
Abstract
The surface morphology of a rock joint is closely related to its mechanical properties. To reasonably characterize a rock surface, two new roughness parameters were proposed in this paper. One is related to the average slope angle of asperities that contribute to the shear strength, and the other reflects the frictional behavior of asperities that is defined as the maximum possible contact area in the shear direction. Taking the standard joint roughness coefficient profiles as example, these two roughness parameters can be applied to describe the directional characteristics of shear strength. Based on their relationships with initial dilation angles, the proposed roughness parameters were incorporated into a peak shear strength criterion. It is shown that the predicted peak shear strength is consistent with experimental data, and there is a power–law relationship. The application range of new roughness parameters was determined, which may facilitate a measurement process.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Prediction on the shear strength of rock joints is important for safety of rock structures, such as the slope stability, tunnel excavation, durability of dam foundations, and design of rock-socketed piles (Wang et al. 2001; Salari-Rad et al. 2013). It is helpful to a better understanding of the triggering mechanism of earthquakes that mainly occur between faults or plate boundaries due to the stick-slip frictional instability (Scholz 1998). Shear tests of rock joints in laboratory are usually performed with two methods (Olsson and Barton 2001). One is under a constant normal load with unconstrained normal displacement, and the other is under a constant normal stiffness with constrained normal displacement.
Shear strength of rock joints depends on the mechanical properties of an intact rock, normal stress, surface morphology, and shear direction. Of all these factors, roughness of surface morphology is closely related to the mechanical properties of rock joints. A number of statistical parameters have been proposed to characterize surface roughness, such as the average height (Z0), rms (Z1), the rms of its first derivative (Z2), average roughness angle (iave), structure function, and roughness profile indexes (Rp) (Liu et al. 2017). However, these parameters have limitation in establishing connection with the directionality of shear strength of rock joints. Especially, different morphologies might exhibit the same statistical parameters (Huang et al. 1992). Fractal has been applied to characterize the roughness of surface morphology (Xie et al. 1997). The fractal dimension D may perfectly describe the fine surface such as in the situation of smooth metal friction (Kang et al. 2005); however, it cannot be directly used in evaluating the mechanical properties of rock surfaces with a large-scale size of roughness (Yi et al. 2006). In addition, fractal dimension cannot reflect the directionality of shear strength of rock joints.
Patton (1966) firstly studied the influence of surface morphology on the shear strength of rock joints and obtained a bilinear criterion describing the shear strength of a plane surface with regularly spaced teeth. However, it failed to take into account the variation of peak dilation angles. Maksimović (1992) proposed a criterion to describe the relationship between the peak dilation angle and normal stress. Barton (1973) suggested an equation for estimating the dilation angle i = JRClog10(JCS/σn), where JRC (joint roughness coefficient) is a parameter that reflects the roughness of rock joints and JCS (joint compressive strength) is the compressive strength of a joint surface. When the joint surface is fresh, JCS is equal to the uniaxial compressive strength of intact rock. Ten standard JRC profiles have been proposed to estimate the roughness of a rock surface through visual comparison, which is subjective and mainly depends on the experience of investigators. Although some limitation remains, JRC was also suggested as a useful index for describing discontinuities. To obtain an objective and quantitative method, the relationship between the statistical parameters and JRC was investigated (Tse and Cruden 1979; Maerz et al. 1990; Lee et al. 1990). However, these approaches are ineffective in getting the JRC value of rock surfaces. The JRC value can be only accurately obtained by back-analysis of shear test results. However, it is shear strength rather than the JRC value that we want to obtain. The shear strength should be deduced from new roughness parameters with a clear physical meaning.
Experimental results showed that for the same rock type and surface morphology, shear strength changes when the shear direction is different (Jing 1990). Subjected to a shear load, asperities with the slope facing to the shear direction contact and deform, while ones with the slope opposite to the shear direction separate from each other (Yeo et al. 1998; Gentier et al. 1997). The local apparent dip of asperities with respect to the shear direction contributes to the shear strength of rock joints (Grasselli and Egger 2003). Reasonable roughness parameters should reflect the directionality of a rock surface.
In this paper, two new roughness parameters are proposed, providing the possibility to objectively quantify the roughness of rock joints. Moreover, these two roughness parameters can predict the shear strength of rock joints in different directions. To estimate the peak shear strength, a new equation is proposed and further validated by experimental data (Xia et al. 2014).
The shear behavior of rock asperities
The asperities between joints can be replaced by equivalent rectangular asperities (Kwon et al. 2010). When normal and shear loads are applied, the rectangular asperity exhibits two failure modes: dilative and non-dilative failure, as illustrated in Fig. 1.

