
Abstract
In this paper, we implemented the functional variable method and the modified Riemann–Liouville derivative for the exact solitary wave solutions and periodic wave solutions of the time-fractional Klein–Gordon equation, and the time-fractional Hirota–Satsuma coupled KdV system. This method is extremely simple but effective for handling nonlinear time-fractional differential equations.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The effort in finding exact solutions of nonlinear equations is very important for understanding most nonlinear physical phenomena. For instance, the nonlinear wave phenomena observed in fluid dynamics, plasma and optical fibres are often modelled by the bell-shaped sech solutions and the kink-shaped tanh solutions. The exact solution [1, 2], if available, of those nonlinear equations facilitates the verification of numerical solvers and aids in the stability analysis of solutions. In the past few years, many new approaches to nonlinear equations were proposed to search for solitary solutions, among which the variational iteration method [3–7], the homotopy perturbation method [8–12], parameter-expansion method [13–15], the variational method [10, 16, 17] and the exp-function method [18–21] have been shown to be effective, easy and accurate for a large class of nonlinear problems. Recently, several powerful methods have also been provided to construct the approximate or exact solutions of fractional ordinary differential equations, integral equations and fractional partial differential equations, such as the Adomian decomposition method [22], the variational iteration method [23], the homotopy analysis method [24, 25], the homotopy perturbation method [26, 27], the Lagrange characteristic method [28], the fractional sub-equation method [29], the first integral method [30], and so on.
In [31], Zerarka et al proposed the so-called functional variable method to solve a wide class of linear and nonlinear wave equations. Right after this pioneer work, this method became popular among the research community, and many studies refining the initial idea for finding exact solutions of some real and complex nonlinear evolution equations have been published [32–35]. The advantage of this method is that one treats nonlinear problems by essentially linear methods, based on which it is easy to construct in full the exact solutions such as soliton-like waves, compacton and noncompacton solutions, trigonometric function solutions, pattern soliton solutions, black solitons or kink solutions, and so on (see [31]). In [36], Jumarie proposed a modified Riemann–Liouville derivative. With this kind of fractional derivative and some useful formulas, one can convert fractional differential equations into integer-order differential equations by variable transformation.
Our objective in this study is to stress the power of the functional variable method and the modified Riemann–Liouville derivative in tackling nonlinear time-fractional differential equations for exact solitary wave solutions, periodic wave solutions and combined formal solutions.
The remainder of this paper is organized as follows. In §2, the functional variable method is described for finding exact solutions of nonlinear time-fractional differential equations. In §3 and §4, this method is illustrated in detail with the time-fractional Klein–Gordon equation, and the time-fractional Hirota–Satsuma coupled KdV system. Finally, some important conclusions are given in §5.
2 The modified Riemann–Liouville derivative and the functional variable method
Jumarie’s modified Riemann–Liouville derivative of order α is defined as
where f:R →R, x →f(x) denote a continuous (but not necessarily differentiable) function. For some properties of the above modified derivative, we refer the reader to [30, 36].
Motivated by the ideas of Lu [30] and Zerarka et al [31], we now describe functional variable method for finding exact solutions of nonlinear time-fractional differential equations as follows.
Let us consider the time-fractional differential equation with independent variables {t,x,y,z, ...} and a dependent variable u
where the subscript denotes partial derivative. Using the variable transformation
where l i and λ are constants to be determined later; the fractional differential equation (2.1) is reduced to an ordinary differential equation (ODE)
Then we make a transformation in which the unknown function U is considered as a functional variable in the form
and some successive derivatives of U are
where ‘′’ stands for d / dU. Substituting (2.4) into (2.2), we reduce the ODE (2.2) in terms of U, F and its derivatives as
The key idea of this particular form (eq. (2.5)) is of special interest because it admits analytical solutions for a large class of nonlinear wave-type equations. After integration, eq. (2.5) provides the expression of F, and this, together with (2.3), give appropriate solutions to the original problem.
