
Abstract
The natural-field magnetotelluric (MT) method has proven very useful for mapping the geothermal fields as resistivity sections. The depth of investigation of the MT method is sufficiently large to penetrate deep into the upper crust. MT soundings along two transects across Mahallat geothermal field in Iran were carried out to determine the crustal structure in the region. The selected MT profiles in the region cross over the hydrothermally altered zones and different geological structures. Data were acquired along two profiles crossing the Mahallat hot springs with a total of 28 MT stations in a frequency range of 8,000 to 0.008 Hz. Spacing between stations was kept 500 m for a good resolution. We have used the code MT2DInvMATLAB for inversion using the method of finite elements for forward modeling. Apparent resistivity and phase data of transverse electric (TE), transverse magnetic (TM), and TE + TM modes along each profile were modeled. The geothermal fluid reservoir is resolved at 1,000 to 3,000 m depth and the geothermal resource is estimated to be located at 7,000 m or deeper.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Magnetotellurics is a passive electromagnetic method, which uses the natural occurring electromagnetic field. The long and short periodic signals originate from fluctuations in the intensity of the solar wind and global lightning activity, respectively. The electromagnetic energy released in discharges propagates with slight attenuation over large distances in a waveguide between the ionosphere and Earth’s surface. At large distances from the source, this is a plane wave with frequencies from about 10−5 to 105 Hz. The magnetotelluric fields can penetrate the Earth’s surface and induce telluric currents in the subsurface.
Magnetotelluric (MT) studies are important; they constrain the fluid content and thermal structure, which are the key parameters for defining the rheology of the crust and upper mantle (Unsworth 2010). This method has been proven to be useful for widespread applications. For example, MT is extensively being used in imaging the fluids in subduction zones and volcanic belts (Jones and Dumas 1993), orogenic regions (Unsworth 2010), delineation of ancient and modern subduction zones (Jones 1993), lithospheric studies (Patro and Sarma 2009), and geothermal studies (Johnston 1992). The aim of the present study was to analyze the potential of two-dimensional (2D) magnetotellurics for the detection of geothermal resources in the Mahallat geothermal in general.
Geothermal resources are ideal targets for EM methods since they produce strong variations in underground electrical resistivity. The Mahallat geothermal reveals favorable conditions for the exploitation of geothermal energy. Local heat flow and temperature maxima in the Mahallat geothermal originate from a strong convectional heat transport mainly in the igneous basement. Such systems may be exploited using enhanced geothermal system technology. By definition, these systems are characterized by an appropriate temperature at depth and natural permeability, which is improved by stimulation techniques. The challenge of geothermal prospection is to predict temperature, permeability, and stress orientation in the subsurface. Since magnetotellurics is an electromagnetic method, it is primarily used to detect resistivity differences in the subsurface. It is in the nature of the induction-based method which provides significant responses for structures of high electric conductivity.
A key issue in the exploration of geothermal systems is the geophysical detection and monitoring, at several kilometers of depth, of reservoirs and sources. High-temperature geothermal systems, which are required for electric power production, usually occur where magma intrudes into high crustal levels (<10 km) and hydrothermal convection can take place above the intrusive body (e.g., Oskooi et al. 2005; Ushijima et al. 2005).
This paper presents interesting results on the Mahallat geothermal area by using the MT surveys and their 2D inversion. Estimated depths for the cap rock, reservoir, and source zones in the geothermal system seem very promising for further exploration and drilling. Moreover, since the Mahallat is in the Iranian volcanic zone, it can be accepted as a model for geothermal exploration in other parts of the volcanic zone. Berktold (1983) reports a conceptual model showing the main elements of this type of geothermal system.
Methodology
We performed 2D inversion of the data using the code MT2DInvMATLAB (Lee et al. 2009) along two profiles. It is an open-source MATLAB software package for 2D inversion of MT data. In our implementation of MT2DInvMatlab, we basically use the method of finite elements for forward modeling to calculate 2D MT responses of geological structures.
Most of the equations used for implementation are of the similar form found in Rodi (1976), except that time dependence is e iwt and strike direction lies along the y axis. One could find the equivalent equations for the case that strike is in the x direction and time dependence is e −iwt in Rodi (1976). In addition, the finite element equations are in a more general form than Rodi’s (1976), since this program can also consider terrain effects in the inversion by incorporating topography into a forward model. The MT 2D forward problem can be represented generally in a discrete form as d m = (A)m, where A is a forward modeling operator which is generally nonlinear, m is a model parameter vector, and d m is a model response (predicted data) vector. With measured data d, the conventional way of solving an ill-posed inverse problem for m in d m = (A)m is based on the minimization of a Tikhonov parametric functional (Tikhonov and Arsenin 1977).
In this program, the smoothness-constrained least-squares inversion is adopted for solving the regularized inverse problems (Siripunvaraporn and Egbert 2000; Mehanee and Zhdanov 2002). It used the reciprocity method in calculation of Jacobian matrix to reduce computational time. In the inversion process, a spatially variable regularization parameter algorithm suggested by Yi et al. (2003) is adopted for smoothness-constrained least-squares inversion with active constraint balancing algorithm which has been implemented to obtain an optimal smoothness constraint. It also supports the incorporation of smoothly varying topography into a forward model by deforming rectangular elements to quadrilateral elements with the elevation of the air–earth interface (Loke 2000).
Geological setting
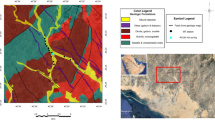
Geological structures in this area are complicated by a dextral rotational movement caused by the northward underthrusting of the Arabian Plate beneath the Iranian Plate. Due to this tectonic framework, the Cenozoic geologic history and the stratigraphy of the region are complex, with units of different structural characteristics. Igneous activity began in the Eocene with the accumulation of volcanics over a sequence of Mesozoic and Paleozoic sediments. These rocks were thermally metamorphosed by an Early Miocene monzonitic batholith, which is elongated in a NW–SE direction (Fig. 1).

