
Abstract
This paper focuses on the impacts of contemporary geomorphological processes on fruition activities in a karst area of Salento (Apulia, southeastern Italy). The work illustrates the results of studies in a sinkhole field at Nociglia, in the Lecce province, recently recognized as a geosite and where shallow phreatic speleogenesis operates close to the water table level with the formation of karst caves, successive roof collapse, formation of wide caverns, and sinkhole development at the surface. All these features threaten the nearby infrastructures including a province road. Salento has a great number of active sinkholes related to natural and anthropogenic cavities. Their presence is at the origin of several problems in the built-up environment, due to increasing population growth and development pressures. In such a context, the detection of cavities, and the assessment of sinkhole hazards present numerous difficulties. To assess the potential danger from sinkholes, it is important to identify and monitor the main factors contributing to the formation process. A multi-disciplinary approach, comprising geological, geomorphological, and geophysical analyses, is necessary to obtain a comprehensive knowledge of these complex phenomena in karst areas. Geophysical methods can be of great help to monitor the processes and for identifying and mapping features related to the underground voids, by detecting contrasts in physical properties, such as density and electrical resistivity, with the surrounding sediments. At the same time, recognition of the presence of sinkholes by geophysical methods has to adapt to the local geological conditions and take advantage of the integration of the several methodologies available. The territory of Nociglia demonstrates that monitoring is essential for the safe exploitation of these type of geomorphosites.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Geosites are objects that have a scientific value for an improved understanding of the Earth’s history. They can be of historical, cultural, aesthetic, or socio-economic importance, and constitute a form of the landscape with peculiar and significant geomorphological attributes, which qualify them as components of the cultural patrimony of a territory. There is no standard dimension for geosites: some of them are punctual, whilst others might occupy wide areas (Wimbledon 1996; Wimbledon et al. 2000). Geosites of geomorphological interest are defined as “geomorphosites” (Panizza 2001). The geological heritage of the Apulia region (southern Italy) has recently been supported by the promulgation of Regional Law no. 33/2009 “Tutela e valorizzazione del patrimonio geologico e speleologico” (Safeguard and promotion of the geological and speleological heritage) which promotes the compilation of inventories of sites of geological interest (geosites), allocates economic support, and provides a number of measures for their exploitation and protection (Martimucci et al. 2012). These sites may constitute, in fact, the basis for building cultural attractions for tourists during the off-season periods (Margiotta and Sansò 2014; Sansò et al. 2015).
However, the management of geomorphosites at risk of collapse requires an adequate knowledge of the spatial extension of the sinkhole systems in order to mitigate the related risk. Sinkhole formation often causes public safety problems in karst environments (Ford and Williams 2007; Parise and Gunn 2007; De Waele et al. 2011; Parise 2012; Pepe et al. 2013; Gutierrez et al. 2014).
The Apulia region, due to the wide presence of soluble rocks, is actually well known for a long time due to the occurrence of sinkholes (Parise and Lollino 2011); therefore, the possibility of sinkhole formation is not unexpected for the area. However, since the beginning of this century, the frequency of events has had a definite increase, reaching a peak during 2009 and 2010. It has to be noted that, in any case, the documented events represent only a small part of what is actually occurring, since many others (likely, the majority) are not registered due to lack of information, or to rapid infilling of sinkholes by the landowners (Fiore and Parise 2013; Parise and Vennari 2013).
Identification of areas potentially prone to sinkhole hazards presents numerous difficulties, which force a multi-disciplinary approach, comprising geological, geomorphological, and geophysical analyses. To obtain high-resolution results, an important role is played by geophysical surveys. Geophysical methods are efficient for locating karst cavities (Beres et al. 2001; van Schoor 2002; Zhou et al. 2002; Leucci et al. 2004; Schrott and Sass 2008; Ezersky et al. 2009; Nuzzo et al. 2007; Margiotta et al. 2012). However, due to the availability of many techniques, and since each technique is typically used individually in a specific context, it is difficult to compare and integrate the results coming from different methodologies (Leucci et al. 2004; Kaufmann et al. 2011). Nevertheless, integrated methods are needed to obtain comprehensive knowledge of complex phenomena in karst areas. Geological and geomorphological analyses provide the basic data necessary to constitute a framework to understand the mechanism of sinkholes formation and to guide the choice of the most suitable geophysical techniques, as well as the interpretation of the measurements.