To illustrate how the method works, we examine some examples treated by other approaches. This matter is explained in the following sections.
3 Time-fractional Klein–Gordon equation
It is well known that the nonlinear Klein–Gordon equation has many applications in physics. In this section we solve the nonlinear fractional Klein–Gordon equation [37]
For our purpose, we introduce as in [30] the following transformations:
where l, λ is constant.
Substituting (3.2) into eq. (3.1), we know that eq. (3.1) is reduced to an ODE:
or
Then we use the transformation
and (2.4) to convert eq. (3.3) to
or
If a/(λ 2 − l 2) > 0 and c/(λ 2 − l 2) > 0, we get from (3.5) the expression of the function F(U) which reads as
Using transformation (3.4), we have
the solutions of which can be deduced directly from the integral
By setting the constants of integration to zero, we can obtain the result from (3.6) as
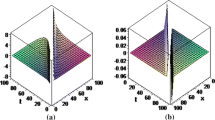
So, we get the following hyperbolic solution of the time-fractional Klein–Gordon equation
If a/(λ 2 − l 2) > 0 and c/(λ 2 − l 2) < 0, we can work similarly as the first case and use instead the integral
to get the hyperbolic solution of the time-fractional Klein–Gordon equation
If a/(λ 2 − l 2) < 0 and c/(λ 2 − l 2) > 0, we can work similarly as the first case and use instead the integral
to get the periodic solution of the time-fractional Klein–Gordon equation
If a/(λ 2 − l 2) < 0 and c/(λ 2 − l 2) < 0, we can work similarly as the first case to get the periodic solution of the time-fractional Klein–Gordon equation
Comparing our results with Golmankhaneh’s results [37] and Lu’s results [30], it can be seen that our solutions are new.
4 Time-fractional Hirota–Satsuma coupled KdV system
The Hirota–Satsuma system of equations was introduced to describe the interaction of two long waves with different dispersion relations. In this section, we consider the solution of generalized Hirota–Satsuma coupled KdV of time-fractional order [38, 39], which is presented by a system of nonlinear partial differential equations, of the form:
where u = u(x,t), v = v(x,t) and w = w(x,t).
For our purpose, we introduce the following transformations as in [30]:
where λ is a constant.
Substituting (4.2) into eqs (4.1), we can see that eqs (4.1) are reduced into an ODE
or
Then we use the transformation
and (2.4) to convert eq. (4.3) to
or
If λ > 0, we get from (4.5) the expression of the function F(U) which reads as
Using transformation (3.4), we have
the solutions of which can be deduced directly from the integral
By setting the constants of integration to zero, we can obtain from (4.6) the result
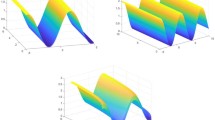
So, we get the following hyperbolic solution of the time-fractional Hirota–Satsuma coupled KdV system:
If λ < 0, we can work similarly as the first case and use instead the integral
to get the periodic solution of the time-fractional Hirota–Satsuma coupled KdV system
Comparing our results with the results of [38, 39] and Lu’s results [30], it can be seen that our solutions are new.
5 Conclusion
The functional variable method and the modified Riemann–Liouville derivative are applied successfully for solving the time-fractional Klein–Gordon equation and the time-fractional Hirota–Satsuma coupled KdV system. The performance of this method is reliable and effective and gives the exact solitary wave solutions and periodic wave solutions. This method has more advantages: it is direct and concise. Thus, we deduce that the proposed method can be extended to solve many systems of nonlinear time-fractional partial differential equations.
