
Abstract
Extended configurations of a short take-off and landing aircraft under investigation at the Coordinated Research Centre SFB 880 include a morphing droop nose and a tractor propeller engine. The short take-off and landing capabilities are achieved by circulation control via a high velocity jet over the flap leading edges utilizing the Coandǎ effect. The effect of the engine integration in combination with the blown flaps on the wing sizing, aerodynamic performance, and static wing deformation are of large interest. High-detail structural wing models are sized with a fully stressed approach using a partitioned fluid–structure interaction process. The aerodynamic part is covered by highly detailed computational fluid simulations. The effect of modeling the engine on the global and local aerodynamics for different levels of circulation control has a large impact. In addition, a change in flow separation behavior due to the engine effects is observed. The wing mass is only slightly increased by the detailed engine aerodynamics and the separation behavior changes slightly for the elastic wing. These findings show that the modeling of the engine will lead to a different stall behavior and allow for a higher lift, while the influence on the wing structure and aeroelasticity are very small.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The increasing air traffic requires improvements in aircraft design concerning fuel efficiency, noise reduction, and short take-off and landing (STOL) capabilities. The Sonderforschungsbereich (Coordinated Research Centre) SFB 880 is investigating an aircraft with STOL capabilities with a focus on noise reduction, new materials, and flight dynamics [17]. Transport airplanes with STOL capabilities have been investigated extensively by NACA/NASA. Their research focused on wind tunnel experiments in the ’50s [6] and flight tests in the ’60s [1]. An overview of all findings of the flight tests can be found in [10].

100 PAX SFB 880 aircraft in landing configuration
The aircraft illustrated in Fig. 1 uses high-pressure air blown through a slot in front of the high-lift devices for circulation control. This jet interacts with the boundary layer of the oncoming flow, thus introducing momentum. The increased momentum allows the flow to bend around the flap leading edge due to the Coandǎ effect. This effect had already been described by Thomas Young in 1800 [27] and it has been subject to research in the field of aerodynamics for several decades [13, 14, 26]. With this attached flow, even very high flap angles of around 65\(^\circ \) are possible resulting in higher lift coefficients. Consequently, lower approach speeds and shorter runway distances become possible.
Early research on a quasi-elliptical airfoil has shown that low-speed aeroelastic phenomena, namely low-speed flutter, can occur [8, 25]. This phenomenon also arose during the investigation of the earlier SFB 880 wing model [3, 22]. In contrast to high-speed flutter phenomena where the free stream velocity is the driving factor in combination with the wing elasticity, the free stream velocity has a small but supporting influence on the low-speed flutter depending on the angle of attack. In low-speed flutter, the major exciting source is the energy of the Coandǎ jet.
Different reference configurations are investigated and updated in the Coordinated Research Centre over the years. The detailed models of the first configuration had no leading edge devices and did not consider aerodynamic engine effects [21]. The updated reference configurations now include a droop nose and a tractor propeller engine. The droop nose allows for higher \(\alpha _{\textsf {max}}\), and the propeller slipstream will interact with the oncoming flow and the high-pressure jets. Both model extensions are expected to have an effect on the structural sizing and the static aeroelastic behavior of the wing.
After a short overview of the physical fundamentals of circulation control, the employed models and methods are presented. The results section is divided into three parts. First, the influence of droop nose and engine on the wing sizing is presented. Then, the effects of these model extensions on the aerodynamics of the rigid wing are discussed. Finally, the influence of the wing elasticity on the aerodynamics is investigated for the configuration changes.
This approach allows for a detailed evaluation of the impact of possible modeling simplifications like omitting engine or flexibility effects in this special context of a turboprop aircraft with active high-lift systems.
2 Physical fundamentals
This section gives a short overview of the Coandă effect and the principal aerodynamic characteristics of a blown flap system.

Typical 2D Coandă airfoil pressure distribution
Young stated that a thin jet is much more likely to follow a curved surface than the free stream flow [27]. This phenomenon known as Coandă effect today can be used to increase the lift of airfoils [4, 5]. This is generally achieved by a thin high-pressure jet of air to increase the velocity of the airflow over a curved trailing edge. Because the jet changes the circulation, the application to an aerodynamic profile is also called circulation control.
The introduced momentum and with it the amount of activated circulation control is represented by a momentum coefficient \(c_{\mu }\). This value describes the normalized jet momentum on the slot (cf. [7]) by setting the ratio of introduced jet momentum per time at the jet exit section \(\dot{m}_{\mathrm{jet}}v_{\mathrm{jet}}\), where \(\dot{m}_{\mathrm{jet}}\) is the mass flow and \(v_{\mathrm{jet}}\) the velocity of the jet, in relation to the freestream dynamic pressure \(q_{\infty }\) and the wing reference area: \(A_{{ref}}\)
Even small momentum coefficients can influence the boundary layer to the point that the flow stays attached slightly longer. This attached flow results in higher lift. However, the increase in lift is not a linear function of the momentum coefficient. At low \(c_\mu \) values, the increase in lift is high due to an increase in attached flow. When the flow is attached on the whole airfoil, the optimal domain of circulation control is reached. Past this point, an increase in jet momentum yields only small returns in lift. This domain is called super-circulation.
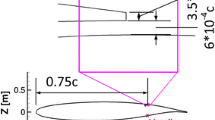
A typical pressure distribution for optimal circulation control is shown in Fig. 2. The corresponding profile with flap at an angle of \(\delta _{\mathrm{fl}}=65^\circ \) is depicted at the top of the graph. The introduced suction area behind the slot corresponds to the Coandă surface starting at \(x/c=0.75\).