In this work, we focus on the ability to monitor karst phenomena, both in depth and spatially, through non-destructive and fast methods in an area (Nociglia, southern Salento) characterized by sinkholes and named in the Apulian Regional list of the sites of geological interest. Further, the site is part of a landscape of environmental importance resting in a regional park. Towards this aim, we illustrate the advantages of integrating geological and morphological surveys with surface geophysical techniques such as seismic reflection, geoelectric tomography, and ground penetrating radar methods for the identification of sinkhole-prone areas.
Geology and morphology
Salento is the terminal portion of Apulia, the heel of the Italian boot, and is an entirely karst land. It is characterized by diffuse karst morphologies, among which there are numerous collapse sinkholes, locally named “vore”, or “spunnulate” when they are in the proximity of the coastline (as for the origin of local karst terms, see Parise et al. 2003). Locally, sinkholes reach notable extension because of the coalescence of many individual features (Delle Rose and Parise 2002, 2010; Basso et al. 2013; Pepe and Parise 2014).
The geological setting of this region (Margiotta and Negri 2005; Giudici et al. 2012) comprises a Mesozoic carbonate sequence (hosting a deep aquifer) overlain by thin deposits of Paleogene, Neogene, and Quaternary age, which present a number of shallow water tables. The mid-southern part of Salento is marked by a wide endorheic area, bounded to the east and west by degraded fault scarps which are the flanks of two north-northwest—south-southeast narrow ridges.
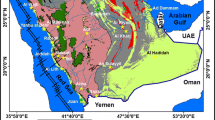
The study area, having an elevation of about 100 m a.s.l., lies at the border of one of the two elongated depressions characterizing the margins of this endorheic area. The geological map (Fig. 1) shows that the depression presents Lower Pleistocene calcareous sandstones (Gravina Calcarenite), Lower Pleistocene clays (Subapennine Clays, not outcropping but present in the subsoil), and Middle-Upper Pleistocene clayey sands (Terraced Deposits). Two main faults separate it from the Miocene fine calcarenites (Andrano Calcarenite) to the northeast and the pre-Neogene limestones (Altamura Limestone, off the geologic map in Fig. 1) to the southwest. The sinkholes are located in correspondence of the core of a north-northwest—south-southeast oriented syncline in the Lower Pleistocene formation. The Gravina Calcarenite consists of yellowish coarse-grained calcarenites, with abundant fossils and sandy or bio-limestone layers varying in thickness from a few to 15 cm. This unit unconformably overlies the carbonate Miocene bedrock. The thickness of the formation varies considerably, reaching a maximum of over 30 m.

Geological map of the Nociglia area (Salento, Apulia, southeastern Italy). The lower right inset shows location of the area. The lower left inset indicates the distribution of the caves discussed in the text
The poorly developed surficial hydrography is conditioned by tectonics. Both the endorheic drainage network (about 14 km wide) and the sinkholes have been markedly altered by anthropogenic activities since the end of 1800 with the construction of channels flowing into the sinkholes. In the 1970s the Fontanelle channel walls were cemented and at their end a settling tank was built (20 m × 10 m, depth 4 m; Fig. 2). Sinkhole formation has been responsible for the breaking out of the hydrographic network. This area was, as is the case for many other sectors of Salento, originally marshlands that were subject to reclamation works in the first half of the twentieth century. However, many swallow holes and active ponor remained at the sites, as testified by several documents and scientific articles (for instance, Anelli 1964).

Cemented channel walls leading to the tank built in the 1970s
The karst complex consists of five cavities, listed in Table 1, which also includes the main morphometric parameters of the caves, as well as the references to the register of natural caves in Apulia, managed by the Apulian Speleological Federation (Martimucci et al. 2012).
