
Abstract
On 28th September 2015, India launched its first astronomical space observatory AstroSat, successfully. AstroSat carried five astronomy payloads, namely, (i) Cadmium Zinc Telluride Imager (CZTI), (ii) Large Area X-ray Proportional Counter (LAXPC), (iii) Soft X-ray Telescope (SXT), (iv) Ultra Violet Imaging Telescope (UVIT) and (v) Scanning Sky Monitor (SSM) and therefore, has the capability to observe celestial objects in multi-wavelength. Four of the payloads are co-aligned along the positive roll axis of the spacecraft and the remaining one is placed along the positive yaw axis direction. All the payloads are sensitive to bright objects and specifically, require avoiding bright Sun within a safe zone of their bore axes in orbit. Further, there are other operational constraints both from spacecraft side and payloads side which are to be strictly enforced during operations. Even on-orbit spacecraft manoeuvres are constrained to about two of the axes in order to avoid bright Sun within this safe zone and a special constrained manoeuvre is exercised during manoeuvres. The planning and scheduling of the payloads during the Performance Verification (PV) phase was carried out in semi-autonomous/manual mode and a complete automation is exercised for normal phase/Guaranteed Time Observation (GuTO) operations. The process is found to be labour intensive and several operational software tools, encompassing spacecraft sub-systems, on-orbit, domain and environmental constraints, were built-in and interacted with the scheduling tool for appropriate decision-making and science scheduling. The procedural details of the complex scheduling of a multi-wavelength astronomy space observatory and their working in PV phase and in normal/GuTO phases are presented in this paper.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The AstroSat is an astronomical observatory for studies of cosmic sources. It carries a complement of instruments sensitive over a wide spectral region covering visible (350–600 nm), ultraviolet (UV in 120–300 nm), soft X-rays (0.3–10 keV) and hard X-ray (10–100 keV) bands. Thus the satellite enables multi-wavelength observations of a variety of celestial objects in the different spectral bands at the same time. This is achieved by flying four instruments sensitive in the X-ray band and one instrument with two telescopes covering the UV and visible bands. The four X-ray astronomy instruments are: (1) three identical Large Area X-ray Proportional Counters (LAXPC) covering 3–80 keV region, (2) a Cadmium-Zinc-Telluride (CZT) array with coded mask aperture sensitive in 10–100 keV, (3) a Soft X-ray Imaging Telescope (SXT) using X-ray reflecting mirrors and X-ray CCD for imaging and spectral studies in 0.3–8 keV and (4) a Scanning Sky Monitor (SSM) for detection and monitoring of new and known X-ray sources in 2–10 keV region. The UV and visible bands are covered by an Ultra Violet Imaging Telescope (UVIT) consisting of two identical telescopes, one covering the Far UV (FUV) band (130–180 nm) and the second sensitive in Near UV (NUV) (180–300 nm) and visible bands covering (350–600 nm).
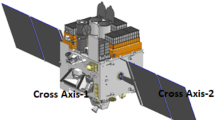
All payloads except SSM in the spacecraft are mounted and co-aligned in such a way that their Centre of Field-of-View (CFoV) is pointed along the positive roll axis of the spacecraft. While observing a source in the inertial frame, this axis must be pointed towards the source and maintained in this orientation as long as the payload is required to look in this direction. The satellite is thus an inertial pointing satellite and therefore, for restricting the movement of the Sun in the spacecraft frame and also for maximizing power, the pitch axis needs to be made perpendicular to the Sun. The solar panels which are the source of power are mounted along the pitch axis and this allows solar panels to be rotated such that solar panels are perpendicular to the Sun for any orientation. The above two requirements inherently force that the pitch axis needs to be perpendicular to both the source and the Sun. Therefore, the positive pitch axis is defined as the cross product between source vector and sun vector. The cross product between the source and the pitch axis provides the positive yaw axis. Note that this arrangement requires the Sun in the roll–yaw plane in the defined inertial frame. The SSM is mounted along the positive yaw axis and the UV payload cover lids are opened towards the negative yaw axis. Therefore, in order to avoid the Sun in the FoV’s of both SSM and UVIT, it is expected that the Sun be always in the defined negative yaw hemisphere. In order to satisfy this constraint, the positive yaw is redefined by suitably altering the cross products of source and sun vector in such a way that the positive yaw axis always makes an obtuse angle with respect to the Sun.
AstroSat is a 3-axis stabilized satellite. The satellite is a zero-momentum biased system with 4 reaction wheels as actuators for momentum transfer and control. Apart from this, the satellite carries reaction control thrusters but mainly for orbit rising in case of necessity. The sensors for measuring attitude are star sensors, gyroscopes, \(4{\uppi }\) Sun sensors and magnetometers. Magneto-torquers are employed for dumping momentum continuously. Two of the Phased Array Antenna (PAA) is mounted along the positive and negative yaw axis for data download and two Spacecraft Positioning System (SPS) receivers for navigation purposes along the negative yaw direction are mounted for data transmission and timing and orbit knowledge purposes, respectively.
AstroSat is placed in 650 km altitude and 6-degree inclined orbit. In normal phase, the spacecraft is tracked only by Bengaluru station and the minimum and maximum visible period is about 5–12 min, respectively for 14–15 orbits in a day. However, the spacecraft is not in radio contact for one orbit in a day due to low inclination nature of the orbit selected. The entire payload data collection is through Solid State Recorder (SSR) and there is no real time data capability available for payload operations. Nominally, it is not envisaged to have orbit raise manoeuvres for regular orbit maintenance; nevertheless, eight 11N reaction control thrusters and 42 kg of fuel have been carried for contingency purposes. Also, AstroSat being an inertial satellite, magneto-torquers can become ineffective for certain inertial orientation, and in such instances, thrusters are planned for momentum dumping to avoid attitude losses. In addition, when large orientation manoeuvres are required for quick turn-around time, these thrusters are envisaged for attitude control if momentum capability of reaction wheels becomes insufficient. An additional constraint that was required in AstroSat was to avoid the Sun in the bore axis zone of instruments mounted about both positive roll and positive yaw axis while manoeuvring from one source to another in the orbit.
Efficient mission operations for astronomy missions require complete understanding of payloads and their sensitivities along with operational constraints; this greatly helps in the proper planning of mission operations. Nevertheless, there always occur surprises in on-orbit performance of the payloads and thus the planning needs to have the flexibility to accommodate the corrective new procedures. In the past, several astronomical missions (Brissenden 2001; Fuerst et al. 2012; Much et al. 2003; Ong and Rackley 2002) from across the world have evolved procedures for scheduling and planning of X-ray, spectroscopic and UV instruments. Though the procedures evolved are mission specific, they can be taken as guidelines for a new mission like ‘AstroSat’ which has both X-ray and UV instruments onboard. Architecture of ground segment and science operation centre for an astronomy mission ‘INTEGRAL’ is elaborated in Much et al. (2003) and AstroSat has a similar architecture evolved and implemented. Damage observed in the payload instrument resolution during radiation belt crossings and thus performance degradation during the initial phase in CHANDRA was handled by the mission operations team by modifying the operational procedures which were reported in Brissenden (2001). The key mission operation challenges for autonomous operations of SWIFT mission, planning and scheduling of payloads and target of opportunity commanding aspects were presented in Ong and Rackley (2002). The calibration exercises of NuSTAR instruments and science goals are elaborated by Fuerst et al. (2012). Based on the knowledge gained from past missions, the ground and space segment of AstroSat was driven to minimize the work load on ground support personnel and therefore many autonomy features were built on orbit and ground software packages. Though it was impossible to automate completely, efforts were directed towards the goal that once initiated, the entire operation should be handled automatically on-orbit. Ideas from scheduling operations of XMM (Palmar et al. ) and various autonomy features for space-based observatories described in Muscettola et al. (1995) have been absorbed and implemented for AstroSat mission. To collect advance information on celestial targets of interest for operations, an internet-based software tool for proposals of targets and instrument configuration submission in the lines of XMM mission (Dahlem 1998; Lumb 1998) is also planned for AstroSat.
The scheduling of instruments of AstroSat has become a very complex process; the payloads being very sensitive, are to meet several on-orbit angle constraints viz., with respect to bright celestial objects such as the Sun, Moon and planets of the solar system etc., restrictions on RAM angle defined as the angle between the payload axis to the velocity vector direction of the spacecraft, minimum Earth Albedo angle and avoidance of bright stars in their Field-of-View (FoV) of UVIT. Besides, the UVIT is expected to operate only during orbit night (or eclipse), and in case there are bright stars that cause problem in the UVIT, that source should be precluded while planning and if possible, schedule the observation later. Since majority of the instruments have high voltage devices, they are triggered to operate in lower energy state over the region of South Atlantic Anomaly (SAA). Other factors such as durations of Earth occultation, orbit eclipse, station visibility and PAA contact are all important factors in the efficient scheduling of a celestial source and they play a major role in optimizing the observation efficiency in-orbit. In the following, the working of several ‘planning tools’, the assistance of flight dynamic packages, the functioning of scheduling and command generating software packages that were part of ‘optimal scheduling’ of celestial targets for AstroSat, are elaborated. The adequacy/inadequacy of the evolved procedures in the ’performance verification’ and ‘normal’ phase cycles which were extended for over six months each, respectively is presented.
2 AstroSat on-orbit geometry and other payload constraints
2.1 Pointing orientation and observation in space
The preferred orientation of the spacecraft in space for celestial observation by payloads require the positive roll side of the satellite to be pointed towards the required celestial object with the constraint that the positive yaw axis should also be pointing away from the Sun. Since all the payloads are co-mounted along the positive roll axis, the unit direction along the source must be taken as the positive roll axis, say R. The unit orientation of the Sun S for a given time is computed using the standard polynomial coefficients. If pitch axis P is designated as
the solar panels mounted along both sides of the pitch axis gets maximum power. Thus maximum power for that orientation is assured. Now the yaw axis is formed by an orthogonal triad with P and R as two of the axes and is constructed as \(Y=R \times P\). Also it is desired by some payloads having ‘deployed lids’ that the Sun may be positioned behind the lids so that sunlight does not reflect into the payload telescopes. In order to ascertain this constraint, verification of the Sun angle between yaw axis and the Sun direction is carried out. When the Sun angle between the yaw axis Y and the Sun direction S is more than \(90{^{\circ }}\), the pitch axis is redefined by