Mahallat study area in west central Iran geological map with MT sites location and plate tectonic structure
The area of study is located in two Central Iran and Sanandaj–Sirjan metamorphic zones. A lot of faults pass through the region and divide it into blocks. In the geological dividing of Iran, Mahallat area is located in the volcanic zone of Central Iran. This zone has been one of the active and energetic zones during the different geological periods. This area, from permeability aspect and by regarding to the expansion of calcareous and dolomite units and also the presence of cracks and joints, has a good condition. This faults and cracks are affective in circulation of water in the geothermal system. Figure 2 shows the geological setting and the position of hot springs in the formations of travertine, shale, and sandstone in the area. The outcrops in the study area include Shemshak formation with the lithology of shale and sandstone from Jurassic, Orbitolina limestone unit from Cretaceous, and Qom formation with marl limestone unit belonging to Miocene, and along with these formations, there exist the outcrops of igneous rocks of granodiorite, tuff, and lava in the region. Hot springs are located mostly on travertine deposits and alluviums.

The geological map of the study area
MT data acquisition and processing
Site selection for MT stations is a very important step to ensure good data quality as MT signals are very weak compared to other artificial sources of electromagnetic and cultural noise. The electrical and magnetic field variations have amplitude of a few tens of millivolt and a few nanoTesla, respectively. Therefore, a MT station should be installed away from settlements and power lines. This, however, is not possible to be achieved always due to local logistics and constraints.
The MT survey was carried out at two profiles with 28 stations covering the zone of the hot springs. The survey was designed using a profile system with interval stations of 500 m. The condition of the survey area is dominated by hills covering two thirds of the area where the topographic condition is high. The possible noise originated from human activities in the southern part of the survey area.
An MT survey was carried out using GMS05 (Metronix, Germany) systems in July 2011. Data are stored on an internal hard disk and are downloaded via a connection. Power is supplied by a 12-V external battery. Three magnetometers and two pairs of non-polarizable electrodes are connected to this five-channel data logger. For the registration of magnetic field variations in the range from 10,000 to 0.001 Hz, broadband induction coil magnetometers are used. The electric field variations are registered by measuring potential differences with non-polarizable electrodes. The experimental setup includes four electrodes, which are distributed at a distance of 100 m in north–south (E x ) and east–west (E y ) direction. They are buried at a depth of about 30 cm and coupling to the soil is improved using water. The ADU logger and magnetometers are located in the center, whereas the three induction coils are oriented north–south (H x ), east–west (H y ), and vertical (H z ) at a distance of 10 m from the data logger and at least 1 m from electric field wires and 5 m from every conductive object. The vertical coil was buried to four fifths of its length and covered by a plastic tube in order to prevent recordings from the influence of wind. A self-test including internal calibration is carried out automatically upon starting the measurement. Four frequency bands have been measured at each site: for each stack, the first band (frequency range 256–8,192 Hz) runs less than 1 s, the second band (frequency range 8–256 Hz) runs less than 4 s, the third band (frequency range 0.25–8 Hz) runs less than 60s, and the fourth band (frequency range 0.008–0.25 Hz) runs less than 30 min. About 100 stacks and 30 stacks have been recorded for the three first bands and band 4, respectively. The average recording time at each measurement site was about 18 h. Necessary items for the field campaign, for instance notebook PC’s, desktop PC’s, compasses, hand-held GPS receivers, batteries, cables, mobile phones, 4WD cars, etc., were in service accordingly.
MT data were processed using a code from Smirnov (2003) aiming at a robust single site estimate of electromagnetic transfer functions. Most of the data did not require special preprocessing. For the low frequency band, first differences filter was used to prewhiten the spectrum and remove trends. To perform Fourier analysis, the length of window was selected having 16,384 samples with a 50 % overlap with the neighboring windows. Coherency threshold was set to a high value (0.9), allowing extraction of enough highly coherent segments for further statistics. The robust estimator implemented in the processing code is based on an algorithm of repeated medians.
