
Abstract
The paper investigated the effects on a person being touched by a robot to motivate her. Human science literature has shown that touches to others facilitate efforts of touched people. On the other hand, in the human–robot interaction research field, past research has failed to focus on the effects of such touches from robots to people. A few studies reported negative impressions from people, even if a touch from a person to a robot left a positive impression. To reveal whether robot touch positively affects humans, we conducted an experiment where a robot requested participants to perform a simple and monotonous task with/without touch interaction between a robot and participants. Our experiment’s result showed that both touches from the robot to the participants and touches from the participants to the robot facilitated their efforts.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Social facilitation, which is the tendency for people to do simple and monotonous tasks better in the presence of others, is one interesting social behavior of humans [2, 3]. This phenomenon has been found not only in humans but also in computer agents. For example, Rickenberg et al. reported the facilitation effects of computer agents [4], and other work reported the facilitation effects of a robot’s presence [5, 6].
In human science literature, physical interactions, particularly haptic interactions, change the behaviors of others and facilitate their efforts. Burgoon et al. reported that touching positively affects impressions [7]. Other research work suggested that such positive evaluations might increase compliance with requests from a person who did the touching [8]. Several research works reported that touching changes behaviors in actual settings: generous tips [9], compliance with the suggestions of a restaurant’s employee [10, 11], convincing the finders of money in a phone booth to return it [12], and increased sales in stores [13]. These research works suggest that robots that touch humans might produce similar facilitation effects (Fig. 1).
However, no research has clearly investigated facilitation effects through touch interaction with robots. Currently, such physical interactions as touching by robot are mainly used for the direct physical interfaces of robot locomotion [14] or physical assistance for the elderly [15]. A few research work have investigated the effects of touch from people to a robot in therapy context [16, 17]. We note that they are using an animal-like robot to encourage touches from interacting people therefore the robot did not need explicit requests to realize touch interactions.

Robot’s touch
Thus, there are still unknown about facilitation effects through touch interaction, including of a touch from a robot to a person and/or a touch caused by explicit requests by robots, which have different kinds of appearances from past research works. If we could identify such facilitation effects, design of haptic interaction for robots that would contribute to such different applications as education and health-care where people must be motivated to do simple and monotonous but important tasks.
This research investigates three questions. The first is whether a touch from people to a robot facilitates human efforts toward a simple task, even if the robot explicitly requests touch to people. The second is whether a touch from a robot to people also facilitates efforts toward a simple task. The third is the gender effect, because past research [18] found that males more positively react to physical contact than females (we note that their research work focused on handshaking, which has specific meaning in interactions different from our research work); obviously, this conclusion is related to the future design of the touch interaction of robots. Thus, we investigate the effects of physical interaction with robots from a facilitation point of view. To answer these questions, we conducted an experiment where a robot facilitated participant efforts toward a simple and monotonous task through touch interaction.
To make clear the type of touch interaction initiated by a robot or a person, we defined two kinds of touch types based on the robot’s viewpoint: robot’s touch and human’s touch. “Robot’s touch” indicates a touch from a robot to a person, and “human’s touch” indicates a touch from a person to a robot.
2 Related Work
2.1 Facilitation Effects of Robots
Some past research investigated whether the existence of agents facilitates the interaction efforts of people. Rickenberg et al. reported the facilitation effects of computer agents [4]. Robotics researchers confirmed such facilitation effects with robots. Through an experiment with a robot, Woods et al. identified the influence of the social context and social facilitation effects, which include task complexity, evaluation context, and the type of presence [5]. Riether et al. reported significant evidence for the social facilitation effects with a robotic presence [6].
A few research works have focused on the facilitation effects of robot behaviors, but not only on the existence of such agents. Nakagawa et al. concluded that a robot’s whispering behavior increases people’s motivation during a simple and monotonous task [19]. However, these research works did not focus on the effects of facilitation efforts through touch interaction.
2.2 Haptic Interaction with Agents
The advancement of sensing capabilities enables robots to understand human haptic interactions. For example, Salter et al. used a ball type robot with proprioceptive sensors to categorize human–robot interaction [20]. Cooney installed inertia sensors on a humanoid robot to recognize full-body gestures by haptic interactions [21]. Lee et al. developed a doll type robot with skin sensors to recognize haptic interactions [22]. These research works enabled robots to respond more naturally to haptic interaction from people.
