
Abstract
In this paper, some seismic factors, namely response modifiers, ductility, overstrength and deflection amplification, of steel moment resisting frames (MRFs) under near-field records are evaluated. To this purpose, two separate groups of near-field records (e.g., pulse-like and non-pulse-like) on the behaviour of MRFs are studied. In particular, four models with different storey heights (3-, 6-, 9-, and 12-storeys) are examined through IDA analyses under 20 pulse-like and 20 non-pulse-like ground motion records. Finally, the achieved results are compared with the recommendation values of the ASCE code to assess their reliability. According to the results, the MRF structures demonstrate better seismic behaviour under the non-pulse-like ground motions rather than pulse-like ones. The average response modification factor obtained from non-pulse-like ground motions is about 5.0, which is 1.19 times higher than the corresponding results achieved from pulse-like records.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Steel moment resisting frame (MRF) is one of the most widely used systems in seismic areas. Besides its architectural and functional advantages, it has demonstrated satisfactory strength levels and energy absorption features. However, the global behaviour of MRFs under seismic excitations depends on how they have been designed. Current codes for seismic design of building structures assume inelastic response of selected components under the design earthquake. However, they usually adopt linear elastic force-based analysis procedures rather than complicated non-linear methods. In fact, they permit a reduction in seismic design loads, taking advantage of both the structural overstrength and the energy dissipation capacity. These properties are accomplished in structural design through a response modification factor. On the other hand, a structure designed by the mentioned reduced forces should be capable of tolerating inelastic deformations. The maximum inelastic deflection that might occur during an earthquake can be computed through an elastic analysis, which is amplified by a deflection amplification factor (Uang 1991). Furthermore, the obtained seismic factors in designing the structural system affect mostly its behaviour under lateral excitations. So, selection of proper seismic factors, which can demonstrate a suitable structural inelastic capacity, is the most crucial phase in designing issue. Evaluating these parameters is directly related to the type of ground motion records (i.e., near-fault or far-field), so it is necessary to investigate the inelastic behaviour of the structural systems under different type of ground motions. Recently, the estimation of the inelastic deformations of several structural systems was the subject of many researchers (Kim et al. 2009; Mahmoudi and Abdi 2012; Fanaie and Afshar 2014; Louzai and Abed 2015; Formisano et al. 2015; Faggiano et al. 2018). However, they almost use far-field ground motions in order to obtain the seismic factors of the structural systems.
The observation of the primary structure damages underwent by the earthquake event in the near-fault region has arisen concern among engineers. Many studies were done to investigate the characteristic of near-fault ground motions and its effects on structural members (Archuleta and Hartzell 1981; Baker 2007; Mavroeidis and Papageorgiou 2010; Halldorsson and Papageorgiou 2012; Shahi and Baker 2013).
For a site located in the near-field region of a fault, the characteristics of the ground motion at the site depend, among other factors, on how the rupture propagates in that site. Such a characteristic is named as the rupture directivity effect. A near-fault site may experience forward directivity when the fault rupture propagates towards the site with a velocity almost equal to the shear-wave velocity. The resulting ground motion typically contains a large velocity pulse, which may impose extreme demands on a structure. When the fault rupture propagates away from the site, it may experience backward directivity effects. Such ground motions tend to be of low intensity and long duration (Dabaghi 2014). The effects of mentioned characteristics were studied by many researchers, and all researches cited their destructive impacts on structural members (MacRae et al. 2001; Alavi and Krawinkler 2004; Sehhati et al. 2011). So, the response of structures under near-fault ground motions are dependent on the characteristics of the records discussed above and are different from the response of structures under far-field ground motions. It is almost clear that the near field ground motions, especially the pulse-like ones, cause more structural demands than the others. For reliable designing, structural behaviour should be investigated according to various kinds of ground motion records. Therefore, modifying the seismic parameters of the structural systems under near field earthquakes is one of the important steps in reducing damages in those areas. However, the recommended values of the seismic behaviour factor in seismic design codes disregard the position of the under construction structures respect to their nearby faults. Therefore, it seems to be interesting to add some other factors to take into account this important issue. Such factors can be obtained according to the comparison of the response of the structures under the near-fault and far-field ground motion records. It is almost evident that the structures cannot exploit their full inelastic capacities in accordance to pulse-like records, which release the accumulated strain energy under form of seismic waves. So, it is not suitable to take into account the full inelastic capacity of the structural systems in near-field areas, which are qualified for producing pulse-like ground motion records.