AstroSat spacecraft axes definition in space. Note that the Sun angle constraint with respect to +roll axis is \(\uptheta \ge 45{^{\circ }}\).
Thus the above defined axes in space satisfy constraints due to the power requirement of the satellite and also meet inertial orientation constraint of a large FoV SSM payload due to the Sun. The transformation matrix or the equivalent quaternion Q is computed as explained below:
Let yaw axis \(\hat{{Y}}\) be represented by a unit vector with components \(Y_{1}\), \(Y_{2}\) and \(Y_{3}\), roll axis \(\hat{{R}}\) be represented by a unit vector with components \(R_{1}\), \(R_{2}\) and \(R_{3}\) and pitch axis \(\hat{{P}}\) be represented by a unit vector with components \(P_{1}\), \(P_{2}\) and \(P_{3}\). Then the following direction cosine matrix relation provides the co-ordinate transformation between the body axis \([ {\hat{{Y}}\quad \hat{{R}}\quad \hat{{P}}} ]\) to the inertial axis \(\left[ {Y_I}\quad {R_I} \quad {P_I}\right] \):
The above transformation matrix is usually represented by the inertial quaternion \(Q=Q_{1}\), \(Q_{2}\), \(Q_{3}\) and \(Q_{4}\) in the Earth Centred Inertial (ECI) frame. Figures 1(a) and 1(b) provide details of the general orientation of AstroSat in space.
2.2 Additional payload constraints in orientation
It is broadly decided based on astronomy missions of the past and from internal studies that the payloads of AstroSat should adhere to various other constraints for its efficient operations in orbit while observing the celestial source. In addition to orientation constraint defined in section 2.1, the following additional constraints are also satisfied for payload observations on orbit:
-
(a)
Normally the Sun avoidance angle is \(\ge \)45\({^{\circ }}\). However, for some very important and unique transient X-ray sources, a maximum of 100 hours of useful observation can be made every year between the Sun angles of \(30{^{\circ }}\) and \(45{^{\circ }}\).
-
(b)
Avoidance of the Sun is required even when the spacecraft is maneuvering from one source to another and in that case, apart from positive roll axis, the positive yaw axis which carries another wide FoV payload SSM should also avoid the Sun.
-
(c)
The RAM angle avoidance may be the same as the opening angle of the UVIT baffle tube, which is approximately 10–12\({^{\circ }}\). Therefore the RAM angle is decided as \(\ge \)12\({^{\circ }}\).
-
(d)
All instruments, except UVIT have no constraint about a direct view of the Earth’s Albedo. Avoidance of bright Earth’s limb for UVIT is \(\ge \)12\({^{\circ }}\).
-
(e)
Avoidance of Moon disc specified is \(\ge \)10\({^{\circ }}\).
In order to support the decision making of selection of viewable celestial sources that satisfy the above constraints, a software tool has been built to aid proposers of AstroSat and is made public for use. The viewing tool is called ‘ASTROVIEWER’ (Nagamani et al. 2010) and is available to any astronomer who is registered with Indian Space Science Data Centre (ISSDC) and wish to submit proposals to observe through instruments of AstroSat.
However, during the first few months of operations of AstroSat, celestial objects which were far away from the Sun (>90\({^{\circ }})\) only were selected and observed. When +roll was brought closer to the Sun by \(50{^{\circ }}\), the drift of gyroscopes and outputs of \(4{\uppi }\) Sun sensors were showing some anomalous behaviour affecting pointing accuracy and therefore, as of now the Sun angle constraint is decided to be \(\ge \)65\({^{\circ }}\). Obviously, this large Sun angle selection reduces the observable regions of celestial sky closer to the Sun for that season; however, the targets in this region may be scheduled in other seasons. Also it is to be noted that, by nature of the inclination of orbit selected, RAM angle constraint directly affects the selection of low declination sources around the equatorial belt.
2.3 Payload operations over SAA region
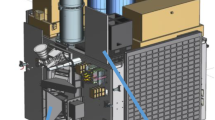
Apart from the above geometrical constraints, the payloads are brought suitably to a lower energy state whenever they are over the South Atlantic Anomaly (SAA) regions. For the selected orbit of 650 km altitude, the SAA region is computed and is as shown in Fig. 2(a) and 2(b). In order to take care of the SAA region, two options have been built on the spacecraft viz. (i) using Charge Particle Monitor (CPM), a hardware-based detection of entry and exit of the SAA region and (ii) ground software- based trigger of SAA entry/exit based on a ‘tuned SAA boundary model’ defined in flight dynamics module. The longitude and latitude range for the tuned model is clearly indicated in Fig. 2(c) which was derived using the LAXPC payload output. The ground software option was built to overcome sudden failure of the CPM hardware over long operational periods of 5 years and at those times, the software-based model takes care of the safe trigger of payloads. Therefore, onboard decision for this selection is taken based on the ‘and/or’ logic with a payload sequencer and the option is suitably modified as and when required.