Due to an increase of the recognition capabilities of robots, several researchers have started to understand the effects of haptic interaction (particularly touching) by focusing on the changes of the perceptions of people toward a robot through touch interaction. For example, Shibata et al. developed a seal robot named Paro for therapy with senior citizens through interaction including touches from people by it (human’s touches) [16, 17]. These research works reported that human’s touching without explicit requests of touches produced positive feedback to robots, such as increasing friendly impressions.
Other research works focused on touching from robot to people (robot’s touches). Interestingly, these research works suggested the negative effects of robot’s touching, such as negative impressions of a robot. For example, Cramer et al. investigated the effectiveness of touching by a robot and found that it decreases machine-likeness but negatively affects dependability [23, 24]. Tiffany et al. investigated the changes of the impressions of robot’s touches, but their main research focus is the effects of verbal cues during touching [25]. These research works did not focus on the effects on facilitation efforts through touch interaction.
3 Experiment
To evaluate the effectiveness for facilitating people’s efforts, we conducted a laboratory experiment in which participants performed a simple and monotonous task. In this section, we describe its details.
3.1 Hypothesis
3.1.1 Hypothesis About Human’s Touching
Past research works about haptic interaction of robots showed positive effects [16, 17]. Moreover, other research work shows that an explicitly request of a physical contact (whispering behavior) by a robot is accepted and produces positive effects [19]. Therefore we believe that human’s touch interaction would make positive effects even if a robot explicitly request a touch to people. Based on these considerations, we made the following hypothesis:
Prediction 1: People who are touched to the robot will do more of the requested tasks than people who were not touched.
3.1.2 Hypothesis About Robot’s Touching
We assume that robot’s touching will have similar positive effects on interaction with people based on the human science literature. However, several research works showed that robot’s touches from a robot cause negative impressions, which might deleteriously affect interaction. Since the phenomena related to robot’s touching from robots are highly unexplored, we made two contradictory hypotheses about their effects based on different theories and considerations.
To investigate the effects of robot’s touch, we designed the robot to ask the person to touch its hand and then it actively touches the person’s hand that is touching the robot due to limitations of our robot hardware capabilities and safety for a touching behavior by the robot, Thus, robot’s touching behavior conducts a human’s touching behavior first; when the person touches the robot’s right hand, the robot moves its left hand to make contact with the person’s hand. Then the robot strokes the person’s hand with its left hand. These settings would make mixing effects of human’s touch and robot’s touch, therefore we prepared three conditions to investigate each touch effects (details of conditions are described later).
Hypothesis that assumes positive effects
Human science literature has concluded that robot’s touching facilitates the efforts of others. Research on human’s touching in the human–robot interaction field agrees that touch interaction creates positive interaction with people. Physical interaction with a robot is acceptable because humans perceive a robot as a social being [26, 27]. Therefore, we believe that robot’s touching will facilitate people’s efforts toward tasks requested by that same robot. Based on these considerations, we made the following hypothesis:
Prediction 2-A: People who are touched by a robot (and touched to the robot beforehand) will do more requested tasks than people who touched the robot and those who did not touch it.
Hypothesis that assumes negative effects
The past research works, which focused on robot’s touches, showed that such behavior causes negative impressions. Touch interaction is not considered appropriate behavior in every situation [9]. It is also reasonable to assume that people might hesitate to engage in touch interaction from a robot. On the other hand, research on human’s touching showed positive impressions of the robot, indicating that only physical interaction from people is acceptable; in other words, physical interaction initiated by a robot is not acceptable. Therefore, we believe that robot’s touching will not facilitate people’s efforts toward tasks requested by that robot. Based on these considerations, we made the following hypothesis:
Prediction 2-B: People who are touched by the robot (and touched to the robot beforehand) will do fewer requested tasks than people who touched the robot and those who did not touch it.
3.1.3 Hypothesis About Gender Effects
Gender is one considerable factor to relate the effects of touch. Human science literature reports [18] that males perceive physical contact more positively than females. We assume that gender also influences the effects of touching a robot and being touched by it, similar to handshaking behaviors. Based on these considerations, we made the following hypothesis:
Prediction 3: Males who touched the robot will do more requested tasks than females who touched it.