In 2007 Baker introduced a method to extract the largest velocity pulse from ground motions. The procedure consisted of using the wavelet transform to identify the frequency an the amplitude of the dominant pulse of the record. Baker used the size of the extracted pulse relative to the original ground motion to present a quantitative criterion for classifying a ground motion as a pulse-like. To recognize the subset of pulse-like records, which were caused by directivity effects, two more criteria were applied: the pulse arrived at the beginning of the ground motion and the absolute amplitude of the velocity pulse, which was more significant than the remaining record.
In this paper, the seismic behaviour of steel MRFs under a series of pulse-like and non-pulse-like ground motions has been investigated and the forward directivity effects, which are currently not adequately taken into consideration in the design process, are considered. Accordingly, the response of the MRFs under two different types of near-fault ground motions (i.e., records with forward and backward directivity effects) can be evaluated and compared. The selected ground motion records (pulse-like or non-pulse like) are classified based on the Baker’s approach. A variety of models with the different number of levels (3-, 6, 9-, and 12-storeys), have been designed and numerically modelled through the OpenSees software. Incremental dynamic analyses under pulse-like and non-pulse-like ground motions have been conducted and the seismic factors, such as overstrength, reduction factor due to ductility, response modification and displacement amplification, have been estimated for all models. To investigate how the existence of the forward directivity effect in ground motions may influence the behaviour of structural MRFs, the obtained seismic factors of pulse-like and non-pulse-like ground motions have been compared each other and with the suggested values of the ASCE provisions.
2 Seismic Factors of MRFs
The response modification factor was first proposed by the ATC-3-06 (1978). Then, it was presented in the ATC-19 (1995) and ATC-34 (1995) as a product of three factors, i.e., overstrength factor, ductility factor and redundancy factor. To compute seismic factor, one can use either a nonlinear static pushover procedure or a nonlinear incremental dynamic analysis (IDA) (Kim et al. 2009; Mahmoudi and Abdi 2012; Fanaie and Afshar 2014; Louzai and Abed 2015).
Figure 1 is used to explain and illustrate seismic performance factors. In this figure, Vy and ∆y represent the yield force and displacement, respectively, ∆max is the maximum roof displacement, Vd and ∆d are the seismic base shear required for design and its corresponding displacement, respectively, and Ve represents the force level that would be developed in the seismic-force-resisting system, if the system remained entirely linearly elastic for design earthquake ground motions. In addition, Vd corresponds to the formation of the first plastic hinge (Vs) in the load resistance factor design (LRFD) method and however, to be consistent with the allowable stress design (ASD) method, it is reduced to the service load level by a factor of about 1.4 (Uang 1991).

Typical base shear-roof displacement relationship of a structure
According to the Fig. 1, the seismic factors are defined based on the following equations:
In the previous relationships R, Rs, Rµ, and Cd represent response modification factor, overstrength factor, reduction factor due to ductility and deflection amplification factor, respectively. ATC-19 (1995), based on the guidelines of the frame seismic design, presented the redundancy factor values depicted in Table 1. The calculation of the overstrength factor according to Eq. (3) is based on the use of nominal material properties and the actual overstrength factor should consider the beneficial contribution of some other effects [see e.g., Eq. (4)] (Uang 1991). For example, F1 may be used to consider the difference between actual and nominal static yield strengths, while F2 may represent the increase in yield stress as a result of the strain rate effect during a strong ground motion. Other parameters can also be included only if reliable data are available. In the current study, a factor of 1.37 is used to account for all these parameters (Fi) due to the application of wide-flange A36 steel sections for the design of structural members (SEAOC 2008).