In southern part of the profiles, since the area of study is populated and close to urban noise sources, some data were not with good quality which justifies the low coherency between the electric and magnetic channels. As a result, some of the noisiest sites/frequencies were excluded from the database. For some sites, very bad electric field data were gathered in either x or y direction, most probably due to the currents directed from various power lines in the area or geothermal activities. Only one main component of the impedance was used for further analysis for such sites. The final results for most parts of data along profiles were of good quality.
Dimensionality analysis and strike estimation
In order to estimate the dimensionality, the rotationally invariant parameter, Swift (1967) skew is evaluated. Swift skew lies between 0 and 1 for real data, indicating deviations from 1D/2D conductivity distribution. However, it is sensitive to galvanic distortions (Bahr 1988) due to small-scale heterogeneities in the near surface and thus may give erroneous view on the dimensionality of the underlying medium (Smirnov and Pedersen 2009). In contrast to the Swift skew, Bahr skew (Bahr 1991) is insensitive to galvanic distortions and provides appropriate dimensionality with an assumption that for a regional 2D structure, the off-diagonal elements of impedance tensor must have the same phase. Swift skew is generally less than 0.3 for most of the sites that represent 2D case but there are several sites where Swift skew is rather large, thus indicating either 3D effects or near-surface distortions (Dhanunjaya Naidu et al. 2011). However, Bahr’s phase sensitive skew is below 0.4 (Fig. 3) for majority of the sites, which means higher Swift skew values are due to the presence of galvanic distortions and confirms the 2D assumption.

Bahr’s 3D/2D skew and Swift’s skew
The next step is to determine the strike direction. Regional strikes are calculated following the “phase tensor” scheme (Caldwell et al. 2004). In this approach, the phase relationship contained in MT impedance data is considered as a second-rank tensor, “phase tensor”. Decomposing the tensor to its SVD form, the orientation of the strike angle is determined as the direction which produces maximum or minimum impedance phases. Since there is no knowledge as to which of the maximum or minimum phases correspond to the transverse electric (TE) or transverse magnetic (TM) polarization, a 90° ambiguity remains in determining the strike direction. In practice, this ambiguity is resolved by the use of the vertical magnetic field data and consideration of regional geological strikes (Montahaie et al. 2010). Figure 4 displays electric strike direction in rose diagrams for the two profiles and at all periods. The resolution of rose diagrams is 5°. It yields an average strike direction of 0° for the two profiles. Accordingly, the N-S direction would be identified as the major strike direction for the whole profiles.

Rose diagram showing electrical strike direction for profiles. Calculations made for the whole periods and sites
Impedance polar diagram for some frequencies at MT site a7 are presented in Fig. 5 to demonstrate the variation of Z xx and Z xy as different rotations are applied to the impedance tensor. The results show a dominant strike direction of SW-NE for the MT data. An impedance polar diagram is divided into a matrix of small plots. Each of these plots corresponds to one frequency. It shows Z xx and Z xy drawn in polar form as functions of rotation angle. They are drawn in plan view with north up. In each plot, a vector indicating the current rotation angle for a certain frequency is displayed. The off-diagonal components, represented by the red lines, show a strong 2D response except at the shortest period, with a stable direction of maximum electric field aligned along the axis of the trough.

Impedance polar diagrams for MT site a7 for some frequencies which are selected randomly
2D inversion and interpretation
The models obtained from the inversion of the TE and TM modes of the MT data as well as the inversion of the joint TE and TM mode data show similar features along the profiles. To avoid probable unrealistic small errors on the data for the 2D approximation, an error floor of 15 % on the apparent resistivity and 5 % for the phase were used. The final root mean square misfit was around 0.2 for all inversions (Fig. 6). Static shifts were corrected prior to the inversion based upon the geology results. Although the study area has a topographic relief, the measurement sites were generally selected to be located in area with little topographic variations so that the topography relief could be neglected in the inversion of MT data. The apparent resistivity and phase data and model responses from the inversion of joint TE and TM mode for profiles are shown in Fig. 7. It shows a fairly good agreement between the observed data and model responses along the profiles. The resistivity models from the TE and TM mode are shown in Fig. 8. Joint 2D inversion of the TE and TM mode data is performed in order to derive an overall picture of the subsurface conductivity structure that would explain the data from both polarizations simultaneously. Resistivity model from the joint inversion is shown in Fig. 9 together with the demonstration and division of zones in the geothermal structure.

