
Abstract
A half wing model, a test rig and new wind tunnel walls were designed to study the vortex development at a lambda wing. The model has a sweep angle of 53° and a round leading edge. It is designed for pitching oscillations around a mean angle of attack of up to 20° up to a free stream Mach number of 0.7. Unsteady aerodynamic load data shall be delivered for aeroelastic simulations of Unmanned Combat Aerial Vehicles. Due to the highly nonlinear aerodynamic character, the design and sizing of the model had to take into account load cases with beginning and fully developed vortices. Furthermore, the different characters at subsonic and transonic speeds had to be included. Coupled simulations with a finite element model including the mounting and the connection to the actuation system were performed to assess the stability and the dynamic response of the model. Furthermore, the test concept and the process of the design of the model will be described.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Vortex development is a major steady and unsteady aerodynamic phenomenon for wings with medium to high sweep angles [1–3]. This results in high local loads which change significantly with the flight conditions of the aircraft. Furthermore, unsteady problems like wing rock or even buffet at various parts of the aircraft can occur. Depending mainly on the sweep angle, the airfoil nose radius and the Mach number, the vortices usually occur at higher angles of attack (α). This is connected to high loads and hereby high complexities for the model and test rig design. Dynamic wind tunnel experiments were mainly conducted at low Mach and Reynolds numbers [3, 4].
In the DLR (German Aerospace Center) project FaUSST (German for: Advanced Aerodynamic UCAV Stability and Control Technologies) a generic lambda wing configuration of an UCAV is used to study the stability of that kind of aircraft [5, 6]. Many modern UCAVs have a similar geometry and therefore similar problems. In contrast to the DLR-F17/SACCON [6] configuration, which is also part of this project, the main focus for the IWEX (German for: Unsteady Vortex Experiment) model is the vortex development at a purely round leading edge. Therefore, the geometry was designed especially eliminating the apex vortex and the influence of the tip vortex. The steady and unsteady tests shall deliver validation data for aeroelastic computations.
The test concept will be described including the model geometry, the peniche and the new test rig in combination with new wind tunnel walls. The main focus is on the procedure of the structural design concerning different relevant load cases and the analysis of coupled fluid and structure computations to ensure a safe conduction of the test.
2 Test concept
The model is designed for experiments in the Transonic Wind Tunnel Goettingen (DNW-TWG), performing pitching oscillations with up to 30 Hz at a mean α of up to 20° and up to a free stream Mach number of 0.7. Amplitudes of up to 1.5° are planned, depending on the excitation frequency and the free stream conditions. However, the focus is on lower amplitudes (≈0.2°). The half-wing model is attached to a hydraulic actuation system outside of the test section. The opening in the wall is sealed by a turnable disk (Figs. 1, 3). Hereby, a closed wind tunnel section and a continuous intersection of the wall and the model are achieved. This also facilitates the simulation and reduces the influence of gaps that otherwise exist. A peniche was designed to reduce the interferences between the wing and the wall.

Test section, test rig and model
2.1 Model geometry
The geometry was designed by adapting the DLR-F17 geometry. The leading edge sweep angle is also 53°. At the inner part, the trailing edge, however, has a sweep angle of −26.5° (Fig. 2). The half span of the model is 0.51 m. The twist varies linearly from 0° at the inner kink to −7.4° at the tip to reduce the tip vortex and shift the development of the main vortex inboard. The symmetric airfoil at the root has a maximum thickness to chord ratio of 14.5 % at 39 % of the chord length. There is an asymmetric airfoil with a maximum thickness ratio of 12 % at 42 % chord length for the main wing. At the outer triangular part of the wing, it blends into a symmetric airfoil at the tip. The leading edge radius to chord ratio is kept constant for the whole wing span of the model (r/l = 0.5 %).