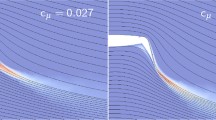
Boundary layer–jet interaction
The interaction of the jet with the boundary layer is illustrated in Fig. 3. The figure shows the dependence of the eddy viscosity on the distance to the wall. Boundary layers of three angles of attack are plotted at the positions in front of and behind the slot. An increase in momentum and a reduction in boundary layer thickness are recognizable for all angles of attack.
3 Models
The considered numerical models are based on the wing of the SFB 880 high wing monoplane aircraft in REF2–2013 reference configuration. The wing has a halfspan of 14.385 m, a sweep angle of 9\(^\circ \), a taper ratio of 0.38, and a dihedral angle of \(-2^\circ \). The six leading edge high-lift devices, realized as morphing droop noses, account for the first 20% of the wing chord. The six plain flaps, of which the outboard flap has an aileron function, account for 25% of the chord starting at 75%. 86% of the wing span is equipped with high-lift devices, starting at 9.83% of the wing span. The engine is positioned at 35% of the half-wing span.
3.1 Structure
The detailed structural models which are sized and later used in the aeroelastic computations consist of beam-stiffened shell structures modeled for the ANSYS® solver. A finite-element model of the wing with deflected high-lift devices and engine nacelle is shown in Fig. 4. The main structural elements, namely, skin, ribs, and spars, are modeled by shell elements. Stiffening elements like stringers are modeled by beam elements that are connected to the shell elements. Additional beam elements are included for bending and shear stiffness on the surface element edges, for example rib and spar chords and end caps around the rib and spar elements. Fuel masses are represented by individual mass points in each rib section and are adjusted to the local available section volume. The masses are attached to the wing box by RBE3 elements that distribute the volume forces from the mass points to the surrounding rib structures. The compressor systems located between the second and third spar are also modeled as mass points and are attached in the same way to the structure. All trailing edge devices are connected with beam struts to the wing box structure via multi-point constraints. The engine is modeled as a mass point that is attached to the wing structure with rigid beam elements. The nacelle, spinner, and propeller disk elements are coupled to the engine mass point. These elements provide the structural surface counterpart to the aerodynamic surface grid to collect the aerodynamic forces. In total, the structural model has around 4\(\times \)10\(^5\) degrees of freedom.

FE wing model in landing configuration
A layered composite material is used for the shell structures. T300 15 k/976 unidirectional tape is used as ply material. The plies are stacked in a \([90/-45/+45/0]_\mathrm {S}\) sequence. The beam elements’ material is a simplified isotropic material whose material constants are derived from a quasi-isotropic layup [21]. The corresponding material properties and failure limits listed in Table 1 are taken from [24].
3.2 Aerodynamics
Several different hybrid grids are used for the aerodynamic computations. The first distinction between them is the cruise and landing configuration, both used for the load case computations. In the cruise grids, all high-lift devices are retracted. In the landing grid, the morphing droop nose devices are set to a deflection angle of 90\(^\circ \), the plain flaps to \(\delta _{\mathrm{fl}}=65^\circ \) and the aileron to 45\(^\circ \). The second distinction is the inclusion of the engine nacelle and actuator disk to account for engine effects in both configurations.
The grids in landing configuration have, depending on the modeling of the engine, between 133\(\times \)10\(^6\) and 145\(\times \)10\(^6\) cells (40e6\(\times \)10\(^6\) and 43\(\times \)10\(^6\) points) of which 35% are in the boundary layer due to high resolution at the high-lift devices and Condǎ slot. The approach simulations are performed at Reynolds numbers around 12\(\times \)10\(^6\), using the mean aerodynamic chord of 3.428 m as the Reynolds length. The cruise configurations amount to 84\(\times \)10\(^6\) and 93\(\times \)10\(^6\) cells (20\(\times \)10\(^6\) and 23\(\times \)10\(^6\) points) with around 20% in the boundary layers. The Reynolds numbers during cruise simulations vary between 20\(\times \)10\(^6\) and 28\(\times \)10\(^6\) depending on altitude and velocity.