Two shear failure modes of rectangular asperities: a dilative failure (m < mc) and b non-dilative failure (m > mc), where N is the normal force and T is the shear force
The aspect ratio m = h/l, where h and l are the height and length of an asperity, and the critical aspect ratio mc jointly determine the failure mode. When m is less than mc, the mode is dilative failure (see Fig. 1a), and the angle between the failure plane and horizontal direction is θ = 45°−φf/2, where φf is the peak friction angle of an intact rock. When m is more than mc, the mode is non-dilative failure (see Fig. 1b). The failure plane is horizontal and there is no dilation in the whole shear process.
The critical aspect ratio mc is obtained as
where σn is the normal stress and τc is the cohesion of an intact rock. The shear strength of a single rectangular asperity is represented by
Given that a reasonable model relating the shear behavior of the whole surface with that of a single asperity, the shear strength of rock joints can be determined. However, the rough surface involves reciprocal extrusion, shearing, friction, and gap between asperities; it is difficult to determine the shear strength of a whole joint surface by accurately calculating the shear strength of every single asperity.
As shown in Fig. 2(a), the height of asperities increases along the shear direction. The reduced height of the n-th asperity can be represented by the height difference, i.e., hn = Hn − Hn − 1. In Fig. 2(b), the height of the n-th asperity is less than that of the (n−1)-th asperity. Because the n-th asperity is protected by the (n−1)-th asperity from participating in the interaction between two asperities, the reduced height of the n-th asperity is 0. However, if the height of the (n−2)-th asperity is less than that of the (n−1)-th and n-th asperities and their protrusions are obvious, it is necessary to consider the influence of the (n−2)-th asperity. Therefore, the reduced height of the n-th asperity is taken as an average of p and q, where p is the height difference between the n-th and (n−1)-th asperities and q is the height difference between the n-th asperity and the (n−2)-th asperity, and thus, hn = max[(2Hn − Hn − 1 − Hn − 2)/2, 0]. Based on the reduced height of a single asperity, the roughness parameter c of the entire surface is presented as \( c=100\sum \limits_1^N{h}_{\mathrm{n}}/L \), where L is the projection length of a morphology profile and N is the total number of asperities in the shear direction. Here, it is worth noting that c is the average slope angle in the shear direction. If the rock surface contains a number of regularly spaced teeth with an equal inclination angle (Patton 1966), c is equal to 100 tani, where i is the inclination angle of teeth.

The two typical types of rectangular-shaped asperities. The shear direction is from left to right
The frictional behavior of rock asperities
The maximum possible contact area reflects the degree of roughness of a rock surface (Grasselli and Egger 2003). The joint surface can be divided into two regions (see Fig. 3). One is the climbing region involving extrusion, wear, and shearing between contact asperities, which mainly affects shear strength. The other is the back slope region, which has little effect on shear strength. Therefore, it is necessary to establish a roughness parameter reflecting the friction behavior of the surface morphology according to the climbing region.

