSat Orbit
The ComSat can support a surface mission through several orbit options. The following descriptions provide a brief summary of the most compelling options.
First, the ComSat could in principle fly by the Moon and keep the far side of the Moon in view for 1–2 weeks as it departs the system. This option requires the least amount of fuel, but the very large distance limits the amount of data that may be returned to Earth, and the trajectory does not permit any contingency scenarios: the SRV must land according to plan.
Second, the ComSat could support the surface mission from a low lunar orbit, be it circular or elliptical. Since the landing site is in the Southern hemisphere of the Moon, it is generally preferable to place the ComSat into a highly inclined orbit with a node that is located in such a way to optimize the communication passes above the landing site. Low lunar orbits are only in view of the landing site for a fraction of the time, but when the communication link is available, the close distances permit very high data rates. Low lunar orbits require the most fuel to enter, though low-energy lunar transfers reduce this fuel requirement.
Third, the ComSat could support the surface mission from a libration orbit about the Earth-Moon L 2. This option provides the most communication coverage, but the link distance is high – greater than 50,000 km. This option requires virtually no fuel if the ComSat arrives at the Moon from a low-energy lunar transfer [13, 15].
This trade study does not have an obvious solution, but depends on the architecture being used. If the SRV is capable of communicating with the ComSat while digging, sieving, and caching, then it is useful to place the ComSat in a libration orbit, since the communication link in that case is continuous. The SRV would not have to wait for a particular communication pass to receive new instructions and the ground controllers could be more responsive to the surface activities. However, if the SRV cannot perform both sample collection and communication simultaneously, then the long link distance significantly reduces the total quantity of data that may be transmitted to the ComSat.
The MoonRise team preferred to keep the SRV’s design simple and low-cost, and hence did not place a requirement on the lander to be capable of communicating while simultaneously collecting samples. Further, the proposed ComSat design has ample fuel to descend into a low lunar orbit. Therefore, a low lunar orbit was selected for the ComSat’s orbit in order to maximize science return while keeping the SRV’s complexity low. Further trade studies found that it is ideal for many reasons to place the ComSat into a 3.5-hour elliptical orbit with a periapse altitude of ∼ 100 km and an apoapse altitude of ∼ 1800 km. The inclination and node were selected to balance the trans-lunar cruise’s ΔV cost with the communication link performance. A final advantage of this selection is that an international partner, such as the Indian Space Research Organisation (ISRO), could provide the ComSat for the SRV’s use during the surface mission and then proceed to use it for its own scientific investigations after the SRV’s surface mission is complete.
SRV Descent
The SRV could descend to the SPAB landing site in a number of different ways. The following descriptions provide a brief summary of the most compelling options.
The SRV’s trans-lunar cruise may be designed to place the SRV onto a trajectory that lands immediately upon arrival at the Moon. This has the advantage of an accelerated timeline, but offers challenging contingency plans if the ComSat is not prepared to support the landing, and does not give the ComSat much time to prepare for the landing.
The SRV could implement a lunar staging orbit prior to landing. This provides a robust solution that gives the ComSat ample time to fully prepare for the landing, including contingency circumstances. However, this option requires more than a single large maneuver: first it requires at least one large maneuver to insert into a lunar orbit, then a small maneuver to de-orbit, and finally a large maneuver to land. Without an efficient, restartable propulsion system, this option is mechanically very challenging.
The SRV could enter a libration orbit about either the Earth-Moon L 1 or L 2 point prior to landing. This trajectory option requires very little fuel if the SRV arrives from a low-energy transfer. This option gives the ComSat at least two weeks to prepare before the SRV’s first opportunity to land on the far side of the Moon. If the ComSat is not prepared in time, the SRV could wait in the libration orbit for another month or two before descending and landing. This option also requires only one large maneuver, namely, the landing, which may be executed via a solid rocket motor using hydrazine for thrust vector control.
The proposed MoonRise mission implements a low-energy transfer for both the SRV’s and ComSat’s trans-lunar cruises. Given that, the optimal choice to reduce cost and risk is to place the SRV into a libration staging orbit prior to landing. This option provides over 16 days for the ComSat to prepare for the landing, permits contingency landing options, and requires very little fuel except for the single, large landing maneuver.
SRV Earth Return
The trajectory that returns the samples to the Earth may also be crafted in a large number of ways. The SRV could stage in lunar orbit, libration orbit, or insert directly into its trans-Earth cruise. It may rendezvous with the ComSat if the mission involves the ComSat returning the samples to Earth. The trans-Earth cruise may be a conventional, direct return that takes 3–6 days, it may be a low-energy transfer, or it may involve one or more lunar swingbys such as lunar backflips. The proposed MoonRise concept involves the SRV bringing the samples to Earth rather than the ComSat.
