
Abstract
This paper presents a model and experimental verification for a complete scenario of a proposed wide area measurement system (WAMS) based on synchronized phasor measurement units (PMUs). The proposed system is feasible for hybrid smart ac/dc power networks; such as grid-connected PV-power plants. The purpose is to increase the overall system reliability for all power stages via significant dependence on WAMS as distributed intelligence agents with improved monitoring, protection, and control capabilities of the power networks. The developed system is simulated in the Matlab/Simulink environment. The system was tested under two different cases; normal operation and fault state. Furthermore, the proposed WAMS was experimentally validated with results obtained from a reduced scale setup which built and tested in the laboratory based on the Hardware-in-the-loop concept. It was verified that the power system status can be easily monitored and controlled in real time by using the measured bus data in real time. This improves the overall system reliability and avoids cascaded blackout during fault occurrence. The simulation and experimental results confirm the validity of the proposed WAMS technology for smart grid applications.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
WAMS became one of the most recent technologies that are quite popular for upgrading the traditional electric grid. This upgrade has become a necessity to modernize the electricity delivery system following the occurrence of major blackouts in power systems around the world. Although many algorithms were developed in the past for online monitoring of transmission systems and distribution systems including the estimation of operating frequency, the required level of details for real-time online assessment is yet to be achieved [1–3]. In the early 1980s, synchronized phasor measurement units (PMUs) were first introduced and since have become the ultimate data acquisition technology, which will be used in wide area measurement systems with many applications currently under development around the world [4].
Synchronized phasor measurements, or synchrophasors, provide a method for comparing the phase and sequence values from anywhere on a power system which can be integrated with phasor data concentrators (PDCs) at substations in a hierarchical structure [5, 6].
The precise and accurate data that can be acquired from PMUs in a WAMS built on the power system confirms the need for a robust, reliable communication network with secure and high speed capabilities for online data access. As smart grid applications, utility power grid analysts can benefit from WAMS in the validation of system models and components which has been one of the first uses of synchrophasors. This validation occurs through the use of inter-area communication or simultaneous data collection of conditions at a single point in time [7].
In addition, real-time system monitoring (RTSM) for stability assessment and state measurement is another application where phasor measurements at nodes help the system operators to gain a dynamic view of the power system and initiate the necessary measures at the proper time. This is done in accordance with the latest IEEE standard (C37.118-2005) developed to standardize data transmission format and sampling rates of PMUs. This can significantly be supported by the stability assessment algorithms, which are designed to take advantage of the phasor measurement information [8].
In the past, post-event analysis was an application of synchrophasors (PMUs) without wide-area communication where data was archived locally. However, it was not a useful tool for online (dynamic) control. Recently, real-time control (RTC) of WAMS became a powerful control and analysis tool which provides a new view of power systems [9]. This is achieved by improving the communication network capabilities while maintaining PMUs as a main component in the network. The use of PMUs for RTC will increase the control accuracy since the data are measured online. Also, it will enhance the power system stability and delivery automation capabilities after challenges of new data communication requirements across the system are firstly resolved [10–12]. The depth of observability is another advantage for PMUs. It means that the ability of measuring the bus voltage phasor directly or calculating it using the PMU voltage and line current of the nearest connected bus. This is the cost effective part since it reduces the number of data acquisition instruments and tools needed across the network as the measuring line currents can extend the voltage measurements to buses where no PMU is installed. In Fig. 1, a simple generalization of the PMU block diagram is shown. This serves as the basis of simulating such unit [13, 14].

The block diagram of PMU
In this paper, the proposed WAMS network was studied and discussed to utilize this type of data collection to check the health state of hybrid power system networks. This is achieved through building WAMS infrastructure communication network. The performance of the overall proposed system is investigated through a Matlab simulation of the PMUs in a small system scenario of a WAMS network based on a 6-bus power utility network along with the associated communication network. Such a system is shown in Fig. 2. Moreover, the proposed WAMS power network was experimentally built in the laboratory in order to dynamically interact (online) with the PMUs readings. The PMU functions were programmed in the Matlab/Simulink environment based on the Hardware-in-The loop (HIL) concept.