Illustration of two types of asperities
Grasselli and Egger (2003) proposed that the maximum possible contact area ratio A0 is that of Ad to At, where Ad is the total climbing area facing to the shear direction and At is the actual area of the joint surface, namely
For a three-dimensional grid, we have
where
- N x :
-
is the number of points along the x-axis,
- N y :
-
is the number of points along the y-axis,
- ∆x and ∆y:
-
are the sampling steps along x and y axes, and
- Z ij :
-
is the height of the sampling point (i, j) (Belem et al. 2000).
The maximum possible contact area ratio A0 reflects the initial characteristics of the surface morphology, with a range of 0 < A0 < 1. However, A0 does not take into account the conditions with the same climbing area but different back slope areas.
Because the back slope regions do not affect the shear mechanical properties (see Fig. 3), the shear mechanical properties of the two types of asperities are the same. Here, a reasonable roughness parameter should be identical. However, the roughness parameter A0 is different, which cannot link with the shear strength. Therefore, the parameter At in Eq. (3) was amended as the nominal area An, which is defined as the projection of the joint surface on its mean plane.
A new roughness parameter A1 is proposed as
with
where the roughness parameter A1 > 0 shows the initial characteristics of the surface morphology and stresses the importance of the climbing region.
Roughness parameters c and A 1
Acquisition of ten standard JRC profiles
The image segmentation technology was adopted to obtain the coordinate information of the ten standard JRC profiles. With the help of Matlab software, the image information of the JRC profile was transformed into a matrix that stores the gray value of each pile. The pixel whose gray value is smaller than a given threshold was transformed to 0, and such pixels are the points on the standard JRC profile. The coordinates of the JRC profile were obtained after the length of a profile being scaled up to the standard length of 10 cm. In the printing process, due to the problem of typesetting, the profile and the 10-cm scale bar may not be aligned parallel. If the best-fitted line of points lying on each standard profile is not parallel to the scale bar, the corresponding angle should be adjusted. The roughness parameter Z2 is usually applied to demonstrate the roughness of the surface profiles (Tse and Cruden 1979). Compared with those given by Tse and Cruden (1979), Yu and Vayssade (1991), and Yang et al. (2001), the results obtained are well consistent with the previously published results (Fig. 4), indicating that the extracted data in this method can well reflect the roughness of standard JRC profiles.

The value of Z2 of each standard JRC profile with a sampling interval of a 0.5 mm and b 1 mm
Calculation of roughness parameter c
It is shown that the size of the damaged asperities is on the order of millimeters (Tatone and Grasselli 2010), so the sampling interval was chosen as 1 mm. Then, the coordinate information of the JRC = 16.7 profile was obtained, which is equivalent to continuous rectangular asperities. As shown in Fig. 5, if the local no. 1 asperity is the first asperity of the whole profile, its reduced height is 0. There is only one single asperity in front of no. 2 asperity, and then the reduced height is obtained as h2 = max[H2 − H1, 0]. There are two asperities in front of no. 3 asperity, considering the influence of the two front asperities; the reduced height of no. 3 asperity is obtained as h3 = max[(2H3 − H2 − H1)/2, 0]. Similar to no. 3 asperity, the reduced heights of the rest of asperities are all calculated as hn = max[(2Hn − Hn − 1 − Hn − 2)/2, 0]. The parameters c obtained from the ten standard JRC profiles with the sampling interval of 1 mm are listed in Table 1. The value of JRC was determined through back-analyzing of shear test results on standard JRC profiles (Barton 1973). cF and cR denote the parameter c for shearing in forward and reverse direction, respectively. The roughness parameter c can distinguish the roughness of the same standard JRC profile in different directions, which provides the possibility to propose a new shear strength equation reflecting the direction-dependency of shear strength of rock joints.

The asperities of JRC = 16.7 profile with the sampling interval of 1 mm
The six sets of morphology profiles with horizontal and vertical coordinates being normalized by the same scale in Fig. 6 cannot be distinguished from each other using the roughness parameters of Z0 and Z1 (Yi et al. 2006). However, these profiles can be distinguished well with the parameter c.