IWEX model geometry
2.2 Peniche
The peniche was especially designed for angles of attack between 12° and 18° by the results of computational fluid dynamic (CFD) calculations. The shape and width were varied to minimize the differences compared to the geometry without wind tunnel walls. The effects on the flow originate from a horseshoe vortex at the leading edge and a corner separation at the trailing edge near the junction of the wall and the wing [7]. Without a peniche, this results mainly in a displacement of the main vortex in the direction of the tip which can lead to a change of the vortex topology by a merging of the tip and the main vortex [8].
The peniche has a span of 0.03 m, is divided into two parts and can be replaced. Thus, there is the possibility to use the model in other wind tunnels or with a peniche that is optimized for other measurement conditions, e.g., lower α.
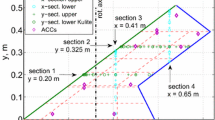
2.3 Test section, walls and disk
The cross section of the test section of the TWG is 1 × 1 m2. For the unsteady pressure sensitive paint (iPSP) and the planed particle image velocimetry (PIV) measurements, the optical access is improved by new wind tunnel walls with larger glass windows. On the side opposite to the model, there are two identical windows with a larger and one with a smaller height (Fig. 1). Their vertical sequence can be changed to improve the flexibility for the setup of the optical measurement systems. The concept was designed by the help of CAD software including possible camera view angles. Especially the high angles of attack, the sweep angle and the curvature of the airfoils had to be taken into account.
The turnable disk is connected to the actuation system at the back of a piezoelectric balance, which is located between the model and the actuation shaft. Therefore, it is possible to measure all three forces and three moments without the influence of the disk (Fig. 3). The radial distance between the disk and the wall was defined by the expected deformation of the mounting and the bearings.

Actuation system
3 Structural design and load calculations
The structure was designed using FE models that were computed with MSC.NASTRAN and CATIA V5. The loads for the design were generated by a superposition of inertial and aerodynamic loads. Subsonic and transonic cases had to be selected because they differ in their behavior regarding the vortex development and therefore their load distribution. Initially, Mach numbers were selected that clearly show either the one or the other character [8] to study this effect (Fig. 4), even though Mach 0.8 is not part of the planned measurement envelope.

Subsonic and transonic pressure coefficient (c p) distribution, α 14°, reference geometry
The goal of the design was a model which is as rigid as possible. So, no structural response was desired. The stability and dynamic response of the model was studied by coupled fluid/structure computations to ensure that vibrations are always damped. Thus, the structural deformation should mainly contain the frequency of the excitation. Otherwise, inertia loads exist due to deformations, which differ significantly from those of the approximation of the superposition of static forces that were used for the design.
Flutter calculations were performed, using ZAERO, to generally assess the aeroelastic stability of the model for linear flow conditions occurring at lower angles of attack. There was almost no change of the eigenfrequencies with increasing dynamic pressure. On one hand, the frequencies are well separated. On the other hand, with increasing order of the modes, they become very high due to the stiffness of the model. Hence, only the first 10 modes can be expected to be critical at all. Only the third bending mode showed a tendency to become unstable, but for dynamic pressures far above that of the test. The reason might be that for highly swept wings or plates, this mode is similar to a combination of a torsional and a bending mode.
3.1 Structural design
The structure was basically designed in two stages. First, the feasibility of a model with eigenfrequencies that are well above the test frequencies was checked. After defining the dimensions for the connection to the balance and the actuation system, a FE model with shell elements (Fig. 5) was created with ModGen, a parametric generator for FE models with wing-like structures [9], invented at the DLR Institute of Aeroelasticity. The advantage of the parametric model description was the possibility to quickly vary geometrical, structural and material parameters. Hereby, the influence of the constraints and the connection to the actuation system, especially on the dynamic structural behavior, was studied. Furthermore, approximations of the necessary material thickness and suitable positions of ribs and spars were checked, first with simple load distributions then with loads from the CFD computations. It was concluded that there would be no benefit using fiber composite materials, also regarding achievable eigenfrequencies. Complex stress distributions occur due to the geometry of the model. This results in a design where the advantages of the high strength and stiffness in the fiber direction would not be exploited sufficiently. Especially at the rear part of the inner kink, this is easy to understand. Therefore, aluminum was selected.