The challenge for the proposed MoonRise mission is to find an Earth return trajectory that requires at most one large maneuver, i.e., the ascent burn, and targets a landing within the UTTR. No viable trajectories have been found that can ascend from the SPAB onto a direct transfer to the Earth that lands at UTTR. Lunar backflips provide some viable trajectories, but the lunar backflip option requires a large ascent burn and does not permit an Earth return that lifts off of the lunar surface at any time during the lunar day. It has been found that one can build a low-energy lunar transfer that ascends off of the lunar surface at any time during the lunar day – even immediately after landing – using a relatively small ascent burn and can target a landing on the same day within UTTR. Thus, the proposed MoonRise mission design involves a low-energy return to Earth.
The Proposed Mission Design
The trade studies presented above guided the mission design of the proposed MoonRise mission. Figure 3 provides a high-level illustration of the design of the SRV and ComSat vehicles [10]. The ComSat is contributed by ISRO and is largely derived from the Chandrayaan-1 spacecraft. The SRV includes the following modules:
-
the Lunar Braking Module (LBM),
-
the Lunar Surface Module (LSM),
-
the Lunar Ascent Module (LAM),
-
and the Sample Return Capsule (SRC).

The SRV and ComSat
The LBM and LAM include solid rocket motors for the large braking and ascent maneuvers. The LSM and LAM include hydrazine propulsion systems that would execute small maneuvers during the trans-lunar cruise and trans-Earth cruise, as well as provide thrust vector control during each SRM burn. This section presents the details related to the final design of the proposed MoonRise concept.
Launch
The proposed MoonRise mission design begins with a 21-day launch period that opens on July 7th, 2016 and closes on July 27th. MoonRise can launch in nearly any month of the year; the general characteristics of MoonRise’s trajectories all repeat each month, though a few months are undesirable due to lunar eclipses. In some cases MoonRise has an extended launch period that permits more than 30 launch opportunities in a month. MoonRise’s nominal mission is such a case: MoonRise can extend its launch period from 21 days to 37 days, where the additional 16 days support trajectories that arrive at the Moon at the same time within the ΔV budget.
MoonRise’s two vehicles would launch together into a low Earth orbit (LEO) parking orbit by a single launch vehicle. They would be placed into a nominal 185 km circular orbit at 28.5 deg inclination, optimized for launches from Cape Canaveral, Florida. The launch profile itself varies based on which launch vehicle is used; an Atlas V 531 should be sufficient. The time of launch depends on the actual launch vehicle, but is within a few minutes of 22:55:00 ET (“ET” refers to Ephemeris Time; this time corresponds to 18:55:00 Eastern Daylight Time) for the first day in the launch period, dropping to 20:57:00 ET (16:57:00 Eastern Daylight Time) for the last day in the nominal launch period.
After a brief coast in the LEO parking orbit, the upper stage of the launch vehicle reignites and performs the Trans-Lunar Injection (TLI) maneuver. The TLI maneuver places the SRV and ComSat, still attached, on the same low-energy lunar transfer.
Figure 4 shows the groundtrack of the LEO parking orbit of the Open and Close trajectories as they depart Cape Canaveral and intersect the Trans-Lunar Injection (TLI) state. After TLI, one can see when the two spacecraft come into view of the Canberra, Madrid, and Goldstone DSN stations.

The groundtrack of MoonRise’s launch and early operations
Figure 5 presents the data that directly drives the proposed 21-day launch period, including the launch vehicle’s C 3 target requirement, the SRV’s trans-lunar cruise (TLC) ΔV and the ComSat’s TLC ΔV for each launch day. The trans-lunar cruise for each vehicle has been optimized to keep the SRV’s ΔV low at the expense of the ComSat’s ΔV.

The SRV’s and ComSat’s deterministic TLC ΔV and the injection C 3 across the launch period
Trans-Lunar Cruise
The ComSat and the SRV follow separate three-month TLC trajectories to the Moon. The two TLC trajectories are similar low-energy lunar transfers crafted to place each vehicle into its own unique arrival conditions at the Moon. Figure 6 shows the lunar transfers for the open trajectories that launch on July 7, 2016, viewed from a perspective above the ecliptic in the Sun-Earth rotating coordinate frame. One can see that the two vehicles are launched together in a direction toward the Sun and the Sun-Earth L 1 point (EL 1). Although they are injected in the same general direction, they do fly separately. After 22 – 26 days, depending on launch date, the SRV performs a maneuver (TLM-S2) and targets its own unique lunar arrival conditions. The ComSat arrives at the Moon approximately 121 days after injection; the SRV lands nearly 17 days later.

The proposed MoonRise Trans-Lunar Cruise for the first day of the launch period, viewed in the Sun-Earth rotating coordinate frame from above the ecliptic and from the side
The trajectories are designed such that the SRV would require very little deterministic ΔV prior to descending to its landing site, and the ComSat would require no more than would comfortably fit within its ΔV budget. The launch vehicle’s TLI is thus designed primarily to minimize the SRV’s required ΔV. The TLI parameters have been optimized alongside all six of the deterministic TLC maneuvers, including the designs of TLM-S2, TLM-S3, LTI, TLM-C2, TLM-C3, and LOI, in order to minimize the SRV’s trans-lunar cruise ΔV requirements, subject to a large number of constraints, including the timing and geometry of the maneuvers and the ComSat’s available ΔV budget.
