
Abstract
In this paper, we study a modified viscosity implicit rule of a nonexpansive mapping in Hilbert spaces. Strong convergence theorems are obtained under some suitable assumptions imposed on the parameters. As applications, we obtain some strong convergence theorems for solving fixed-point problems of strict pseudocontractive mappings and finite equilibrium problems in Hilbert spaces. We also give some numerical examples to support our main results.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Let H be a real Hilbert space with the inner product \(\left<\cdot \right>\) and let C be a nonempty closed convex subset of H. We denote by F(T) the set of fixed points of a nonlinear mapping T. Now, we recall some concepts.
A mapping \(f: C\rightarrow C \) is called a strict contraction if there exists a constant \(\alpha \in (0,1)\) satisfying
A mapping \(T:C\rightarrow H\) is called nonexpansive if
A mapping \(A:C\rightarrow H\) is called monotone if
A mapping \(A:C\rightarrow H\) is called \(\alpha \)-inverse strongly monotone if there exists a positive real number \(\alpha \), such that
A mapping \(F:C\rightarrow H\) is called k-Lipschitzian if there exists a positive constant k, such that
A mapping \(F:C\rightarrow H\) is called \(\eta \)-strongly monotone if there exists a positive constant \(\eta \), such that
\(A:C\rightarrow H\) is called a strongly positive bounded linear operator if there exists a constant \(\gamma >0\) such that
Remark 1.1
It is easy to see that strongly positive bounded linear operator A is \(\left\| A\right\| \)-Lipschitzian and \(\gamma \)-strongly monotone.
Recently, viscosity iterative algorithms for approximating a common element of the set of fixed points of nonexpansive mappings and the set of solutions of equilibrium problems have been investigated extensively by many authors, see [1,2,3,4,5,6,7,8,9] and the references therein. For instance, Moudafi [1] studied the viscosity technique for nonexpansive mappings in Hilbert spaces. Moreover, Xu [2] refined the main results of [1] in Hilbert spaces and extended them to more general uniformly smooth spaces.
Very recently, the implicit midpoint rule has become a powerful numerical method for solving ordinary differential equations; see [10,11,12,13,14,15,16] and the references therein. Xu et al. [14] introduced the following viscosity implicit midpoint rule:
Precisely, they proved the following theorem.
Theorem 1.2
(Xu et al. [14]). Let H be a Hilbert space, C a closed convex subset of H, \(T:C\rightarrow C\) a nonexpansive mapping with \(S:=F(T)\ne \emptyset \), and \(f:C\rightarrow C\) a contraction with coefficient \(\alpha \in [0,1)\). Let \(\left\{ x_n\right\} \) be generated by the viscosity implicit midpoint rule (1.8), where \(\left\{ \alpha _n\right\} \) is a sequence in (0, 1) satisfying
-
(C1) \(\lim _{n\rightarrow \infty }\alpha _n=0\),
-
(C2) \(\sum _{n=0}^\infty \alpha _n=\infty \),
-
(C3) either \(\sum _{n=0}^\infty \left| \alpha _{n+1}-\alpha _n\right| <\infty \) or \(\lim _{n\rightarrow \infty }\frac{\alpha _{n+1}}{\alpha _n}=1\). Then, \(\left\{ x_n\right\} \) converges in norm to a fixed point q of T, which is also the unique solution of the variational inequality:
$$\begin{aligned} \left<(I-f)q,x-q\right>\ge 0, \quad \forall \, x\in S. \end{aligned}$$
Motivated and inspired by Xu et al. [14], Ke and Ma [16] studied the following generalized viscosity implicit rule:
More precisely, they obtained the followings results.