Initial shell model, inner structure, not adapted to the final design
The disadvantages of the shell model compared to a model with solid elements become mainly important at higher modes. The experimental analysis of the real structure showed that the shell model, also after the spars and ribs were adapted to the final design, predicted slightly higher eigenfrequencies for the bending modes. Nevertheless, the modes are in good agreement regarding their shape and sequence. Taking into account that neither the screws nor their threads were included, this is a good result. The additional material at the leading and trailing edge for the connection of the upper and lower part (Fig. 7) was modeled by additional mass in this area of the shell model.
At the wing, the “natural” shear center of the airfoil section with two spars and a constant material thickness was expected to be at 40–45 %. The thickness of the rear spar was increased to minimize the wing torsion, originating from torsional moment and wash-out. Hereby, the elastic axis is shifted towards the trailing edge. This was also the driving factor for the design of the ribs and their position. Together with the spars, they create boxes, which increase the torsional stiffness and also the rigidity of the thin rear part of the outer kink. This part can be critical regarding stronger deformations. Additionally, the highest inertia forces, caused by the pitch oscillations, occur at the outer kink of the trailing edge.
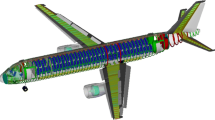
For the detailed design, FE models with solid elements were created (Fig. 6). The screws were represented by multi-point constraint (MPC) elements. In a later version, also the rotor of the actuation system, its bellow coupling, the shaft with the two bearing pairs and the balance were included as solid elements, spring elements and MPCs. Initially, they were only represented as beam elements. During the design process, the stiffness of the mounting and actuation was tuned to experimental results. Especially the bearings and the connection between the shaft and the coupling are not ideally stiff in reality. Therefore, static and dynamic tests of the actuation system and mounting were performed. This part of the FE model had the biggest uncertainties, especially since the inertia moment of the model was higher than that of the models that were usually tested with the actuation system. That is the consequence, as the model itself was designed as rigid as possible and for high loads and an effect of the high sweep angle. Therefore, the lowest eigenfrequencies and also the static deformations are very much affected by the deformation of the shaft. Small variations in its stiffness can have a huge impact on the eigenfrequencies and the dynamic behavior of the model.

Solid elements model and mode shape of 1st torsional mode
During the detailed design process, only a small additional spar had to be added near the rear part of the kink and the spars at the tip were removed (Fig. 5 vs. Fig. 7). Apart from that, the basic structural setup stayed as before.