The low-energy lunar transfers are essentially highly eccentric orbits about the Earth: orbits with perigee altitudes around 185 km and apogee altitudes around 1.2 million km [13, 15]. As the ComSat and SRV approach their apogees, they are exposed to the Sun’s gravity long enough for the gravity to boost their energy about the Earth and raise their perigee altitudes. As they fall back toward the Earth, their perigee altitudes have risen to the orbital radius of the Moon. During the transfers, each vehicle performs two deterministic maneuvers to adjust its transfer to target its own arrival state at the Moon. The ComSat falls back toward its perigee such that it arrives at the Moon at a lunar altitude near 100 km. The SRV receives slightly more of a boost to its energy and arrives at the Moon at a much higher altitude: high enough to fall into a staging orbit near the Earth-Moon L 2 point, where it would linger for some time before landing.
The SRV performs at most 33 m/s of ΔV to adjust its trajectory, mostly to support a 21-day launch period as shown in Fig. 5, in order to target its desired arrival at the Moon; the ComSat performs at most 174 m/s of ΔV to adjust its own trajectory to arrive at its lunar orbit insertion state, also shown in Fig. 5. Most of the ComSat’s transfer ΔV is used to change its plane and periapse latitude to target a desirable orbit at the Moon. No matter which day the mission launches in its 21-day launch period, the ComSat arrives at the Moon on November 6, 2016 at 2:42:17 ET, 16.6 days before the SRV lands, and inserts into a ∼97.7 km × 7660.8 km altitude orbit, described in more detail later. Similarly, the SRV arrives at the exact same state 42,871 km above the surface of the Moon, 13 days before landing, no matter which day the mission launches. This means that the SRV flies the same trajectory for its final 13 days leading up to its landing. This is a benefit to the operations team because it reduces the number of contingencies that must be prepared.
The TLC trajectories do vary across the launch period. Figure 7 shows MoonRise’s trajectories for each day in the launch period, viewed in the Sun-Earth frame from above the ecliptic; Fig. 8 shows the trajectories as they arrive at the Moon, in the Earth-Moon frame from above. Finally, Fig. 9 shows the distance between each vehicle and the Earth over time during each mission in the launch period. One can see that the general characteristics of the trajectories do not change significantly across the launch period, though the early geometry varies the most. Each mission launches from the Earth in a direction toward the Sun, passing near EL 1. The SRV’s first deterministic maneuver, TLM-S2, is located such that there are at least three days of time between the maneuver and any time that the Sun-Earth-SRV angle drops below 1.2∘. This ensures that there is ample time to communicate and track the SRV before and after the maneuver. TLM-S1 and TLM-C1 are out of the ecliptic far enough that the Sun-Earth-Probe angle is always above 1.2∘. The statistical maneuvers are all placed with GRAIL heritage. One can see in these figures that the ComSat approaches its LOI state from almost identically the same direction in space at nearly the same velocity. Similarly, the SRV arrives at its Lunar Trajectory Insertion (LTI) state in very much the same way for each mission shown.

MoonRise’s Trans-Lunar Cruise trajectories for each day in the launch period, viewed in the Sun-Earth rotating coordinate frame from above the ecliptic

MoonRise’s lunar approach trajectories for each day in the launch period, viewed in the Earth-Moon rotating coordinate frame from above the ecliptic

The distance between MoonRise’s Trans-Lunar Cruise trajectories and the Earth for each day in the launch period
Lunar Arrival
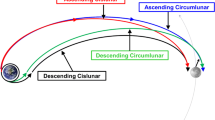
The SRV approaches the Moon at the same time as the ComSat, but enters a high-altitude staging orbit en route to landing, without requiring any critical insertion maneuver. The staging orbit drifts by the Earth-Moon L 2 point, similar to the trajectory that the ARTEMIS spacecraft followed as they arrived at the Moon in late 2010 [21]. The SRV remains in its TLC phase all the way until it initiates its braking burn. Figure 8, above, shows a top-down view of the ComSat’s and SRV’s lunar approach trajectories in the Earth-Moon rotating frame. One can see that the ComSat approaches the Moon and immediately enters its capture orbit, whereas the SRV approaches the Moon and lingers at a high altitude for over two weeks before landing. This ∼17-day loiter satisfies two important mission design requirements: it gives the ComSat ample time to reach its final orbit, be checked out, and be prepared to support the surface mission prior to the SRV’s landing, and it permits the SRV to land at its landing site in the local morning.