A set of profiles with the same Z0 and Z1 (Yi et al. 2006), where the value of c is a 7.19, b 11.99, c 16.79, d 21.58, e 26.38, and f 31.11
Calculation of roughness parameter A 1
The JRC = 6.7 profile can be approximated by fragments that are formed by linking the adjacent points extracted from the JRC = 6.7 profile with the sampling interval of 1 mm (see Fig. 7). Based on Eq. (5), the roughness parameter A1 of JRC = 6.7 profile is the ratio of the length of all the red lines (with dip angle more than 0°) to the horizontal projection length of the profile. The parameter A1 of the standard JRC profiles with the sampling interval of 1 mm is listed in Table 2. A1L and A1R denote the parameter A1 for shearing in forward and reverse direction, respectively. Similar to the parameter c, when JRC is the same, the parameter A1 obtained in different directions is different.

The whole JRC = 6.7 profile and the line segments with an apparent dip angle more than 0°
A new shear strength criterion
According to the Mohr–Coulomb criterion, τ = σn tan(φb + ip), where φb is the basic friction angle and ip is the peak dilation angle. The basic friction angle is constant while the peak dilation angle varies with the normal stress. Therefore, the key to study the peak shear strength is how to determine the peak dilation angle reasonably.
The peak shear strength equation proposed by Maksimović (1992) is represented as
where ∆φ is the inclination of the steepest asperities and is equal to the initial dilation angle and pN is the median angle pressure when the peak dilation angle is equal to ∆φ/2. In Eq. (7), there is no singular point when the normal stress is zero; however, it is necessary to get at least three dilation angle-normal stress data points to calculate ∆φ. Therefore, how to reasonably determine ∆φ is the key to improve the applicability of Eq. (7).
The initial dilation angle only depends on the roughness of a rock surface (Ghazvinian et al. 2010). The two roughness parameters reflect shear strength and the characteristics of friction, and then, the shearing action can be comprehensively reflected by a parameter, w = c + 2.3A1, where 2.3 represents the proportion of friction. The relationship between the roughness parameter w and the initial dilation angle ip0 is proposed as
where σc is in the unit of megapascals.
The predicted results of ip0 based on Eq. (8) are compared with the test results in Fig. 8. The data of ip0 are obtained based on Barton’s criterion when σc = 25, 50, and 100 MPa, and the parameter w is obtained from the standard JRC profiles. The numbers 2.5, 2.8, and 3.1 stand for 1.49σc0.16 in Eq. (8) when σc = 25, 50, and 100 MPa.

The relationship between ip0 and w
Combining Eq. (7) with Eq. (8), we can obtain
where pN is 0.1 JCS (Maksimović 1996) and σc is in the unit of megapascals. The peak dilation angle is determined by
According to Schneider (1976) and Jing (1990), the peak dilation angle is individually represented as
and
For the standard JRC = 10–12 profile, the test and predicted results are compared in Fig. 9, where σc is 25 MPa. The coefficients k in Eqs. (11) and (12) are 0.25 and 5.64, which are obtained by regression analysis. Though the result obtained by Eq. (10) is slightly more than test rest, the trend is better than that fitted by Eqs. (11) and (12).

Comparison between testing and theoretical results
In Fig. 10, the results based on Eq. (9) are compared with the shear test results of nine standard JRC profiles, where σc = 25 MPa and the basic friction angle is 30°. For JRC < 12, Eq. (9) can accurately predict the test results. For JRC > 12, the results are slightly different from the test results under a high normal stress, but a high degree of coincidence is seen in the range of 0–0.5σc. This range is also the stress state of most shear tests in engineering (Maksimović 1996).

Comparison of testing results and the calculated values by using Eq. (9) for each standard JRC profile
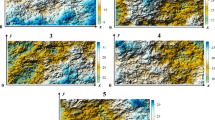
For the standard JRC profiles, the calculation results of Barton’s equation represent the test results. Inability of accurately determining the JRC values may lead to the lose efficacy of Barton’s equation (Kulatilake et al. 1995; Xia et al. 2014). To further explain the applicability and validity of Eq. (9) for an arbitrary rock surface morphology, the predicted results are compared with the test results (Xia et al. 2014), where the shear direction is from left to right. The surface morphology is represented by nine parallel profiles with an equal distance of 15 mm (see Fig. 11).