3D CFD surface mesh in landing configuration
A surface mesh in landing configuration with engine is shown in Fig. 5. The actuator disk models six propeller blades that rotate at 975 rpm. The aerodynamic characteristics of the configuration without engine nacelle [11] and with engine nacelle [12] have been thoroughly investigated.
The numerical flow simulations are performed with the DLR TAU code of the German Aerospace Center [20] which uses an unstructured finite volume approach to solve the Reynolds-averaged Navier–Stokes equations (RANS). The implicit Lower–Upper Symmetric-Gauss-Seidel (LUSGS) scheme is used for time stepping and a second-order central scheme is employed for spatial discretization of the convective fluxes. Turbulence is modeled with the original Spalart–Allmaras model [23].
4 Methodology
This section details the employed approaches and algorithms for the structural sizing method and the fluid–structure interaction process.
4.1 Sizing method
The wing structure is sized following a fully stressed design approach. This somewhat dated approach is used as a continuation of preceding work to allow a direct comparison with established wing sizing results and findings from the preliminary aircraft design. Table 2 lists 12 load cases used during sizing with the corresponding flow state, load factors, aircraft configuration, tank volume, and engine thrust. The aerodynamic loads are computed for the rigid wing and are coupled to the structural model for each load case by a one-step load transfer. Configurations with engine nacelle include the change in aerodynamics due to engine downwash.
The shell and beam dimensions are then adapted based on failure indices which respect several different failure cases. The failure cases include yield strength for isotropic sections, the Puck failure criterion for laminated shells, as well as buckling strength for both laminated shell [18] and isotropic beam structures. Buckling failure indices are reduced by taking the cube root to account for the dependence of the buckling strength on the third power of the skin thickness. The Puck criterion considers both fiber and inter-fiber fracture [16]. In addition, the material properties are reduced by a material utilization factor to account for structural reliability and damage tolerance effects. A safety factor of 1.5 is applied to all strains on the wing.
The dimensions of the structural components are adapted by a factor f resulting from the failure indices. This factor is applied to isotropic shell and laminate ply thicknesses as well as beam cross-sectional areas. The adaptation of the dimensions obeys the following rule [15] for an increasing or decreasing factor f
The failure index \({\mathrm{FI}}\) is the maximum value of all failure cases of the considered component. To prevent overshoots due to high initial failure indices, the adaptation of the dimensions is limited to a maximum change of 30%. During the first iterations of the sizing process, averaged component strains are used for the failure index calculation to smooth out high unphysical strains in the unsized model. In addition, the sectional dimensions of each component are smoothed by the dimensions of the neighboring sections. When convergence in relative mass change is below 0.1% the use of the maximum component stresses is enabled to adapt the sections. Smoothing is still performed but only allows an increase in dimensions. Final convergence is reached when not only the relative mass change is below 0.25% but also all component failure indices are smaller than 1.0.
4.2 Aeroelastic coupling
The fluid–structure interaction (FSI) process follows a partitioned approach using the framework of the in-house ifls coupling environment [9]. ifls provides coupling techniques for nonconforming grids and numerical algorithms for the analysis of nonlinear and transient FSI problems. The process of a strong coupling strategy based on the Dirichlet–Neumann scheme is employed during load transfer for the sizing computations as well as during the aeroelastic analyses. The interpolation of the boundary conditions is performed with a transfer matrix \(\mathbf {H}\) according to a method based on finite-element shape functions:

ifls coupling process
The coupling process is illustrated in Fig. 6. On the coupling interfaces, the fluid displacements \(\mathbf {u}_{f,\Gamma }\) result from the structural displacements \(\mathbf {u}_{s,\Gamma }\) and the structural forces \(\mathbf {f}_{s,\Gamma }\) are transferred from the fluid forces \(\mathbf {f}_{f,\Gamma }\). The derivation of the coupling matrix is described in [9]. The propagation of the fluid surface deformation into the fluid volume is performed with a mesh deformation procedure based on radial basis functions [19].
5 Results
In the following, the sized wings are compared. The change in aerodynamics due to the inclusion of the droop nose and the engine in the CFD models is presented. Finally, the influence of wing elasticity on the configurations is discussed.
5.1 Wing sizing
In Fig. 7, the convergence of the wing sizing is illustrated. The mass for the wing without engine \(m_{\mathrm{NE}}\) (\(\mathrm{NE}\) standing for no engine) and with engine nacelle \(m_{\mathrm{WE}}\) (WE standing for with engine) is plotted over the number of iterations. In addition, the absolute relative mass change \(|\Delta m |\) and the maximum sizing failure index \(\mathrm{FI}\) is plotted for both configurations. The wing sizing starts for the configurations with minimal skin thicknesses of 1 mm and low stiffener dimensions resulting in a total wing mass of about 1000 kg.

Wing mass convergence
The first iterations are characterized by very high mass changes which are congruent with the high expected strains on the unsized aircraft structure as can be seen by the large maximum failure indices. After five iterations, a maximum is reached above 3500 kg and the mass change stabilizes below 5%, while the maximum failure index settles around values of 1.1. After the fifth iteration, the configuration with engine shows a higher mass at 3544.43 kg, which is a difference of 30.49 kg compared to the configuration without engine. After several additional iterations the mass change falls below 0.1%, which can also be seen from the stabilization of the total wing masses. The mass difference increases slightly during this process to 42.15 kg with \(m_{\mathrm{NE}}=3191.26\,\mathrm{kg}\) and \(m_{\mathrm{WE}}=3233.41\,\mathrm{kg}\).
The second sizing phase using the maximum instead of the average component stresses is enabled for the configuration with engine at iteration 14 and for the configuration without engine at iteration 15. The maximum component stresses result in an immediate mass increase of around 2%. After eight additional iterations, convergence of both configurations is reached with the maximum failure index \(\mathrm{FI}<1\) and a relative mass change of \(|\Delta m|<0.25\%\). The final wing masses are \(m_{\mathrm{NE}}=3340.57\,\mathrm{kg}\) and \(m_{\mathrm{WE}}=3397.39\,\mathrm{kg}\) with a difference of 56.82 kg or 1.7%. Differences in dimensions of the two configurations are small. In Fig. 8, the wing deflection of load case 2 and 12 in landing configuration with engine is shown. The wing tip deflections of the sized model are 0.433 and −0.115 m.