Number of iterations against R.M.S misfit for the derived 2D model

Joint TE and TM mode data and responses of the 2D inversion along two profiles

2D inversion model of TE and TM mode data

2D inversion model of joint TE and TM mode data
Magnetotelluric TE, TM, and TE + TM models have some differences when conductivity structures are displayed. It is difficult to choose one of the three as the true representative of the subsurface. A common feature in all models with different geometrical shapes should be accepted with greater level of confidence (Roy et al. 2004). Anyway, our interpretation is on the base of TE + TM. Along profile a (Fig. 8), a thin surface conductive zone and a resistive zone in the depth are depicted which are common in all three modes of TE, TM, and joint TE and TM modes. In the models of TM and joint TE and TM, we can see a resistive layer below the conductive surface layer which continues to the depth of 1,000 m. In profile b, a thin surface conductive layer and below it a resistive layer and then a resistive zone in the middle of the profile are resolved in TE, TM, and joint TE and TM modes and also there is a conductive zone in depth 10 km which has been surrounded by a thin resistive zone.
The results of the model of Fig. 9 considering the geological information of Figs. 2 and 10 are as follows: the thick surface conductor along two profiles has a resistivity of 10–100 Ω-m. This conductive layer at the top can be interpreted as the top soil which is saturated by penetrated water (zone a). Then, there we observe transition to a resistive unit. This second layer is resistive (>500 Ω-m) and shows a variable thickness along the 2D section, passing from a few 10 m at site 4b to about 1,500 m at site 2a which can be assigned to impermeable rocks such as Shemshak formation with the lithology of shale and sandstone belonging to Jurassic for profile a and the rocks of rhyolitic and basic lava of Eocene for profile b are interpreted as the cap rock of the geothermal system (zone c). Below this resistive layer, there is a decrease of resistivity with depth along two profiles. This conductive layer (<10 Ω-m), showing variable thickness along the profile, is most naturally interpreted as the Permian limestone for profile a and Cretaceous limestone for profile b that acts as the system of reservoir (zone r). Below this conductor, a very resistive zone is observed (>1,000 Ω-m). This resistive intrusive mass is interpreted as the bed rock zone (zone b) along profile b and a heat source (zone s) in profile a. All of these features are common in two profiles, but at greater depths in profile b, there is a highly conductive (<10 Ω-m) structure that domes upwards to a depth of about 8 km in the middle of the profile b (zone s). This conductive zone can be interpreted as partial melt located on top of a magmatic heat source most probably. This conductive structure could be the real source of the heat even for profile a. It is most naturally interpreted so that the magmatic intrusions are acting as a heat source for the geothermal system, although there are no temperature and geochemistry data to confirm the presence of magma, but with due attention to the geological information, we can claim that there was a magmatic action in Eocene period that it has made the igneous intrusive mass. The presence of the granodiorite rocks in the north of the area at the surface is another reason for this claim. The system is now cooling at the surface except in hot springs, but we can see the significance of the main magma chamber at 10 km depth along the profile b. The faults shown by white lines in Fig. 9 are conductive zones due to the penetration of water in cracks.