Upper (left) and lower half of the model
The detailed sizing of the structure was mainly performed in the CATIA environment with a superposition of the quasi static inertia and aerodynamic forces. The aerodynamic loads were interpolated from the CFD results to a set of points for the force transmission. Essentially the same methods, which are based on radial basis functions [5, 12], were used as for the coupled calculations that will be discussed in the next section. Different sets of loads were selected to take the varying aerodynamic character into account. For the final sizing, they were deduced of computations at the free stream Mach numbers 0.5 and 0.7. Furthermore, they were all scaled to a maximum global normal force (Eq. 2). Finally, different load distributions, but with the same overall normal force were checked in the sizing process. Hereby, the global lift or normal force can be used as the main monitoring value for the wind tunnel test.
As the coupled dynamic simulations only deliver deformation, but no stress results, there were three approaches for this problem.
1. The displacement results of the coupled computations were interpolated to the surface of the FE model. However, this straightforward way leads to unrealistic stress peaks at some points, where the deformation constraints were imposed. This is caused by the interpolation between the two different grids. If it is not smooth, e.g., at corners, it results in small errors. As the stress is the derivative of the deformation over space, the differences are augmented. Nevertheless, those results could still be used for the analysis of the inner structure.
2. The aerodynamic loads f aero at times t i with maximal deformations were interpolated to the FE model and the maximal inertia loads due to the rotational acceleration were added. They are the amplitude of the pitch oscillation times its squared angular frequency ω (Eq. 1).
If the elastic motion is small compared to the rigid rotation and mainly contains the excitation frequency, the error of neglecting the inertia forces due to the elastic displacement can be expected to be small. This is of course only valid for stable conditions. The analysis of the dynamic deformations will be explained in the next section. Their results were compared to the subsequently described superposition.
3. For special cases, e.g., where the bending mode was excited, the local acceleration was derived from the deformation results. It was analyzed and the values at relevant instants of time used to generate NASTRAN load cards for the FE model. Then, the aerodynamic forces and the rotational acceleration were added to compute the stress results of the FE model.
3.2 Aerodynamic loads and coupled calculations
In the following section, mainly those results of the CFD computations will be discussed that were used to generate the design loads or check the steady and unsteady behavior of the model, i.e., the coupled calculations. Especially the spanwise distributed coefficients are good indicators for the variation of the load distribution. Furthermore, surface plots of the pressure difference between the upper and lower surface were used to illustrate the local loads. For this purpose, the results were interpolated with a barycentric approach to a structured grid with equal spanwise and chordwise positions on upper and lower side, to facilitate the analysis and the computation of sectional values.
3.2.1 Steady results
The typical vortex at the round leading edge of the F17 is described as thickness caused vortex [10] (Fig. 8) which is strongly affected by an interaction with the boundary layer. During the design process of the IWEX model, static and coupled dynamic simulations were performed using the CFD solver TAU to solve the RANS/URANS equations [11] and a modal representation of the FE models [5, 12]. For the final design loads, the wind tunnel walls were included. For the basic studies and the initial sizing, the geometry without wind tunnel walls was used. Below, this will be called reference geometry.

Pressure distribution and skin friction lines with incipient vortex development, α 15°, upper side
The steady behavior can be described by the variation of the load and moment distributions. With increasing α, the main vortex moves inboard and separates further apart from the surface. At the outer part of the wing, the slope of the normal force is already decreasing, whereas at the inner part it is still positive (Fig. 9). This results in a more triangular distribution. However, the force maintains nearly at a constant level at the outer part of the main wing.

Normal force coefficient distribution (c zf), α 14–20°, Ma 0.5, Re 2.65 Mil, reference geo
The moment distribution (Fig. 10) is also affected by the inboard moving vortex extending from the leading edge of the inner part over the trailing edge of the outer part (Fig. 8). Hereby, the moment distribution, especially at the outer part, changes significantly. For lower α, the slope of the distributed moment is positive which then becomes negative. The effect of the decreasing lift at the leading edge is augmented by the increased suction at the trailing edge.

Moment coefficient distribution (at 50 % chord) cmy50, α 14–20°, Ma 0.5, Re 2.65 Mil, reference geo
Combining both effects, the center of pressure x cp moves further to the trailing edge (Fig. 11). On one hand, this amplifies the strong washout effect (Fig. 12) caused by the high sweep angle. On the other hand, it will shift the vortex outboard again as the local α is reduced. Under coupled dynamic conditions this could cause a highly nonlinear behavior.

Center of pressure (x (cp)) over local chord (l), α 14–20°, Ma 0.5, Re 2.65 Mil, reference geo

Steady, deformation only of the wing, /m
Further computations, also at Ma = 0.5, but a higher Reynolds number, showed that the effect on the center of pressure is reduced by an increase of the suction peak at the leading edge. This postpones the detachment of the vortex and reduces the effect of the suction of the vortex at the rear part of the outer wing on the spanwise distributed values. However, the local effects still exist in the same manner. These computations were already performed including the wind tunnel walls and the peniche. The dynamic pressure was the same as for the computations at Ma = 0.7 to obtain similar deformations.
With increasing transonic effects the vortex development changes. Shocks trigger the vortex to separate from the surface and change their direction due to the reduced velocity perpendicular to the shock front. Furthermore, the vortex-shock interaction shifts the development of the vortex to lower α, compared to the subsonic cases (Fig. 4). This results in a decreasing normal force slope and hereby aerodynamic load (Fig. 13). Beyond an α of 16° at Ma = 0.7, the strong vortex lift is reduced and the lift slope becomes negative.