3.2 Robot
For this experiment, we used robovie-mR2 (Fig. 2), an interactive humanoid robot characterized by its humanlike physical expressions. It has four DOFs in its arms, three in its head, and four in its eyes. Its hands are soft sponge balls to ensure safety when it touches a person. The robot is 42 cm tall. We used a corpus-based speech synthesis to generate speech [28].
We installed a pressure sensor (FPM-15PA) in the robot hands to detect pressure. The sensor arrangement is shown on the right side of Fig. 2. The air-filled cuff was stuffed between the component of the left forearm and the sponge ball, so the atmospheric pressure inside the cuff increases when the ball (as the robot’s hand) feels pressure from the participant’s hand. The position of the robot’s hand was controlled in response to the sensor output to prevent touching a person too strongly. To determine adequate threshold values of the sensors that enable consistent touching of participant hands, we empirically adjusted the threshold values to 32 millibars higher than the value without touching to control the arm movement during robot’s touching.

Desktop-sized robot: robovie-mR2
3.3 Touching Behavior
We prepared two touching behaviors for our experiment: human’s touch and robot’s touch. In the human’s touching behavior, the robot extends its right hand and says, “Please hold my hand while I talk to you” (Fig. 3a). The robot did not actively touch the participants.

Touching behavior. a Human’s touching. b Robot’s touching
As written in above, in the robot’s touching behavior, first the robot asks the person to touch its hand and then it actively touches the person’s hand that is touching the robot. Its left hand moves horizontally to widen the space between both of its hands until the sensor value drops below a threshold (Fig. 3b). To design the robot’s touching behavior, we employed the knowledge of human science literature that investigates the effects of touching speed on impressions [29]. Since this paper reported that touching with 5 cm/s speed was evaluated more positively than 0.5 or 50 cm/s, we set the speed of the robot’s hand during robot’s touching at about 5 cm/s.
3.4 Participants
We recruited 33 university students (15 men and 18 women whose ages averaged 20.9, SD is 2.2) from the web regardless of major or specialty and without interaction experience with our robot, to prevent biased attitudes toward the robot.
3.5 Task
In the experiment, we adopted a simple and monotonous task whose degree of effort was objectively measured to investigate whether robot’s touching facilitated human effort. We prepared an on-screen task by referring to a study of behavioral economics (Fig. 4) [30]. In this task, participants dragged a circle on the left side to the square on the right side on the screen as many times as possible. After dragging the circle into the square, the circle disappears, and a new one appears on the left side. The task ends after the participants press the ESC key (they can terminate the task anytime) or the maximum time (10 min) has expired. The participants were not informed of this time period.

Computer task in experiments
3.6 Conditions
We used a between-participant experiment design with three conditions to investigate the robot’s touch effects.
-
No touching the robot asks the participants to perform the task without touching.
-
Human’s touching the robot requests a human’s touch from the participants (Fig. 3a)
-
Robot’s touching after human’s touching the robot requests a human’s touch from the participants and then actively touches them when they are listening to it (Fig. 3b).
3.7 Procedure
The experiment was conducted in a laboratory room (Fig. 5). “robovie-mR2” was placed on a table, and a laptop computer for the task was placed on another table. Before the session, participants were given a brief description of the experiment’s purpose and procedure. They were randomly assigned to the experiment conditions; thus eleven participants were assigned to each condition. The gender ratio in each condition was counter-balanced.

Experimental settings
At the beginning of the experiment, the participants sat in front of the robot. During the interaction, the robot requested them to perform the task. After the robot’s request, they started the task. We prepared a 10-s training phase with which they could practice the dragging task. The participants could terminate the task whenever they want.
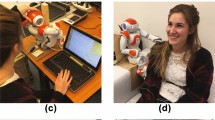
The flow of the robot’s conversation, behaviors, and typical responses of the participants are shown in Table 1. The timing of the robot’s behavior was controlled by the operator (Fig. 6).