References
L Debtnath, Nonlinear partial differential equations for scientists and engineers (Birkhäuser, Boston, 1997)
A M Wazwaz, Partial differential equations methods and applications (Balkema, Rotterdam, 2002)
E Yusufoglu, Int. J. Nonlin. Sci. Numer. Simulat. 8, 153 (2007)
J H He and X H Wu, Comput. Math. Appl. 54, 881 (2007)
J H He, J. Comput. Appl. Math. 207, 3 (2007)
L-F Shi and J-Q Mo, Acta Phys. Sin. 62(4), 040203 (2013)
L Xu, Comput. Math. Appl. 54, 1071 (2007)
L Xu, Comput. Math. Appl. 54, 1067 (2007)
J H He, Int. J. Mod. Phys. B 20, 2561 (2006)
J H He, Int. J. Mod. Phys. B 20, 1141 (2006)
J H He, Phys. Lett. A 350, 87 (2006)
A Sadighi and D D Ganji, Int. J. Nonlin. Sci. Numer. Simulat. 8, 435 (2007)
S Q Wang and J H He, Chaos, Solitons and Fractals 35, 688 (2008)
L Xu, Phys. Lett. A 368, 259 (2007)
Z-L Tao, Chaos, Solitons and Fractals 41(2), 642 (2009)
Z-L Tao, Comput. Math. Appl. 58(11–12), 2395 (2009)
X-W Zhou and L Wang, Comput. Math. Appl. 61, 2035 (2011)
J H He, Chaos, Solitons and Fractals 30, 700 (2006)
X H Wu and J H He, Comput. Math. Appl. 54(7–8), 966 (2007)
S D Zhu, Int. J. Nonlin. Sci. Numer. Simulat. 8(3), 461 (2007)
Y-P Wang and D-F Xia, Comput. Math. Appl. 58(11–12), 2300 (2009)
A M A El-Sayed, S Z Rida and A A M Arafa, Commun. Theor. Phys. (Beijing) 52, 992 (2009)
M Inc, J. Math. Anal. Appl. 345, 476 (2008)
M M Rashidi, G Domairry, A Doosthosseini and S Dinarvand, Int. J. Math. Anal. 12, 581 (2008)
L N Song and H Q Zhang, Chaos, Solitons and Fractals 40, 1616 (2009)
Z Z Ganji, D D Ganji, A D Ganji and M Rostamian, Numer. Methods Partial Differential Equations 26, 117 (2010)
P K Gupta and M Singh, Comput. Math. Appl. 61, 50 (2011)
G Jumarie, Appl. Math. Lett. 19, 873 (t)
S Zhang and H Q Zhang, Phys. Lett. A 375, 1069 (2011)
B Lu, J. Math. Anal. Appl. 395, 684 (2012)
A Zerarka, S Ouamane and A Attaf, Appl. Math. Comput. 217, 2897 (2010)
A Zerarka, S Ouamane and A Attaf, Wav es in Random and Complex Media 21, 44 (2011)
A Zerarka and S Ouamane, World J. Modeling and Simulation 6, 150 (2010)
A Bekir and S San, J. Mod. Math. Frontier 1, 5 (2012)
A C Çevikel, A Bekir, M Akar and S San, Pramana – J. Phys. 79, 337 (2012)
G Jumarie, Comput. Math. Appl. 51, 1367 (2006)
A K Golmankhaneh and D Baleanu, Signal Process. 91, 446 (2011)
Z Z Ganji, D D Ganji and Y Rostamiyan, Appl. Math. Model. 33, 3107 (2009)
M Shateri and D D Ganji, Int. J. Differ. Eq. 2010 (2010), For details, see http://www.hindawi.com/journals/ijde/2010/954674
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
LIU, W., CHEN, K. The functional variable method for finding exact solutions of some nonlinear time-fractional differential equations. Pramana - J Phys 81, 377–384 (2013). https://doi.org/10.1007/s12043-013-0583-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12043-013-0583-7
Keywords
- Exact solutions
- functional variable method
- time-fractional Klein–Gordon equation
- time-fractional Hirota–Satsuma coupled KdV system
- nonlinear time-fractional differential equations