
Abstract
Large integration of renewable energy in hybrid power system in isolated mode of operation make frequency control a challenging task. This paper investigates the performance of Cuckoo Search Algorithm (CSA) and Firefly Algorithm (FA) based frequency control strategy of such a hybrid power system, which is a unique work. The generating units of the system are plug in hybrid vehicle (PHEV), wind turbine generators, a diesel engine generator (DEG) and battery energy storage system (BESS). The proportional plus integral (PI)/proportional integral derivative (PID) controllers are employed with PHEV, DEG and BESS to adjust the total active power generation in accordance to the load demand. Addition of PHEV reduces the reliance on the DEG or BESS as a result of variability and uncertainty of wind power. Different disturbance conditions such as step perturbations, random variations of load as well as wind output power, have been considered in the case studies under Matlab simulation to assess the performance of CSA and FA based control strategy. Analysis indicates that CSA based PID controller provides better response compare to GA, PSO and FA based PI/PID controller and CSA based PI controller. Sensitivity analysis has been carried out to check the robustness of FA and CSA optimized PI/PID controller gains.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Recent concerns over the uncertainty of fossil fuels and effects of global warming have led to enhancement of power generation using renewable energy sources (Owusu and Samuel 2016). Nevertheless, power generation from the renewable sources are fluctuating in nature, which significantly affects the power quality (Luo et al. 2015). Several works reported to have investigated the frequency control issue, which is one of the major concerns to renewable based power system. Lee and Li (2008), studied wind generator, PV, fuel cell, diesel generator and battery and other energy storage device based hybrid system. Uncertainty of wind and solar power increases the dependence on diesel generator and/or the battery energy storage system. Hybrid Electric vehicle (PHEV) which is eco-friendly, has been considered for mitigating the frequency fluctuation caused by the renewable energy in hybrid power system (Sadati et al. 2017). PHEV in such a hybrid power system, will reduce the reliance on diesel generator or the battery storage system and preserve the environment at the same time. Frequency control approach of hybrid power system in absence of battery energy storage has been explored by (Sekhar and Mishra 2016). Proposed hybrid power system comprises of diesel driven generator, solar PV, fuel cell. The output power of solar PV is controlled in accordance with diesel driven generator and fuel cell unit so as to maintain the active power generation and load demand using neurofuzzy control strategy. Results were encouraging. Nevertheless, dynamic performance of the microgrid could be studied with practically variable kind of generation and/or load demand. Fixed gain PI controllers for the generating units have used by (Senjyu et al. 2005; Nayeripour et al. 2011). However, PI controllers with fixed gains may not perform well at varying operating conditions. Simultaneous optimisation of the controllers’ parameters may provide better performance.
Choice of appropriate optimization tools for tuning the controller parameters plays a key role in dynamic performance of the hybrid power system. Fuzzy PI controller (Taghizadeh et al. 2015), Fuzzy based PID controller (Bisht 2014), PSO based fuzzy controller (Bevrani et al. 2012), PSO based fractional order controller (Pan and Das 2015), GA and PSO optimized PI/PID controllers (Das et al. 2014a, b) have achieved encouraging results in respect to restriction of frequency deviation in hybrid power systems. Use of recently developed metaheuristic algorithms for optimizing the parameters of the controllers could provide better performance in terms of lesser frequency excursions.
FA and CSA are the two recently developed meta heuristic algorithms (Saikia and Sahu 2013; Gandomi et al. 2013). It has been reported that FA is capable of outperforming over GA, PSO in terms of convergence rate in finding the global optimum (Yang 2009).
Present work investigates the dynamic performance of WTG-DEG-PHEV-BESS hybrid power system. PI/PID controllers, employed with DEG, PHEV and BESS are tuned simultaneously for coordinated control using FA and CSA algorithms. The main objectives of this paper are:
1. To compare the performance of CSA optimized controllers vis-à-vis FA optimized counterparts on the hybrid system for mitigating system frequency in the event of variations in load, generation or both.
2. To compare the performance of CSA and FA optimized controllers with GA, PSO optimized counterparts on the hybrid system for mitigating system frequency.
3. To analyses the performance of the hybrid system model using CSA and FA optimized controllers against randomly variable wind power generation and load demand.
4. To carry out sensitivity analysis to examine the robustness of the PI/PID controller’s gains optimized at nominal conditions to ± 20% load changes from its nominal value as well as change in wind power.
The rest of the article is prepared as follows: Sect. 2 describes the hybrid power system’s components and its modeling. The proposed hybrid system’s frequency control strategy is described in Sect. 3. The overview of FA and CSA algorithms are presented in Sect. 4. Dynamic responses of the proposed control technique under different circumstances are described in Sect. 5. Section 6 concludes the report briefly.
2 Description of hybrid power systems and its modeling
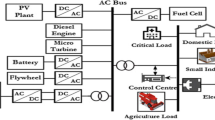
The proposed structural analysis of the hybrid ac power system is depicted in Fig. 1. It comprises of power generation units such as wind turbine generator (WTG), diesel engine generator (DEG), plug-in hybrid electric vehicle (PHEV) and battery energy storage system (BESS). Modeling of the systems’ units and their first order transfer function with specific gain and time constant are deliberated in the succeeding sections.