Experimental sequences. a Greeting. b “Please hold my hand”. c Participant holds robot’s hand. d Robot strokes hand while requesting the task. e “OK, let’s get started”. f Participant starts the task
3.8 Measurements
3.8.1 Objective Measurements
To investigate the touching behavior effects of the robot toward effort facilitation, we measured two items: the number of actions (dragged circles) and the working time (time spent on task)
3.8.2 Subjective measurements
We prepared a questionnaire that addressed the perceived friendliness to measure the subjective impressions of the participants. This measurement consists of one item “I think the robot was friendly.” After the session, participants answered a browser-based questionnaire on a 1-to-7 point scale where 7 is the most positive and 1 is the most negative.

Average number of actions. (** indicates p \(<\).01)

Average working time (** indicates p \(<\) .01)
4 Results
4.1 Verification of Hypotheses 1 and 2
We analyzed the number of actions (Fig. 7) and the amount of working time (Fig. 8). To test our hypotheses, we conducted a one-factor between subjects ANOVA for the number of actions. There was a significant difference among conditions (\(F (2, 30) = 6.30\), \(p =.005\), \(partial \eta ^{2} = 0.30\)). Multiple comparisons with the Scheffe method revealed significant differences: robot’s touching after human’s touching \(>\) human’s touching (\(p =.045\)), robot’s touching after human’s touching \(>\) no touching (\(p=.008\)), but no significant difference between no touching and human’s touching (\(p = .754\)). This means that robot’s touching after human’s touching significantly increased the number of actions; but we note that the statistical power of the results is below 0.80.
We also conducted a one-factor between subjects ANOVA for the amount of working time. There was a significant difference among conditions (F(2, 30) \(=\) 5.84, \(p = .007\), \(partial \eta ^{2} = 0.28\)). Multiple comparisons with the Scheffe method revealed significant differences: robot’s touching after human’s touching \(>\) human’s touching (\(p=.047\)), robot’s touching after human’s touching \(>\) no touching (\(p = .012\)), but no significant differences between no touching and human’s touching (\(p = .832\)). This means that robot’s touching after human’s touching significantly increased the working time; but we note that the statistical power of the results is below 0.80.
These results support hypothesis 2-a and do not support hypotheses 1 and 2-b. Robot’s touching positively affected the facilitation of participant efforts of a simple and monotonous task.
4.2 Verification of Hypothesis 3
We analyzed the number of actions and the amount of working time by conducting a two-factor between subjects ANOVA; the two factors were touch condition and gender (Fig. 10). There were marginal differences between gender (number of actions: \(F(1, 27)=3.80\), \(p=.062\), \(partial \eta ^{2} = 0.12\), working time: \(F(1, 27)=3.97\), \(p=.057\), \(partial \eta ^{2} = 0.13\)), but no interaction effect (number of actions: \(F(2, 27)=.687\), \(p=.512\), working time: \(F(2, 27)=.364\), \(p=.698\)). These results did not clearly support hypothesis 3.
5 Discussion
5.1 Accuracy and Average Time of Tasks
In this section, we discuss how the participants’ detail behaviors in the tasks were changed between conditions. For this purpose, we measured the accuracy of the tasks (i.e., successful ratio of each task) and the average of drag time (i.e., average speed of each task).
Firstly, we analyzed the accuracy of the tasks: no touching is 90.46 % (SD is 0.06), human’s touching is 90.70 % (SD is 0.09), and robot’s touching after human’s touching is 92.12 % (SD is 0.04). We conducted an one-factor between subjects ANOVA for the accuracy rate. There was no significant differences among condition (\(F(2,30) = 0.18, p=0.84, partial \eta ^{2}\)=0.01).
Secondly, we analyzed the average of drag time: no touching is 0.58 sec (SD is 0.10), human’s touching is 0.68 sec (SD is 0.59), and robot’s touching after human’s touching is 0.49 s (SD is 0.05). We also conducted an one-factor between subjects ANOVA for the average drag time. There was no significant differences among condition (\(F(2,30) = 0.80, p=0.46, partial \eta ^{2}=0.05\)).
These results indicate that robot touch did not increase the accuracy and the speed of the tasks. However, in both touch conditions, the participants did more task than no touching condition. These results show that the robot touch would contribute to the participants’ performance toward the tasks; the participants did more tasks without increasing of errors.