Wing deflection of load case 2 and 12

Skin sizing load cases

Ribs and spars’ sizing load cases
The dimensioning load cases for each component section are illustrated with different colors in Fig. 9 for the top and bottom skin parts and in Fig. 10 for the ribs and spars. The numbers indicate the load case number as listed in Tab. 2 for the shell and beam elements. On the top skin, the major dimensioning load cases are the high-speed maneuver in cruise configuration and the low-speed maneuver case with extended flaps. On the bottom skin, the ground cases and a cruise-speed gust case are dimensioning.
The maneuver and gust cases are also the major conditions to size the spar dimensions. The ribs have different major load cases. The outboard wing box ribs are dimensioned for high-speed maneuver and a ground case with extended flaps. The inboard ribs are dimensioned with the loads of a medium-speed maneuver, gust, and a ground case. High-speed cases are adapted to the high-speed maneuver and a ground case with extended flaps. The inboard and outboard flaps are adapted following the loads of the high-speed maneuver, while the middle flaps are sized based on the medium-speed gust case loads.

Wing skin thickness

Wing rib thickness
The resulting component thickness distribution is illustrated in Figs. 11 and 12. A top skin thickness of about 5.0 mm is found in the center of the wing box. Close to the spars, an increase in thickness is notable due to an increase in shear forces leading to earlier buckling as well as a slight increase in buckling field dimensions due to the modeling. The bottom skin is slightly thinner with an average thickness of 3.5 mm on the wing box. The segmented leading edge devices mainly support aerodynamic loads which lead to a thinner skin thickness of 1.5 mm. Spoiler and flaps also only support aerodynamic loads, where the flap leading edge is additionally loaded with the Coandǎ forces. This results in partially thicker flap top skin thicknesses of around 3.0 mm, while most of the other parts of the trailing edge devices have thicknesses between 1.0 and 2.0 mm.
The thickness decreases from 5 mm inboard to 1.5 mm outboard on the first spar and from 4.0 to 1.5 mm on the second spar. A high thickness of up to 7.0 mm occurs near the wing-fuselage intersection due to large shear forces inducing buckling of the spar web. The third spar is not an integral part of the wing box but is used to partially connect the flaps. The thickness of this spar decreases from 3.5 to 1.5 mm at the third flap. The leading edge ribs transfer the nose forces into the wing box with a thickness between 4.6 and 4.0 mm. The wing box ribs are sufficiently sized for the introduced lifting forces and resulting shear loads with a thickness of 3.5 mm. Flap elements are limited by the specified minimum thickness.
5.2 Installation effects of droop nose and engine
The installation effects without consideration of any wing flexibility are presented in the following. The configuration “clean nose” uses trailing edge high-lift devices without any leading edge devices. The nose shape is the same as during cruise flight. The second configuration “droop nose” is expanded with a 45\(^\circ \) extended droop nose. The engine is included in the third configuration “with engine” and adds an engine nacelle and actuator disk to the second configuration.
5.2.1 Global influence
Figure 13 illustrates the aerodynamic performance in lift, drag, and pitching moment for approach conditions (\(Ma=0.15\), \(H = 0km\)). The results are presented for the three domains circulation control, optimal circulation, and super-circulation. Due to small differences in the computational grids without and with droop nose the momentum coefficient \(c_\mu \) differs. Therefore, optimal circulation is indicated with \(c_\mu =0.033\) on the grid without droop nose and with \(c_\mu =0.03\) on the others. The same is true for the domains of circulation control (\(c_\mu =0.0243\) and \(c_\mu =0.02\)) as well as super-circulation (\(c_\mu =0.045\) and \(c_\mu =0.04\)). The clean nose configuration reaches \(c_{L,\textsf {max}}\) at \(\alpha =5^\circ \) to 7\(^\circ \), as shown in Fig. 13a. The increase in lift from \(c_\mu =0.033\) to \(c_\mu =0.045\) is smaller than between \(c_\mu =0.0243\) and \(c_\mu =0.033\).