Theorem 1.3
(Ke and Ma [16]). Let C be a nonempty closed convex subset of the real Hilbert space H. Let \(T:C\rightarrow C\) be a nonexpansive mapping with \(F(T)\ne \emptyset \) and \(f:C\rightarrow C\) be a contraction with coefficient \(\theta \in [0,1)\). Pick any \(x_0\in C\), let \(\left\{ x_n\right\} \) be a sequence generated by (1.9), where \(\left\{ \alpha _n\right\} \) and \(\left\{ s_n\right\} \) are two sequences in (0, 1) satisfying the following conditions:
-
(1)
\(\lim _{n\rightarrow \infty }\alpha _n=0\),
-
(2)
\(\sum _{n=0}^\infty \alpha _n=\infty \),
-
(3)
\(\sum _{n=0}^\infty \left| \alpha _{n+1}-\alpha _n\right| <\infty \),
-
(4)
\(0<\varepsilon \le s_n\le s_{n+1}<1\) for all \(n\ge 0\). Then, \(\left\{ x_n\right\} \) converges strongly to a fixed point q of the nonexpansive mapping T, which is also the unique solution of the variational inequality:
$$\begin{aligned} \left<(I-f)q,x-q\right>\ge 0,\quad \forall \, x\in F(T). \end{aligned}$$In other words, q is the unique fixed point of the contraction \(P_{F(T)}f\), that is, \(P_{F(T)}f(q)=q\).
The purpose of this paper is to study a modified viscosity implicit rule of a nonexpansive mapping in Hilbert spaces. Under some suitable assumptions imposed on the parameters, we prove some strong convergence theorems. As applications, we obtain some strong convergence theorems for solving fixed-point problems of strict pseudocontractive mappings and finite equilibrium problems in Hilbert spaces. Some numerical examples are also given to support our main results.
2 Preliminaries
Let C be a nonempty closed convex subset of H. For all \(x\in H\), there exists a unique nearest point in C, denoted by \(P_Cx\), such that
P is called a metric projection of H onto C. We know that \(P_C\) is a nonexpansive mapping of H onto C and satisfies
Moreover, \(P_Cx\) is characterized by the following properties: \(P_Cx\in C\) and
For properties of the metric projection, we refer the readers to [17] and the reference therein.
We need the following lemmas for proving our main results.
Lemma 2.1
([2, 18]). Assume that \(\left\{ a_n\right\} \) is a sequence of nonnegative real numbers, such that
where \(\left\{ \alpha _n\right\} \) is a sequence in (0, 1) and \(\left\{ \delta _n\right\} \) is a sequence in \(\mathbb {R}\), such that
-
(i)
\(\sum _{n=0}^\infty \alpha _n=\infty \),
-
(ii)
either \(\limsup _{n\rightarrow \infty }\frac{\delta _n}{\alpha _n}\le 0\) or \(\sum _{n=1}^\infty \left| \delta _n\right| <\infty \). Then, \(\lim _{n\rightarrow \infty }a_n=0\).
Lemma 2.2
([19]). Let C be a nonempty closed convex subset of a real Hilbert space H. Let S be a nonexpansive self-mapping on C with \(F(T)\ne \emptyset \). Then, \(I-S\) is demiclosed, that is, whenever \(\left\{ x_n\right\} \) is a sequence in C weakly converging to some \(x\in C\) and the sequence \(\left\{ (I-S)x_n\right\} \) strongly converges to some y, it follows that \((I-S)x=y\), where I is the identity operator of H.
Lemma 2.3
([20]). Let \(\lambda \) be a number in (0, 1] and \(T:C\rightarrow H\) be a nonexpansive mapping, we define the mapping \(T^\lambda :C\rightarrow H\) by
where \(F:H\rightarrow H\) is k-Lipschitzian and \(\eta \)-strongly monotone. Then, \(T^\lambda \) is a contraction provided \(0<\mu <\frac{2\eta }{k^2}\), that is
where \(\tau =1-\sqrt{1-\mu (2\eta -\mu k^2)}\in (0,1]\).
3 Main results
Theorem 3.1
Let C be a nonempty closed convex subset of a real Hilbert space H. Let \(T:C\rightarrow C\) be a nonexpansive mapping with \(F(T)\ne \emptyset \) and \(f:C\rightarrow C\) a strict contraction with coefficient \(\alpha \in [0,1)\). Let \(F:C\rightarrow H\) be k-Lipschitzian and \(\eta \)-strongly monotone with constants \(k,\eta >0\), such that \(\alpha <\tau \) and \(0<\mu <\frac{2\eta }{k^2}\), where \(\tau =1-\sqrt{1-\mu (2\eta -\mu k^2)}\in (0,1]\). For arbitrarily given \(x_{0}\in C\), let \(\left\{ x_{n}\right\} \) be a sequence generated by
where \(\{\alpha _{n}\}\) and \(\{s_{n}\}\) are two sequences in (0, 1] satisfying the following conditions:
-
(i)
\(\lim _{n\rightarrow \infty }\alpha _{n}=0\);
-
(ii)
\(\sum _{n=0}^{\infty }\alpha _{n}=\infty \) and \(\sum _{n=0}^{\infty }\left| \alpha _{n+1}-\alpha _n\right| <\infty \);
-
(iii)
\(0<\varepsilon \le s_n\le s_{n+1}<1\) for all \(n\ge 0\).