3 FEM Modelling
3.1 Case Studies and Modelling Criteria
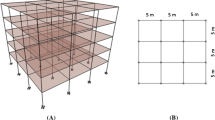
The steel moment resisting frames with 3, 6, 9 and 12-storeys and the bay length of 5 m and the storey height of 3.2 m are considered. The gravity and live loads of all floors are assumed to be 4.5 kN/m2 and 2 kN/m2, respectively. The earthquake design force is calculated according to ASCE07 (2016), considering the following parameters: importance factor Ie = 1 (for residential buildings: Risk Category II), Site Class D (stiff soil), Seismic Design Category D, response modification factor R = 4.5 and displacement amplification factor Cd = 4 (for intermediate SMRF). The buildings are assumed to be located in Berkeley, California (USA). The configurations of the models used in this study, as well as cross-sections of profiles, are presented in Fig. 2.

Configuration of MRF structures under investigation
Two kinds of nonlinearities (material and geometrical) are applied to the structures in the inelastic range of deformation. In particular, the geometrical nonlinearity of beam and column members is considered with P-delta effect. Herein, beam and column elements are modelled as nonlinear frame elements through the forceBeamColumn option of OpenSees. Fiber sections were assigned to these members to model the inelastic behaviour of the A36 steel material with the mechanical properties listed in Table 2. To this purpose, a stress–strain model of uniaxialMaterial Steel02 is chosen from the options of the OpenSees software.
Both ends of beam-column elements as well as the column supports are assumed to be moment resisting and rigid zones are assigned to the ends of members to have a proper rigidity of connections. The Raleigh damping with 5% damping ratio for first and second vibration modes is considered in the nonlinear time history analyses. The corresponding parameters for computing the damping are given in Table 3, where a0 and a1 are the Raleigh damping coefficients.
3.2 Failure Criteria
To evaluate reduction factors, a number of failure criteria are needed to define the collapse limit state of a structure. Two groups of failure criteria at local and global levels are utilized here to represent the collapse limit states of models.
A local criterion is defined based on the limitation of stress–strain behaviour of the material for structural elements. The strain limitation for A36 steel is considered to be as 20% (see Table 2).
On the other hand, the global failure criterion reaches when an upper limit of inter-story drift meet the specified value specified in the ASCE (2016) code for life safety performance level (2% of storey height) or when the overall instability of the structure happens.
4 Selection of Records
In 2007 Baker developed a quantitative classification procedure of pulse-like ground motions and 91 ground motions with large-velocity pulses were selected from approximately 3500 ground motions in the next generation attenuation (NGA) project ground motion library. It is well known that for the near-fault pulse-like ground motions, the pulse-like signals of the fault-normal direction are generally more pronounced than the fault-parallel direction (Somerville et al. 1997). Therefore, 20 pulse-like and 20 non-pulse-like fault-normal ground motions are selected from Baker (2007) (Tables 4 and 5, Figs. 3 and 4). The selected records are for moment magnitude (Mw) greater than 5. All records are taken from stations within 20 km of the fault rupture.

Velocity time histories of the selected pulse-like ground motions

Velocity time histories of the selected non-pulse-like ground motions
The Baker’s procedure is used to obtain a pulse period for each of the motions. The Baker’s pulse indicator index, which is one of the three criteria introduced by Baker for classifying the records as a pulse-like, is also brought for ground motions.
5 Analysis and Comparison of Results
The incremental dynamic analysis is carried out to evaluate the seismic behaviour of steel MRFs under near-fault ground motions. The resulted IDA analyses of 40 earthquakes mentioned in the previous section are depicted in Fig. 5. In this figure, the black curves represent the results of non-pulse-like ground motions, while the remaining curves are related to the pulse-like ground motions.

The capacity curves of 3- (a), 6- (b), 9- (c) and 12- (d) storeys MRFs based on IDA analyses
Figure 6 compares the collapse PGA of different models under pulse-like and non-pulse-like ground motions. As it can be seen, the structural failure, among other parameters, is influenced by characteristics of ground motions. It can be obtained that the structures can tolerate the higher intensity of PGA in ground motions with no pulse. It is evident that the difference between failure points increases with an increase in the height of structures.

Comparison among the failure PGAs from selected records
Aiming at better comparing the seismic behaviour of steel MRFs, four factors, namely overstrength, ductility, response modification and deflection amplification, are obtained under pulse-like and non-pulse-like ground motions. The extracted parameters of IDA curves and also the calculated seismic factors of the 3-storeys model are shown in Table 6.