Single-line diagram of the proposed hybrid ac/dc network
2 System description
The principle of a WAMS network based on synchrophasors data with the aid of a broadband communication network is described in this section. The system consists mainly of two layers as shown in Fig. 3. First, the electrical power system layer, which consists of line-line 208 V generating station with 50-kW output rated power, a PV-power renewable source of 24-kW rated power, 3-power transformers (T1, T2, and T3) linking the different parts of the electrical system, 2-short transmission lines (T.L.1 and T.L.2), 6-buses (B1-B6), 4-circuit breakers (CB1, CB2, CB3, and CB4) and 2-loads each of 30-kW. Secondly, the WAMS layer which consists of 3-PMUs, located at generation and load buses, and one phasor data concentrator (1-PDC) which collects the data received from the remote PMUs. The PDC performs protocol conversion from IEEE C37.118 to a number of common power system protocols suitable for analysis and control actions in the control center.

Schematic diagram of the proposed WAMS involving the PV sustainable power plant
3 System modeling
A small size WAMS platform was designed and built on a 208-V, 60-Hz test-bed network that was modeled as shown in Fig. 4. This proposed communication network was implemented in the lab by locating one PMU at each generation or load bus. All PMUs will send their measured voltage and current measurements to the PDC to monitor the system status and take the proper control action if required. Furthermore, the depth of observability can be utilized here to significantly reduce the system costs through the reduction of the number of PMUs. This is, since one PMU can read the voltage and current measurements at its bus location with other bus measurements, located in same area, can be calculated. However, this algorithm has less accuracy than installing one PMU at each bus. A simulation of the PMU units was done with using the sampling clock pulses to achieve synchronization between the synchrophasors which are phase locked to the signal provided by the global positioning system (GPS) receiver built inside or outside the PMU. The GPS module is simulated as a clock enabling pulses sent to all PMUs at the same time so that all of them will have the same time tags. Accordingly, the same reference wave can be used at all different PMU locations through the WAMS.