The SRV’s approach trajectory varies slightly from one launch day to the next, up until the LTI maneuver. After the LTI maneuver, the SRV’s trajectory is precisely the same for any launch day in the launch period, apart from small differences in mass. The SRV performs the LTI maneuver on November 9, 2016 at 18:18:03 ET; the LTI maneuver is never larger than 5.04 m/s and is included in the 33 m/s of deterministic ΔV required for TLC. Furthermore, the LTI maneuver is not time-critical, though the longer the SRV waits to perform it the more ΔV is required.
Nominal Braking Burn Interface
The SRV’s descent is designed to place it at the Braking Burn (BB) interface point such that it would land at the targeted site in the local morning. The target site is located at 200∘E, 60∘S, at an altitude of -5.575 km, relative to a spherical Moon with a radius of 1737.4 km. The BB interface point is located about 14 km above the target site and about 122 km uprange from the site. Table 1 captures more information about the nominal BB interface state. This state is identical for any launch opportunity in the launch period. Analyses have demonstrated that most minor changes in the BB interface state do not have a significant effect on the ΔV budget, including changing the landing site to any other location in the landing basin, or changing parameters like the flight path angle by several degrees.
ComSat LOI and Commissioning
After launch, the ComSat would separate from the SRV and perform cruise maneuvers to target an arrival at the Moon on November 6, 2016 at 02:42:17 ET at an altitude of 100 km, with a V\(_{\infty }\) of 0.40 km/s and a declination of 53 deg with respect to the Moon’s equator. This targeted arrival state is independent of the launch date; even the direction of the arrival V\(_{\infty }\) vector varies less than 0.2 deg. Upon arrival at the Moon, the series of maneuvers described below places the ComSat into a relay orbit designed to give near-optimal relay coverage to: (1) the SRV during descent and landing, (2) the LSM during lunar surface operations, and (3) the LAM during ascent.
A lunar orbit insertion (LOI) maneuver is performed at arrival to change the trajectory from the incoming hyperbola to an ellipse with a 10.5-hour period. This maneuver takes just under five minutes and is centered approximately at periapse to minimize gravity losses. It is performed with a constant pitch rate to simplify attitude control and at the same time keep the deceleration direction close to the anti-velocity direction to minimize steering losses.
The first period reduction maneuver (PRM1) is performed at periapse five orbits (nominally 52.5 hours) after LOI. This ∼3.6-minute maneuver reduces the period from 10.5 hours to 4 hours, and like LOI this maneuver is centered approximately at periapse and is performed with a constant pitch rate. The two-plus days between LOI and PRM1 allow time to perform orbit determination and to tweak the PRM1 maneuver timing and duration to correct for any execution errors in LOI.
The second period reduction maneuver (PRM2) is performed at periapsis 12 to 19 orbits after PRM1; the specific orbit would be selected to optimize the phasing of the final relay orbit to support landing. This ∼44-second maneuver reduces the period from 4 hours to 3.5 hours. PRM2 is centered approximately at periapse and is performed with a fixed thrust direction. The phasing correction maneuver (PCM) would fine-tune the phasing of the ComSat in its orbit prior to the SRV’s landing.
Figure 10 illustrates the orbit insertion and orbit reduction campaign used by the ComSat to prepare itself for supporting the SRV’s surface mission. Maneuvers whose names end with an “x” are contingency maneuvers.

The ComSat’s arrival at the Moon and establishment in a desirable communication relay orbit. Top: the radii of the ComSat and SRV over time; Bottom: the view of the orbit reduction strategy from the orbit normal and from the Earth
Lunar Descent and Landing
The proposed MoonRise landing trajectory and powered flight algorithms are designed to efficiently deliver the SRV to a soft landing in the presence of significant dispersions – primarily from the solid rocket motor, but also from imperfect knowledge of and delivery to the start of the braking burn and other effects. The lunar descent and landing (LDL) includes a sequence of nine events, illustrated in Fig. 11 and described as follows:
-
1.
Acquire Burn Attitude. The SRV rotates to the proper attitude for the braking burn.
-
2.
Wait for SRM Ignition. The SRV remains in the proper attitude until ignition.
-
3.
Start of BB. The SRM ignites at a nominal altitude of approximately 14.0 km, approximately 122 km uprange of the target landing site. The SRV’s hydrazine system is used to control the attitude of the spacecraft during the SRM burn using inertial guidance. The thrust vector is controlled to yield a near-zero flight path angle at the end of the BB, for any expected BB burn duration.
-
4.
Braking Burn Ends. The SRM burns for a nominal 86 seconds. At this point the SRV is approximately 3.7 km above the surface and 3 km uprange of the target site. The SRM burn is designed to remove most, but not all of the horizontal motion of the SRV, relative to the surface. The hydrazine system then removes all residual horizontal velocity while the spent SRM casing and LBM are jettisoned. This phase nominally ends approximately 135 seconds after the start of BB, ending approximately 2.4 km above the surface.
-
5.
Horizontal Velocity Cleanup. The hydrazine system completes the removal of all horizontal velocity relative to the surface. The SRV pitches over to enter a vertical free-falling attitude.
-
6.