(a) South Atlantic Anomaly region and (b) for \(6{^{\circ }}\) inclined, 650 km orbit, (c) triangular (red within black) region of SAA implemented in the planning tool. Courtesy: Space Astronomy Group, ISAC, Bengaluru and Prof. J. S. Yadav and team, TIFR Bombay.
2.4 Spacecraft pointing ‘source to source’ manoeuvres avoiding the Sun
Among the payloads of AstroSat, UVIT is the most sensitive and has to be protected from bright sources in space, even during manoeuvres. Specifically, the telescope needs to be kept away from the Sun by \(45{^{\circ }}\) during the time of observation as well as when the manoeuvres are taking place to reach new sources. Therefore, a novel manoeuvre strategy has been devised in such a way that the Sun is avoided prudently in the FoV of UVIT and other co-aligned payloads (Pandiyan et al. 2012; Khoral et al. 2012).
For this purpose, an onboard algorithm with kinematic manoeuvre strategy, based on heuristic manoeuvre time in a rest-to-rest set-up is designed. This algorithm approximates the manoeuver trajectory as a fourth order polynomial trajectory from the starting point to the ending point with the Sun as a third point away from this trajectory by \(\ge \)45\({^{\circ }}\). The bore axis of the payloads which is the positive roll axis, is made to follow the computed trajectory avoiding the Sun during manoeuvres. However, many times such manoeuvres create a very large momentum build-up beyond the capacity of the reaction wheels of the spacecraft which would end-up in losing pointing and occasionally attitude. Nevertheless, such situations arising out of selection of sources are prudently avoided by running a simulation tool on ground while selecting the sequence of targets.
It is noted from Fig. 3 that the output of the manoeuvre simulation tool and the actual spacecraft performance for a \(10{^{\circ }}\) slew carried out on 1st October 2015 is extremely close.