Total installation effects during approach
Including the droop nose shifts \(\alpha _{\textsf {max}}\) to higher values as expected. The shift amounts to at least 16\(^\circ \) for the lowest \(c_\mu \) and reaches 19\(^\circ \) for the higher values of \(c_\mu \), increasing \(\alpha _{\textsf {max}}\) to 24\(^\circ \). Although \(c_{L,\textsf {max}}\) is not increased for the lowest momentum coefficient, at \(c_\mu =0.03\) and \(c_\mu =0.04\), the lift increases by 5 and 8%, respectively. In addition, the stall is more moderate with small increases in leading edge separations. At the highest \(c_\mu =0.04\) and \(\alpha =25^\circ \), the lift drops slightly due to the development of an inboard flow separation. The drag at \(c_{L,\textsf {max}}\) grows by about 14% at the lowest \(c_\mu \) and 25% for the other ones. Higher angles of attack lead to a reduction in pitching moment at \(c_{L,\textsf {max}}\) of about 85% at the lowest \(c_\mu \), and 78% as well as 70% for \(c_\mu =0.03\) and \(c_\mu =0.04\), respectively.
The addition of the engine strongly influences the surface flow over parts of the wing. Increases in local velocity due to the thrust increase the local lift coefficients. This leads to higher global lift but also to an earlier and more distinct loss of lift after \(c_{L,\textsf {max}}\). \(\alpha _{\textsf {max}}\) is reduced to 19\(^\circ \) to 20\(^\circ \) for all \(c_\mu \) cases. The gains in lift compared to the droop nose configuration are 17, 19, and 26% for the increasing \(c_\mu \) values. Even with flow separations occurring inboard the lift is around 3% higher than without engine due to the added flow energy. A further drop in lift is noticeable as a second outboard separation occurs at the highest momentum coefficient \(c_\mu =0.04\) and \(\alpha =25^\circ \) which reduces the lift coefficient to around 2.9.
The engine has a large effect on the drag which rises by 72– 80% at \(\alpha _{\textsf {max}}\), as shown in Fig. 13b. Figure 13c presents a general increase in pitching moment due to the increase in lift on the trailing edge generated through the engine flow.

Surface stream lines and friction coefficient \(c_f\) for variable \(c_\mu \) and \(\alpha _{\textsf {max}}\)
For reference, the surface stream lines and the surface friction coefficient \(c_f\) are plotted in Fig. 14 for all three configurations with different momentum coefficients \(c_\mu \) at the respective \(\alpha _{\textsf {max}}\). For all configurations in the domain of circulation control, partially detached flow is noticeable on the flaps due to the low \(c_\mu \). At optimal circulation control, the flow stays attached on the whole flap. A further increase in \(c_\mu \) results in higher boundary layer interaction and a reduction in the size of the separation bubble on the flaps behind the engine. It is notable that a partial leading edge separation at optimal circulation conditions for the model without droop nose has only a marginal effect on the global lift. This effect also arises for lower and higher momentum coefficients locally at the nose.
5.2.2 Local influence
The effect of the model extensions on the local lift coefficient is shown in Fig. 15a. The configurations are plotted for the three different \(c_\mu \) values at angles of attack close to \(\alpha _{\textsf {max}}\). The with engine-configurations are analyzed at the same angle of attack as the model with droop nose to allow for a better comparison of the influence of the engine and nacelle. All models show a larger increase between circulation control and optimal circulation compared to optimal circulation to super-circulation, which is expected due to the diminishing efficiency of higher jet momentum after the flow is attached on the whole flap. The models without droop nose show a smooth trend with a maximum value for the local lift coefficient of around 4.3. The addition of the droop nose and, as a consequence thereof, the change in \(\alpha \) to higher angles result in lower local lift near the fuselage and a drop in lift at \(\eta =0.82\) due to a slightly different computational grid compared to the first configuration. Furthermore, the configuration without droop nose has a blended fillet instead of a gap between flaps and aileron. The figure shows higher lift in the middle of the wing and lower lift near the fuselage and near the wing tip when comparing the models with and without droop nose.

Local installation effects during approach

Wake behavior at \(\alpha _{\textsf {max}}\), vorticity \(\omega = 1\)

Installation effects during approach on local \(c_{l}\) at flow separation

Surface stream lines and friction coefficient, \(\alpha =\) 21\(^\circ \) and 25\(^\circ \), \(c_\mu =0.04\)