Attitude Hold. The SRV holds its attitude and free-falls vertically. The SRV’s guidance switches to surface-relative navigation and acquires radar lock on the surface.
-
7.
Start Terminal Braking. Nominally 168 seconds after BB and 1.3 km above the surface, the SRV re-ignites its hydrazine system to begin terminal braking. This phase involves a constant vertical deceleration, with adjustments to zero any horizontal velocity. The goal of the terminal braking is to achieve a vertical velocity of 1.6 m/s at an altitude of 30 meters.
-
8.
Terminal Velocity. Nominally 207 seconds after BB, the SRV holds a constant vertical velocity of 1.6 m/s from 30 meters until surface contact.
-
9.
Touchdown. Surface contact occurs nominally 226 seconds after BB.

The Lunar Descent and Landing
This sequence has been validated using high-fidelity Monte Carlo simulations under worst-case scenarios, such as cases where the SRV arrives at the BB interface at a 3- σ high or 3- σ low altitude, with 3- σ high or 3- σ low velocities. In each case the distribution of simulated landing sites may be characterized by a long thin ellipse: roughly 12 km long by 1 km wide. The length is largely defined by the uncertainty in the burn duration of the SRM. This “landing strip” error ellipse is easily placed in numerous desirable landing sites throughout the SPAB.
Surface Operations
The ComSat’s orbit has been selected to maximize the relay capabilities with a useful orbit period. It is conservatively assumed to be capable of communicating with the SRV only when it is at least 20∘ above the SRV’s horizon. The selected 3.5-hour orbit provides remarkably constant pass durations from one orbit to the next, varying from 68 to 77 minutes in duration per contact. Figure 12 illustrates the groundtrack of the ComSat; it is highlighted when in view of the SRV.

The ComSat’s Groundtracks
Figure 13 illustrates the view of the ComSat’s orbit during one of its first orbits in the surface mission, viewed from the orbit-normal direction. The ComSat’s link with the Earth would be partially occulted by the Moon during the first few days of the surface mission (note the partial occultation in Fig. 13); the occultation durations diminish as the orbit precesses. The worst-case occultation occurs on Nov 23, lasting 48.8 minutes; the final occultation occurs on Nov 27.

The ComSat Orbit Geometry
The ComSat’s proposed orbit sends it through the shadow of the Moon. The worst eclipse the ComSat would experience during the nominal mission would occur on Nov 10, before the SRV lands. This eclipse would be nominally 23.6 minutes long, with 23.0 minutes within the umbra. The worst eclipse experienced after the SRV lands occurs on Nov 22, lasting 8.8 minutes in length, 6.9 minutes within the umbra. The final eclipse during the nominal mission occurs on Nov 25.
Lunar Ascent and Trans-Earth Cruise
The proposed MoonRise ascent trajectory and autonomous guidance algorithms are designed to safely extract the LAM from the LSM, and to efficiently place the SRV onto the Trans-Earth Cruise (TEC). As with LDL, the SRM dispersions are a major error source, but unlike LDL, they do not need to be immediately corrected. The ascent phase includes seven prescribed events as illustrated and summarized in Fig. 14.

Liftoff and Ascent
The SRV lifts off the surface and proceeds to follow the TEC trajectory to return to Earth. The TEC is a 137-day low-energy transfer that is very similar to the TLC, though it extends further from the Earth in order to truly minimize the fuel requirements through the use of a distant lunar flyby. Figure 15 shows views of the nominal TEC in the Sun-Earth and Earth-Moon rotating frames for reference.

The proposed MoonRise Trans-Earth Cruise for the reference ascent time, viewed in the Sun-Earth rotating coordinate frame (left) and the Earth-Moon rotating frame (right), each from above the ecliptic
The SRV may lift off the surface at any time during the surface mission; the nominal ascent time is approximately 3:02 pm in the local afternoon. At that time, the Sun is still over 19∘ above the local horizon, not accounting for nearby topography. This nominal ascent time corresponds to Dec 1, 2016 at 11:52:36 ET, or Julian Date 2457723.99486 ET.
The SRV lifts off the surface targeting a nominal flight path angle of approximately 56.1∘ and an azimuth of approximately 289.1∘ (a bit North of West). This direction is high enough so that there is no concern about striking the surface. The ComSat would be in view of the SRV during the ascent, and the SRV would come into view of the Earth after only ∼2 minutes from the start of the ascent burn.
After ascent, the SRV remains near the Moon for approximately two weeks before naturally departing the vicinity. If necessary, it performs two statistical maneuvers to ensure that it is on the proper trajectory before it departs the Moon. It remains near the Moon longer if it ascends earlier and shorter if it ascends later. All ascent times wind onto the same Trans-Earth cruise.
Two deterministic maneuvers are required during the TEC, prior to the UTTR targeting: TEM3 and TEM4, though one of the maneuvers is typically very close to zero – it has a deterministic component of only 8 mm/s for the nominal ascent time.