As a whole, the study area represents a sinkhole field (named Vore Spedicaturo), further complicated by the presence of a man-made channel that altered in some way the original groundwater circulation. Poor management of the area, in addition, in the recent past was at the origin of degradation episodes, with solid waste deposits dumped in the dolines (an unfortunately very common situation in the Apulian karst; Parise and Pascali 2003). From the south, the first cave encountered moving along the Fontanelle channel is Inghiottitoio Leptospira that begins exactly from the end of the channel. From this point, mostly narrow passages lead to the western side of the main sinkhole in the area, where, at the northern wall, the Vora Grande system starts. This is a clear collapse sinkhole, which originated as an opening in the ground of a few metres, despite its internal dimensions which are far more impressive (about 27 m in depth and a diameter of 20 m). It represents the longest cave in the area, reaching over 120 m of development. Continuing along the axis of the fold to the northwest, there is the sinkhole called Vora piccola, masked by thick vegetation and directly connected with the nearby Vora nuova (Fig. 3). A catastrophic subsidence event occurred on March 13, 1996, revealing the presence of this latter cave, about 19 m deep and 20 m wide. In the area there were already two large sinkholes from which it is possible to enter the Vore Spedicaturo karst system (Beccarisi et al. 1999; Selleri et al. 2003; Parise 2008, and references therein).

Vora Nuova, the sinkhole that opened on March 13, 1996. In the background, masked by vegetation, Vora Piccola is visible
Recently, Vora Grande was affected by a recovery project for its exploitation: the sinkhole is bounded by a dry stone wall and an overlying wooden fence (Fig. 4a). A path leads in proximity of its bottom (at about 20 m depth; Fig. 4b) where there is a platform that allows to have a general view of the sinkhole (Fig. 4c).

Exploitation works at Vora Grande: a entrance of the site exploited for tourists; b vegetated walls of the sinkhole, seen from within, showing the entrance to the cave in its lower part; c pathway leading to the bottom of the sinkhole
The dissolution phenomena are presently active as suggested by the recent development of a new, albeit minor, collapse sinkhole (Fig. 5). A significant drainage from shallow water tables to the deep aquifer is most likely to occur along sub-vertical planes of higher hydraulic conductivity due to faulting. The underground flow in the sinkhole system is conditioned by the rainfall regime: during intense rainfall events the water quickly reaches the most important sinkholes through the man-made channel and at the northeastern edge of the settling tank. The galleries forming the explored part of the system are filled by water during the major rainfall events, commonly in autumn and spring.

The most recent sinkhole, with opening about one metre-wide, located nearby Vora Grande: a picture taken few months after the opening, in 2007; b the situation today (the sign says “Warning! Imminent collapse risk”)
Geophysical methods
In the literature, an increasing interest in the use of geophysical methods for applications to karst environments has been observed, typically integrating different geophysical methods and techniques of data acquisition and processing (Auken et al. 2006; Kaufmann 2014; Samyn et al. 2014). A geophysical investigation was carried out in the study area to identify karst cavities and understand the karst system with the goal to provide useful information for management of geomorphosites at risk of collapse. Towards this aim, an adequate knowledge of the spatial extension of the underground cave systems was required in order to mitigate the risk to visitors.
All geophysical methods are potentially suitable to detect cavities, faults, aquifers, etc., provided that there are high contrasts of physical parameters between these features and the hosting rocks. However, the techniques are strongly influenced by the field conditions. In the Nociglia area quite difficult subsoil conditions are present, due to complex geology at the site, with the presence of tectonic features, karst landforms, and different lithotypes in peculiar hydrogeological conditions. We decided to carry out and compare three geophysical techniques: Electrical Resistivity Tomography (ERT), Ground Penetrating Radar (GPR) and Seismic Reflection (SR), this latter being the most expensive method. The choice of using different techniques was dictated by the difficulty in obtaining clear information on the subsoil from a single method, and the need to integrate the outcomes from the multiple techniques in order to get a more reliable model of the investigated site.
At Nociglia, conductive materials such as silty clay layers at the surface and/or in the first metres of depth, and locally soil cover are present. In this context, one of the most suitable methods is represented by the Electrical Resistivity Tomography. ERT allows a good depth of investigation in the presence of conductive materials. Furthermore, it has a good resolution and is a fast method.