Simulink model for a scenario of the proposed PMUs communication network layer on a hybrid ac/dc power system smart grid
3.1 PMU network analysis
The PMU must separate the fundamental frequency component from other harmonics and find its phasor representation. The Discrete Fourier transform (DFT) method is then applied on the sampled input signal to compute its phasor. Also, it should compensate for the phase delay introduced to the signal by the antialiasing filters present in the input to the PMU. For x k {k=0,1,…,N} where N is the number of samples taken over one period, the phasor representation is given by:
Since the components for the real input signals at a given frequency appears in DFT and are complex conjugates of each other, they can be combined giving the factor of 2 in front of the summation in (1). The rms value of the fundamental frequency is obtained by dividing the peak value by \(\sqrt{2}\). In steady state, all generators have the same frequency (f ss Hz). Accordingly, the voltage at all points in the power system will have the same frequency f ss , which is measured by the PMU through to the following equation:
In case of frequency disturbance, the power system generators will run at different frequencies and each generator may be considered as a voltage source with different values of E i , f ss and δ i as slow time varying functions. It can be assumed that for a small time interval (△t=n cycles) the E i , f ss and δ i are constants. As a result, the power system can be represented as a circuit with several voltage sources of different frequencies. The actual voltage at any bus i using superposition becomes as follows [15]:
Where V i,j represents the voltage at bus i due to generator j. This indicates that this bus will have a multi frequency voltage that is close to 60-Hz. In dynamic power system studies, this can be estimated as:
In (4), the frequency \(f^{est}_{i}\) represents the frequency of the system at this location. It equals the frequency measured by the PMU at that bus. This is done by assuming that \({v}^{est}_{i}(t)=v^{act}_{i}\) and having access to the sampled data of \(v^{act}_{i}\); so \({f}^{est}_{i}\) can be easily evaluated [16].
3.2 Communication channel analysis
The IEEE PC37.118 16 protocol format is usually used in PMUs communication. This standard format includes the frequency and the rate of change of frequency in each message. Once the frequency and size of the messages are known, the following equation can be used to determine the bit-per-second (bps) rate at which the data can be sent [17]:
Where nn is the message size (bytes), L is the frame length (1 start bit, 8 data bits, 2 stop bits, 1 parity = 12), f is the messages frequency, 1.2 is a factor to account for system delays (based on typical experience). The PMU data can be sent at various rates, depending on the application requirements. Most PMUs have Ethernet cards that use the IEEE PC37.118 16 protocol for data exchange on the physical layer. The physical layer of the Ethernet can be unshielded twisted pair (UTP) or fiber optical network that support data speeds up to 100 Mbit/s in each data stream. The communications link connecting the substations could be a fiber-optic multiplexer. The relays communicate with the multiplexer via EIA-232 asynchronous interface.
3.3 The communication system constraints
Communication networks suitable for smart grid applications—even in a loose sense—need to provide distinct qualities and services which are closely related to application requirements and distinguish them from other networks [18]:
-
(1)
High reliability and availability are standard requirements for nearly every communication system. Nodes should be reachable under all circumstances. While this is normally not a problem in a wired network, it may be challenging for wireless or power line infrastructures because communication channels can change during operation. In the particular case of power line systems, such a change may be introduced by distribution network management which balances the power consumption load on the power grid, particularly on the medium-voltage (MV) level. Switching actions are initiated via various supervisory control and data acquisition (SCADA) and controlling systems (or even manually) using specific communication protocols that may not be modified.
-
(2)
High coverage and distances. Evidently, the nodes to be connected by the communication network are distributed in a wide area. Network concepts based on telecommunication systems or power lines have the potential to fulfill this requirement.
-
(3)
Large number of communication nodes. If we assume that only one energy meter per customer is connected, a primary station can supply up to tens of thousands of nodes, particularly in areas of large apartment block concentration. Even though the commands and data packets are usually short, total data volume to be transferred in the network is substantial, and communication overheads can become an issue.
-
(4)
Appropriate communication delay and system responsiveness. The Quality-of-Service (QoS) needs to take care of different data classes such as metering, control, or alarm data. Even if the predominant communication relationship is client/server (i.e., an application server polls the meter data or issues control commands), it may be necessary to foresee something like a fast event channel to transmit.
-
(5)
Communication security. Data related to smart grid applications are considered critical, in particular, when they are relevant for billing purposes or grid control. Secure communication is therefore important. Surveys among utilities showed that integrity (no malicious modification) and authenticity (origin and access rights are guaranteed) are the most important security goals for energy transmission and distribution networks, whereas the confidentiality aspect is not considered to be an issue.
-
(6)
Ease of deployment and maintenance. For any distributed communication system, mechanisms must be foreseen which facilitate not only the initial installation but particularly the maintenance of the infrastructure during the operation. Features like error mode analysis and error localization, easy update of firm- and software and remote configuration are essential.
4 Simulation and experimental results
A Matlab Simulink model was constructed to investigate the performance of the proposed WAMS for smart grid applications. The model was carried out according to the operation described in Sect. 2. The simulation parameters are shown in Table 1. Furthermore, a reduced scale experimental setup of 6-kW (4:1 scale) programmable power supply was utilized as a PV-characteristics emulator connected to AC-grid network. The setup was designed and implemented in the laboratory to verify the obtained simulation results. The experimental verification is based on HIL concept utilizing real-time DSP controller. The dSPACE1104 R&D TMS320F240 DSP controller board was used for interfacing the simulated PMUs with the hardware circuit to achieve fast real time response during the transient and steady state operations. An LEM (LA 25-NP) current and voltage (LV 25-P) transducers were used for measuring the actual power network bus-signals. The required measuring and interface circuits were designed and built. All the measurements from across the scaled model are time tagged using GPS synchronization clock. These measurements are then transmitted to the simulated PMUs that communicate with the setup. The measurements and the signals received from the power network communicating with the scaled model are transmitted to a local host through an Ethernet network. The interface software and the simulation algorithms are located on the host computer. This information is then used as inputs to the state estimator and estimates the state of the system considering all the imbalances, asymmetries, faults, and instrumentation errors. The results can then be compared with the actual measurements from the system.
In this section, the simulation and the experimental results of the proposed WAMS are given. The experimental ratings and parameters are listed in Table 2. Figure 5 shows the descriptive schematic diagram and the overall experimental setup for the proposed reduced scale HIL WAMS network. To estimate the PMUs characteristics, two types of tests were carried out. The first is a normal operation test without any fault or unbalanced conditions in the network. The second test is a fault test which was used as an extreme case to show the behavior of the network under this condition.