The average results of seismic factors for all models are compared in Fig. 7. As it can be seen, with the increase of the height of structures, the overstrength factor of non-pulse like ground motions increases; while the ductility, response modification and, deflection amplification factors decrease. This finding is also obtained by other studies (Kim et al. 2009; Mahmoudi and Abdi 2012; Fanaie and Afshar 2014; Louzai and Abed 2015), but the results of the pulse-like ground motions do not obey this trend, since in pulse-like records the response of structures, among other parameters, are affected by both the period and the starting time of the pulse. In another word, if the period of the pulse and the period of the structures are enough closes each other, a resonance phenomenon may happen which gives rise to the earlier failure of structures.

Comparison among seismic factors of inspected MRFs under pulse-like and non-pulse-like ground motions: reduction factor due to ductility (a), overstrength factor (b), deflection amplification factor (c) and response modification factor (d)
As it is depicted in Fig. 7, the dissipative capacity of steel MRFs is decreased for pulse-like ground motions, whereas the opposite happens with non-pulse-like ones. The compared seismic factors in Fig. 7 show that overstrength, ductility and response modification factors of non-pulse-like ground motions differ from those related to pulse-like ground motions, even if in the case of deflection amplification factor the results are approximately the same.
The average results of overstrength, ductility, response modification and deflection amplification factors obtained from IDA analyses under non-pulse-like ground motions are about 2.47, 2.04, 5.05 and 2.85, respectively. The corresponding results under pulse-like ground motions are instead, 2.31, 1.81, 4.23 and 2.92. Comparing the results, the overstrength, ductility, response modification and deflection amplification factors obtained from non-pulse-like records are 1.07, 1.13, 1.19 and 0.98 times of the values of pulse-like records.
Figure 7 also compares the seismic factors with the corresponding suggested values of the ASCE provisions. The proposed values of overstrength, response modification, and deflection amplification factors in the ASCE provisions for examined steel MRFs are 3, 4.5 and 4, respectively. The procedure for obtaining overstrength and deflection amplification factors to provide adequate protection is based on a high estimate of the expected ratios between the maximum demand and the design one. Therefore, the system overstrength and deflection amplification factors are the largest average values of them for all performance groups (FEMA-P695 2009). In the case of response modification factors, the trend is the opposite, and the minimum value is suggested by the code. Considering this definition, the obtaining results for non-pulse ground motions are in good agreements with the recommended values of the ASCE code. As a consequence, it can be said that the proposed seismic factors are proper in the case of non-pulse-like ground motions. Investigating the obtained results of the non-pulse-like ground motions it is concluded that the recommended values for overstrength and deflection amplification factors are appropriately predicted, but the response modification factor must be properly reduced.
6 Conclusion
This paper tried to investigate the effect of near-fault ground motions on the performance of steel Moment Resisting Frames. To this purpose, FEM models of steel buildings with the different number of storeys (3, 6, 9, and 12) have been designed and analysed. Nonlinear incremental dynamic analyses have been performed under 40 near-fault ground motions, composed of 20 pulse-like and 20 non-pulse-like records. The results of the conducted research can be summarised as follows:
-
1.
The collapse PGAs of steel MRFs is higher than those of non-pulse-like ground motions.
-
2.
The values of overstrength factors obtained from non-pulse-like records are increased and the values of ductility, response modification, and deflection amplification factors are decreased with the increase in the height of structures. These trends are not kept for the corresponding values of pulse-like records.
-
3.
The obtained overstrength factor, the reduction factor due to ductility, response modification and deflection amplification factors based on IDA analyses under non-pulse-like ground motions are 2.47, 2.03, 5.05 and 2.85, respectively. These values are in good agreement with the suggested values of the ASCE provisions.
-
4.
The average overstrength factor, reduction factor due to ductility, response modification and deflection amplification factors based on IDA analyses under pulse like ground motions are 2.31, 1.81, 4.23 and 2.92, respectively. These values are from 1 to 1.20 times less underestimate than the corresponding ones related to the non-pulse like ground motions.
-
5.
The seismic factor suggested by ASCE seems to be appropriate for non-pulse-like ground motions, while the recommended response modification factor is not proper for pulse-like ground motions.
References
Alavi, B., & Krawinkler, H. (2004). Behavior of moment resisting frame structures subjected to near-fault ground motions. Earthquake Engineering and Structural Dynamics, 33(6), 687–706.