Comparison of quaternion outputs of manoeuvre simulation tool (line) and the on-orbit performance (\(+\)) for a \(10{^{\circ }}\) slew.
3 Scheduler design for payloads
The payload scheduler has several modules whose functions are well defined. The day-to-day operations of astronomical satellite is by using collected science proposals which are evaluated and approved based on their science merits. The celestial targets are not observable all through the year by virtue of the orbital characteristics, specific orientation of the spacecraft and angle constraints demanded by payloads. These conditions severely restrict the usable or observable period. Therefore, a Flight Dynamics Module (FDM) is evolved to check constraints and provide various inputs such as the source view period, orbital events such as station visibility, eclipse entry/exit, SAA entry/exit duration, etc., star sensor availability, Phased Array Antennae (PAA) availability for data downloading, etc. for the proposed celestial target orientations. Some of these events are dependent on spacecraft orientation and therefore, event by event must be worked out for every target for the scheduler to utilize and plan. With these inputs along with some special features of a payload sequencer embedded in Bus Management Unit (BMU), the mission planning is carried out along with several other spacecraft system constraints, such as momentum overloading, unexplained manoeuvre abort and other payload abort conditions. The most important module for operating the five payloads efficiently in AstroSat is the Command Sequence Generator (CSG) module which gathers all the information from the various modules and appropriately schedules the targets with requested modes and instrument configurations. These commands are generated daily at a suitable time of the day and uplinked to the spacecraft for next day operations. All the modules of the scheduler for AstroSat are detailed in the following sections:
3.1 AstroSat Proposal Processing Software (APPS)
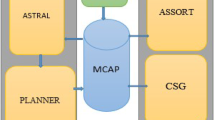
The AstroSat Proposal Processing Software (APPS) (Dewangan 2012) is developed for automating the proposal submission and review process for the AstroSat mission. The APPS is a web-based tool which caters to different types of users including the general observers, Payload Operation Center (POC) members, payload scientists and proposal reviewers. The APPS has the ability to validate submitted proposals for syntax checking, allowed parameter ranges and proposal completeness thus allowing proposers to detect errors. Further, APPS provides a complete and flexible interface for the users to specify instrument configurations appropriate to their science requirements. APPS allows proposers to update accepted proposals with changes requested in observing time, number of targets or instrument configurations as per recommendations of the technical and/or scientific peer-review processes. This maximizes the scientific output ensuring effective operation of the mission. The ‘proposal processing cycle’ involves activities such as (i) proposal submissions and (ii) reviews of proposals by expert committees comprising science teams of astronomers and satellite operational team members, providing acceptance, rejection and/or resubmissions which takes about 3 months of duration. At the end of the ‘processing cycle’ of APPS, the approved proposals and instrument configuration parameters are compiled and provided as Mission, Control And Proposals (MCAP) database for further use in scheduling.

Block diagram of ground segment for AstroSat and scheduler components for observations.
APPS is capable of scheduling various types of proposals, namely (i) Regular (R) wherein the source is viewed one time in the observation cycle of 6 months, (ii) Monitoring (MP) wherein the same source is scheduled after a fixed interval for several times within the observation cycle, (iii) Time Constrained (TC) proposals wherein coordinated observation with other observatories (terrestrial and space telescopes) and also to study time-dependent variation of source characteristics and (iv) Target of Opportunity (ToO) observations and anticipated ToO observations. The ground segment of AstroSat comprises of: (i) planning and scheduling (ii) ground station and operations and (iii) Science Data Centre. The block diagram of the overall ground segment is provided in Fig. 4 and the scheduler components for the source observations is provided in the red-marked closure of the diagram.
3.2 MCAP database
The final output from APPS after the review process is the creation and maintenance of a comprehensive proposals database. Incidentally, all information regarding entire proposals submitted and the outcome of evaluations (comments of referees and Time Allocation Committee (TAC) members, ratings, grades, etc.) has been stored in this database. However, a final database consisting of all accepted proposals along with instrument configuration parameters meant for operation of instruments is generated and provided to the AstroSat data archive system at the end of any cycle. The database is called Mission Control and Proposals (MCAP) database which is the basis for operation scheduling and management of science data flow.
MCAP database obtained from APPS is subsequently conceived as a growing database for the cycle having several other interfaces. The MCAP is having interfaces with the Flight Dynamics Module (FDM) and Mission Planning Module (MPM) and augmented with outputs of these modules. The targets are binned suitably every 15 days within the cycle at FDM and this file is available for the entire cycle as an output and stored in the MCAP database. This output is available as display for knowing the long- term plans of AstroSat scheduling. At MPM which has interfaces with both MCAP and FDM, the stored output of FDM, now taken bin-by-bin every 15 days, along with instrument parameters of MCAP file are used to schedule targets, meeting all spacecraft operational constraints such as capacity of wheel momentum, manoeuvrability without abort within a time limit, etc. Once a target is serviced, an indication flag for completion or non-completion is added in the MCAP database so that subsequently this information is used. Thus MCAP database contains the proposals, targets, instrument configurations, primary instrument and corresponding piggy back science settings for the other instruments, long-term schedule details of targets, the service completion flag to be used for data processing as well as delivery details to the proposer and finally serviced target lists for the past and present cycles, etc.

Schematic diagram of ASTRAL.
3.3 Flight Dynamics Module (FDM)
The main task of the Flight Dynamics Module (FDM) is to sort the various types of proposals, collect the targets, verify on-orbit geometrical constraints for the targets and establish the duration of availability of the targets for the entire cycle. Here a cycle consists of duration of 6 months. The six months duration is divided into 12 bins of 15 days duration. The targets are checked for meeting of (i) on-orbit geometric constraints, (ii) priority of targets based on time constraints, (iii) ATC priority assignment for the targets, etc. and suitably binned. The FDM consists of two modules namely: (i) AstroSat Scheduler TeRminus for pAyLoad (ASTRAL) and AstroSat Scheduler Software for OpeRaTions (ASSORT), though functionally they are similar.
3.3.1 AstroSat Scheduler TeRminus for pAyLoad (ASTRAL).
ASTRAL is the software for interfacing APPS and ASSORT, and is for long-term scheduling of targets which allow proposers to know in advance when the proposals/targets are likely to be scheduled. The main function of ASTRAL is to collect, sort and segregate various types of proposals and targets, check and validate the un-obstructive view period of each target, study the priority of targets assigned by ATC, time periods of constraints of time-constrained proposals, number of times of monitoring proposals, etc. and uses an assigning tool in such a way that the targets are binned to meet the observation efficiency of payloads. This way a set of targets are assigned to a particular bin which contains all regular, time constrained and one instant of pointing of a monitoring proposal. This bin will have a number of targets such that the total observation time put together is allotted approximately closer for 15 days of the bin cycle.
Likewise, all the 12 bin cycles are filled until all the proposals/targets are completely exhausted and scheduled. The output of the ASTRAL for the entire cycle is used to inform the proposers/guest observers for the likely period/time of observation of their proposals or targets. The functional flow diagram for the ASTRAL software is given in Fig. 5.
3.3.2 AstroSat Scheduler Software for OpeRaTions (ASSORT).
ASSORT takes the targets from the bins already worked out by ASTRAL and refine the period of view periods for the next 15 days using the latest orbital information. Further, ASSORT software generates the duration of satellite orbital events, source view duration, Earth occultation, star sensor occultation, PAA visibility, etc. for the given duration (preferably two weeks) for multiple celestial sources which is further used as an input by mission payload operations planner for scheduling and commanding the targets with the use of onboard payload sequencer. The view period is generated by considering all attitude constraints such as RAM angle, the Sun angle, the Moon angle, the Earth occultation with the Earth limb, star sensor occultation and phased array antennae visibility, etc. The duration of the sequence of events sorted in chronological order with preference to priority assigned by the APPS along with the view duration for various sources appropriately attached with the target ID will be stored in ASCII file and provided to Payload Operations Planning (POP) software of the mission group through growing MCAP. Also, this software obtains information of the flag stored for non-serviced source from POP after accessing the MCAP database such that the allocation of the same target for computing view duration is in the subsequent execution of ASSORT. The source view duration are generated by computing event functions at each step using the satellite ephemeris considering all attitude constraints, Earth occultation, star sensor occultation, PAA visibility, etc.