Schematic diagram of the proposed hybrid power system
2.1 Wind turbine generator (WTG)
Wind energy is considered one of the most matured renewable energy technologies available. It has been developed rapidly with an average growth of 21% during the past decades. The worlds wind capacity at the end of 2013 has achieved 318.105 GW (Cheng and Zhu 2014). But the major drawback of wind system is that wind velocity is not consistent in direction and magnitude and also not uniform from top to bottom of a large rotor. Hence wind profile is necessary to exploit wind energy. This variable nature of wind energy will upset power quality and in the worst cage damage the system if appropriate control mechanism is not incorporated (Bansal and Bhatti 2008).
In this work transfer function model (Lee and Li 2008) of the wind turbine generator (WTG) is considered:
where KWTG and TWTG are the gain and time constant of wind turbine generator.
2.2 Diesel engine generator (DEG)
Diesel generator set in the hybrid power system is considered as a backup unit. A synchronous generator is connected to the diesel engine to provide electrical power output. Prime mover of the diesel engine adjusts the fuel input in response to load changes. In this paper for hybrid power generating system, first order transfer function modal (Lee and Li 2008.) of diesel engine generator is expressed by
where KDEG and TDEG are the gain and time constant of DEG.
2.3 Plug-in hybrid electric vehicle (PHEV)
Plug in hybrid electric vehicle is such kind of vehicle which can be powered by conventional fuel as well as electric power stored in battery. It’s battery can be charged by plugging it into an outside power source or by regenerative breaking also. Since it can be run by both fuel and electricity, they are good option for driving long distance.
The transfer function of PHEV represented by 1st order by (Ali et al. 2014)
where TPHEV is the time constant of PHEV.
2.4 Battery energy storage system (BESS)
Applications of batteries in a short time power fluctuated wind based hybrid energy system have been pervasive choice. Their excellent desired technical quality (expeditious response) can mitigate the frequency fluctuations effectively. There are several literatures that deal with this issue (Das et al. 2012). The corresponding transfer function model (Yang 2008; Das et al. 2012) of BESS is represented as
where KBESS and TBESS are the gain and time constant of BESS.
2.5 Power and system frequency deviation
In order to maintain the standard of power supply to the customer one of the most important need is to retain the supply frequency within acceptable range. In wind based isolated hybrid power system, limiting frequency at desired level is a tough job. An appropriate control strategy is adopted with the diesel engine generator, battery energy storage system, plug in hybrid electric vehicle to adjust the power output. As frequency variation occurs mainly due to active power mismatch; the main aim is to keep balance of the active power generation and demand (Das et al. 2011). The mismatch between the power generation (PTOTAL) and load demand reference (PL) is given by