Then, \(\left\{ x_{n}\right\} \) converges strongly to a fixed point \(q\in F(T)\), which also solves the variational inequality:
Proof
First, we show that \(\{x_{n}\}\) is bounded. Indeed, take \(p\in F(T)\) arbitrarily, it follows from Lemma 2.3 and (3.1) that
which implies that
Therefore, we obtain
By induction, we have
Hence we obtain that \(\{x_{n}\}\) is bounded.
Second, we prove that \(\lim _{n\rightarrow \infty }\Vert x_{n+1}-x_{n}\Vert =0\). We observe that
where
This implies that
From condition (iii), we have
It follows that
By (3.2), we get that
From condition (ii) and Lemma 2.1, we obtain
It follows from condition (i) and (3.3) that
Third, we show that
where \(q=P_{F(T)}(f+I-\mu F)(q)\). Indeed, there exists a subsequence \(\{x_{n_i}\}\) of \(\{x_{n}\}\), such that
Now, we prove that \(P_{F(T)}(f+I-\mu F)\) is a contractive mapping. In fact, for any \(x,y\in C\), by Lemma 2.3, we have
which implies that \(P_{F(T)}(f+I-\mu F)\) is a contractive mapping. Banach’s Contraction Mapping Principle guarantees that \(P_{F(T)}(f+I-\mu F)\) has a unique fixed point. Say \(q\in C\), that is, \(q=P_{F(T)}(f+I-\mu F)(q)\). Since \(\left\{ x_n\right\} \) is a bounded in C, without loss of generality, we can assume that \(x_{n_i}\rightharpoonup z\in C\). From (3.4) and Lemma 2.2, we have \(z\in F(T)\). Then, it follows from (2.3) that
which implies that (3.5) holds. By (3.3), we obtain that
Finally, we prove that \(x_n\rightarrow q\) as \(n\rightarrow \infty \). Put \(y_n=\alpha _{n}f(x_{n})+(I-\alpha _n\mu F)T(s_nx_{n}+(1-s_n)x_{n+1})\). Then, \(x_{n+1}=P_Cy_n\). By (2.3) and (3.1), we have
which implies that
It follows that
We note that
Apply Lemma 2.1 to (3.7), we conclude that \(x_n\rightarrow q\) as \(n\rightarrow \infty \). This finishes the proof. \(\square \)
The following results can be obtained by Theorem 3.1 easily, we omit the details.
Theorem 3.2
Let C be a nonempty closed convex subset of a real Hilbert space H. Let \(T:C\rightarrow C\) be a nonexpansive mapping with \(F(T)\ne \emptyset \) and \(f:C\rightarrow C\) be a strict contraction with coefficient \(\alpha \in [0,1)\). Let \(F:C\rightarrow H\) be k-Lipschitzian and \(\eta \)-strongly monotone with constants \(k,\eta >0\), such that \(\alpha <\tau \) and \(0<\mu <\frac{2\eta }{k^2}\), where \(\tau =1-\sqrt{1-\mu (2\eta -\mu k^2)}\in (0,1]\). For arbitrarily given \(x_{0}\in C\), let \(\left\{ x_{n}\right\} \) be a sequence generated by
where \(\{\alpha _{n}\}\) is a sequence in (0, 1] satisfying the following conditions:
-
(i)
\(\lim _{n\rightarrow \infty }\alpha _{n}=0\);
-
(ii)
\(\sum _{n=0}^{\infty }\alpha _{n}=\infty \) and \(\sum _{n=0}^{\infty }\left| \alpha _{n+1}-\alpha _n\right| <\infty \). Then, \(\left\{ x_{n}\right\} \) converges strongly to a fixed point \(q\in F(T)\), which also solves the variational inequality:
$$\begin{aligned} \left<f(q)-\mu F(q),y-q\right>\le 0,\text { for all } y\in F(T). \end{aligned}$$
Theorem 3.3
Let C be a nonempty closed convex subset of a real Hilbert space H. Let \(T:C\rightarrow C\) be a nonexpansive mapping with \(F(T)\ne \emptyset \) and \(f:C\rightarrow C\) a strict contraction with coefficient \(\alpha \in [0,1)\). Let \(A:C\rightarrow H\) be a strongly positive bounded linear operator with a constant \(\gamma >0\), such that \(\alpha <\tau \) and \(0<\mu <\frac{2\gamma }{\left\| A\right\| ^2}\), where \(\tau =1-\sqrt{1-\mu (2\gamma -\mu \left\| A\right\| ^2)}\in (0,1]\). For arbitrarily given \(x_{0}\in C\), let \(\left\{ x_{n}\right\} \) be a sequence generated by