The SRV must spend a little extra fuel if it ascends from the surface anytime between 10:24 am and 12:21 pm local time to avoid a lunar eclipse. With small increases to the ascent velocity target and the Trans-Earth maneuvers TEM3 and TEM4, the SRV entirely avoids all eclipses. These ascent times are budgeted in the SRV’s total ΔV budget.
In general, it requires a plane change to reach a trajectory that supports a landing in Utah, since Utah is located at a latitude around 45∘. MoonRise’s TEC is designed to pass within about 34,000 km of the Moon on its final approach to the Earth, such that the Moon provides this plane change (see Fig. 15, right). The flyby is very distant – so distant that it doesn’t even impact the navigation of the spacecraft – but the ΔV savings are significant, on the order of 100 m/s, compared to a mission that has to perform the plane change using onboard fuel. The fuel spent at this phase of the mission would have to be carried through all previous phases as well.
Earth Approach and EDL
No matter which ascent time is used off of the lunar surface, the Sample Return Capsule (SRC) arrives at its Entry, Descent, and Landing (EDL) interface on April 17, 2017, only nine months after launch.
The final stages of the TEC are modeled after Stardust and designed for safety. The SRV would miss the Earth by more than 200 km if it did not perform any UTTR targeting maneuvers. The purpose of this is to ensure that the SRV would not accidentally impact a populated area on the Earth in the event that the spacecraft cannot or does not perform another maneuver. When the SRV has approached within 8 days of arriving at the Earth, its navigation uncertainty has fallen enough that it can perform a maneuver to bring its target-point onto the Utah Test and Training Range with a 3 σ error ellipse safely within UTTR’s acceptable landing area. Hence, the first targeting maneuver, UTTR-1, is performed on April 9, 2017, eight days before Earth entry (E), and it targets the nominal landing site. A backup maneuver, UTTR-1x, is located 1 day later in case UTTR-1 is not performed.
The SRV would likely require one additional targeting maneuver to ensure that the SRC’s landing ellipse is centered on the target point. The targeting maneuver UTTR-2 is scheduled at E-4 days. Analyses have shown that after performing UTTR-2, the mission would be on target for a good landing, even with 3 σ dispersions. However, as an additional precaution, three contingency maneuvers are scheduled and are available as needed: UTTR-2x, UTTR-3, and UTTR-4, scheduled at E-3 days, E-2 days, and E-1 day, respectively.
The Lunar Ascent Module (LAM) releases the SRC 4 hours before EDL using a spring mechanism, which imparts a small separation ΔV between the two craft. The SRC is released in its required atmospheric-entry attitude, spinning at 13.5 rpm. The LAM, which remains 3-axis stabilized, waits 30 minutes to ensure that the SRC is at a safe distance and then fires its engines once more. The maneuver is a 19 m/s Earth-divert maneuver, designed to raise the LAM’s perigee altitude such that it misses the Earth by at least 200 km. This maneuver places the LAM on a trajectory that departs the Earth-Moon system.
The TEC trajectory is designed such that the SRV (including the LAM and SRC) traverses the exact same trajectory starting at UTTR-1, no matter which time it ascends from the lunar surface. The TEC trajectories do vary after ascent, depending on the time of ascent; but all trajectories arrive at the same position in space 8 days before EDL at the time of UTTR-1. The advantage of this is that the operations team would only need to design a single nominal entry, descent, and landing for the SRC and a single nominal Earth-divert maneuver for the LAM. The SRC arrives at its atmospheric interface point on April 17, 2017 at 21:25:07 ET. A summary of this nominal interface state is provided in Table 2. The EDL, illustrated in Fig. 16, can accommodate any state within the expected covariance of delivered states.

Approach, Entry, Descent, and Landing
ΔV Budget
The proposed MoonRise ΔV budget is closely tied to its architecture, mass, and varying configuration due to the variety of maneuvers it must perform.
The ComSat’s ΔV capabilities are derived from ISRO’s Chandrayaan-1 spacecraft, and as such it is quite capable. The trans-lunar cruise is therefore constructed to minimize the SRV’s deterministic ΔV, potentially at the expense of the ComSat’s ΔV.
The details are beyond the scope of this paper, but the SRV’s braking burn and ascent burn are each thrust-vector controlled using its hydrazine thrusters; the amount of fuel consumed by the hydrazine system depends on the performance of each solid rocket motor. A worst-case performance for each phase has been assumed when designing the proposed MoonRise ΔV budget.
Realistic navigation simulations have been performed to estimate the statistical cost of each maneuver, including the SRV’s station keeping costs as it loiters near the Moon prior to descending to the surface. The most significant navigation errors originate from the launch vehicle injection errors and then subsequent maneuver execution errors. Injection errors are estimated from previous missions with similar injections; maneuver execution errors include ∼1 % proportional errors in magnitude and pointing (3 σ) and fixed errors in each axis of 6 mm/s (3 σ) for the SRV and ∼30 mm/s (3 σ) for the ComSat.