Flow separation, \(\alpha =\) 21\(^\circ \) and 25\(^\circ \), \(c_\mu =0.04\), vorticity \(\omega = 1\)
By extending the model with the engine, the local lift is changed significantly. The graphs are separated in lift on the wing and lift on the engine nacelle. In both cases, the normalization is performed with the local wing chord. An increase in local lift coefficient up to a value of 5.3 can be observed in the influence region of the propeller slipstream ranging from \(\eta =0.176\) to \(\eta =0.524\). In the region of the nacelle, the lift on the wing is reduced due to a separation on the flap resulting from the high energy slipstream. Higher \(c_\mu \) values partially reattach this flow recovering some lift. The additional lift generated on the nacelle shows a sudden drop at \(\eta =0.32\) due to the inboard strake generating a vortex to reduce the vortices generated at the nacelle–wing interface and thus improving overall lift. Due to the higher angles of attack, the fuselage (up to about \(\eta =0.12\)) generates additional lift. The engine flow also influences the flow on the rear fuselage that significantly increases the lift for the engine configuration. The change in skin friction on the fuselage behind the wing can be seen in Fig. 14. The engine flow in combination with the increased blowing also has an increasing effect between \(\eta =0.55\) and \(\eta =0.8\). In combination, this explains the significant increase in lift for the configuration with engine, cf. Fig. 13a.
The local drag coefficients are shown in Fig. 15b for the same configurations. The configurations without and with droop nose are comparable, except for the small drop in drag at the flap-aileron position at \(\eta =0.82\). The configuration with engine shows a large increase in drag in the region of the propeller slipstream (\(\eta =0.176\) to \(\eta =0.524\)) and due to 3D effects up to \(\eta =0.58\). On one hand, this is based on high turbulence induced by the propeller slipstream and the consequential separation on the plain flaps. On the other hand, the engine nacelle adds considerable drag. Comparing the skin friction coefficients in Fig. 14 for the models with and without engine clearly shows the region in which the drag is increased. This local increase in drag is more than doubles the global drag, as shown in Fig. 13b.
The wake behavior for all three configurations at their respective \(\alpha _{\textsf {max}}\) is illustrated in Fig. 16 for optimal circulation control (\(c_\mu =\{0.033,0.03\}\)). The wake is represented by vorticity isosurfaces with \(\omega = 1\). Both models without engine show an undisturbed attached flow that separates at the end of the trailing edge devices. The lower angle of attack results in a stable wake originating at the wing-fuselage intersection for the model without droop nose. The large turbulence on the model with droop nose shows a local reduction in lift between \(\eta =0.15\) and \(\eta =0.25\) compared to the first model. Incorporating the engine introduces a large perturbation. The wakes from the propeller, engine nacelle, and separated flow behind the engine increase the vorticity.
5.2.3 Stall effects
Cases of local flow separation for optimal and super-circulation are graphed in Fig. 17. For the configuration without droop nose, leading edge flow separation resulting in a local drop in lift occurs at 5\(^\circ \) around \(\eta =0.7\). The inclusion of the leading edge device significantly reduces the abrupt nature of the drop in lift. Partial flow separation occurs at 25\(^\circ \) around \(\eta =0.35\) and \(\eta =0.6\) for \(c_\mu =0.03\). The higher \(c_\mu =0.04\) only shows a small drop in local lift between \(\eta =0.3\) and \(\eta =0.5\) at 25\(^\circ \). The with engine-configuration shows an inboard flow separation between \(\eta =0.15\) and \(\eta =0.25\) at 21\(^\circ \) for all momentum coefficients due to the induced angle of attack of the propeller slipstream. At lower \(c_\mu \) and 25\(^\circ \), some partial separations occur next to the engine slipstream at \(\eta =0.6\), and a complete outboard separation emerges for \(c_\mu =0.04\) with a large drop in local lift between \(\eta =0.45\) and \(\eta =0.95\).
The flow separation on the models with engine is caused by an inboard separation on the nose due to the high induced angle of attack of the engine slipstream. Figure 18 illustrates the surface stream lines and the friction coefficient \(c_f\) on the top wing surface for \(\alpha =21^\circ \) and \(\alpha =25^\circ \) for \(c_\mu =0.04\), cf. Fig. 13a. In addition, Fig. 19 shows the change in wake shapes. The small local inboard separation between the engine slipstream and the oncoming flow extends significantly inboard and outboard to a width of about 10% of the half span. The local lift reduction reaches values between 35 and 48% between \(\eta = 0.12\) and \(\eta = 0.25\). Local lift is also reduced starting at \(\eta = 0.4\) by 6% and declining to \(\eta = 0.75\). At 25\(^\circ \), the lift again drops significantly due to a leading edge separation between \(\eta = 0.5\) and \(\eta = 0.95\). The high momentum coefficient assures that the partial flow stays attached on the flaps.
5.3 Sensitivities due to wing elasticity
The influence of the wing elasticity on the aerodynamics in conjunction with the circulation control is presented in the following. Here, full FSI simulations are performed to reach the aerodynamic equilibrium. An example of wake effects of the flexible wing is shown in Fig. 20. Here, the wing tip of the jig shape is shown in gray below the deformed wing tip.
The wing tip deflection and wing tip twist angle for the static aeroelastic equilibrium are plotted in Fig. 21 for the approach case (\(Ma=0.15\), \(H = 0\) km) of the three configurations with variable \(c_\mu \). The z-deflection is in the range of 0.13–0.36 m and the wing tip twist between \(-0.67^\circ \) and \(0.03^\circ \). The models with droop nose show the largest ranges and the models with engine show steeper gradients due to the higher gradients in lift. Drops in deflection and twist after the corresponding \(\alpha _{\textsf {max}}\) conform to the aerodynamic performance plots. For higher angles of attack, the wing twist values are reduced and later inverted because of the reduction and reversal of the pitching moments. The wing tip deflection increases almost linearly up to \(\alpha _{\textsf {max}}\) for most of the configurations. The model without droop nose shows an earlier reduction in deflection for the lowest \(c_\mu \).