5.2 Why Did Robot’s Touching Produce Positive Effects?
Our experimental results showed the positive effects of robot’s touching, which are different trends from several previous research works that reported negative effects of such robot’s touching. Next we clarify why these differences occurred.

Perceived friendliness (\(+\) indicates p \(<\) .1)
In our experiment, our robot first explicitly requested human’s touching to the participants. Since this is one difference from previous research, such requests might reduce the feelings of discomfort of touching rather than the unexpected touching by the robot. The robot’s appearance, which is also different from past research works, might affect the perceptions of people toward it, and robot’s touching might cause positive effects. However, we believe that past research works also used similar policies to set-up their robots, so this might not be the main reason for the differences.
Takemura reported that positive evaluations increased compliance with requests from a person who was touched by other person [8]. We analyzed the perceived friendliness toward the robot (Fig. 9) by conducting a one-factor between subjects ANOVA for it. There was a significant difference among the conditions for perceived friendliness (F(2, 30) \(= 5.12\), \(p=.033\), \(partial \eta ^{2} = 0.20\) ). Multiple comparisons with the Scheffe method revealed marginal differences: robot’s touching after human’s touching \(>\) human’s touching (\(p =.072\)), robot’s touching after human’s touching \(>\) no touching (\(p=.072\)), but there was no significant difference between no touching and human’s touching. The results suggest that robot’s touching increased the friendliness more than human’s touching and no touching. These results are evidence concerning why robot’s touches resulted in positive effects and why human’s touches resulted in negative effects.
These results provide an interesting suggestion that a psychological index is not related to effort facilitation, even though past research suggested that some psychological indexes toward agents are related to such efforts [8, 31]. To solve these contradictory results, physiological measures might aid analysis, e.g., brain waves. This is beyond the focus of this research. But our preliminary research, which is analyzing robot’s touch effects through EEG, analysis, shows that they affect Medial Frontal Negativity, whose amplitude is correlated with feeling of unfairness [32]. Future work will investigate the details of the effects of robot’s touches through physiological measurements.
5.3 Amount and Activity of Touching
In the experiment we employed human’s touch to realize robot’s touch safely; it means that the robot touched more in robot’s touching after human’s touching condition than human’s touching condition. This limitation would make future works about this research work. Here we discussed the differences between conditions how these factors are affected to the effects of touch.
Firstly, the amount of touch is possible factor which have effects to experimental results. As written in above, the amount of touch is different between the conditions, but the types of touches are different. Thus, robot’s touching after human’s touching condition consists of one robot’s touch and one human’s touch, and human’s touching condition consists of one human’s touch only. Amounts of touch between conditions are different, but their types are also different. If we mixed the amount of touch with different touch types on discussion, it would make additional confusions. Therefore, it is difficult to clearly discuss the effects of amount of touch from the experiment results.
Secondly, mutual touch is also one of possible factors for positive effects. Because “robot’s touch after human’s touch” condition realized mutual touch between the robot and the participant, and it showed positive effects than other conditions which not realized mutual touch. However, in our settings, difficult to separate interaction effects between human’s touch and robot’s touch. Therefore, this effect is still unknown from our experimental results.
Another factor would be activeness of touching. Because in this experiment, human’s touch is explicitly requested by the robot, but the robot did not tell any information about robot’s touch before human’s touching. If the robot explicitly tell information about its touch, participants feeling would be changed.
Based on these knowledge coming from our research work, such future works would be interesting to deeply understand the effects of robot touch: (1) the robot or the participants do more physical contact to investigate the effects of amount of robot’s touch, (2) realizing robot’s touch without human’s touch to investigate the effect of type of touch and the mutual touch, (3) the robot explicitly asks participants whether the robot can touch to them would be interesting to investigate the effects of activeness of touch and (4) the robot explicitly asks participants to touch the other robot’s hand (e.g., left hand) to investigate the effects of the amount of human’s touch.
