
Abstract
In this paper we analyse stability of nonlinear fractional order delay differential equations of the form \(D^{\alpha} y(t) = a f\left(y(t-\tau)\right) - b y(t)\), where D α is a Caputo fractional derivative of order 0 < α ≤ 1. We describe stability regions using critical curves. To explain the proposed theory, we discuss fractional order logistic equation with delay.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Fractional delay differential equations (FDDE) are dynamical systems involving non-integer order derivatives as well as time delays. These equations have found many applications in control theory [1, 2], agriculture [3, 4], chaos [5–9], bioengineering [10, 11] and so on.
Due to its non-local nature, fractional derivative [12–15] is capable of modelling memory and hereditary properties. The time-delay [16] in the model also has similar properties. Hence, the models containing fractional derivative as well as time delay are crucial.
The stability of linear time invariant fractional delay systems (LTIFDS) has been studied by many researchers. Hotzel [17] gave stability conditions for LTIFDS with characteristic equation (as α + b) + (cs α + d)e − ρs = 0. Chen and Moore [18] used Lambert function to study the stability of LTIFDS \(\dot{y}(t)=ay(t-1)\). This equation is generalized by Deng et al [19]. They have used Laplace transform to find characteristic equation for n-dimensional LTIFDS. Lazarevic and Debeljkovic [20] discussed finite time stability of LTIFDS. A numerical algorithm was proposed by Hwang and Cheng [21] to study the bounded input and bounded output (BIBO) stability of LTIFDS. Analysis of robust BIBO stability of LTIFDS in the presence of real parametric uncertainties is discussed by Moorani and Haeri in [22]. Graphical test is used by Yu and Wang [23] to study BIBO interval stability tests of such systems. Hamamci [24] used fractional order PI λ D μ controller to stabilize LTIFDS.
The stability of nonlinear delay differential equations of fractional order have not been reported much. In this article, we use the method of critical curves [16, 25] to study the stability of a class of nonlinear FDDEs: \(D^{\alpha} y(t) = a f\left(y(t-\tau)\right) - b y(t)\), where D α is a Caputo fractional derivative of order 0 < α ≤ 1. We discuss the chaos in fractional order logistic equation using the developed theory.
2 Preliminaries
Let us start with some definitions [12, 13, 26].
Definition 2.1
A real function f(t), t > 0 is said to be in space \(C_\alpha,\, \alpha \in \Re\) if there exists a real number p (> α), such that \(f(t)= t^pf_1(t)\) where f 1(t) ∈ C[0, ∞ ).
Definition 2.2
A real function f(t), t > 0 is said to be in space \(C_{\alpha}^{m}, \, m\in {\rm I}\!{\rm N} \bigcup \left\{0\right\}\) if \(f^{(m)} \in C_\alpha.\)
Definition 2.3
Let f ∈ C α and α ≥ − 1, then the (left-sided) Riemann–Liouville integral of order μ, μ > 0 is given by
Definition 2.4
The (left-sided) Caputo fractional derivative of f, \(f\in C_{-1}^{m}, m\in {\rm I}\!{\rm N} \bigcup \left\{0\right\},\) is defined as
Note that for m − 1 < μ ≤ m, m ∈ IN,
3 Main results
Consider the fractional order delay differential equation (FDDE) of the form
An equilibrium point y * of eq. (5) satisfies the equation
Let ξ = y − y * be a small perturbation from an equilibrium point and y τ = y(t − τ), ξ τ = ξ(t − τ). Then using Taylor’s expansion of f about y * and eq. (6), we get
Equation (7) is called as a linearized equation for system (5) [25, 27]. The trajectories of the nonlinear system in the neighbourhood of an equilibrium point have the same form as the trajectories of linearized system.
Using Laplace transform [19], eq. (7) yields a characteristic equation
An equilibrium point y * is asymptotically stable if all the roots λ i of characteristic equation (8) satisfy
Let \(\lambda= u+\imath v\), \(u, v\in \Re\). A change in stability can occur only when the value of λ crosses the imaginary axis at \(\lambda= \imath v\) and the characteristic equation becomes
Using \(\imath v=v\,\mathrm{exp}(\imath \pi/2)\), \( v\in \Re\) and separating real and imaginary parts in (10) we get
Squaring and adding
This gives
Also, from (11)
Thus, we get critical surfaces