Tables 3 and 4 summarize the proposed ΔV budgets for the SRV and ComSat, respectively.
Summary and Conclusion
The proposed MoonRise mission design provides a full set of end-to-end trajectories that may be used to support a mission to retrieve samples from the South Pole – Aitken Basin on the far side of the Moon. This design is an innovative solution that incorporates numerous beneficial features while satisfying all design requirements of the proposed SRV and ComSat.
The trajectories presented here minimize cost, complexity, and risk in a large number of ways. They support an extended launch period, reducing the impact on the mission of a delay in launch operations. Using this proposed mission design, neither the SRV nor the ComSat must perform a maneuver within 7 days of launch. Further, no two maneuvers on either spacecraft are performed within two days of each other, with the exception of contingency scenarios, providing a reasonable schedule for the spacecraft operators. No matter the launch date, the ComSat always performs its lunar orbit insertion at the exact same time, namely, November 6, 2016 at 02:42:17 ET, in full view of both the Goldstone and Canberra DSN complexes. The ComSat has ample time to reduce its orbit and prepare to support the SRV’s lunar descent and landing. No matter the launch date, the SRV arrives at the Moon and inserts into the exact same staging orbit, yielding the exact same lunar descent and landing. The SRV has the opportunity to delay its landing by a month or two in case the mission requires additional time to prepare for landing. The SRV’s final approach to its lunar landing is in full view of the ComSat as well as both the Goldstone and Canberra stations; while Goldstone and Canberra cannot observe the final landing on account of the landing taking place on the far side of the Moon, the ComSat would further observe the entire descent and landing. The SRV lands in the local morning at the landing site, yielding the longest-duration surface mission available. The SRV may depart the surface immediately upon arrival or any time after landing. The nominal ascent would be observed by the ComSat and – once out of occultation – by two DSN complexes for redundancy. The low-energy trajectories permit the SRV to use low-cost solid rocket motors on both the landing and ascent, while maintaining reliable control using a simple hydrazine system. The Earth return trajectories have been designed such that the SRV’s final eight days approaching Earth are exactly the same. Further, the approach to Earth has been designed for safety, such that the SRV would not accidentally impact a populated area on Earth in the event of a failure. Finally, the Sample Return Capsule would land during the day within the Utah Test and Training Range. This long list of features have created a very high-value, robust mission design for this proposed MoonRise mission.
References
National Research Council: New Frontiers in the Solar System, an Integrated Exploration Strategy. The National Academies Press, Washington, DC (2011)
Committee on the Planetary Science Decadal Survey: National Research Council, Vision and Voyages for Planetary Science in the Decade 2013-2022. The National Academies Press, Washington, DC (2011)
Gomes, R., Levison, H. F., Tsiganis, K., Morbidelli, A.: Origin of the cataclysmic late heavy bombardment period of the terrestrial planets. Nature 435 (7041), 466–469 (2005)
Alkalai, L., Solish, B., Elliott, J. O., Mueller, J., McElrath, T., Parker, J: ORION/MoonRise: A Human & Robotic Sample Return Mission Concept from the South Pole-Aitken Basin. Annual Meeting of the Lunar Exploration Analysis Group, Greenbelt, Maryland 22–24 (2012)
Jolliff, B. L., Shearer, C. K., Papanastassiou, D. A., Alkalai, L., Team, M: MoonRise: South Pole-Aitken Basin Sample Return Mission for Solar System Science. Annual Meeting of the Lunar Exploration Analysis Group, Washington, DC, 14–16 (2010)
Jolliff, B. L., Alkalai, L., Pieters, C. M., Head, J. W., Papanastassiou, D. A., Bierhaus, E. B.: Sampling the South Pole-Aitken Basin: Objectives and Site Selection Criteria. Lunar and Planetary Institute Science Conference Abstracts, Vol. 41 of, Lunar and Planetary Inst. Technical Report p. 2450 (2010)
Alkalai, L., Jolliff, B., Papanastassiou, D.: MoonRise: Sample Return from the South Pole – Aitken Basin. International Planetary Probe Workshop, Barcelona, Spain, pp. 14–18 (2010)
Alkalai, L., Solish, B., Elliott, J. O., McElrath, T., Mueller, J., Parker, J.: ORION/MoonRise: A Proposed Human & Robotic Sample Return Mission from the Lunar South Pole-Aitken Basin. IEEE Aerospace Conference,Big Sky, Montana (2013)