The HIL WAMS hardware implementation: (a) The schematic diagram, and (b) The experimental setup
4.1 Normal operation test
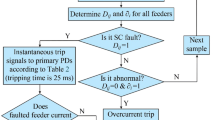
In this test, the system was observed under normal operation condition. The 30-kW load on bus 2 was supplied locally from the PV-power plant and the other 30-kW load on bus 3 was supplied by the generating station sharing the PV-energy. In this case, all the PMUs show stable readings within the references. From Figs. 6–11, the three PMUs read accurate information about line voltage v ab, the voltage amplitude of about 296-V starting from 0 sec for buses 1 and 2. At bus 3, zero voltage amplitude for the first 0.1 sec; since load bus was not connected to the network. After 0.1 sec, breaker 4(CB4) will connect load bus 3 to the network, the same average voltage amplitude level appears at other buses with a phase difference of 2.65 degrees under stable operation for all readings. The exported data by the simulated PMUs to the control center show that the developed WAMS succeeded to accurately reflect the system status in real-time (online). For a complete verification of its performance, another test with a fault occurrence is required.

PMU1 readings under normal operation condition (simulation)

PMU1 readings under normal operation condition (experimental): (a) The line voltage (100 V/div, 30 ms), and (b) The voltage amplitude (100 V/div, 30 ms) and phase difference (180 degree/div, 30 ms)

PMU2 readings under normal operation condition (simulation)

PMU2 readings under normal operation condition (experimental): (a) The line voltage (100 V/div, 30 ms), and (b) The voltage amplitude (100 V/div, 30 ms) and phase difference (180 degree/div, 30 ms)

PMU3 readings under normal operation condition (simulation)



Hybrid ac/dc power network during fault occurrence located at bus 2
4.2 Fault operation test
In this test, a three phase to ground short circuit fault occurred at bus 3 then was repeated for bus 2. Figures 12 and 13 show the single-line diagram for the hybrid ac/dc power network during fault occurrence at B3 and B2, respectively. Figures 14 and 15 show the readings for all PMUs at the 3-buses. The whole system shows normal operation for 0.2 sec while bus 3 was loaded after 0.1 sec. The fault has occurred after 0.2 sec and it is cleared after 0.05 sec later. PMUs 1 and 2 read larger phase differences (10.8 and 11 degrees, respectively) than in the normal mode (2.16 and 2.18 degrees, respectively). Accordingly, the voltage amplitude dropped by 40 V which means that the fault is not located on those buses area. On the other hand, PMU 3 has extremely large phase difference change (54 degrees) associated with a large drop in the voltage amplitude as a result of the fault that occurrence in this area. Consequently, the control center must send a control signal to the relay to release the circuit breaker at that bus upon receiving these data in real time from the PMUs to protect the other generation stations which are the most valuable part in the power network. Protecting against such damage prevents cascaded turnoff of stations which may result in major blackouts in the power system [19]. Furthermore, it helps analysts to determine the type of fault that has occurred using the data transmitted from PMUs.

PMUs readings during fault occurrence located at bus 3 (simulation)

PMUs readings during fault occurrence located at bus 3 (experimental): (a) PMU1, (b) PMU2, and (c) PMU3
Additionally, the fault test is repeated for bus 2 (PV-plant area) to confirm the validity of PMU readings in showing the behavior for the system health status. Figures 16 and 17 show the system response while the fault occurred at bus 2. We can notice that PMU2 observed the fault status at B2 while PMU1 and PMU3 indicate the fact that the fault is located inside the network but neither at B1 nor B3. This test can be utilized for studying the depth of observability for each PMU which will optimize the number of PMUs inside the WAMS network. Also, it leads to better economic operation and higher system reliability [20].

PMUs readings during fault occurrence located at bus 2 (simulation)