where PTOTAL and PL are total (active power) generation and load demand respectively (Hussain et al. 2016). Frequency deviation Δf is calculated by the following expression (Senjyu et al. 2005):
where Ksys is the system frequency characteristics constant (Das et al. 2011). In practical scenario, there exists an intrinsic time delay between in the power deviation and system frequency fluctuation. Thus, the transfer function model of power system for system frequency fluctuation to per unit active power deviation is expressed by (Das et al. 2011)
where Tsys, M and D are the constants related to system time, system inertia and damping respectively. In this paper, M = 0.012 and D = 0.2 has been considered.
2.6 Problem formulation
To diminish the distinction between the active power generation and load; a coordinated control strategy has been developed incorporating PI and PID controllers with the generating systems except for wind energy system. Parameters of the controllers are optimized using CSA as well as FA. The Integral Square Error (ISE) of frequency deviation is considered as the objective function (JISE) (Hussain et al. 2016). The detail objective function (JISE) and problem constraints has discussed in sequence.
JISE is minimized subject to
The parameters of the PI/PID controllers’ i.e., Kp and Ki or Kp, Ki and Kd optimized by minimizing JISE. The maximum and minimum values of Kp, Ki and Kd for each of the controllers are taken in the range of [0, 300]. The transfer functions of the PI/PID controllers employed with the DEG, PHEV and BESS respectively, are given by the following equations:
where \(K_{pPHEV} ,K_{pDEG} ,K_{pBESS}\) are the proportional gains of the PI and PID controllers employed with PHEV, DEG and BESS respectively. \(K_{iPHEV} ,K_{iDEG} ,K_{iBESS}\) are the corresponding integral gains of these controllers and \(K_{dPHEV} ,K_{dDEG} ,K_{dBESS}\) are the derivative gains of the corresponding controllers.
3 Proposed frequency control strategy
A coordinated frequency control strategy (FCS) with DEG, PHEV and BESS energy storage systems has been developed employing PI/PID controllers for providing optimal frequency control of the proposed hybrid system. The FCS is a centralized decision making process in the hybrid power system that coordinates in between the total active power generation (PTOTAL) and load demand (PL). Usually, when generation is more than load demand, a positive change in frequency (ΔF) occurs and the reverse case happens when load exceeds the generation. Uncertainties in wind power and variations in the load demand lead to power oscillations which are leveled by coordinated control actions of the controllers. The gain values of the controllers fitted with DEG as well as PHEV and BESS are optimized using soft computing tools such as FA and CSA.
Though WTG is intermittent in nature condition, the maximum capacity conventional energy based generator (DEG) should capable to match the load demand. The steps for frequency control of the proposed framework are illustrated in Fig. 2.