Suggested model for the geothermal structure in area with due attention to 2D inversion results and geological structure
Conclusions
Mahallat geothermal field is a potential geothermal system in west central Iran. In this paper, data from 28 MT stations along two profiles were interpreted in order to assess the location and depth of the reservoir in the shape of conductivity structures. We performed 2D inversion of the data using the code MT2DInvMATLAB for TE, TM, and joint TE and TM modes. The results show remarkable signatures as subsurface conductivity variations. The conductive layer at the surface can clearly be interpreted as the flow of the fluids in the fractures of the rocks and the top soil which saturated with penetrated hot water. Estimated depth range of the geothermal cap rock, reservoir, and source is from 500 to 1,000 m with a resistive zone, 1,000–3,000 m with a conductive zone, and 7,000 m and deeper with a very conductive zone, respectively. As a result, this first MT survey provided very encouraging information about the resistivity structure of Mahallat geothermal field. The resistivity model of Mahallat area is in a good correlation with the geological features. The common conceptual resistivity model for the geothermal structure and the agreement between the MT model and geological information supports the use of the current electromagnetic technique in this geothermal region.
References
Bahr K (1988) Interpretation of the magnetotelluric impedance tensor: regional induction and local telluric distortion. J Geophys 62:119–127
Bahr K (1991) Geological noise in magnetotelluric data—a classification of distortion types. Phys Earth Planet Inter 66(1–2):24–38
Berktold A (1983) Electromagnetic studies in geothermal regions. Geophys Surv 6:173–200
Caldwell T, Bibby H, Brown C (2004) The magnetotelluric phase tensor. Geophys J Int 158:457–469
Dhanunjaya Naidu G, Manoj C, Patro P, Sreedhar S, Harinarayana T (2011) Deep electrical signatures across the Achankovil shear zone, Southern Granulite Terrain inferred from magnetotellurics. Gondwana Res 577:367–389
Johnston J, Pellerin L, Hohmann G (1992) Evaluation of electromagnetic methods for geothermal reservoir detection. Geotherm Resour Counc Trans 16:241–245
Jones A, Dumas I (1993) Electromagnetic images of a volcanic zone. Phys Earth Planet Interiors 81:289–314
Lee S, Kim J, Song Y, Lee C (2009) MT2DInvMatlab—a program in MATLAB and FORTRAN for two-dimensional magnetotelluric inversion. Comput Geosci 35:1722–1734
Loke M (2000) Topographic modeling in electrical imaging inversion. 62nd Meeting of the European Association of Exploration Geoscientists, Glasgow, Scotland, pp. 1–4
Mehanee S, Zhdanov M (2002) Two-dimensional magnetotelluric inversion of blocky geoelectrical structures. J Geophys Res 107:EPM 2-1–EPM 2-11
Montahaie M, Brasse H, Oskooi B (2010) Crustal conductivity structure of a continental margin, from magnetotelluric investigations. J Earth Space Phys 36(2):21–32
Oskooi B, Pedersen L, Smirnov M, Arnason K, Eysteinsson H, Manzella A (2005) The deep geothermal structure of the Mid-Atlantic Ridge deduced from MT data in SW Iceland. Phys Earth Planet Inter 150:183–195
Patro P, Sarma S (2009) Lithospheric electrical imaging of the Deccan trap covered region of western India. J Geophys Res 114:B01102
Rodi W (1976) A technique for improving the accuracy of finite element solutions for magnetotelluric data. Geophys J Roy Astron Soc 44:483–506
Roy K, Dey S, Srivastava S, Biswas S (2004) What to trust in a magnetotellyric model. Geophys J Int 8(2):157–17
Siripunvaraporn W, Egbert G (2000) An efficient data-subspace inversion method for 2-D magnetotelluric data. Geophysics 65:791–803
Smirnov M (2003) Magnetotelluric data processing with a robust statistical procedure having a high breakdown point. Geophys J Int 152:1–7
Smirnov M, Pedersen L (2009) Magnetotelluric measurements across the Sorgenfrei–Tornquist Zone in southern Sweden and Denmark. Geophys J Int 176:443–456
Swift C (1967) A magnetotelluric investigation of an electrical conductivity anomaly in the south-western United States, PhD thesis. M.I.T., Cambridge, MA, USA
Tikhonov A, Arsenin V (1977) Solution of ill-posed problems. Wiley, New York, 258
Unsworth M (2010) Magnetotelluric studies of active continent–continent collisions. Surv Geophys 31:137–161. doi:10.1007/s10712-009-9086-y
Ushijima K, Mustopa E, Jotaki H, Mizunaga H (2005) Magnetotelluric soundings in the Takigami geothermal Aria, Japan. Proc. World Geothermal Congress, Antalia
Yi M, Kim J, Chung S (2003) Enhancing the resolving power of least-squares inversion with active constraint balancing. Geophysics 68:931–941
Acknowledgments
The research council of the University of Tehran (UT) is acknowledged for the financial support of the first author’s sabbatical leave at Uppsala University (UU) in the period of October 2011 to October 2012. The Department of the Earth Sciences of UU is also appreciated for hosting the first author as guest researcher. We would like to thank Dr. M. Mirzaei from Arak University in Iran for the financial support of the field work and also Dr. M. Montahaee for her useful guidance on the data processing.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Oskooi, B., Darijani, M. 2D inversion of the magnetotelluric data from Mahallat geothermal field in Iran using finite element approach. Arab J Geosci 7, 2749–2759 (2014). https://doi.org/10.1007/s12517-013-0893-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12517-013-0893-6