where \(\{\alpha _{n}\}\) and \(\{s_{n}\}\) are two sequences in (0, 1] satisfying the following conditions:
-
(i)
\(\lim _{n\rightarrow \infty }\alpha _{n}=0\);
-
(ii)
\(\sum _{n=0}^{\infty }\alpha _{n}=\infty \) and \(\sum _{n=0}^{\infty }\left| \alpha _{n+1}-\alpha _n\right| <\infty \);
-
(iii)
\(0<\varepsilon \le s_n\le s_{n+1}<1\) for all \(n\ge 0\). Then, \(\left\{ x_{n}\right\} \) converges strongly to a fixed point \(q\in F(T)\), which also solves the variational inequality:
$$\begin{aligned} \left<f(q)-\mu A(q),y-q\right>\le 0,\text { for all } y\in F(T). \end{aligned}$$
4 Applications
In this section, we discuss some of the applications of our scheme.
4.1 Application to strict pseudocontractive mappings
A mapping \(T:C\rightarrow H\) is called a k-strict pseudo-contraction if there exists a constant \(k\in [0,1)\), such that
Lemma 4.1
([21]). Let \(T:C\rightarrow H\) be a k-strict pseudo-contraction with \(F(T)\ne \emptyset \). Then, \(F(P_CT)=F(T)\).
Lemma 4.2
([21]). Let \(T:C\rightarrow H\) be a k-strict pseudo-contraction. Define \(S:C\rightarrow H\) by \(Sx=\delta x+(1-\delta )Tx\) for each \(x\in C\). Then, as \(\delta \in [k,1)\), S is nonexpansive, such that \(F(S)=F(T)\).
Theorem 4.3
Let C be a nonempty closed convex subset of a real Hilbert space H. Let \(T:C\rightarrow H\) be a \(\nu \)-strict pseudo-contraction with \(F(T)\ne \emptyset \) and \(f:C\rightarrow C\) a strict contraction with coefficient \(\alpha \in [0,1)\). Let \(F:C\rightarrow H\) be k-Lipschitzian and \(\eta \)-strongly monotone with constants \(k,\eta >0\), such that \(\alpha <\tau \) and \(0<\mu <\frac{2\eta }{k^2}\), where \(\tau =1-\sqrt{1-\mu (2\eta -\mu k^2)}\in (0,1]\). For arbitrarily given \(x_{0}\in C\), let \(\left\{ x_{n}\right\} \) be a sequence generated by
where \(\delta \in [\nu ,1)\), \(\{\alpha _{n}\}\), and \(\{s_{n}\}\) are two sequences in (0, 1] satisfying the following conditions:
-
(i)
\(\lim _{n\rightarrow \infty }\alpha _{n}=0\);
-
(ii)
\(\sum _{n=0}^{\infty }\alpha _{n}=\infty \) and \(\sum _{n=0}^{\infty }\left| \alpha _{n+1}-\alpha _n\right| <\infty \);
-
(iii)
\(0<\varepsilon \le s_n\le s_{n+1}<1\) for all \(n\ge 0\). Then, \(\left\{ x_{n}\right\} \) converges strongly to a fixed point \(q\in F(T)\), which also solves the variational inequality:
$$\begin{aligned} \left<f(q)-\mu F(q),y-q\right>\le 0,\text { for all } y\in F(T). \end{aligned}$$
Proof
Define \(S:C\rightarrow H\) by \(Sx=\delta x+(1-\delta )Tx\) for each \(x\in C\). Then, we can rewrite (4.2) as follows:
By Lemmas 4.1 and 4.2, we have \(F(T)=F(P_CS)\). Therefore, we obtain the desired results by Theorem 3.1 immediately. \(\square \)
4.2 Application to equilibrium problems in Hilbert spaces
Let \(\phi :C\times C\rightarrow \mathbb {R}\) be a bifunction, where \(\mathbb {R}\) is the set of real numbers. The equilibrium problem for the function \(\phi \) is to find a point \(x\in C\) satisfying
The set of solutions of (4.3) is denoted by \(EP(\phi )\). It is well known that equilibrium problem contains fixed-point problems, variational inequality problems, and optimization problems as its special cases (see, Blum and Oetti [4]).