Wake behavior of flexible wing, vorticity \(\omega = 1\)

Wing deformation for approach configurations
Figure 22 shows the aerodynamic performance in lift separately for the three configurations of the rigid and flexible wing for the approach case. Because both the wing sweep angle and the resulting wing deflections are small, the changes in lift are expected to be minor. A slightly higher lift is attained for the flexible models compared to the rigid ones. The differences increase up to the respective \(\alpha _{\textsf {max}}\) values. Some reductions in lift compared to the rigid engine configurations, e.g., at \(\alpha =16^\circ \) in Fig. 22c, are due to a local inboard lift reduction on the fuselage as well as on the wing-fuselage fairing.
The configuration without droop nose shows a change in stall behavior. Here, in all cases, leading edge stall occurs. The maximum increase in lift is 0.83% at \(\alpha _{\textsf {max}}\). However, as shown for the wing tip deflection, the lowest \(c_\mu \) shows a reduction in lift beginning 5\(^\circ \) earlier. This separation occurs due to the wing elasticity. In addition, the case with \(c_\mu =0.033\) is on the threshold of flow separation. At \(\alpha =\) 6\(^\circ \), the rigid configuration shows a small partial leading edge separation resulting in the reduction in lift. The flexible wing is already separated at \(\alpha =\) 6\(^\circ \), because the wing twist leads (cf. Fig. 21b) to an increase in local angle of attack, resulting in earlier stall.
The configuration with droop nose but without engine again shows a very stable behavior. Rigid and flexible wing shows comparable performance. Leading edge stall does not occur with this configuration, and thus, the instabilities of the previous one do not occur. The difference in lift at \(\alpha _{\textsf {max}}\) is 0.78%.