The ERT method analyses the materials in the subsoil on the basis of their electrical behaviour and can provide two and even three-dimensional high-resolution electrical images of the subsurface (Reynolds 1997; Loke 2015). The ERT method uses numerous electrodes, with the distance between them depending upon the resolution and depth of the particular targets being sought. ERT surveys can be carried out using different electrode arrays (dipole–dipole, Wenner, Schlumberger). The electric current is injected into the ground, and the voltage signals are measured. From the configuration of the array, it is then possible to calculate the apparent electrical resistivity. We used for calculation of the true resistivity a least-square method with an enforced smoothness constraint, the RES2DINV software (Loke 2015). The inversion method constructs a model of the subsoil using rectangular cells and determines the resistivity value for each of them, minimizing the differences between the observed and the calculated apparent resistivity values (Loke 2015). Further, we used model cells with widths of half the distance between the units, thus reaching a resolution equal to 2.5 m. We also corrected the effect of the topography on the measurements, incorporating the topography into the inversion model. The RES2DINV program has three different methods that can be used to incorporate the topography into the inversion model. The three methods are similar in that they use a distorted finite-element mesh. In all these methods, the surface nodes of the mesh are shifted up or down so that they match the actual topography. In this case, the topography becomes part of the mesh and is automatically incorporated into the inversion model. The difference between these three methods is the way the subsurface nodes are shifted. The simplest approach, used by the first finite-element method, is to shift all the subsurface nodes by the same amount as the surface node along the same vertical mesh line. This is probably acceptable for cases with a small to moderate topographic variation, as in the present case study.
Ground penetrating radar (GPR; Jol 2009) performs very well in resistive environments, but suffers in the presence of conductive materials due to the absorption of the electromagnetic waves. Nevertheless, in favourable conditions it has also been used successfully in karst (Leucci et al. 2004; Nuzzo et al. 2007; Margiotta et al. 2012).
The GPR technique uses high frequency electromagnetic waves to explore the subsurface. A pulse of radar energy is generated on a dipole transmitting antenna that is placed on the ground. The resulting wave of electromagnetic energy propagates downward, where portions of it are reflected (or diffracted) back to the surface when a discontinuity in dielectric permittivity is encountered. Discontinuities are usually created by lithological passages, presence of cavity, faults, joints, etc.
The main limitation of the GPR method is due to the attenuation of the radar signal in the subsoil, which substantially reduces the depth of investigation. Absorptive attenuation losses of electromagnetic energy increase with the soil humidity and vary with the amount and types of salts present in the medium and in presence of conductive clay material. Under the very unfavourable condition of wet, clay-rich soils, the maximum depth of GPR penetration can be lower than one metre, and possibly limited to few tens of centimetres.
Another suitable method is seismic reflection, which is very sensitive to acoustical contrasts in either the mass density and/or the seismic velocity (Reynolds 1997). In many cases these contrasts occur at the boundaries among geological layers, and/or in presence of a cavity. The seismic reflection and GPR methods are similar in concept, but almost mutually exclusive in terms of where they work well, because one is based on acoustic wave propagation and the other on electromagnetic wave propagation.
Results of the survey
The geophysical surveys were performed in an area of a known sinkhole (Fig. 6). GPR was carried out near the southern margin of the sinkhole, whilst the ERT and seismic profiles were acquired approximately 3 m from its northern entrance. To evaluate the effectiveness of the GPR technique, some test-profiles (with different ranges of antennae and parameters) were performed, and after careful analysis of the data we decided to use 500 and 200 MHz antennas with a 70 ns wavelength and sample/scan 512 by means of a SIR 3000 GSSI. R1 and R2 profiles overlapped and their origin coincided; length was, respectively, 19 m for R1 and 14 m for R2. Figure 7 shows the section after processing (horizontal normalization at 0.2 m/scan), clearly indicating two strong signal reflections in its central part, due to the top (about 25 ns) of the sinkhole (labelled as S in the figure), highlighting its shape. Further reflections associated with fracturing of the rock mass can also be identified (L labels in Fig. 7). The electromagnetic (EM) wave velocity plays an important role in defining the depth of the object, in this case a sinkhole. An electromagnetic wave velocity can be estimated from GPR data in several ways (Jol 2009). We chose the quicker method to determine EM wave velocity from the reflection profiles acquired in continuous mode, using the characteristic hyperbolic shape of reflection from a point source (diffraction hyperbola). In our case the estimated velocity is 0.10 m/ns; therefore, the top of the sinkhole is at a depth of about 1.20 m. Furthermore, in the section relative to 500 MHz some reflected signals up to about 10 ns (approximately 0.5 m in depth) are clearly visible. These reflections are due to fractures (L labels in Fig. 7) of the rock mass and were identified thanks to the higher resolution of the 500 MHz antenna.