The map of rock surfaces (Xia et al. 2014)
Substituting the average value of w (see Table 3), the uniaxial compressive strength 27.5 MPa, and the basic friction angle 35° (Xia et al. 2014) into Eq. (9), we can obtain the shear strength. As shown in Fig. 12, Eq. (9) can accurately predict the shear strength of rock joints, where Barton 1 stands for Barton’s equation in which JRC is determined by a straight edge method (Barton and Bandis 1990), Barton 2 stands for Barton’s equation in which JRC is determined by Z2 (Tse and Cruden 1979), and Barton 3 stands for Barton’s equation in which JRC is determined by visual comparison with the ten standard JRC profiles (Xia et al. 2014). The JRC values obtained by these methods are smaller than the test values.

Comparison of calculated and testing results (Xia et al. 2014)
Discussion
The influence of a sampling interval
Natural joint surface has a self-affine fractal character, and its area can be represented as (Xie et al. 1997):
where AT (δ) is the area of the rough surface measured by the scale of δ, AT0 is the area measured by the scale of 1 mm, and D is the fractal dimension of the rough surface. However, the measured surface area with different scales cannot well reflect the shear strength of rock joints, and the fractal dimension D obtained is independent of the shear direction. Referring to the above method, a power–law relationship is proposed as
where
- c Δ :
-
is the parameter of c obtained with the sampling interval of ∆,
- c 0 :
-
is the parameter of c obtained with the sampling interval of 1 mm, and
- D c :
-
is the fractal dimension of the morphology profile.
Then, we have
The roughness parameters can be obtained with best-fitting lines based on Eq. (15), where the slope is 1−Dc, and the intersection point with vertical coordinate is ln(c0). When the sampling interval is 0.5, 1, 1.5, 2, 2.5 and 3 mm, the relationship between the parameter cΔ and the sampling interval ∆ of JRC = 16.7 profile with forward and reverse analysis is shown in Fig. 13. The distribution of ln (c∆)-ln(∆) is linear with a relatively high correlation, indicating that the surface profile is fractal. The fractal dimensions in forward and reverse directions of each standard JRC profiles are listed in Table 4.

The relationship between ln(∆) and ln (c∆)
The range of roughness parameter c
The roughness parameter c of the JRC = 16.7 profile was calculated from the scale of 0.5 to 10 mm with the step of 0.5 mm (see Fig. 14). The data of ln (c∆)-ln(∆) has an obvious linear character in the scale range of 0.5–3 mm, in which the profile has a stable fractal dimension. However, the fractal dimension changes greatly when the scale is larger than 3 mm. Yi et al. (2006) also found that the fractal dimension changes with the scale, and when the scale is less than a certain degree, the fractal dimension is stable. The scale of 0.5–3 mm is also the scale of joint failure, and this range can be regarded as the application range of the proposed roughness parameter. In the measurement process, the measurement scale needs not be fixed. The roughness parameter c0 can be obtained by linear fitting only by knowing two values of c with two different sampling intervals in this range. This approach reduces the difficulty of obtaining the parameter and is beneficial to a wide application in engineering.