Influence of wing elasticity during approach
The configuration with engine effects shows larger differences due to wing elasticity. The largest difference is 1.04% at \(\alpha _{\textsf {max}}\). Independent of the momentum coefficient \(c_\mu \) stall occurs earlier. At optimal and high momentum coefficient, the second separation occurs earlier, as well. The separation effects stay the same with a leading edge stall inboard of the propeller slipstream followed by outboard separation. Although the wing deflection is small, it has an influence on the nacelle and propeller position. The thrust vector tilts by about 1\(^\circ \) mainly around the y-axis. Combined with the wing deflection of about 2.2 cm and a negligible wing twist of 0.01\(^\circ \) at the position where the leading edge stall originates, this can lead to earlier instabilities. Thus, the local increase in angle of attack, mostly due to the engine slipstream, results in earlier stall effects. The local coefficients show only very small differences to the rigid results.
6 Conclusions
In this paper, the effects of model extensions, namely introduction of a droop nose and propeller engine, on the wing sizing and aerodynamics of the rigid and flexible wing of a circulation controlled aircraft are presented.
The considered wing structure is detailed with leading and trailing edge devices and stiffener elements. Aerodynamics are computed on large RANS CFD computational grids specifically considering the boundary layer resolution on the Coandǎ flap. The fluid–structure interaction used for load coupling and to compute the static aeroelastic equilibrium follows a partitioned approach.
The composite wing is sized against multiple load cases with a fully stressed design approach. The inclusion of the aerodynamic engine loads results in a less than 2% higher wing mass and otherwise comparable dimensioning load cases.
The influence of the model extensions on the aerodynamics is large as expected. Adding a droop nose allows for higher angles of attack for all values of \(c_\mu \) with a very stable flow and small increases in global lift. The drop in lift after \(\alpha _\textsf {max}\) is delayed when compared to the sudden drops observed with the model without leading edge devices. The local separations grow significantly slower with droop nose.
Extending this model with a tractor propeller engine leads to a large increase in lift for all values of \(c_\mu \) during approach due to the high energy propeller slipstream. At \(\alpha _{max}\), the increase amounts to about 25%. With this, an inboard separation occurs at lower angles of attack due to engine slipstream induced angles of attack. However, this drop in lift still results in larger lift when compared to the configurations without engine. At higher angles of attack and high momentum coefficient, a second separation arises on the whole outboard wing.
The investigation of wing elasticity shows only marginal deviations from the results of the rigid models concerning aerodynamic performance. This small effect can be attributed to the low wing sweep angle and the corresponding small wing deflections. Because of the reduction in pitching moment at higher angles of attack for the model with droop nose, the local wing tip twist is similarly reduced. Consequently, these models show no change in \(\alpha _\textsf {max}\)-like selected models without droop nose.
The obtained structural models will be used in the model extension of a ROM which is based on modal reduction of the structure [3]. The aerodynamic results will be employed for the verification and 3D correction of the modified aerodynamic lifting-line approach of the ROM concerning droop nose and engine. The ROM is employed for low-speed flutter prediction as well as a part of a flight mechanics module [2].
References
Deal, P., Grunwald, K.J., Hall, A.: Flight investigation of performance characteristics during landing approach of a large powered-lift jet transport. Tech. rep. (1967)
Diekmann, J.H., Hahn, K.U.: Effect of an active high-lift system failure during landing approaches. CEAS Aeronaut. J. 6(2), 181–196 (2015)
Dinkler, D., Krukow, I.: Flutter of circulation-controlled wings. CEAS Aeronaut. J. 6(4), 589–598 (2015). https://doi.org/10.1007/s13272-015-0166-z
Englar, R.J., Smith, M.J., Kelley, S.M., Rover III, R.C.: Application of circulation control to advanced subsonic transport aircraft. Part I-airfoil development. J. Aircr. 31(5), 1160–1168 (1994). https://doi.org/10.2514/3.56907
Englar, R.J., Smith, M.J., Kelley, S.M., Rover III, R.C.: Application of circulation control to advanced subsonic transport aircraft. Part II-transport application. J. Airc. 31(5), 1169–1177 (1994). https://doi.org/10.2514/3.46627
Griffin Jr, R.N., Holzhauser, C.A., Weiberg, J.A.: Large-scale wind-tunnel tests of an airplane model with an unswept, aspect-ratio-10 wing, two propellers, and blowing flaps. Tech. rep. (1958)
Haas, D., Chopra, I.: Static aeroelastic characteristics of circulation control wings. J. Aircr. 25(10), 948–954 (1988). https://doi.org/10.2514/3.45684
Haas, D., Chopra, I.: Flutter of circulation control wings. J. Aircr. 26(4), 373–381 (1989). https://doi.org/10.2514/3.45770
Haupt, M., Niesner, R., Unger, R., Horst, P.: Computational aero-structural coupling for hypersonic applications. In: 9th AIAA/ASME joint thermophysics and heat transfer conference, pp. 5–8 (2006). https://doi.org/10.2514/6.2006-3252
Innis, R.C., Holzhauser, C.A., Quigley, H.C.: Airworthiness considerations for stol aircraft. Tech. rep. (1970)
Keller, D.: Numerical approach aspects for the investigation of the longitudinal static stability of a transport aircraft with circulation control. In: New results in numerical and experimental fluid mechanics IX, pp. 13–22. Springer, Berlin (2014). https://doi.org/10.1007/978-3-319-03158-3
Keller, D., Rudnik, R.: Numerical investigation of engine effects on a transport aircraft with circulation control. J. Aircr. 52(2), 421–438 (2015). https://doi.org/10.2514/1.C032724
Korbacher, G.: Aerodynamics of powered high-lift systems. Annu. Rev. Fluid Mech. 6(1), 319–358 (1974). https://doi.org/10.1146/annurev.fl.06.010174.001535
Lighthill, M.: Notes on the deflection of jets by insertion of curved surfaces, and on the design of bends in wind tunnels. Reports and memoranda 2105, Aeronautics Research Council (1945)
Österheld, C.M. (ed.): Physikalisch begründete Analyseverfahren im integrierten multidisziplinären Flugzeugvorentwurf. Shaker (2004). Doctoral dissertation
Puck, A., Schürmann, H.: Failure analysis of frp laminates by means of physically based phenomenological models. Compos. Sci. Technol. 58(7), 1045–1067 (1998)
Radespiel, R., Heinze, W.: SFB 880: fundamentals of high lift for future commercial aircraft. CEAS Aeronaut. J. 5(3), 239–251 (2014). https://doi.org/10.1007/s13272-014-0103-6
Rao, A.R.M., Arvind, N.: A scatter search algorithm for stacking sequence optimisation of laminate composites. Compos. Struct. 70(4), 383–402 (2005). https://doi.org/10.1016/j.compstruct.2004.09.031
Rendall, T., Allen, C.: Efficient mesh motion using radial basis functions with data reduction algorithms. J. Comput. Phys. 228(17), 6231–6249 (2009). https://doi.org/10.1016/j.jcp.2009.05.013
Schwamborn, D., Gardner, A., von Geyr, H., Krumbein, A., Lüdecke, H.: Development of the DLR TAU-code for aerospace applications. In: Proceedings of the international conference on aerospace science and technology, pp. 26–28. Bangalore, India (2008)
Sommerwerk, K., Haupt, M.: Design analysis and sizing of a circulation controlled CFRP wing with Coandă flaps via CFD-CSM coupling. CEAS Aeronaut. J. 5(1), 95–108 (2014). https://doi.org/10.1007/s13272-013-0093-9
Sommerwerk, K., Krukow, I., Haupt, M., Dinkler, D.: Investigation of aeroelastic effects of a circulation controlled wing. AIAA Journal of Aircraft (Advance online publication), 1–11 (May 20, 2016). https://doi.org/10.2514/1.C033780
Spalart, P., Allmaras, S.: A one-equation turbulence model for aerodynamic flows. AIAA Paper 92-0439 (1992). https://doi.org/10.2514/6.1992-439
U.S. Department of Defense: MIL-HDBK-17-2F: Composite materials handbook. Polym. Matrix Compos. Mater. Prop. 2, 152–163 (2002)
Wilkerson, J.: Aeroelastic characteristics of a circulation control wing. Tech. Rep. 76-0115, David W. Taylor Naval Ship Research and Development Center (1976). https://doi.org/10.2514/3.45684
Wood, N.: Circulation control airfoils—past, present, future. Tech. Rep. 85-0204, AIAA (1985). https://doi.org/10.2514/6.1985-204
Young, T.: Outlines of experiments and inquiries respecting sound and light. Philos. Trans. R. Soc. Lond. 90, 106–150 (1800)
Acknowledgements
The authors gratefully acknowledge the funding as part of the Coordinated Research Center 880 provided by the German Research Foundation (Deutsche Forschungsgemeinschaft—DFG). The computations were made possible through access to the resources of the North-German Supercomputing Alliance (Norddeutscher Verbund zur Förderung des Hoch-und Höchstleistungsrechnens—HLRN).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Sommerwerk, K., Michels, B., Haupt, M.C. et al. Influence of engine modeling on structural sizing and approach aerodynamics of a circulation controlled wing. CEAS Aeronaut J 9, 219–233 (2018). https://doi.org/10.1007/s13272-018-0290-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13272-018-0290-7