For solving the equilibrium problem, we assume that the bifunction \(\phi \) satisfies the following conditions (see [4]):
-
(A1)
\(\phi (x,x)=0\) for all \(x\in C\);
-
(A2)
\(\phi \) is monotone, i.e., \(\phi (x,y)+\phi (y,x)\le 0\) for any \(x,y\in C\);
-
(A3)
\(\phi \) is upper-hemicontinuous, i.e., for each \(x,y,z\in C\)
$$\begin{aligned} \limsup _{t\rightarrow 0^+}\phi (tz+(1-t)x,y)\le \phi (x,y); \end{aligned}$$ -
(A4)
\(\phi (x,.)\) is convex and weakly lower semicontinuous for each \(x\in C\).
Lemma 4.4
([4]). Let C be a nonempty closed convex subset of H and let \(\phi \) be a bifunction of \(C\times C\) into \(\mathbb {R}\) satisfying (A1)-(A4). Let \(r>0\) and \(x\in H\). Then, there exists \(z\in C\), such that
Lemma 4.5
([22]). Assume that \(\phi :C\times C\rightarrow \mathbb {R}\) satisfies (A1)–(A4). For \(r>0\) and \(x\in H\), define a mapping \(T_r:H\rightarrow C\) as follows:
for all \(z\in H\). Then, the following holds:
-
(1)
\(T_r\) is single-valued;
-
(2)
\(T_r\) is firmly nonexpansive,i.e., for any \(x,y\in H\), \(\left\| T_rx-T_ry\right\| ^2\le \left<T_rx-T_ry,x-y\right>\). This implies that \(\left\| T_rx-T_ry\right\| \le \left\| x-y\right\| ,\quad \forall \, x,y\in H\), i.e., \(T_r\) is a nonexpansive mapping;
-
(3)
\(F(T_r)=EP(\phi ),\quad \forall \, r>0\);
-
(4)
\(EP(\phi )\) is a closed and convex set.
A mapping T is called to be attracting nonexpansive if it is nonexpansive and satisfies:
Lemma 4.6
([23]). Suppose that E is strictly convex, \(T_1\) an attracting nonexpansive, and \(T_2\) a nonexpansive mapping which have a common fixed point. Then, we have \(F(T_1T_2)=F(T_2T_1)=F(T_1)\cap F(T_2)\).
Theorem 4.7
Let C be a nonempty closed convex subset of a real Hilbert space H. Let \(\phi _i:C\times C\rightarrow \mathbb {R}\) be a bifunction satisfying the conditions (A1)–(A4), where \(i\in \left\{ 1,2,\ldots ,M\right\} \) and M is a positive integer. Let \(T:C\rightarrow C\) be a nonexpansive mapping with \(\Omega =F(T)\cap \cap _{i=1}^MEP(\phi _i)\ne \emptyset \) and \(f:C\rightarrow C\) a strict contraction with coefficient \(\alpha \in [0,1)\). Let \(F:C\rightarrow H\) be k-Lipschitzian and \(\eta \)-strongly monotone with constants \(k,\eta >0\), such that \(\alpha <\tau \) and \(0<\mu <\frac{2\eta }{k^2}\), where \(\tau =1-\sqrt{1-\mu (2\eta -\mu k^2)}\in (0,1]\). For arbitrarily given \(x_{0}\in C\), let \(\left\{ x_{n}\right\} \) be a sequence generated by
where \(r_i>0\), \(i\in \left\{ 1,2,\ldots ,M\right\} \); \(\{\alpha _{n}\}\) and \(\{s_{n}\}\) are two sequences in (0, 1] satisfying the following conditions:
-
(i)
\(\lim _{n\rightarrow \infty }\alpha _{n}=0\);
-
(ii)
\(\sum _{n=0}^{\infty }\alpha _{n}=\infty \) and \(\sum _{n=0}^{\infty }\left| \alpha _{n+1}-\alpha _n\right| <\infty \);