In eq. (14) we can take minus sign as well, but we get the same surfaces as in eqs (16) and (17) because the delay τ in our analysis is always positive. There are similar critical curves below the a = 0 axis corresponding to the negative values of τ, which are not of our interest.
Theorem 3.1
There is only one stability region for y * between the plane τ = 0 in the (a,b) parameter space and the closest critical surface τ(0) in the (τ,a,b) parameter space.
Proof
For \(|af'\left(y^*\right)|>b\) and for a fixed v > 0, the stability regions are confined between a set of two surfaces τ 1(n) and τ 2(n) in the (τ, a, b) parameter space if du/dτ on any of these surfaces is negative and on other it is positive.
Differentiating characteristic eq. (8) with respect to τ, we get
On critical surfaces (16) and (17),
Since 0 < α < 1, v > 0 and b > 0, we have
Hence, from eq. (20) (du/dτ) > 0 on each of the critical surfaces τ 1(n) and τ 2(n). This implies that there does not exist any eigenvalue with negative real part across the critical surfaces (16) and (17). Also, the equilibrium point is stable for τ = 0 when af′(y *) − b < 0. Thus, there is only one stability region enclosed by τ = 0 and the critical surface τ(0), closest to it.
4 Illustrative example
We illustrate the proposed results using fractional order logistic equation with delay [5]
The system (22) shows chaotic behaviour for certain parameters τ, a and b. As the instability of equilibrium points is a necessary condition of chaos, we discuss these conditions using our theory. We use a predictor–corrector scheme developed in [28] for simulations.
Equilibrium points of the system (22) are given by \(y_1^*=(a-b)/a\) and \(y_2^*=0\).
-
Stability of \(y_1^*\):
Substituting f(y) = y(1 − y) in eqs (16) and (17) we get critical surfaces
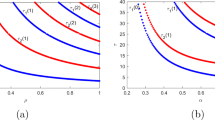
$$ \begin{array}{rll} && \tau_1(n) = \dfrac{2n \pi +\arccos\!\left(\dfrac{b+\left(-b \cos\!\left({\alpha \pi}/{2}\right)+\sqrt{-b^2 \sin^2\left({\alpha \pi}/{2}\right)+(2b-a)^2} \right)\cos({\alpha \pi}/{2})}{a}\right)}{\left( -b \cos\!\left({\alpha \pi}/{2}\right)+\sqrt{-b^2 \sin^2\left({\alpha \pi}/{2}\right)+(2b-a)^2}\right)^{1/\alpha}},\\ &&\qquad\qquad\qquad n=0,1,\ldots \end{array} $$(23)$$ \begin{array}{rll} &&\tau_2(n) = \dfrac{2n \pi -\arccos\!\left(\dfrac{b+\left(-b \cos\!\left({\alpha \pi}/{2}\right)+\sqrt{-b^2 \sin^2\left({\alpha \pi}/{2}\right)+(2b-a)^2} \right)\cos({\alpha \pi}/{2})}{a}\right)}{\left( -b \cos\!\left({\alpha \pi}/{2}\right)+\sqrt{-b^2 \sin^2\left({\alpha \pi}/{2}\right)+(2b-a)^2}\right)^{1/\alpha}},\nonumber\\[28pt] &&\qquad\qquad\qquad n=1,2,\ldots . \end{array} $$(24)Figure 1 shows critical curves τ 1(0), τ 1(1), τ 1(2) (solid lines) and τ 2(1), τ 2(2), τ 2(3)(dashed lines) respectively for α = 0.9 and b = 26.
-
Stability of \(y_2^*\):
Critical surfaces, in this case are given
$$ \begin{array}{rll} &&\tau_1(n)=\dfrac{2n \pi +\arccos\!\left(\dfrac{b+\left(-b \cos\!\left({\alpha \pi}/{2}\right)+\sqrt{-b^2 \sin^2\!\left({\alpha \pi}/{2}\right)+a^2} \right)\cos({\alpha \pi}/{2})}{a}\right)}{\left( -b \cos\!\left({\alpha \pi}/{2}\right)+\sqrt{-b^2 \sin^2\!\left({\alpha \pi}/{2}\right)+a^2}\right)^{1/\alpha}}, \\ &&\qquad\qquad\qquad n=0,1,\ldots \end{array} $$(25)$$ \begin{array}{rll} &&\tau_2(n) = \dfrac{2n \pi -\arccos\!\left(\dfrac{b+\left(-b \cos\!\left({\alpha \pi}/{2}\right)+\sqrt{-b^2 \sin^2\!\left({\alpha \pi}/{2}\right)+a^2} \right)\cos({\alpha \pi}/{2})}{a}\right)}{\left( -b \cos\!\left({\alpha \pi}/{2}\right)+\sqrt{-b^2 \sin^2\!\left({\alpha \pi}/{2}\right)+a^2}\right)^{1/\alpha}},\\ &&\qquad\qquad\qquad n=1,2,\ldots. \end{array} $$(26)The critical curves τ 1(0), τ 1(1), τ 1(2) and τ 2(1), τ 2(2), τ 2(3) are plotted in figure 2 for α = 0.9.
-
Chaos in system (22):
Chaos exists in system (22) only when the equilibrium points are unstable. Figure 3 shows stable behaviour of the system for parameters τ = 0.5, a = 70, b = 26, α = 0.9 which are in the stable region. If we consider the parameters (τ, a, b, α) = (0.5, 79.3, 26, 0.9) which are on the boundary of the stable region for \(y_1^*\) then system shows periodic oscillations as shown in figure 4. Now consider the point (τ, a, b, α) = (0.5, 104, 26, 0.9) in unstable region. It can be observed from figure 5 that the system is chaotic in this case.