The data of ln (c∆)-ln(∆) in the range of 0.5 to 10 mm
Conclusions
In this paper, two roughness parameters of c and A1 are proposed. Parameter c reflects the shear behavior of the rock asperity with the physical meaning being the average slope angle of the rock surface in the direction of shear deformation. Parameter A1 reflects the frictional behavior of the rock asperity with the physical meaning being the maximum possible contact area in the shear direction. The proposed parameters have advantages in considering surface roughness anisotropy and showing clear mechanical meaning relative to the statistical parameters, and relative to the JRC method, they can be applied to objectively quantify the roughness of rock surface morphology.
The proposed roughness parameters can be incorporated into a new peak shear strength criterion, which are correlated well with the standard JRC shear test results. Furthermore, the predicted values show good agreement with those obtained experimentally. In addition, it is shown that the Mohr–Coulomb criterion is more easily accepted in an engineering point of view. With two different sampling intervals in the sampling interval of 0.5–3 mm, the roughness parameter c can be obtained by linear fitting. This approach reduces the difficulty of obtaining the new parameter and is beneficial to a wide application in engineering.
References
Barton N (1973) Review of a new shear-strength criterion for rock joints. Eng Geol 7(4):287–332. https://doi.org/10.1016/0013-7952(73)90013-6
Barton N, Bandis S (1990) Review of predictive capabilities of JRC-JCS model in engineering practice. In: Proceeding of International Conference on Rock Joints. A, A, Balkema, Rotterdam, pp 603–510
Belem T, Homand-Etienne F, Souley M (2000) Quantitative parameters for rock joint surface roughness. Rock Mech Rock Eng 33(4):217–242 https://doi.org/10.1007/s006030070001
Gentier S, Lamontagne E, Archambault G, Riss J (1997) Anisotropy of flow in a fracture undergoing shear and its relationship to the direction of shearing and injection pressure. Int J Rock Mech Min Sci 33(34):412–412. https://doi.org/10.1016/S0148-9062(97)00177-0
Ghazvinian AH, Taghichian A, Hashemi M (2010) The shear behavior of bedding planes of weakness between two different rock types with high strength difference. Rock Mech Rock Eng 43(1):69–87. https://doi.org/10.1007/s00603-009-0030-8
Grasselli G, Egger P (2003) Constitutive law for the shear strength of rock joints based on three-dimensional surface parameters. Int J Rock Mech Min Sciences 40(1):25–40. https://doi.org/10.1016/S1365-1609(02)00101-6
Huang SL, Oelfke SM, Speck RC (1992) Applicability of fractal characterization and modelling to rock joint profiles. Int J Rock Mech Min Sci Geomech Abstr 29(2):89–98. https://doi.org/10.1016/0148-9062(92)92120-2
Jing L (1990) Numerical modeling of jointed rock masses by distinct element method for two and three dimensional problems. Dissertation, Lulea University of Technology
Kang MC, Kim JS, Kim KH (2005) Fractal dimension analysis of machined surface depending on coated tool wear. Surf Coat Technol 193(1):259–265. https://doi.org/10.1016/j.surfcoat.2004.07.020
Kulatilake PH, Shou G, Huang TH (1995) New peak shear strength criteria for anisotropic rock joints. Int J Rock Mech Min Sci Geomech Abstr 32(7):673–697. https://doi.org/10.1016/0148-9062(95)00022-9
Kwon TH, Hong ES, Cho GC (2010) Shear behavior of rectangular-shaped asperities in rock joints. KSCE J Civ Eng 14(3):323–332. https://doi.org/10.1007/s12205-010-0323-1
Lee YH, Carr JR, Barr DJ (1990) The fractal dimension as a measure of the roughness of rock discontinuity profiles. Int J Rock Mech Min Sci Geomech Abstr 27(6):453–464. https://doi.org/10.1016/0148-9062(90)90998-H
Liu XG, Zhu WC, Yu QL (2017) Estimation of the joint roughness coefficient of rock joints by consideration of two-order asperity and its application in double-joint shear tests. Eng Geol 220:243–255. https://doi.org/10.1016/j.enggeo.2017.02.012