Schematic diagram of ASSORT.
Once the change of sign is detected, the root of the event function is detected by regula falsi method. The detected event and view duration along with the other orbital parameters are stored in an ASCII file and provided to POP. The functional block diagram of the ASSORT is provided in Fig. 6. It is to be noted that all targets of the proposal cycle are sequenced for long term (6 months to one year) using coarse orbit model in ASTRAL. On the other hand, ASSORT is employed for refining the outputs of ASTRAL for targets that are earmarked for the forthcoming operations closer to actual operations using accurate orbit information.
3.4 Payload sequencer
The payload sequencer module provides necessary commands for operation of all payloads together with satellite sub-systems that support the payload operations. The payload sequencer (P/L sequencer) software is embedded into Bus Management Unit (BMU) software and interfaces with the BMU to receive, interpret and execute tele-command issued from the ground as well as sets the different operational parameters of payloads according to the tele-command received. It provides housekeeping information to BMU for operation. Also, this module issues appropriate commands as per timelines programmed from ground. All the information required for a particular observation are remote uplinked and stored on-board and scheduled in queue with time-tagged commands. A schematic diagram of interface details of payload sequencer with BMU is provided in Fig. 7.

Interface of payload sequencer with BMU.

Functional diagram of the payload sequencer for AstroSat.
The functional diagram showing various systems that are participating with payload sequencer is provided in Fig. 8. All the actions in the P/L sequencer are defined through macros. These actions depend on the parameter change with respect to the time line. Each macro table has programmability of required list of commands along with the command execution time, the conditional requirement of the command and user defined data provision for each command. Payload sequencer is also required to issue playback command whenever the spacecraft is over Bengaluru visibility and SSR record command for continuous recording of data during observation period. SSR operations are programmed in a macro a priori in SSR macro and used suitably. Similarly, commands to operate intended PAA for data download and for handling change-over of either of the two PAAs suitably is carried out by PAA macros.
Macro Update is issued whenever macro definition is finalized and can be disabled by the ground command, if necessary. Macro is enabled by a Macro Init command programmed with the associated time of execution of OnBoard Time (OBT) and is stored in OnBoard Time-Time Tagged (OBT-TT) stack. A macro is disabled once the execution of all the commands in the macro is completed. Therefore, for execution of a macro, the operations of Macro Update Enable, PLDataset Update Enable, Macro Enable and MacroInit are all required.

Block diagram of macros ‘tree structure’ of the payload sequencer.
All enabled macros are polled alternatively in every major cycle with a repetition rate of 2 s. It is planned that at any one time, a maximum of 16 macros (12 issued from ground and 4 from onboard) can be executed one by one and there should be a minimum command- to-command delay of 2 s between them. While planning, the ground team should take care that the 13th macro should not mature. As per the design, the latest macro will get rejected onboard automatically as there is no slot available for execution. As per the design, all 12 macros which are uplinked from ground are to be functionally independent and the default variable execution time should be 1 s. Macros shall be disabled once the execution of all the required commands within them is completed in order to make the macros ready for the next execution automatically. By design, the ability to address all the parameters of any macro is available, such that any modification can be carried out using the edit feature for any of the attributes. In this P/L sequencer design, there exist a total of 64 general purpose macros with defined data structures. Each macro can have a maximum of 32 On/Off or data commands with their respective programmable fields. Abort macros can be initiated either by on-orbit or ground-based command. Macros 25–61 are user-defined macros and uplinked from ground. For example, macro 61 is user-defined abort initiation macro. Abort macros 61–63 are executed sequentially and they disable further execution of all macros, bring them to their initial state and initiate execution list in abort macros 62 and 63. A macro tree structure of the entire payload sequencer is shown in Fig. 9. A typical scenario for one orbit operation by the payload sequencer is provided in Fig. 10.