Flowchart explaining the frequency control approaches of the proposed framework
When PWTG < PL; DEG and PHEV and BESS get activated and controlling the system frequency without curtailing the load demand (PL).
When PWTG > PL; DEG is off and PHEV and BESS will be charged.
4 Overview of FA and CSA optimization technique
Firefly Algorithm was formulated by Yang in 2007 (Yang 2009; Saikia and Sahu 2013) mimicking the flashing characteristics of fireflies. Recently, it has been reported that the FA outperforms the GA in terms of efficiency in finding the global optimum and success rate (Saikia and Sahu 2013). The algorithm was developed with the assumptions that:
-
1.
All fireflies are unisex so that one firefly will be attracted to other fireflies irrespective of their sex.
-
2.
Attractiveness is proportional to the brightness, thus for any two flashing fireflies, the less bright one will move towards the brighter one. Attractiveness decreases with increase in distance between them. If there is no brighter one than a particular firefly, it will move randomly.
-
3.
The brightness of a firefly is determined by the landscape of the objective function. For a maximization problem, the brightness can simply be proportional to the value of the objective function (Gandomi et al. 2013; Yang 2009).
The distance between any two fireflies i and j at Xi and Xj can be the Cartesian distance rij = Xi − Xj. In the simplest form, the light intensity I(r) varies with the distance monotonically and exponentially (Saikia and Sahu 2013).
where I, I0 and γ are the light intensity, the original light intensity, and the absorption coefficient. As a firefly’s attractiveness is proportional to the light intensity seen by adjacent fireflies, we can now define the attractiveness as (Yang 2009):
The exponent γr can be replaced by other functions such as γrm when m > 0 (Saikia and Sahu 2013). For more details and pseudo code of FA authors may refer to (Gandomi et al. 2013).
Cuckoo search is another metaheuristic optimization technique proposed by Yang and Deb (2009). It is primarily based on the natural obligate brood parasitic behavior of some cuckoo species in combination with the levy flight behavior of some birds and fruit flies.
Cuckoo search is based on the three idealized rules:
-
1.
Each cuckoo lays one egg at a time, and dumps its egg in a randomly chosen nest;
-
2.
The best nests with high quality of eggs will carry over to the next generation;
-
3.
The number of available hosts nests is fixed, and the probability that the egg laid by a cuckoo is discovered by the host bird is Paϵ (0, 1). The host bird can abandon the nest and build a new nest in another location or throw the egg away.
Each egg in the nest represents a solution and the cuckoo egg represents a new solution (Yang and Deb 2009). Arbitrariness plays a key role in heuristic algorithm for exploring the fits solutions randomly in a search area. Arbitrariness is procured through arbitrary walk, where for cuckoo search algorithm the effective arbitrary walk approach is achieved by Levy flight using Eq. (20). Although the step length of the Levy flight is more, so it can maximize the efficiency of the searching resources under different uncertainty conditions.
where xj(t + 1) is the current position of Levy flight, xj(t) is the probability of transition, μ represent the escalating factor whereas l tells about step size (Kaushik et al. 2017; Jain and Chaudhari 2017). For detailed study and pseudo code authors are referred to (Yang and Deb 2009). System parameters and tuned parameters of FA and CSA are presented in Tables 1 and 2 respectively.
5 Results and discussions
Figure 1 shows the schematic diagram of the proposed hybrid power system. In the hybrid system, total power (PTOTAL) is given by
Since power output from wind energy system is alternating in nature, net power generation is fluctuating. The mismatch in generation and its consumption causes system frequency fluctuation. To maintain a balance condition the output power of DEG, BESS and PHEV are adjusted with the help of controllers. Following three cases, as presented Table 3 has been carried out to investigate the impacts of output variation of wind generator.
5.1 Step wind power and constant load condition: case 1
The performance of the hybrid power system model under the influence of step perturbations to wind power with constant load is analyzed. Figure 3 represents the operating conditions with constant load demand; 100% (1 p.u) of the nominal value and wind power output of 0.3 p.u during 0–60 s and at 60 s 10% wind power generated suddenly increased. As the wind generator output is insufficient in meeting the load requirement; the auxiliary sources DEG, BESS and PHEV cater the remaining load demand. The frequency deviation as a result of power mismatch due to sudden wind power variation is mitigated by the coordinated control action of PI/PID controllers employed with the generating units. The performance of the CSA and FA optimised controllers are compared in terms of ffrequency deviation (ΔF) as shown in Fig. 4. The output power plots of different generating units such as DEG, BESS and PHEV are shown Fig. 5. Figure 6 presents the objective function curve of CSA and FA optimized controllers on this model. Frequency deviation and fitness function plot reveal that the CSA optimized controllers performed better than their FA optimized counterparts.