Archuleta, R. J., & Hartzell, S. H. (1981). Effects of fault finiteness on near-source ground motion. Bulletin of the Seismological Society of America, 71(4), 939–957.
ASCE 7. (2016). Minimum design loads for buildings and other structures. ASCE/SEI 7-16, Reston, VA, American Society of Civil Engineers.
ATC-19. (1995). Structural response modification factors. Redwood City: Applied Technology Council.
ATC-3-06. (1978). Tentative provisions for the development of seismic regulations for buildings. Redwood City: Applied Technology Council.
ATC-34. (1995). A critical review of current approaches to earthquake resistant design. Redwood City: Applied Technology Council.
Baker, J. W. (2007). Quantitative classification of near-fault ground motions using wavelet analysis. Bulletin of the Seismological Society of America, 97(5), 1486–1501.
Dabaghi, M. (2014). Stochastic modeling and simulation of near-fault ground motions for performance-based earthquake engineering. Berkeley: University of California.
Faggiano, B., Formisano, A., Vaiano, G. and Mazzolani, F. M. (2018). “Numerical Study on Moment Resisting Frames under Monotonic and Cyclic Loads.” Key Engineering Materials, 763, pp. 625–632, doi:10.4028/www.scientific.net/KEM.763.625, Switzerland: Trans Tech Publications.
Fanaie, N., & Afsar Dizaj, E. (2014). Response modification factor of the frames braced with reduced yielding segment BRB. Structural Engineering and Mechanics, 50(1), 1–17.
FEMA-P695 (2009). Quantification of building seismic performance factors. Washington D.C: Federal Emergency Management Agency.
Formisano, A., Landolfo, R., & Mazzolani, F. M. (2015). Robustness assessment approaches for steel framed structures under catastrophic events. Computers & Structures, 147, 216–228.
Halldorsson, B., & Papageorgiou, A. S. (2012). Variations of the specific barrier model part II: Effect of isochron distributions. Bulletin of Earthquake Engineering, 10(4), 1321–1337.
Kim, J., Park, J., & Kim, S. D. (2009). Seismic behavior factors of buckling-restrained braced frames. Structural Engineering and Mechanics, 33(3), 261–284.
Louzai, A., & Abed, A. (2015). Evaluation of the seismic behavior factor of reinforced concrete frame structures based on comparative analysis between non-linear static pushover and incremental dynamic analyses. Bulletin of Earthquake Engineering, 13(6), 1773–1793.
MacRae, G., Morrow, D., & Roeder, D. (2001). Near-fault ground motion effects on simple structures. Journal of Structural Engineering, 127(9), 996–1004.
Mahmoudi, M., & Abdi, M. G. (2012). Evaluating response modification factors of TADAS frames. Journal of Constructional Steel Research, 71, 162–170.
Mavroeidis, G. P., & Papageorgiou, A. S. (2010). Effect of fault rupture characteristics on near-fault strong ground motions. Bulletin of the Seismological Society of America, 100(1), 37–58.
SEAOC, Seismology Committee (2008). A brief guide to seismic design factors. Structure Magazine, September, pp. 30–32.
Sehhati, R., Rodriguez, A., ElGawad, M., & Cofer, W. (2011). Effects of near-fault ground motions and equivalent pulses on multi-story structures. Engineering Structures, 33(3), 767–779.
Shahi, S. K. and Baker, J. W. (2013). A probabilistic framework to include the effects of near-fault directivity in seismic hazard assessment. Pacific Earthquake Engineering Research Center.
Somerville, P. G., Smith, N. F., Graves, R. W., & Abrahamson, N. A. (1997). Modification of empirical strong ground motion attenuation relations to include the amplitude and duration effects of rupture directivity. Seismological Research Letters, 68(1), 199–222.
Uang, C. M. (1991). Establishing R (or RwRw) and CdCd factors for building seismic provisions. Journal of Structural Engineering, ASCE, 117(1), 19–28.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Taiyari, F., Formisano, A. & Mazzolani, F.M. Seismic Behaviour Assessment of Steel Moment Resisting Frames Under Near-Field Earthquakes. Int J Steel Struct 19, 1421–1430 (2019). https://doi.org/10.1007/s13296-019-00218-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13296-019-00218-2