PMUs readings during fault occurrence located at bus 2 (experimental): (a) PMU1, (b) PMU2, and (c) PMU3
5 Conclusion
A performance analysis for a PMU based WAMS network was presented. The developed system was tested under two different possible conditions. The simulated PMUs show the real values of a maximum phase difference of 2.18 degrees and normal average amplitude reading showing the system stability. In this case, no action is to be taken from the control center during dynamic system monitoring.
During fault state, the PMUs data shows that the system has an unstable part with about 55 degrees phase difference. Additionally, a large voltage drop was observed in the area of the fault occurrence. This area was isolated via dynamic control signals before spreading to other parts resulting in catastrophic failure in some parts of the power system or blackouts. Furthermore, the fault test was repeated at different locations to study the behavior of each PMU. The Depth of observability was identified through different fault locations; one PMU can give the status indications for each area. PMU2 was able to observe B2 locally and give indication for fault located at B3.
Furthermore, a reduced scale HIL-based experimental verification system was test as an experimental verification in this paper. The real-time code for the PMU function was automatically generated using embedded target in dSpace and real time workshop facility (RTW) in the Matlab/simulink. All results obtained confirm the effectiveness of the developed WAMS network for smart grid applications.
References
Girgis, A., Ham, F.M.: A new FFT-based digital frequency relay for load shedding. IEEE Trans. Power Appar. Syst. PAS-101(2), 433–439 (1982)
Sachdev, M.S., Giray, M.M.: A least error squares technique for determining power system frequency. IEEE Trans. Power Appar. Syst. PAS-104(2), 437–443 (1985)
Paul, S., Basu, S.K., Hazra, U.S.: Novel frequency factor method for power system frequency measurement and estimation of load shedding. IEE Proc., Gener. Transm. Distrib. 134(6), 389–395 (1987)
Hrasnica, H., Haidine, A., Lehnert, R.: Broadband Powerline Communications Networks: Network Design. Wiley, New York (2004)
Metke, A.R., Ekl, R.L.: Security technology for smart grid networks. IEEE Trans. Smart Grid 1(1), 99–107 (2010)
Pipattanasomporn, M., Feroze, H., Rahman, S.: Multi-agent systems in a distributed smart grid: design and implementation. In: IEEE PES 2009 Power Systems Conference and Exposition (PSCE’09), Seattle, USA (2009)
Zhong, Z., Xu, C., Billian, B., Zhang, L., Tsai, S., Conners, R., Centeno, V., Liu, Y.: Power system frequency monitoring network (FNET) implementation. IEEE Trans. Power Syst. 20(4), 1914–1921 (2005)
Liu, X., Liu, G., Sherwood, M., Venkatasubramanian, V.: Wide-area monitoring and control algorithms for large power systems using synchrophasors. In: Bulk Power System Dynamics and Control, (iREP)—VIII (iREP) Symposium, Aug. 2010, pp. 1–5 (2010)
De La Ree, J., Centeno, V., Thorp, J.S., Phadke, A.G.: Synchronized phasor measurement applications in power systems. IEEE Trans. Smart Grid 1(1), 20–27 (2010)
Bose, A.: Smart transmission grid applications and their supporting infrastructure. IEEE Trans. Smart Grid 1(1), 11–19 (2010)
Zhang, Y., Bose, A.: Design of wide area damping controllers for interarea oscillations. IEEE Trans. Power Syst. 23(3), 1136–1143 (2008)
Phadke, A.G., Novosel, D., Horowitz, S.H.: Wide area measurement applications in functionally integrated power systems. Presented at the CIGRE B-5 Colloq., Madrid, Spain (2007)
Nuqui, R.F., Phadke, A.G.: Phasor measurement placement techniques for complete and incomplete observability. IEEE Trans. Power Deliv. 20(4), 2381–2388 (2005)
Xu, B., Yoon, Y.J., Abur, A.: Optimal placement and utilization of phasor measurements for state estimation. Presented at Power Sys. Comp. Conf., Belgium (2005)
Ning, J., Gao, W., Radman, G., Liu, J.: The application of the Groebner basis technique in power flow study. Presented in North American Power Symposium (NAPS), pp. 1–7 (2009)
Malpani, R., Abbas, Z., Swarup, K.S.: High precision frequency estimation using Internet-based phasor measurement unit. IEEE Trans. Power Syst. 25(2), 607–614 (2009)
Sood, V.K., Fischer, D., Eklund, M., Brown, T.: Developing a communication infrastructure for the smart grid. Presented in Elect. Power & Energy Conf. (EPEC), Montreal, pp. 1–7 (2009)
Sauter, T., Lobashov, M.: End-to-end communication architecture for smart grids. IEEE Trans. Ind. Electron. 58(4), 1218–1228 (2011)
Horowitz, S.H., Phadke, A.G.: Boosting immunity to blackouts. IEEE Power Energy Mag. 1(5), 47–53 (2003)
Amin, M.M., Moussa, H.B., Mohammed, O.A.: Development of a wide area measurement system for smart grid applications. This paper has been presented in the 18th World Congress of the International Federation of Automatic Control (IFAC) Invited Session, Milano, Italy, Aug. 28–Sep. 2, 2011
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Amin, M.M., Moussa, H.B. & Mohammed, O.A. Wide area measurement system for smart grid applications involving hybrid energy sources. Energy Syst 3, 3–21 (2012). https://doi.org/10.1007/s12667-011-0047-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12667-011-0047-4