Wind power variation (PWTG) and load power (PL), case 1

Frequency deviation, case 1

Output power generation of a PDEG, b PPHEV and c PBESS, case 1

Objective function versus iterations: a for PI controller based model and b for PID controller based model, case 1
Although literature pointed out that the performance of the CSA and FA are better than the GA and PSO (Yang 2009), the same has been established this work also. A comparative analysis has been conducted considering GA, PSO and FA optimized PI/PID controllers for the same operating condition mention in case 1. It is worth mentioned here, the GA and PSO are run with equal population size and equal numbers of generations/iterations as that of CSA and FA. As such, the performance of the PI/PID optimized with GA, PSO, FA and CSA are compared and presented in Fig. 7. Results indicate that the hybrid power system with CSA optimized PID controller outperforms the model with the controllers optimized using other algorithms. Therefore, GA and PSO have not been considered for other case studies.

Comparison of frequency deviation using GA, PSO, FA and CSA optimized PI/PID controller, case 1
5.2 Step wind power &variable step load condition: case 2
In this case, during the first 60 s wind power is kept in .3 p.u and load demand is constant (1 p.u) during 0–0 s, after 60 s wind power generated suddenly decreased by 10% and load is varied. At t = 40 s 20% decreased in load occurs and at t = 60 s step change in load power is kept in 1.2 p.u as presented in Fig. 8. Under this changed condition wind generator is insufficient to meet the load requirement; therefore, DEG, BESS and PHEV supply the remaining load demand. During 40–60 s load is decreased by 20%, hence DEG, BESS and PHEV start supplying less power. However, for the last 40 s load power is increased by 20% of the nominal value and hence DEG, BESS and PHEV start supplying more power as shown in Fig. 9. In this situation study, controllers installed with the hybrid system regulate the power output of the generating units’ viz., DEG, BESS, and PHEV so as to minimize the system frequency fluctuation. The CSA and FA optimized parameters of the controllers are shown respectively in Tables 4 and 5. The performance of the controllers in terms of frequency excursion can be compared as shown in Fig. 10. Figure 11 presents the convergence plots of objective function versus iterations on this hybrid system model for PI and PID controllers. The appreciable enhancement of CSA optimized PID controller over CSA optimized PI and FA optimized PI/PID controllers for the dynamic frequency responses in terms of maximum overshoot, undershoot as shown in Figs. 4 and 9 are presented in Table 6. In view of the fact that the responses of PI controller are oscillating in nature, the comparative study in term of settling time has not been presented. However, the performance index (JISE) improvement under considered case studies in terms of ISE has presented in Table 7.

Wind power variation (PWTG) and load demand (PL), case 2

Output power generation of a DEG, b PHEV and c BESS, case 2

Frequency deviation, case 2

Objective function versus iterations: a for PI controller based model and b for PID controller based model, case 2
5.3 Randomly variable WTG and load demand: case 3
In this case, the dynamic performance of the proposed system against randomly variable wind power generation and load demand is considered. As it can be seen that during the entire time periods, the wind and load demand power vary around the average values of 0.3, and 0.5 p.u respectively. Figure 12 shows wind turbine generator power (PWTG) and load demand (PL) under such operating conditions. To smooth out the power fluctuations due such uncertainty conditions, the power generated by DEG, PHEV, and BESS are controlled in coordination such that active power balance is maintained. The gains of the controllers obtained under this study by using FA as well as CSA are presented in Table 5. Since the response of the PI controllers’ are oscillating in nature, the comparative study in term of convergence plot as well as frequency deviation has not been considered. Frequency response of FA based PID controller is compared with the CSA based PID controller as shown in Fig. 13.

Wind power variation (PWTG) and load demand (PL) case 3

Frequency deviation, case 3
However, the output power of DEG, PHEV, BESS are presented in Fig. 14a–c. The comparison of performance index value vs iterations for the model using FA optimized PID controller against CSA optimized PID controller are presented in Fig. 15. The output of the objective function in Fig. 15 and the frequency deviation responses result shown in Tables 6 and 7 clearly reveal that CSA optimized PID controller performed better than FA optimized counterpart.