Typical scenario for AstroSat for one-orbit operation using macros.
3.5 SSM commands generation
One of the payloads, the Scanning Sky Monitor (SSM) is mounted along the +yaw axis. This payload has a motor that allows it to rotate and scan about the +yaw axis and surveys portion of the hemisphere of the sky for sudden transients, new sources, etc. The SSM is designed to have its scanning motion in a ‘step and stare’ mode so that pointing stability of other payloads is not affected. Since the observations of the other 4 payloads are primary and SSM is used as a secondary payload, the observation schedule of primary payloads decides the direction in which the SSM is observing. In order to work out the operational commanding of SSM, the schedule file from ASTRAL/ASSORT for the entire cycle/bin cycle is provided to SSM, in advance. The SSM commands generation module uses this information and computes sky-background for each pointing and accordingly generates commands for operating the units of SSM. These commands are passed on to Command Sequence Generation (CSG) module for regular operations of SSM.
3.6 Command Sequence Generator (CSG)
CSG module has to work with (i) several payload modes and corresponding instrument configurations which require very large number of commands, (ii) change in positions of UVIT filter wheels within an observation, (iii) SSM platform rotation modes, (iv) status changes of payloads and sub-systems at instances of orbital events such as: (a) SAA entry/exit (b) Earth occultation entry/exit and (c) eclipse entry/exit, etc. Apart from this, several satellite sub-systems such as PAA and star sensor availability require orientation-specific switching sequences and matching configurations and features of SSR – Data Handling (DH) system for them to work appropriately. Categorically, such sub-system commands are grouped into: (i) general switching features, (ii) P/L sequencer features, (iii) DH system features and (iv) SSR features that include SSR recording and SSR playback.
The major functions of the CSG system are:
-
(1)
Pertaining to each celestial target for observation, collection of pointing attitude quaternion, checking the Sun avoidance manoeuvre for any violation of spacecraft momentum capability, verifying all operational constraints and sub-system availability for the target orientation viz., PAA, star sensor functionality for the orientation, duration of meaningful observation period, etc. Finally CSG also sequences all the targets for the forthcoming 15 days of cycle, meeting all the constraints stated above. For this purpose, the activities carried out are:
-
(i)
Generation of manoeuvre profile on ground between target to target with an algorithm implemented on-board using a manoeuvre tool and if the simulated profile violates the Sun and momentum capability constraints, the target will not be considered for that period but will be accommodated later when it is permitted.
-
(ii)
Verification of star sensor and PAA availability for that orientation so that the pointing accuracy is ensured.
-
(iii)
By ascertaining the activity related to SADA operations for the orientation.
-
(iv)
By checking the duration of the observation period for effective operations and if found to be very small, the target will not be considered at that period but later when it has a feasible period.
-
(i)
-
(2)
Collection of instrument modes and parameter settings required for each observation in the sequence for all payload instruments. The CSG gets various modes of instruments as per requirements obtained from the accepted proposals. The ASSORT file containing information related to each orientation such as observation view period, SAA entry/exit, Albedo entry/exit, eclipse entry/exit, occultation entry/exit etc., are collected and CSG sets the instrument time events with suitable commands. For clear view duration, CSG generates exposure commanding, instrument mode selection, configuration settings of the instruments, filter wheel selections and appropriate settings of timings, etc.
-
(3)
Configure the entire view window suitably for observation efficiency and interleave the targets for any utilization of left-out buffer time with lower priority sources. Specifically, a scheme to accept Target of Opportunity (ToO) request in short notice, even after the finalization of the fortnight file obtained from ASSORT is transferred. As per the priority assigned to these ToO requests, schedule and changes are provided in the (\(T- 1\)) file, where T is the day of the operation.
-
(4)
At times, the orientation defined for a target may result in an inefficient momentum dumping since the Earth’s magnetic field and torquer field may become closely parallel. The effectiveness of torquer dumping is checked by CSG while planning. Further to that, estimation of momentum build-up using a ground model and generating a plan for momentum dumping is also carried out.
-
(5)
Finally, all other supporting sub-systems of the satellite such as SADA, SSR, PAA and other POWER related checks have been performed by CSG and managed for every orientation.
4 Scheduling of performance verification phase and results
All the subsystems of AstroSat were checked in a weeks’ time and well established by 6 October 2015 and subsequently, PV phase activities were initiated one instrument after another. The exercises thought out for PV phase were: (i) initial switch ‘ON’ sequence in order to verify the functioning of the instrument, (ii) pointing to a celestial source, observe and tune the instrument parameters, (iii) alignment estimation and uplinking for each instrument and finally, (iv) calibration exercises for instrument characterization. A total of 6 months was earmarked for the PV phase activities. The time schedule for all instruments planned and executed is provided in Table 1. Firstly, the Charge Particle Monitor (CPM) was switched on and was shown to perform as envisaged. Figure 11(a) and 11(b) provide count rate and contour map of SAA CPM, and CPM is found to work satisfactorily.

Count rate and contour map of SAA measured by CZTI-CPM. Courtesy: Professor A R Rao and team, TIFR Bombay.
CZTI operations. The CZTI electronics power-on was conducted on 2nd October 2015 and high voltage and South Atlantic Anomaly (SAA) operations were tested on 5th October 2016. Further, CZTI threshold setting and pixel enable/disable were carried out and continued until the instrument is stabilized. Calibration exercises with set patterns were carried out to find out the bore axis centre and the response characteristics of the detector FoV. The calibrations were carried out with 8-points spaced around the bore axis with \(0.5{^{\circ }}\) and \(1{^{\circ }}\) in a square FoV. This has helped in locating the centre of the bore axis. In order to get responses of the edges of the detector, the source is made to fall at the edges of the FoV and away by about \(20{^{\circ }}\) from one of the edges. The patterns of calibrations exercised are shown in Fig. 12. The image of CRAB nebula from CZTI first light is provided in Fig. 13. A detailed performance of CZTI payload has been presented in Rao et al. (2017).
SSM operations. The SSM electronics and high voltage checks were conducted on 12th October 2015 and SAA operations were verified on the same date. In this period, the SSM motion compensation model implemented in AOCS was tested and found that it is effective and as per design requirements. In calibrating the detectors of SSM, calibration exercises with set patterns, shown in Fig. 14, were carried out. It is to be stated that what was carried out as calibration exercises for SSM were much more involved as it was an afterthought. As per design, the spacecraft was configured to meet on-orbit Sun angle constraints of +roll direction only. However, SSM is mounted along the +yaw direction and if the requested sources were to appear in various parts of the detectors which are having long (\(110{^{\circ }})\) and wide (\(+26{^{\circ }})\) Field-of-View (FoV), the expected constraints on the spacecraft +roll axis were violated severely. Further to this, on-orbit experience revealed that the thermal design did not allow the Sun to fall away from the yaw–roll plane even by a small angle; any out of plane movement of the Sun caused the drift characteristics of gyroscopes to change to a larger value which was detrimental in meeting the pointing accuracy. Therefore, a procedure is evolved in obtaining the orientation of the spacecraft in such a way that the source to be viewed falls on the areas of FoV of the \(+\)yaw side and yet meets the viewing constraints of the \(+\)roll axis so that all the other four payloads are safe. The source ‘Crab Nebula’ was targeted and the entire calibration was carried out for SSM.

Calibration patterns of CZTI.

CZTI first light image of CRAB Nebula. Courtesy: Prof. A. R. Rao and team, TIFR Bombay.