-
(iii)
\(0<\varepsilon \le s_n\le s_{n+1}<1\) for all \(n\ge 0\). Then, \(\left\{ x_{n}\right\} \) converges strongly to a fixed point \(q\in \Omega \), which also solves the variational inequality:
$$\begin{aligned} \left<f(q)-\mu F(q),y-q\right>\le 0,\text { for all } y\in \Omega . \end{aligned}$$
Proof
By Lemma 4.4, we have that \(T_{r_i}\) is firmly nonexpansive. Moreover, we prove that \(T_{r_i}\) is attracting nonexpansive. Indeed, For all \(x\notin F(T_{r_i})\) and \(y\in F(T_{r_i})\), we observe
which implies that
Therefore, \(T_{r_i}\) is attracting nonexpansive. It follows from Lemma 4.5 that
Therefore, we obtain the desired result by Theorem 3.1 easily. This finishes the proof. \(\square \)
5 Numerical Examples

Two dimension

Three dimension
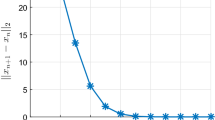
Example 5.1
We define the inner product \(<\cdot ,\cdot >:\mathbb {R}^3\times \mathbb {R}^3\rightarrow \mathbb {R}\) by
and the usual norm \(\left\| \cdot \right\| :\mathbb {R}^3\rightarrow \mathbb {R}\) is defined by
Let \(F,T,f:\mathbb {R}^3\rightarrow \mathbb {R}^3\) be defined by
Let
and let \(\left\{ x_n\right\} \) be a sequence generated by (3.1). It is easy to see that F is 1-Lipschitzian and 1-strongly monotone. Then, we can set \(\mu =1\), it follows that \(\tau =1\). It is easy to see that all conditions of Theorem 3.1 hold.
We can rewrite (3.1) as follows:
Choosing \(\mathbf x _1=(1,2,4)\) in (5.1), we have the following numerical result in Figs. 1 and 2.
Example 5.2
Suppose that \(C=H = L^2([0,1])\) with norm \(\Vert x\Vert :=\left( \int _0^1 |x(t)|^2\mathrm{d}t\right) ^{\frac{1}{2}}\) and inner product \(\langle x,y\rangle := \int _0^1 x(t)y(t)\mathrm{d}t,~~x,y \in H\). Let us define

Case I

Case II
Then, it can be shown that T is a nonexpansive mapping and that F is \(\frac{1}{2}\)-strongly monotone and 1-Lipschitz continuous on C. Therefore, \(F(T)\ne \emptyset \) and from Theorem 3.1, we have \(k=1\) and \(\eta =\frac{1}{2}\). We choose \(\mu =\frac{1}{2}\). Then, it is clear that \(0<\mu <\frac{2\eta }{k^2}\) and \( \tau =1-\sqrt{1-\mu (2\eta -\mu k^2)}=1-\sqrt{\frac{3}{4}}\). Suppose that \(\alpha _n:=\frac{1}{n+1},~~s_n:=\frac{n}{2(n+1)}\) and \(f(x):=\frac{1}{4}x,~~x \in C\). Then, \(\alpha :=\frac{1}{4}\), and it is clear that \(\alpha =\frac{1}{4}<1-\sqrt{\frac{3}{4}}=\tau \). Therefore, all the conditions in Theorem 3.1 are satisfied and our Algorithm (3.1) becomes
We choose different starting point \(x_0(t)\) with stopping criterion \(||x_{n+1}-x_n||<\varepsilon \) with \(\varepsilon =10^{-2}\). The results are presented in Table 1 and Figs. 3 and 4.
Case I \(x_1(t)=\frac{1}{50}e^{20t}\).
Case II \(x_1(t)=\frac{1}{40}t^2+\frac{e^{-30t}}{40}\).