Location of the geophysical surveys

a Radar section relative to the R1 profile, acquired with the 500 MHz antenna: S Sinkhole, L fracturing of rock mass; b radar section relative to the R2 profile, acquired with the 200 MHz antenna: S Sinkhole, L fracturing of rock mass
Unfortunately, in other profiles near the zone of interest where there was the presence of clays and the electromagnetic signal was absorbed, the GPR results were not suitable to detect sinkholes. ERT measurements using both the Wenner and dipole–dipole arrays were performed to obtain information about the local stratigraphy and the karst features. The profiles were collected by means of an Iris Syscal R1. The dipole–dipole array is very sensitive to horizontal changes in resistivity values, and good for mapping vertical structures. The Wenner array is very sensitive to vertical changes in resistivity values and is suitable to map horizontal structures. Forty-eight electrodes were used at a 5 m inter-electrode distance (this value was chosen on the basis of the sinkhole size in the area). The subsoil model related to the dipole–dipole array measurements (Fig. 8) shows changes in resistivity in both the horizontal and vertical directions. Therefore, ERT is suitable to discriminate the stratigraphy and, in the central area, to detect two strong resistivity areas corresponding, respectively, to a known and an unknown sinkhole within the Gravina Calcarenite Formation. Interpretation of the model is associated with the following lithologies: (a) clay and sandy silts, (b) sands with calcarenite levels, (c) silts and silty sands, (d) calcareous sands. Moreover, it also highlights the presence of a likely fault (F).

Electrical resistivity tomography (ERT), using 48 electrodes at a 5 m inter-electrode distance and with the dipole–dipole array measurements. Key: a clay and sandy silts, b sands with calcarenite levels, c silts and silty sands, d calcareous sands, B, C cavity, F fault
The two seismic profiles (6 m overlap) were carried out partially covering the same area of the ERT (Fig. 6), by means of a Geometrics Strataview Seismograph (model Nimbus 1220) with 24 active channels, using 100 Hz vertical geophones at 3 m spacing and 23 shot points placed between the geophones. This geometry of acquisition allows processing by different CMP (Common Mid-Point). By using several CMP velocity analyses, the calculation of a one-dimensional velocity depth-distribution from CMP was obtained. The different models 1D were interpolated to obtain a 2D velocity model (Fig. 9). The qualitative model discriminates the stratigraphy between b (sands with calcarenite levels) and c–d (silts and silty sands, calcareous sands). The imperfect coincidence with the resistivity model is due to lack of data in the 2D CMP-velocity-analysis and to noise. There is, however, a good agreement with the presence of the sinkholes (C in Fig. 9), which indicates that the shallow seismic reflection is potentially suitable to detect these features.

2D seismic velocity model. Letters B and C indicate the cavities
Conclusions
Our research has underlined the importance of monitoring areas characterized by the presence of karst geosites in order to mitigate the risk for exploitation of the site. The relationship between human activities and geomorphological heritage should lead to further evaluation and protection strategies.
Geological and geomorphological analyses provided the basic data necessary to constitute a framework to understand the mechanism of sinkhole formation and, at the same time, to guide the choice of the most suitable geophysical techniques, and the interpretation of the measurements as well. Different geophysical methods (GPR, seismic, and ERT) were applied in order to point out their ability to locate the main karst conduits and caves. Even though it appears that all three methods can detect the cavities, GPR method appears as the most resolute, whilst the method producing the best compromise between resolution and investigation depth is the ERT that, even in presence of conductive materials, allows identification of the sinkhole features.
From the analyses of the outcomes of the geophysical surveys, it can be noted that the quicker methods are ERT and GPR. Both can be used to locate unknown sinkholes, and also for monitoring such features. In particular, ERT is suitable to identify unknown voids (possibly at the origin of sinkholes) when there is a conductive soil cover and the investigated depth (that is, a function of the array being used) is on the order of a few tens of metres. In addition, this method can well discriminate the stratigraphy and the presence of faults. On the other hand, GPR is more rapid and able to detect with high resolution the superficial part of the underground voids, highlighting in particular the fracturing degree in the rock mass, and the geometry and depth of the voids, but limited at best to a few metres from the ground surface.
As regards monitoring actions, a possibility might be to delimit the areas affected by sinkholes, creating a network of electrical sensors to perform continuous measurements in order to evaluate any lowering of the ground. As an alternative, repeated measurements over critical areas could be carried out on a monthly basis.