Normal force and moment coefficient distribution, α 12–18°, Ma 0.7, Re 2.65 Mil, model geo
This effect is very sensitive and strongly affected by the position of the shock and the separation of the vortex from the surface [8]. Depending, e.g., on the turbulence model, a shock position can easily vary by some percent of the chord length already for flow without vortices at a lower α. To exclude the uncertainty of the computations regarding the extent of the transonic behavior and at which α the vortex moves inboard, all loads for the sizing process were scaled to a maximum lift force as reached for the subsonic cases. This maximum global normal force F z,max is:
The steady coupled calculations generally showed a good and fast convergence behavior. So, no obvious static stability problem exists. From the lift and moment curves, and the pressure distributions, it was determined that relevant cases for the stability examinations are at the angles of attack of 14.5° and 16.5°. The first one is slightly below the detachment of the vortex and the second one is thereafter.
4 Unsteady calculations
The coupled unsteady calculations, that will be discussed, consisted of the following combinations:
Unsteady aerodynamic calculations can be started based on an undeformed shape or on the flight-shape of the coupled computations with steady aerodynamics. This yields for steady or oscillating pitch angle. To increase the convergence speed, coupled unsteady simulations usually are started based on coupled steady results. Theoretically, if the aerodynamic loads have a damping character, calculations starting from the “jig”—or the “flight”—shape should yield the same results after some time. If the calculations with a constant α and unsteady aerodynamic computation do not converge, a stability problem or a limit cycle oscillation might exist. Vice versa, the non-equilibrium state of the jig-shape can be used to trigger and/or check if a stability problem can occur and study the dynamic response of the model. It acts in the same way as a step input. Furthermore, the modes mainly responsible for the static deformation are inherently excited by this. This was especially important due to the mounting of the model which has a high impact on the lower eigenfrequencies and whose stiffness is difficult to model due to the connection and the bearings. The tests also included pitch amplitudes of 1°, starting from jig- and flight-shape, to examine the nonlinear aerodynamic response, occurring at higher amplitudes, and produce higher inertial effects. Amplitudes of 0.2° with frequencies 5–30 Hz were used to study the general unsteady behavior of the vortex system.
The wavy characteristics of the lift and moment coefficient of the first three periods in Figs. 14 and 15 are caused by the strong influence of the bending motion of the wing. This was excited by starting the computation based on the undeformed shape. So, even small dynamic deformations can have an impact on the global results. This yields for both, numeric and experimental tests. Vice versa, the aerodynamic response can be significantly different for coupled and for uncoupled computations if special structural modes are triggered. Furthermore, it was noticed that the bending mode is damped over time.

Global lift (C L) and moment coefficient (C My) over phase angle of motion Φ, Ma 0.5, α 14.5 ± 1°, 20 Hz, Period 1–6

C L, C My over α, Ma 0.5, α 14.5 ± 1°, 20 Hz
A restart after the third period is shown in Fig. 14, based now on the deformed geometry from the coupled computations with static aerodynamics (FE model + RANS). Even though the rotational motion is about 10 times higher than the bending motion, a significant discrepancy exists between the case with an active bending motion and where the deformations are small and mainly with the frequency of the excitation.
The frequency variations at a mean α of 14.5°, where the vortex development begins, show that the influence of the high sweep angle and hereby the strong plunge-like motion of the outer part of the wing affects the vortex at the tip differently than the main one (Fig. 16). The normal force slope of the “quasi-steady” load becomes negative. Hence, at the outer part it decreases in phase with the angle of attack, but increases in phase with the plunge velocity.