5.4 Effects for Different Kinds of Tasks
In the experiment, we employed a fitts-law based simple and monotonous task. Therefore, it is still questionable about the effects of robot touch for other kinds of tasks, such as more stressful or complex one. To discuss this point, we measured the perceived easiness towards the task by questionnaires to investigate the perceptions of the participants toward the tasks first. In all conditions the average values of this metrics are more than 6 (1-to-7 scale, no significant differences between conditions). We also measured the perceived enjoyment of the tasks in the experiments; the average values of this metrics are less than middle (no significant differences between the conditions, too). These results suggested that the workload of the task was low but not enjoyable; repeating simple and monotonous tasks would be stressful for the participants. We note that the participants in touch conditions did more tasks than no touch condition, even if the tasks would be perceived as not enjoyable; it also would suggest that robot touch has positive effects for stressful tasks.
However, it is still questionable whether robot touch would facilitate other kinds of tasks such as more complex and or difficult (e.g., cognitively demanding) tasks. This question might be interesting because past research works related to social facilitation effects reported that a physical existence increase the performance of simple tasks but decrease the performance of complex tasks. If robot touch has similar trend towards facilitation of complex tasks, the robot touch should be carefully used for facilitation purposes; if robot touch effects are opposite from these trends, the worth of robot touch would increase. This research question is out of scope from this research work, but it would be an interesting future work for social robots.
Moreover, we think that robot touch would have positive effects for collaboration tasks. As written in above, we are trying to analyze touch effects through EEG analysis. In this research work preliminary showed that robot touch would decrease unfairness toward the robot [32]. These effects would be important for collaboration tasks between robots and people.
5.5 Effects for Different Kinds of People
In this section we discuss the effects of robot touch for different kinds of people such as elderly people, because in this paper we conducted with student participants. The different properties of people would make different effects.
Related to this topic, Nomura et al have well investigated the attitude or perceptions for robots between students and other people such as elderly people [33–35]. For example, they investigated the effects of educational backgrounds in human–robot interaction; they found that the students with educational backgrounds of natural science and technology feel more politeness and assertiveness towards the robot than students with a social science background [33]. Other research work reported that elderly people complied with the real robot than students [34]. Moreover, they investigated the differences between elderly people and young people. They reported that elderly people positively evaluated the robot services and feel more friendliness than younger people through a field trial with museum robots [35].
From these research works, we think robot touch would make positive effects towards other people, particularly elderly people. In fact, a use of robot is one of promising applications for elderly therapies; Shibata et al have developed a seal type robot for elderly care through haptic interaction. The robot is already installed for elderly care homes and used for investigating the effects for elderly care [36].
Another future work is to investigate culture differences. Several research works which related to touch interactions with robots are already conducted, but such culture differences are not strongly focused yet. As well known, meaning of touch behaviors is different depending on cultures. Therefore investigating such differences through touch interactions with robots would be one of interesting future works of this research work.
5.6 Gender Effects
Our experimental results showed marginal significant differences of gender effects. The p values exceed 0.05, but we cannot rule out observed gender effects. Our results resemble those from human science literature [18], which shows that males more positively perceive physical contact than females, even if touch style is different.

Average of task performances by gender
Our experimental results also showed different trends of facilitation effects between females and males. The performance of male participants increased in both the human’s/robot’s touching conditions, but the female participants only seemed to be influenced by robot’s touching (Fig. 10). The influences of robot touching seem different between genders. The touching interaction of robots should be designed that facilitates human efforts. For example, a robot could change its touch interaction design depending on the gender of the interaction person.
5.7 Negative Effects
In this section, we discuss whether the robot’s touch has negative effects from our experimental results. One possibility is that participants felt compelled to work more through the robot’s touch. We did not measure such negative effects like a feeling of compelling via questionnaires, but free descriptions of questionnaires did not include such negative impressions toward the robots touch.
We note that the robots touch is designed to constantly pat participants hands during conversation to avoid specific meanings of touch timing or strengths. Because if the robot touches or changes its behaviors by considering of conversational contents, it would have an implied intention to emphasize of requests. For example, if the robot strongly pat or touch a human’s hand when the robot started a request, it would have implicit meaning; in such situation negative effects may occur more.
As a future work, the design of synchronization between such conversational contents and touch timing or behaviors would be important to avoid negative impressions.
5.8 Limitations
Since our experiment was conducted with an existing robot, robovie-mR2, robot generality is limited. We cannot ensure that our findings can be applied to all interactive robots, particularly unhuman-like robots. Its perceived gender of the robot might change the effects of human’s/robot’s touching.