Output power generation of a DEG, b PHEV and c BESS, case 3

Objective function versus iterations for CSA and FA based PID controller, case 3
5.4 Sensitivity analysis
Sensitivity analysis (Saltelli 2008; Pannell 1997 and Das et al. 2014a, b) is carried out to examine the fact that the parameters optimized in one operating condition also work well under different uncertainty condition. In this case, performance of the CSA and FA optimized controllers as obtained in case 1 are compared with their counterparts obtained in case 2 operating conditions, where the parameters value of controllers for case 1 is used in case 2. The comparative performance of frequency deviation curve of case 2 is compared for sensitivity analysis of the system shown in Figs. 16, 17, 18 and 19. It is found that both almost follow each other, which reveals that parameters of base case are quite robust and can be used for any variation in load and PWTG.

Comperative performance of CSA optimized PID controller for case 1 versus case 2 in terms of frequency deviation

Comperative performance of FA optimized PID controllers for case 1 versus case 2 in terms if frequency deciation

Comperative performane of FA optimized PI controllers for case 1 versus case 2 in terms of frequency variation

Comperative performane of CSA optimized PI controllers for case 1 versus case 2 in terms of frequency variation
6 Conclusion
This work broadly investigates the dynamic performance of WTG-DEG-PHEV-BESS hybrid system in isolated mode of operation. Application of CSA and FA based control strategy for frequency control in this hybrid system model is a unique work. Gains values of the controllers are optimized simultaneously considering uncertainties such as step perturbations and random variations of load as well as wind output power. Three different case studies and sensitivity analysis have been conducted to yield the information in respect to better control strategy for such an isolated hybrid system. Comparative performance of the control strategy using GA, PSO, FA and CSA indicate that PSO perform better than the GA; while FA performs better than PSO and CSA is the best among all optimization tools considered here. Among the controllers PID performs better than the PI controllers in terms of settling time, overshoot and oscillations. Simulation results also indicate that despite change in load and output power from wind generator; the coordinated control of DEG, PHEV, BESS can provide better performance in terms of minimum frequency excursions. Finally, it can be concluded that control strategy employing CSA optimized PID controllers is an effective means for automatic frequency control of isolated hybrid power system.
References
Ali R, Mohamed TH, Qudaih YS, Mitani Y (2014) A new load frequency control approach in an isolated small power systems using coefficient diagram method. Int J Electr Power Energy Syst 56:110–116
Bansal RC, Bhatti TS (2008) Small signal analysis of isolated hybrid power systems: reactive power and frequency control analysis. Narosa Publishing House, New Delhi
Bevrani H, Habibi F, Babahajyani P, Watanabe M, Mitani Y (2012) Intelligent frequency control in an AC microgrid: online PSO-based fuzzy tuning approach. IEEE Trans Smart Grid 3(4):1935–1944
Bisht MS (2014) Fuzzy based intelligent frequency control strategy in standalone hybrid ac microgrid. In: Proceeding IEEE conference, control applications (CCA), pp 873–878
Cheng M, Zhu Y (2014) The state of the art of wind energy conversion systems and technologies: a review. Energy Convers Manag 88:332–347
Das DC, Roy AK, Sinha N (2011) Genetic algorithm based PI controller for frequency control of an autonomous hybrid generation system. In: Proceedings international multiconference of engineers and computer scientists
Das DC, Roy AK, Sinha N (2012) GA based frequency controller for solar thermal–diesel–wind hybrid energy generation/energy storage system. Int J Electr Power Energy Syst 43(1):262–279