References
Anelli F (1964) Fenomeni paracarsici nei calcari grossolani terziari e quaternari delle Murge e del Salento in Puglia. Proc 3rd Int Congr Speleology, Wien, 2:199–206
Auken E, Pellerin L, Christensen NB, Sorensen K (2006) A survey of current trends in near-surface electrical and electromagnetic methods. Geophysics 71(5):G249–G260
Basso A, Bruno E, Parise M, Pepe M (2013) Morphometric analysis of sinkholes in a karst coastal area of southern Apulia (Italy). Environ Earth Sci 70(6):2545–2559
Beccarisi L, Chiriacò L, Delle Rose M (1999) Il sistema carsico vore-spedicaturo. Itinerari Speleologici 8:31–36
Beres M, Luetscher M, Olivier R (2001) Integration of ground-penetrating radar and microgravimetric methods to map shallow caves. J Appl Geophys 46:249–262
De Waele J, Gutiérrez F, Parise M, Plan L (2011) Geomorphology and natural hazards in karst areas: a review. Geomorphology 134(1–2):1–8
Delle Rose M, Parise M (2002) Karst subsidence in south-central Apulia Italy. Int J Speleol 31(1/4):181–199
Delle Rose M, Parise M (2010) Water management in the karst of Apulia, southern Italy. In: Bonacci O (ed), Proc Int Interdisciplinary Scientific Conf “Sustainability of the karst environment. Dinaric karst and other karst regions”, Plitvice Lakes (Croatia), 23–26 September 2009, IHP-UNESCO, Series on Groundwater no. 2, pp 33–40
Ezersky M, Legchenko A, Camerlynck C, Al-Zoubi A (2009) Identification of sinkhole development mechanism based on a combined geophysical study in Nahal Hever South area (Dead Sea coast of Israel). Environ Geol 58:1123–1141
Fiore A, Parise M (2013) Cronologia degli eventi di sprofondamento in Puglia, con particolare riferimento alle interazioni con l’ambiente antropizzato. Memorie Descrittive della Carta Geologica d’Italia 93:239–252
Ford DC, Williams P (2007) Karst hydrogeology and geomorphology. Wiley, Chichester
Giudici M, Margiotta S, Mazzone F, Negri S, Vassena C (2012) Modelling hydrostratigraphy and groundwater flow of a fractured and karst aquifer in a Mediterranean basin (Salento peninsula, southeastern Italy). Environ Earth Sci 67:1891–1907
Gutiérrez F, Parise M, De Waele J, Jourde H (2014) A review on natural and human-induced geohazards and impacts in karst. Earth-Sci Rev 138:61–88
Jol HM (2009) Ground penetrating radar theory and applications, 1st edn. Elsevier, Amsterdam
Kaufmann G (2014) Geophysical mapping of solution and collapse sinkholes. J Appl Geophys 111:271–278
Kaufmann G, Romanov D, Nielbock R (2011) Cave detection using multiple geophysical methods: unicorn cave, Harz Mountains, Germany. Geophysics 76(3):71–77
Leucci G, Margiotta S, Negri S (2004) Geological and geophysical investigations in karstic environment (Salice Salentino, Lecce, Italy). J Environ Eng Geophys 9:25–34
Loke MH (2015) Tutorial: 2-D and 3-D Electrical Imaging Surveys, PDF file at http://www.geotomosoft.com/coursenotes.zip. Accessed March 2015
Margiotta S, Negri S (2005) Geophysical and stratigraphical research into deep groundwater and intruding seawater in the Mediterranean area (the Salento peninsula, Italy). Nat Hazards Earth Syst Sci 5:127–136
Margiotta S, Sansò P (2014) The geological heritage of Otranto-Leuca coast (Salento, Italy). Geoheritage 6:305–316
Margiotta S, Negri S, Parise M, Valloni R (2012) Mapping the susceptibility to sinkholes in coastal areas, based on stratigraphy, geomorphology and geophysics. Nat Hazards 62(2):657–676
Martimucci V, Parise M, Antonicelli A, Antonucci MP, Carbonara M, Chieco M, Pace F (2012) The regional registers of natural and artificial caves of Apulia (southern Italy): recent developments from a joint project Regione Puglia—Federazione Speleologica Pugliese. Proc 7th Int Symp ProGEO on the conservation of the geological heritage “geoheritage: protecting and sharing”. Geologia dell’Ambiente 3:75–77
Nuzzo L, Leucci G, Negri S (2007) GPR, VES and refraction seismic surveys in the karstic area “Spedicaturo” near Nociglia (Lecce, Italy). Near Surf Geophys 5(1):67–76