Critical curves for \(y_1^*=(a-b)/a\), b = 26.

Critical curves for \(y_2^*=0\), b = 26.

(a) Stable phase portrait and (b) converging time series.

(a) Periodic limit cycle and (b) periodic time series.

(a) Chaotic attractor and (b) chaotic time series.
5 Conclusion
We have studied the stability of a class of nonlinear FDDEs of the form \(D^{\alpha} y(t) = a f\left(y(t-\tau)\right) - b y(t)\), where D α is a Caputo fractional derivative of order 0 < α ≤ 1. Explicit expressions for determining stability of critical surfaces are given. The theory developed is applied for studying chaos in fractional order logistic equation. It is observed that the system is chaotic only if the parameters are in the unstable region.
References
A Si-Ammour, S Djennoune and M Bettayeb, Commun. Nonlinear Sci. Numer. Simul. 14, 2310 (2009)
C A Monje, Y Q Chen, B M Vinagre, D Y Xue and V Feliu, Fractional-order systems and controls: Fundamentals and applications (Springer-Verlag, London, 2010)
V Feliu, R Rivas and F Castillo, Comput. Electron. Agric. 69(2), 185 (2009)
V Feliu, R Rivas and F J Castillo, Fractional robust control to delay changes in main irrigation canals, Proceedings of the 16th International Federation of Automatic Control World Congress (Prague, Czech Republic, 2005)
D Wang and J Yu, J. Electronic Sci. Tech. of China 6(3), 225 (2008)
J G Lu, Chin. Phys. 15(2), 301 (2006)
S Bhalekar and V Daftardar-Gejji, Commun. Nonlinear Sci. Numer. Simul. 15(8), 2178 (2010)
V Daftardar-Gejji, S Bhalekar and P Gade, Pramana – J. Phys. 79(1), 61 (2012)
S Bhalekar, Signals, Image and Video Processing 6(3), 513 (2012)
S Bhalekar, V Daftardar-Gejji, D Baleanu and R Magin, Comput. Math. Appl. 61, 1355 (2011)
S Bhalekar, V Daftardar-Gejji, D Baleanu and R Magin, Int. J. Bifurcation Chaos 22(4), 1250071 (2012), DOI: 10.1142/S021812741250071X
I Podlubny, Fractional differential equations (Academic Press, San Diego, 1999)
S G Samko, A A Kilbas and O I Marichev, Fractional integrals and derivatives: Theory and applications (Gordon and Breach, Yverdon, 1993)
A A Kilbas, H M Srivastava and J J Trujillo, Theory and applications of fractional differential equations (Elsevier, Amsterdam, 2006)
R L Magin, Fractional calculus in bioengineering (Begll House Publishers, USA, 2006)
H Smith, An introduction to delay differential equations with applications to the life sciences (Springer, New York, 2010)
R Hotzel, J. Math. Sys. 8(4), 1 (1998)
Y Chen and K L Moore, Nonlinear Dyn. 29, 191 (2002)
W Deng, C Li and J Lü, Nonlinear Dyn. 48, 409 (2007)
M Lazarevic and D Debeljkovic, Asian J. Control 7(4), 440 (2005)
C Hwang and Y C Cheng, Automatica 42, 825 (2006)
K Moornani and M Haeri, Automatica 46, 362 (2010)
Y J Yu and Z H Wang, Comput. Math. Appl. 62(3), 1501 (2011)
S E Hamamci, IEEE Trans. Automatic Control 52, 1964 (2007)
M Lakshmanan and D V Senthilkumar, Dynamics of nonlinear time-delay systems (Springer, Heidelberg, 2010)
Y Luchko and R Gorenflo, Acta Math. Vietnamica 24, 207 (1999)
Z Vukic, L Kuljaca, D Donlagic and S Tesnjak, Nonlinear control systems (Marcel Dekker Inc, New York, 2003)
S Bhalekar and V Daftardar-Gejji, J. Fract. Calc. Appl. 1(5), 1 (2011)
Acknowledgements
Author is grateful to the anonymous referee for the insightful comments leading to the improvement of the paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
BHALEKAR, S.B. Stability analysis of a class of fractional delay differential equations. Pramana - J Phys 81, 215–224 (2013). https://doi.org/10.1007/s12043-013-0569-5
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12043-013-0569-5