Das DC, Sinha N, Roy AK (2014a) Automatic generation control of an organic rankine cycle solar–thermal/wind–diesel hybrid energy system. Energy Technol 2(8):721–731
Das DC, Sinha N, Roy AK (2014b) Small signal stability analysis of dish-Stirling solar thermal based autonomous hybrid energy system. Int J Electr Power Energy Syst 63:485–498
Gandomi AH, Yang XS, Talatahari S, Alavi AH (2013) Firefly algorithm with chaos. Commun Nonlinear Sci Numer Simul Elsevier 18(1):89–98
Hussain I, Ranjan S, Das DC, Sinha N (2016) Frequency control of an isolated hybrid power system using particle swarm optimization PID controller. Pak J Biotechnol 13:72–76
Jain A, Chaudhari NS (2017) A novel cuckoo search strategy for automated cryptanalysis: a case study on the reduced complex knapsack cryptosystem. Int J Syst Assur Eng Manag. https://doi.org/10.1007/s13198-017-0690-9
Kaushik A, Verma S, Singh HJ, Chhabra G (2017) Software cost optimization integrating fuzzy system and COA-Cuckoo optimization algorithm. Int J Syst Assur Eng Manag 8(2):1461–1471
Lee D-J, Li W (2008) Small-signal stability analysis of an autonomous hybrid renewable energy power generation/energy storage system part I: time domain simulations. IEEE Trans Energy Convers 23(1):311–320
Luo X, Wang J, Dooner M, Clarke J (2015) Overview of current development in electrical energy storage technologies and the application potential in power system operation. Appl Energy 137:511–536
Nayeripour M, Mohammad H, Taher N (2011) Frequency deviation control by coordination control of FC and double-layer capacitor in an autonomous hybrid renewable energy power generation system. Renew Energy 36(6):1741–1746
Owusu AP, Samuel A-S (2016) A review of renewable energy sources, sustainability issues and climate change mitigation. Cogent Eng 3(1):1167990
Pan I, Das SS (2015) Fractional order fuzzy control of hybrid power system with renewable generation using chaotic PSO. ISA Trans 62:19–29
Pannell DJ (1997) Sensitivity analysis of normative economic models, theoretical framework and practical strategies. Agric Econ 16:139–152
Sadati SMB, Moshtagh J, Shafie-khah M, Catalão JPS (2017) Risk-based bi-level model for simultaneous profit maximization of a smart distribution company and electric vehicle parking lot owner. Energies 10(11):1714
Saikia LC, Sahu SK (2013) Automatic generation control of a combined cycle gas turbine plant with classical controllers using Firefly Algorithm. Int J Electr Power Energy Syst 53:27–33
Saltelli A (2008) Sensitivity analysis for importance assessment. Risk Anal 22(3):1–12
Sekhar PC, Mishra S (2016) Storage free smart energy management for frequency control in a diesel-PV-fuel cell-based hybrid AC microgrid. IEEE Trans Neural Netw Learn Syst 27(8):1657–1671
Senjyu T, Nakaji T, Uezato K, Funabashi T (2005) A hybrid power system using alternative energy facilities in isolated island. IEEE Trans Energy Convers 20(2):406–414
Taghizadeh M, Hoseintabar M, Fiaz J (2015) Frequency control of isolated WT/PV/SOFC/UC network with new control strategy for improving SOFC dynamic response. Int Trans Electr Energy Syst 25(9):1748–1770
Yang XS (2008) Nature-inspired meta-heuristic algorithms. Luniver Press, Beckington
Yang XS (2009) Firefly algorithm for multimodal optimization, stochastic algorithms foundations and applications. In: Lecture notes in computer sciences, vol 5792, pp 169–178
Yang X-S, Deb S (2009) Cuckoo search via Lévy flights. In: Proceedings of world congress on nature & biologically inspired computing (NaBIC 2009), pp 210–214, IEEE
Acknowledgements
Authors thank NIT Silchar for giving the necessary supports to carry out this work.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Latif, A., Pramanik, A., Das, D.C. et al. Plug in hybrid vehicle-wind-diesel autonomous hybrid power system: frequency control using FA and CSA optimized controller. Int J Syst Assur Eng Manag 9, 1147–1158 (2018). https://doi.org/10.1007/s13198-018-0721-1
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13198-018-0721-1