Calibration points on SSM FoV.
The first light image of CRAB from SSM is presented in Fig. 15. Apart from Crab Nebula, the SSM has monitored sources such as GRS1915\(+\)105, 4U0115\(+\)63, etc. SSM has also shown its capability to detect the solar flare X-ray observations when it is under the Earth’s shadow on 16th October 2015.

AstroSat–SSM first light image of Crab Nebula. Courtesy: Dr. M. C. Ramadevi and team, ISAC, Bengaluru.
LAXPC operations. The LAXPC units were powered on 30th September 2015 and checks on modes such as Event A, Anti-Bypass (AB) and FC were tested. On 19th October 2015, high voltage tests were performed. Bellow pumps of all three detectors were operated and the purification process was carried out during 20–22 October, 2015. The purification of detector gas of LAXPC10, LAXPC20 and LAXPC30 were performed for the duration of about 2.5 h, 3.5 h and 1.0 h, respectively. The energy resolution for LAXPC10 was improved from 21% to about 14% and LAXPC20 and LAXPC30 detectors have achieved energy resolution of around 10–12% during this process. The instrument with all the three detectors was declared ready for observations. Initially, the calibrations were performed with source, Crab Nebula and subsequently, sources such as GRS1915+105, CAS, Cygnus-X-1, Cygnus-X-3, LMC_X3, 4U0115+63, Vela X-1, SGP, A2387, 3C390.3 and 4U 1847+78 were observed. The calibration patterns employed to study the LAXPC payload are as in Fig. 16 and it closely follows CZT calibrations.

Patterns of calibrations carried out for LAXPC.
Additionally, uniform scans across the FoV of LAXPC were performed with a uniform rate of 0.010 deg per second from \(+3{^{\circ }}\) to \(-3{^{\circ }}\) along yaw and pitch directions. This data has been analysed and the first cut results of alignment of each detector is computed and provided in Table 2. Subsequently these numbers were further refined by improving the pointing of the spacecraft by tuning gyroscopes and star sensor drift behaviour. The pointing is found to be well within the specification for the mission which is \(0.05{^{\circ }}\) (\(3\upsigma \)). Figure 17(a) and 17(b) provide the performance of the spacecraft before and after drift rate compensation. There is a marked improvement in pointing about yaw and roll; pitch continues to be within \(0.05{^{\circ }}\). For a detailed study of calibrations of LAXPC and their capabilities, the reader is referred to Antia et al. (2017).
SXT operations. SXT was powered on 30th September 2015 and the telescope door and FPCA door were opened on 15th October 2015 and 26th October 2015, respectively after sufficient precaution of providing time for out-gassing. The source observations started on 19th October 2015 onwards and the sources PKS-2155-304, HR-2047, HIP-19265, AR_Lac, Tycho and 2E0102-7217 were observed. Calibration exercises were performed with the following pattern for PKS-2155-304 and 2E0102-7217. The pattern for the calibration for SXT is given in Fig. 18. The first light image of SXT of the source PKS-2155-304 is provided in Fig. 19.

(a), (b). Spacecraft pointing accuracy before and after drift calibrations.

The 21-point diagonal calibration pattern for SXT.

First light image of PKS-2155-304 by SXT. Courtesy: Prof. K. P. Singh and team, TIFR, Bombay.
UVIT operations. The electronics of UVIT payloads were tuned ON and tested for over a period of 45 days since September until November 2015. After sufficient time is spent for the out-gassing of the spacecraft materials, the UVIT doors were opened on 30 November 2016. As a first source, NGC 188 was aimed at and subsequently sources NGC40, NGC 2336, SWIFT 1854-7853, Abell 2256 and GD419 were observed. The calibration of the instrument was performed with both NGC188 and GD419 periodically. Also, a calibration pattern for UVIT was also worked out and calibrations were carried out with several sources. The pattern suggested for UVIT is as shown in Fig. 20 with 9 points in the circular FoV with an arc radius of 7 arc min and 10 arc min. The UVIT image of NGC2336 is presented along with a Galex image of the same source in Fig. 21 for comparison. The image indicates that UVIT image is sharp and has more details for the first cut result.

The UVIT calibration pattern (with 9 points) in the circular FoV with arc radius of 7 arc min and 10 arc min.