The number of participants are relatively small, students only, and different number of male/female. The values of effect size showed the valid results; but the statistical powers of the results are below 0.80.
6 Conclusion
We focused on the effect of robot’s touching for facilitating human effort. Even though previous research reported the positive effects of haptic interaction in HRI, the effect of touching by a robot to facilitate effort remains unrevealed. To investigate the effect of robot’s touching, we conducted a between-subjects experiment in which a robot requested a participant to perform a simple and monotonous task with robot’s touch, human’s touch, or no touching. Our experimental results indicated that robot’s touching increased the number of actions and the amount of working time with the task, showing its effectiveness for facilitating people’s efforts in human–robot interaction. We believe that this study supports the research and development of a social robot that interacts with people by such haptic interactions as actively touching others.
References
Nakagawa K, Shiomi M, Shinozawa K, Matsumura R, Ishiguro H, Hagita N (2011) Effect of robot’\(s\) active touch on people’\(s\) motivation. In: 6th ACM/IEEE international conference on human–robot interaction (HRI2011), pp 465–472
Aiello JR, Douthitt EA (2001) Social facilitation from triplett to electronic performance monitoring. Group Dyn 5:163–180
Forsyth D (1999) Group dynamics. Brooks/Cole-Wadsworth, New York
Rickenberg R, Reeves B (2000) The effects of animated characters on anxiety, task performance, and evaluations of user interfaces. SIGCHI conference on human factors in computing systems, pp 49–56
Woods S, Dautenhahn K, Kaouri C (2005) Is someone watching me?—consideration of social facilitation effects in human–robot interaction experiments. In: IEEE international symposium on computational intelligence in robotics and automation, pp 53–60
Riether N, Hegel F, Wrede B, Horstmann G (2012) Social facilitation with social robots? In: Proceedings of the seventh annual ACM/IEEE international conference on human–robot interaction, pp 41–47
BURGOON JUDEEK, BULLER DAVIDB, HALE JEROLDL, de TURCK MARKA (1984) Relational messages associated with nonverbal behaviors. Human Commun Res 10(3):351–378
Takemura K (1993) The effect of interpersonal sentiments on behavioral intention of helping behavior among japanese students. J Soc Psychol 133:675–681
Fisher JD, Rytting M, Heslin R (1976) Hands touching hands: affective and evaluative effects of an interpersonal touch. Sociometry 39:416–421
Gueguen N (2002) Touch, awareness of touch, and compliance with a request. Percept Motor Skills 95(2):355–360
Gueguen N, Jacob C, Boulbry G (2007) The effect of touch on compliance with a restaurant’s employee suggestion. Int J Hosp Manag 26(4):1019–1023
Willis F, Smith D, Gier J (1982) Interpersonal touch and compliance with a marketing request. Basic Appl Soc Psychol 3:35–38
Hornik J (1992) Effects of physical contact on customersf shopping time and behavior. Market Lett 3:49–55
Goller M, Kerscher T, Ziegenmeyer M, Ronnau A, Zollner JM, Dillmann R (2009) Haptic control for the interactive behavior operated shopping trolley InBOT. In: Proceedings of the new frontiers in human–robot interaction workshop convention on AISB2009
Onishi M, Luo ZW, Odashima T, Hirano S, Tahara K, Mukai T (2007) Generation of human care behaviors by human-interactive robot ri-man. In: ICRA, pp 3128–3129
Wada Kazuyoshi, Shibata Takanori (2007) Living with seal robots: its sociopsychological and physiological influences on the elderly at a care house. IEEE Trans Robot 23(5):972–980
Shibata T, Tanie K (2001) Physical and affective interaction between human andmental commit robot. In: Proceedings of the 2001 IEEE international conference on robotics & automation, Seoul, Korea. pp 2572–2577. Accessed on 21–26 May 2001
Chaplin WF, Phillips JB, Brown JD, Clanton NR, Stein JL (2000) Handshaking, gender, personality, and first impressions. J Pers Soc Psychol 79:110–117