Maerz NH, Franklin JA, Bennett CP (1990) Joint roughness measurement using shadow profilometry. Int J Rock Mech Min Sci Geomech Abstr 27(5):329–343. https://doi.org/10.1016/0148-9062(90)92708-M
Maksimović M (1992) New description of the shear strength for rock joints. Rock Mech Rock Eng 25(4):275–284. https://doi.org/10.1007/BF01041808
Maksimović M (1996) The shear strength components of a rough rock joint. Int J Rock Mech Mining Sci Geomech Abstr 33(8):769–783. https://doi.org/10.1016/0148-9062(95)00005-4
Olsson R, Barton N (2001) An improved model for hydromechanical coupling during shearing of rock joints. Int J Rock Mech Min Sci 38(3):317–329. https://doi.org/10.1016/S1365-1609(00)00079-4
Patton F D (1966) Multiple modes of shear failure in rock. Proceedings of the 1st international congress on rock mechanic. Lisbon, pp 509–513
Salari-Rad H, Mohitazar M, Dizadji MR (2013) Distinct element simulation of ultimate bearing capacity in jointed rock foundations. Arab J Geosci 6(11):4427–4434. https://doi.org/10.1007/s12517-012-0667-6
Schneider HJ (1976) The friction and deformation behaviour of rock joints. Rock Mech 8(3):169–184. https://doi.org/10.1007/BF01239813
Scholz CH (1998) Earthquakes and friction laws. Nature 391(6662):37–42. https://doi.org/10.1038/34097
Tatone BSA, Grasselli G (2010) A new 2D discontinuity roughness parameter and its correlation with JRC. Int J Rock Mech Min Sci 47(8):1391–1400. https://doi.org/10.1016/j.ijrmms.2010.06.006
Tse R, Cruden DM (1979) Estimating joint roughness coefficients. Int J Rock Mech Min Sci Geomech Abstr 16(5):303–307. https://doi.org/10.1016/0148-9062(79)90241-9
Wang WL, Wang TT, Su JJ (2001) Assessment of damage in mountain tunnels due to the Taiwan Chi-Chi Earthquake. Tunnelling & Underground Space Technology Incorporating Trenchless Technology Research 16(3):133–150. https://doi.org/10.1016/S0886-7798(01)00047-5
Xia CC, Tang ZC, Xiao WM (2014) New peak shear strength criterion of rock joints based on quantified surface description. Rock Mech Rock Eng 47(2):387–400. https://doi.org/10.1007/s00603-013-0395-6
Xie H, Wang JA, Xie WH (1997) Fractal effects of surface roughness on the mechanical behavior of rock joints. Chaos, Solitons Fractals 8(2):221–252. https://doi.org/10.1016/S0960-0779(96)00050-1
Yang ZY, Lo SC, Di CC (2001) Reassessing the joint roughness coefficient (JRC) estimation using Z 2. Rock Mech Rock Eng 34(3):243–251. https://doi.org/10.1007/s006030170012
Yeo IW, Freitas MD, Zimmerman RW (1998) Effect of shear displacement on the aperture and permeability of a rock fracture. International Journal of Rock Mechanics & Mining Science 35(8):1051–1070. https://doi.org/10.1016/S0148-9062(98)00165-X
Yi C, Wang CJ, Zhang L (2006) Study on description index system of rough surface based on bi-body interaction. Chin J Rock Mech Eng 25(12):2481–2492. https://doi.org/10.3321/j.issn:1000-6915.2006.12.014
Yu X, Vayssade B (1991) Joint profiles and their roughness parameters. Int J Rock Mech Min Sci Geomech Abstr 28(4):333–336. https://doi.org/10.1016/0148-9062(91)90598-G
Funding
This work was supported by the National Key Basic Research Program of China (973) (Project No. 802015CB575) and the National Natural Science Foundation of China (Project Nos. 51478027 and 51774018). C. Lu is supported by the Open Fund of State Key Laboratory for GeoMechanics and Deep Underground Engineering, China University of Mining & Technology (Beijing) (Project No. SKLGDUEK1516).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Ban, L., Qi, C. & Lu, C. A direction-dependent shear strength criterion for rock joints with two new roughness parameters. Arab J Geosci 11, 466 (2018). https://doi.org/10.1007/s12517-018-3818-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12517-018-3818-6