Panizza M (2001) Geomorphosites: concepts, methods and examples of geomorphological survey. Chin Sci Bull 46:4–6
Parise M (2008) I sinkholes in Puglia. In: Nisio S (ed) I fenomeni naturali di sinkhole nelle aree di pianura italiane. Memorie Descrittive della Carta Geologica d’Italia 85: 309–334
Parise M (2012) A present risk from past activities: sinkhole occurrence above underground quarries. Carbonates Evaporites 27(2):109–118
Parise M, Gunn J (eds) (2007) Natural and anthropogenic hazards in karst areas: recognition, analysis and mitigation. Geol. Soc. London, sp. publ, London, p 279
Parise M, Lollino P (2011) A preliminary analysis of failure mechanisms in karst and man-made underground caves in Southern Italy. Geomorphology 134(1–2):132–143
Parise M, Pascali V (2003) Surface and subsurface environmental degradation in the karst of Apulia (southern Italy). Environ Geol 44:247–256
Parise M, Vennari C (2013) A chronological catalogue of sinkholes in Italy: the first step toward a real evaluation of the sinkhole hazard. In: Land L, Doctor DH, Stephenson B (eds), Proc 13th Multidisciplinary Conf on Sinkholes and the Engineering and Environmental Impacts of Karst, Carlsbad (New Mexico, USA), 6–10 May 2013, National Cave Karst Research Inst, pp 383–392
Parise M, Federico A, Delle Rose M, Sammarco M (2003) Karst terminology in Apulia (southern Italy). Acta Carsologica 32(2):65–82
Pepe M, Parise M (2014) Structural control on development of karst landscape in the Salento Peninsula (Apulia, SE Italy). Acta Carsologica 43(1):101–114
Pepe P, Pentimone N, Garziano G, Martimucci V, Parise M (2013) Lessons learned from occurrence of sinkholes related to man-made cavities in a town of southern Italy. In: Land L, Doctor DH, Stephenson B (eds) Proc 13th multidisciplinary conference on sinkholes, Carlsbad (New Mexico, USA), 6–10 May 2013, National Cave Karst Research Inst, pp 393–401
Reynolds JM (1997) An introduction to applied and environmental geophysics. Wiley, New York
Samyn K, Mathieu F, Bitri A, Nachbaur A, Closset L (2014) Integrated geophysical approach in assessing karst presence and sinkhole susceptibility along flood-protection dykes of the Loire River, Orléans, France. Eng Geol 183:170–184
Sansò P, Margiotta S, Mastronuzzi G, Vitale A (2015) The geological heritage of Salento Leccese area (Apulia, southern Italy). Geoheritage 7:85–101
Schrott L, Sass O (2008) Application of field geophysics in geomorphology: advances and limitations exemplified by case studies. Geomorphology 93:55–73
Selleri G, Salvati R, Sansò P (2003) Doline di crollo (cave-collapse sinkholes) in località “Spedicaturo”, Salento meridionale. Thalassia Salentina 26:175–181
van Schoor M (2002) Detection of sinkholes using 2D electrical resistivity imaging. J Appl Geophys 50:393–399
Wimbledon WAP (1996) Geosites: a new conservation initiative. Episodes 19:87–88
Wimbledon WAP, Ishchenko AA, Gerasimenko NP, Karis LO, Suominen V, Johansson CE, Freden C (2000) Geosites—an IUGS initiative: science supported by conservation. In: Barettino D, Wimbledon WAP, Gallego E (eds) Geological heritage: its conservation and management. Instituto Tecnologico Geominero de España, Madrid, pp 69–94
Zhou W, Beck BF, Adams AL (2002) Effective electrode array in mapping karst hazards in electrical resistivity tomography. Environ Geol 42:922–928
Author information
Authors and Affiliations
Corresponding author
Additional information
This article is a part of a Topical Collection in Environmental Earth Sciences on “Engineering Problems in Karst”; edited by Mario Parise.
Rights and permissions
About this article

Cite this article
Margiotta, S., Negri, S., Parise, M. et al. Karst geosites at risk of collapse: the sinkholes at Nociglia (Apulia, SE Italy). Environ Earth Sci 75, 8 (2016). https://doi.org/10.1007/s12665-015-4848-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12665-015-4848-y