Duke, M.: MoonRise: Sample Return from the South Pole-Aitken Basin, New Frontiers Concept Study Report (CSR), Colorado School of Mines (2005)
Jolliff, B. L.: MoonRise: Sample Return from the South Pole-Aitken Basin, New Frontiers Concept Study Report (CSR). Washington University, St.Louis (2010)
Chung, M. J., Hatch, S. J., Kangas, J. A., Long, S. M., Roncoli, R. B., Sweetser, T. H.: Trans-Lunar Cruise Trajectory Design of GRAIL (Gravity Recovery and Interior Laboratory) Mission. AIAA/AAS Astrodynamics Specialist Conference, No. AIAA 2010-8384, Toronto, Ontario, Canada, AIAA/AAS, August 2–5 (2010)
Anderson, R. L., Parker, J. S.: A survey of ballistic transfers to the lunar surface. J. Guid. Control. Dyn. 35, 1256–1267 (2012)
Parker, J.S., Anderson, R.L.: Low-Energy Lunar Trajectory Design, DESCANSO Deep Space Communication and Navigation Series. John Wiley and Sons, Hoboken, New Jersey (2014)
Parker, J. S., Anderson, R. L., Peterson, A.: A Survey of Ballistic Transfers to Low Lunar Orbit, Proceedings of the AAS/AIAA Spaceflight Mechanics Meetings held 13-17 Feb 2011, New Orleans, Louisiana, Paper AAS 11-277. In: Jah, M. K., Guo, Y., Bowes, A. L., Lai, P. C. (eds.) Vol. 140 of Advances in Astronautical Sciences, San Diego, CA, AAS/AIAA, Univelt Inc (2011)
Parker, J. S.: Low-Energy Ballistic Lunar Transfers. PhD thesis, University of Colorado, Boulder, Colorado (2007)
Parker, J. S., Born, G. H.: Direct Lunar Halo Orbit Transfers. J. Astronaut. Sci., Vol. 56, Oct–Dec (2008)
Nozette, S., Rustan, P., Pleasance, L. P., Kordas, J. F., Lewis, I. T., Park, H. S., Priest, R. E., Horan, D. M., Regeon, P., Lichtenberg, C. L., Shoemaker, E. M., Eliason, E. M., McEwen, A. S., Robinson, M. S., Spudis, P. D., Acton, C. H., Buratti, B. J., Duxbury, T. C., Baker, D. N., Jakosky, B. M., Blamont, J. E., Corson, M. P., Resnick, J. H., Rollins, C. J., Davies, M. E., Lucey, P. G., Malaret, E., Massie, M. A., Pieters, C. M., Reisse, R. A., Simpson, R. A., Smith, D. E., Sorenson, T. C., Breugge, R. W. V., Zuber, M. T.: The clementine mission to the moon: scientific overview. Science 266(16), 1835–1839 (1994)
Goswami, J. N., Annadurai, M.: Chandrayaan-1: India’s first planetary science mission to the moon. Current Science; Special Section: Chandrayaan-1 96 (25), 486–491 (2009)
Foing, B.H., Racca, G.R.: The ESA smart-1 mission to the moon with solar electric propulsion. Adv. Space Res. 23(11), 1865–1870 (1999)
Uesugi, K.: Japanese first double Lunar swingby mission ‘HITEN’. Acta Astronaut. 25(7), 347–355 (1991)
Sweetser, T.H., Broschart, S., Angelopoulos, V., Whiffen, G., Folta, D., Chung, M., Hatch, S., Woodard, M.: ARTEMIS Mission design,. Space Sci. Rev. 165(1–4), 27–57 (2011)
Miller, J.K., Belbruno, E.A.: A Method for the Construction of a Lunar Transfer Trajectory Using Ballistic Capture. In: Soldner, J.K., Misra, R.K., Sackett, L.L., Holdaway, R. (eds.) A Method for the Construction of a Lunar Transfer Trajectory Using Ballistic Capture, Proceedings of the 1st AAS/AIAA Spaceflight Mechanics Meeting held 11-13 February 1991, Houston, Texas, Paper AAS 91-100, Vol. 75 of Advances in Astronautical Sciences, San Diego, CA, AAS/AIAA, Univelt Inc., pp. 97–109 (1991)
Belbruno, E.A., Miller, J.: A Ballistic Lunar Capture Trajectory for the Japanese Spacecraft Hiten, Tech. Rep. IOM 312/90.4-1731-EAB, JPL, California Institute of Technology (1990)
Acknowledgments
This work would not be possible without many people who contributed to the proposed 2009 New Frontiers MoonRise concept design, including the PI Dr. Bradley Jolliff, the capture lead Leon Alkalai, and the team members within the Jet Propulsion Laboratory, Lockheed Martin, ISRO, CSA, DLR, and elsewhere. Many people contributed to various elements of the proposed trajectory design, including Gene Bonfiglio, Min-Kun Chung, Sara Hatch, Dan Johnston, Stuart Kerridge, Ralph Roncoli, Guru Singh, Evgeniy Sklyanskiy, and Roby Wilson.
The research presented in this paper has been carried out at the Jet Propulsion Laboratory, California Institute of Technology, under a contract with the National Aeronautics and Space Administration.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Parker, J.S., McElrath, T.P., Anderson, R.L. et al. Trajectory Design for MoonRise: A Proposed Lunar South Pole Aitken Basin Sample Return Mission. J of Astronaut Sci 62, 44–72 (2015). https://doi.org/10.1007/s40295-015-0037-1
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40295-015-0037-1