References
Moudafi, A.: Viscosity approximation methods for fixed points problems. J. Math. Anal. Appl. 241, 46–55 (2000)
Xu, H.K.: Viscosity approximation methods for nonexpansive mappings. J. Math. Anal. Appl. 298, 279–291 (2004)
Song, Y., Chen, R., Zhou, H.: Viscosity approximation methods for nonexpansive mapping sequences in Banach spaces. Nonlinear Anal. 66, 1016–1024 (2007)
Blum, E., Oettli, W.: From optimization and variational inequalities to equilibrium problems. Math. Stud. 63, 123–145 (1994)
Flam, S.D., Antipin, A.S.: Equilibrium programming using proximal-like algorithms. Math. Program. 78, 29–41 (1997)
Peng, J.W., Yao, J.C.: A viscosity approximation scheme for system of equilibrium problems, nonexpansive mappings and monotone mappings. Nonlinear Anal. 71, 6001–6010 (2009)
Yao, Y., Noor, M.A., Liou, Y.C., Kang, S.M.: Some new algorithms for solving mixed equilibrium problems. Comput. Math. Appl. 60, 1351–1359 (2010)
Qin, X., Cho, Y.J., Kang, S.M.: Viscosity approximation methods for generalized equlibrium problems and fixed point problems with applications. Nonlinear Anal. 72, 99–112 (2010)
Sunthrayuth, P., Kumam, P.: Viscosity approximation methods base on generalized contraction mappings for a countable family of strict pseudo-contractions, a general system of variational inequalities and a generalized mixed equilibrium problem in Banach spaces. Math. Comput. Modell. 58, 1814–1828 (2013)
Deuflhard, P.: Recent progress in extrapolation methods for ordinary differential equations. SIAM Rev. 27(4), 505–535 (1985)
Bader, G., Deuflhard, P.: A semi-implicit mid-point rule for stiff systems of ordinary differential equations. Numer. Math. 41, 373–398 (1983)
Somalia, S.: Implicit midpoint rule to the nonlinear degenerate boundary value problems. Int. J. Comput. Math. 79(3), 327–332 (2002)
Alghamdi, M.A., Ali Alghamdi, M., Shahzad, N., Xu, H.K.: The implicit midpoint rule for nonexpansive mappings. Fixed Point Theory Appl. 2014, 96 (2014)
Xu, H.K., Alghamdi, M.A., Shahzad, N.: The viscosity technique for the implicit midpoint rule of nonexpansive mappings in Hilbert spaces. Fixed Point Theory Appl. 2015, 41 (2015)
Yao, Y., Shahzad, N., Liou, Y.C.: Modified semi-implicit midpoint rule for nonexpansive mappings. Fixed Point Theory Appl. 2015, 166 (2015)
Ke, Y., Ma, C.: The generalized viscosity implicit rules of nonexpansive mappings in Hilbert spaces. Fixed Point Theory Appl. 2015, 190 (2015)
Goebel, K., Reich, S.: Uniform Convexity, Hyperbolic Geometry, and Nonexpansive Mappings. Marcel Dekker, New York (1984)
Reich, S.: Constructive Techniques for Accretive and Monotone Operators. Applied Nonlinear Analysis. Academic Press, New York (1979)
Goebel, K., Kirk, W.A.: Topics on Metric Fixed Point Theory. Cambridge University Press, Cambridge (1990)
Xu, H.K., Kim, T.H.: Convergence of hybrid steepest-descent methods for variational inequalities. J. Optim. Theory Appl. 119(1), 185–201 (2003)
Zhou, H.: Convergence theorems of fixed points for \(k\)-strict pseudo-contractions in Hilbert spaces. Nonlinear Anal. 69(2), 456–462 (2008)
Combettes, P.L., Hirstoaga, S.A.: Equilibrium programming in Hilbert space. J. Nonlinear convex Anal. 6, 117–136 (2005)
Chancelier, J.P.: Iterative schemes for computing fixed points of nonexpansive mappings in Banach spaces. J. Math. Anal. Appl. 353, 141–153 (2009)
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by the NSF of China (No. 11401063), the University Young Core Teacher Foundation of Chongqing (020603011714), and Science and Technology Project of Chongqing Education Committee (Grant No. KJ1500313, KJ KJ1703041, KJ1703043).
Rights and permissions
About this article

Cite this article
Cai, G., Shehu, Y. & Iyiola, O.S. Modified viscosity implicit rules for nonexpansive mappings in Hilbert spaces. J. Fixed Point Theory Appl. 19, 2831–2846 (2017). https://doi.org/10.1007/s11784-017-0458-5
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11784-017-0458-5