First harmonic frequency response of normal force and moment, α 14.5 ± 0.2°, 20 Hz, Ma 0.5
A phase shift exists (Fig. 17) between the main vortex and the tip vortex developing at the outer triangle of the wing (Fig. 8). Additionally, it is fed by a narrow co-rotating vortex along the leading edge. The figure represents the unsteady pressure coefficient, i.e., the transfer function of cp over α at the excitation frequency. A negative real part means increasing suction in phase with α. So, the main vortex is in phase with the angle of attack, but shows a strong phase lag. Hence, both vortices could induce vibrations similar to a seesaw. However, the eigenfrequencies, that can be excited hereby, are much higher. In the simulations, this system of vortices seemed to be stable and the behavior was not changing significantly after the second or third simulated period of motion.

First harmonic frequency response to pitching motion (H = c p/α) of pressure coefficient c p, real and imaginary part, α 14.5 ± 0.2°, 20 Hz, Ma 0.5
The coupled dynamic simulations showed a damping of the structural vibration after an initial excitation, arising from the start, based on an undeformed geometry. In Fig. 18, the heave and twist deformation of the first three periods is plotted over the wing span. This is the same case as shown in Figs. 14 and 15.

Spanwise heave and twist (Δα) over time, Ma 0.5, α 14.5 ± 1°, 20 Hz period 1–3
In the last step it had to be ensured that the dominant part of the deformation is caused by the pitch excitation. It was analyzed by a fast Fourier transformations (FFT) (Fig. 19) and if deemed necessary, again over time, of the spanwise heave and twist distribution. This is essential for the quasi-steady simplification of design loads as a superposition of aerodynamic loads and the rotational acceleration. The FFTs of the spanwise force and moment coefficients give an indication how the deformation affects the aerodynamic loads or vice versa, similar to Fig. 19. For these tests it was decided not to display the forces as generalized forces as the actual value is lost.