(a) Image of NGC2336 from AstroSat and (b) GALEX. Courtesy: Prof. Shyam Tandon and team, IIA, Bengaluru.
During the entire PV phase, in spite of several obstacles and hurdles encountered in keeping with the pace of the activities, all the planned activities as per Table 1 were completed and the spacecraft is declared operational for Guaranteed Time Observations (GuTO) for the next six month cycle.
5 GuTO phase operations scheduling and automation experiment
During PV phase, since the payloads were switched ON one after the other and simultaneous multi-wavelength observations of all instruments were deferred to the end of the cycle, scheduling of operations were carried out manually most of the time. However, PV phase proposals were collected by operating APPS, and MCAP database was made ready for usage. To handle the MCAP database manually, an intermediate procedure was worked out which used a query-based tool to collect targets of a particular instrument and operated. ASTRAL functionality was completely avoided during the PV phase. ASSORT was used almost like ASTRAL but with a refined orbit and for a maximum cycle of 3–7 days. Also, the proposals considered were of ‘regular’ type wherein the targets were operated only one time for a proposal.
The most noted improvement during GuTO time was that the APPS invoked other types of proposals such as ‘monitoring proposals’ wherein a specific target can be observed at regular intervals for certain number of times in an entire proposal cycle, ‘time constrained proposals’ where co-ordinated observations with other astronomy telescopes as well as for studying certain expected behaviour of a target during a specific time period. Also, several Target of Opportunity (ToO) proposals were also serviced. Thus the MCAP database consists of all types of proposals including ‘regular’ proposals.
By the end of the GuTO phase, all the functions of the AstroSat scheduling system were invoked effectively. The targets have been identified for all 12 bins of 15 days duration for the entire proposal cycle using ASTRAL. All the functions of ASSORT, CSG and SSM command generation were tested extensively. Occasionally, due to some specific demands of the payload managers, though some changes and disruptions were experienced in the cycle, the entire scheduling process went through without any hindrance. The entire scheduling system that includes proposal submissions, MCAP generation, flight dynamic tools such as ASTRAL and ASSORT modules along with Command Sequence Generator and operations were nearly automated.
6 Conclusions
The components of an efficient planning and scheduling system developed for observations of all five payloads of the space observatory, AstroSat has been presented. Though all but one of the payloads SSM is co-aligned, UVIT differed in observing objects during orbit eclipse only due to the sensitive nature of that payload. Therefore, UVIT operations need a different kind of scheduling activity whenever UVIT was operated. Also, the SSM is working in a ‘step and stare’ mode and a motion compensation algorithm is implemented in order to improve the pointing performance and settling time. The performance of the compensation algorithm is found satisfactory. All payloads and systems of AstroSat performed with several on-orbit constraints together with constrained manoeuvres and the performance of AstroSat is found as expected. AstroSat met the goals except that the effective Sun angle constraint needed on-orbit is found to be \(\ge \)65\({^{\circ }}\).
In this planning and scheduling system, the proposals are collected for a period of 6 months, called a cycle. They are evaluated and accepted once the announcement of the opportunity is closed. At the end of the collection of proposals, a consolidated database consisting of accepted proposals and instrument configuration parameters is created which is the basis for the planning and scheduling system. Then onwards, a growing database with this dataset as a base is developed, which stores the ASTRAL outputs every 15 days of bin for the duration of a cycle. This database plays as interlink between CSG, FDS and SSM related operations for the entire cycle. CSG uses these datasets and checks for wheel momentum build-up, other orbit constraints such as regions for SAA entry/exit, visibility of ground station, PAA selection logic, etc. and suitably sequences and schedules the targets every 15 days. Once it is scheduled and the commands are stored on orbit in terms of time-tagged onboard time, the payload sequencer executes the commands when maturity of the on-board time occurs. The database also collects information as a flag from ground station for reception of ground data for scheduled targets and completion of subsequent processes for data products. The entire process was established and checked in the first 2 months of the GuTO cycle of AstroSat and the planning and scheduling system is found to perform fairly well.
References
Antia, H. M., Yadav J. S. et al. (2017) Calibration of the Large Area X-ray Proportional Counter (LAXPC) instrument on-board Astrosat, submitted to J. Astrophys. Astr., this issue.
Brissenden, R. J. (2001) Chandra X-ray Observatory Operations, Astronomical Data Analysis Software and Systems, X ASP Conference Series, edited by F. R. Harnden Jr., F. A. Primini & H. E. Payne, vol. 238.
Dahlem, M. (1998) XMM Remote Proposal Submission, The first XMM Workshop, ESTEC, Noordwijk, The Netherlands, 30 Sept.–2 Oct., 1998.
Dewangan, G. C. (2012) Software Design Document for ASTROSAT Proposal Processing System, IUCAA.
Fuerst, F., Harrison, F. A. et al. (2012) The Nuclear Spectroscopic Telescope Array (NuSTAR): Science Mission and Performance, Proceedings of Science, an INTEGRAL view of the high-energy sky (the first 10 years), 9th INTEGRAL workshop and celebration of the 10th anniversary of the launch, October 15–19, 2012, Paris, France.
Khoral, J. S., Natarajan, P., Pandiyan, R., Bharadwaj, K. M., Parmeswaran, K. (2012) Attitude and Orbit Control System (AOCS) Design for ASTROSAT, IAA-AAS-DyCoSS1-13-03, 1st IAA Conference on Dynamics and Control of Space Systems, March 19-21, 2012, Porto, Portugal.
Lumb, D. H. (1998) XMM Instrument Modes and Operation, The first XMM Workshop, 30 Sept.–2 Oct., ESTEC, Noordwijk, The Netherlands.
Much, R., Barr, P. et al. (2003) The INTEGRAL ground segment and its science operations centre, A & A, 411.1, L49–L52.
Muscettola, N., Pell, B., Hansson, O., Mohan, S. 1995, Automating Mission Scheduling for Space Based Observatories, Robotic Telescopes: Current Capabilities, Present Developments and Future Prospects for Automated Astronomy, edited by G. W. Henry & J. A. Eaton, Astronomical Society of the Pacific, Provo, UT.
Nagamani, T., Bharadwaj, N., Dakshayani B. P., Pandiyan, R. (2010) ASTROSAT Software Tool to Aid Celestial Source Viewing, 61st International Astronautical Congress, Prague, CZ, Paper IAC-10-A3.4.6, 2010.
Ong, J. C., Rackley, M. (2002) Autonomous Operations of the SWIFT Mission, Space Operations 2002 Conference, 10–19 October 2002, Houston, TX.
Pandiyan, R., Ramesh, A. S., Sharanappa, S. (2012) Kinematic Attitude Maneuvers with Path Constraints for ASTROSAT–An Indian Astronomy Satellite, IAA-AAS-DyCoSS1-05-07, 1st IAA Conference on Dynamics and Control of Space Systems, March 19–21, 2012, Porto, Portugal.
Palmar, I. M., Merri, M., White, N. Efficient Planning of the Scientific Observations for XMM”, Paper Id. 2b003, citeseerX reference.
Rao, A. R. et al. (2017) ASTROSAT CZT Imager Observations of GRB 151006A: Timing, Spectroscopy and Polarisation Study, submitted to J. Astrophys. Astr., this issue.
Singh, K. P. et al. (2017) The soft X-ray focusing telescope aboard ASTROSAT and its post-launch scientific capabilities, J. Astrophys. Astr. (2017), this issue.
Acknowledgements
The authors profoundly thank the Indian Space Research Organization for this excellent opportunity and freedom to work and develop a new planning and scheduling system for AstroSat. They further record their sincere appreciation and indebtedness to various payload managers who have provided their first light results pertaining to their instruments. The authors also wish to thank the reviewer for his critical comments which certainly improved the quality of the presentation.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Pandiyan, R., Subbarao, S.V., Nagamani, T. et al. Planning and Scheduling of Payloads of AstroSat During Initial and Normal Phase Observations. J Astrophys Astron 38, 35 (2017). https://doi.org/10.1007/s12036-017-9446-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12036-017-9446-9