Nakagawa Kayako, Shiomi Masahiro, Shinozawa Kazuhiko, Matsumura Reo, Ishiguro Hiroshi, Hagita Norihiro (2012) Effect of robot’s whispering behavior on people’s motivation. Int J Soc Robot 4(2):5–16
Salter T, Michaud F, Létourneau D, Lee DC, Werry IP (2007) Using proprioceptive sensors for categorizing human–robot interactions. In: Proceedings of the ACM/IEEE international conference on human–robot interaction, HRI ’07, ACM, New York, pp 105–112
Cooney MD, Becker-Asano C, Kanda T, Alissandrakis A, Ishiguro H (2010) Full-body gesture recognition using inertial sensors for playful interaction with small humanoid robot. In: IROS’10, pp 2276–2282
Dan Stiehl W, Lee JK, Toscano RL, Breazeal C (2008) The design of a semi-autonomous robot avatar for family communication and education. In: IEEE international symposium on robot and human interactive communication (RO-MAN2008), pp 166–173
Cramer H, Kemper N, Amin A, Wielinga B, Evers V (2009) ‘give me a hug’: the effects of touch and autonomy on people’s responses to embodied social agents. Comput Anim Virtual Worlds 20(2–3):437–445
Cramer H, Kemper N, Amin A, Evers V (2009) Touched by robots: effects of physical contact and robot proactiveness. In: Workshop on the Reign of Catz and Dogz in CHI
Chen TL, King C-H, Thomaz AL, Kemp CC (2011) Touched by a robot: an investigation of subjective responses to robot-initiated touch. In: Proceedings of the 6th international conference on human–robot interaction, HRI ’11, ACM, New York, pp 457–464
Kahn PH, Freier NG, Kanda T, Ishiguro H, Ruckert JH, Severson RL, Kane SK (2008) Design patterns for sociality in human–robot interaction. In: Proceedings of the 3rd ACM/IEEE international conference on human robot interaction (HRI2008), pp 97–104
Melson GF, Kahn PH Jr, Beck AM, Friedman B, Roberts T, Garrett E (2005) Robots as dogs?: children’s interactions with the robotic dog aibo and a live australian shepherd. In: CHI ’05: extended abstracts on human factors in computing systems, pp 1649–1652
Kawai H, Toda T, Ni J, Tsuzaki M, Tokuda K (2004) XIMERA: a new TTS from ATR based on corpus-based technologies. In: Proceedings of fifth ISCA workshop on speech synthesis (SSW), pp 179–184
Essick GK, James A, McGlone FP (1999) Psychophysical assessment of the affective components of non-painful touch. Neuroreport 10(10):2083–2087
Heyman J, Ariely D (2004) Effort for payment: a tale of two markets. Am Psychol Soc 15(11):787–793
Fogg BJ (2002) Persuasive technology: using computers to change what we think and do. Morgan Kaufmann
Fukuda H, Shiomi M, Nakagawa K, Ueda K (2012) emidas touchf in human–robot interaction: evidence from event-related potentials during the ultimatum game. In: Proceedings of 7th ACM/IEEE international conference on human–robot interaction, pp 131–132
Nomura T, Takagi S (2011) Exploring effects of educational backgrounds and gender in human–robot interaction. In: Proceedings of the 2nd international conference on user science and engineering, pp 24–29
Nomura T, Sasa M (2009) Investigation of differences on impressions of and behaviors toward real and virtual robots between elder people and university students. In: IEEE 11th international conference on rehabilitation robotics, pp 934–939
Nomura T, Tasaki T, Kanda T, Shiomi M, Ishiguro H, Hagita N (2007) Questionnaire-based social research on opinions of japanese visitors for communication robots at an exhibition. AI Soc 21(1–2):167–183
Shibata Takanori (2011) Importance of physical interaction between human and robot for therapy. HCI 8:437–447
Acknowledgments
This work was supported by JSPS KAKENHI Grant-in-Aid for Young Scientists (A) Number 15H05322.
Author information
Authors and Affiliations
Corresponding author
Additional information
This paper is an extended version of a previous work of Nakagawa et. al. [1] and contains additional experimental results and more detailed discussions.
Rights and permissions
About this article

Cite this article
Shiomi, M., Nakagawa, K., Shinozawa, K. et al. Does A Robot’s Touch Encourage Human Effort?. Int J of Soc Robotics 9, 5–15 (2017). https://doi.org/10.1007/s12369-016-0339-x
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12369-016-0339-x