FFT of heave and twist, along the wing span, α 14.5 ± 0.2°, 20 Hz, Ma 0.5
As the deformations were small, their behavior damped by the aerodynamic response and the dominant part with the frequency of the pitch excitation, the described superposition was a fair simplification for the design loads.
5 Conclusion
In this article, the design of the test rig, the wind tunnel model and the experimental concept were described. The methods and the process of the design were explained. The following criteria were important for the concept: A good optical access to the measurement section should be achieved by new wind tunnel walls. Wall interference effects had to be reduced. The model had to be designed for high loads with small deformations.
The structure of the model was designed in two steps. First, a simpler shell FE model was created by a parametric model generator to find a suitable structural setup. For the detailed design, a model consisting of solid elements was used. Important load cases were selected based on the analysis of CFD calculations and scaled as design loads. The differences between subsonic and transonic loads were taken into account. A superposition of the inertial loads that are caused by the pitch oscillation and steady aerodynamic loads was used for the design and sizing. For special cases, also the inertia forces of the dynamic deformation of the model were included. They were deduced from coupled computations.
Steady and unsteady coupled fluid/structure computations were performed for the analysis of the stability and dynamic response of the model. They were compared to the superposition of the forces. The important load cases were at mean angles of attack slightly below and above the angle of attack where the vortex separates from the surface. The dynamic response of the model was triggered by starting the computations based on an undeformed structure. The deformations were damped by the aerodynamic response. The same approach was used in combination with pitch oscillations of amplitudes of 1°. Hereby, the aerodynamic nonlinearities caused by the amplitude of the oscillations were included. The structural response was attenuated over time. Hence, the superposition of the loads was a fair simplification.
Especially, the CFD computations including the wind tunnel walls and in a later phase also the deformation of the model were important to find a concept for a new test rig, wind tunnel walls and plan the experiment. The comparison to the reference geometry without the wind tunnel was used to study aerodynamic influences of the walls. The scaling of the loads reduced the uncertainties that are related to the sensitivity to transonic effects. It ensured that the global normal force can be used as a safe monitoring parameter.
First experiments were conducted successfully. Results for tests at steady angles of attack were published in [13]. The model exhibited no critical structural response and showed low deformations. In the future, computations will be compared to the results of the experiments. The signals of the piezoelectric balance as well as the unsteady pressure and acceleration sensors can therefore be used. Additionally, the optical measurements deliver surface and flow field information (PIV, iPSP and optical deformation measurement system). Hereby, an increased understanding of the vortex development at round leading edges and its motion induced aerodynamic response is achieved. Furthermore, the current simulation capabilities can be evaluated. The hereby gained experiences will be used for the design and analysis of real scale configurations.
References
Livne, E. Future of airplane aeroelasticity (2003) J Aircraft 40(6): 1066–1092
Hartwich, P.M., Dobbs, S.K., Arslan, A.E., Kim, S.C.: Navier–Stokes computations of limit-cycle oscillations for a B-1 like configuration. J Aircraft 38(2), 239–247 (2001). doi:10.2514/2.2781
Gursul, I., Gordnier, R., Visbal, M.: Unsteady aerodynamics of nonslender delta wings. Prog Aerosp Sci 41, 515–557 (2005). doi:10.1016/j.paerosci.2005.09.002
Hummel, D., Loeser, T.: Low speed wind tunnel experiments on a delta wing oscillating in pitch. 21st Congress of the International Council of the Aeronautical Sciences, 98-3.9.3. 21. ICAS Congress, Melbourne (1998)
Voss, G., Cumnuantip, S., Neumann, J.: A steady aeroelastic analysis of an unmanned combat aircraft. Vehicle Conceptual Design, 29th AIAA Applied Aerodynamics Conference, Honolulu, Hawaii, AIAA 2011-3020 (2011), doi: 10.2514/6.2011-3020
Vicroy, D.D., Loeser, T.D., Schütte, A.: SACCON dynamic wind tunnel tests at DNW-NWB and 14′×22′ NASA LaRC, Chicago, IL, AIAA Paper 2010-4394, 2010, doi:10.2514/6.2010-4394
Gand, F., Deck, S., Brunet, V., Sagaut, P.: Flow dynamics past a simplified wing body junction. Phys Fluids 22, 115111 (2010). doi:10.1063/1.3500697
Wiggen, S., Voß, G.: Vortical flow prediction for the design of a wind tunnel experiment with a pitching Lambda wing, CEAS Aeronautic J. doi:10.1007/s13272-014-0120-5
Klimmek, T.: Parameterization of topology and geometry for the multidisciplinary optimization of wing structures, In: Proceedings European Air and Space Conference, Manchester (2009)
Konrath, R., Roosenboom, E., Schröder, A., Pallek, D., Otter, D.: Static and dynamic SACCON PIV Tests—Part II: Aft Flow Field”, Chicago, IL, AIAA Paper 2010-4396 (2010), doi:10.2514/6.2010-4396
Gerhold, T., Friedrich, O., Evans, J.: Calculations of complex three-dimensional configurations employing the DLR-TAU-Code, AIAA 97-0167, Reno. Nevada (1997). doi:10.2514/6.1997-167
Neumann J.: PyCSM—python computational fluid dynamics and computational structure mechanics coupling system. Software Documentation and Technical Report, Institute of Aeroelasticity, Goettingen (2010)
Wiggen, S.: Experimental results for vortex dominated flow at a Lambda-wing with a round leading edge in steady flow, AIAA SciTech, National Harbor, AIAA 2014-0050 (2014), doi:10.2514/6.2014-0050
Author information
Authors and Affiliations
Corresponding author
Additional information
This paper is based on a presentation at the CEAS Air and Space Conference 2013, September 16–19, Linköping, Sweden.
Rights and permissions
About this article

Cite this article
Wiggen, S., Voß, G. Development of a wind tunnel experiment for vortex dominated flow at a pitching Lambda wing. CEAS Aeronaut J 5, 477–486 (2014). https://doi.org/10.1007/s13272-014-0121-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13272-014-0121-4