
Abstract
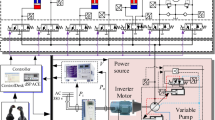
A retrofitted electro-hydraulic proportional system for hydraulic excavator was introduced firstly. According to the principle and characteristic of load independent flow distribution(LUDV) system, taking boom hydraulic system as an example and ignoring the leakage of hydraulic cylinder and the mass of oil in it, a force equilibrium equation and a continuous equation of hydraulic cylinder were set up. Based on the flow equation of electro-hydraulic proportional valve, the pressure passing through the valve and the difference of pressure were tested and analyzed. The results show that the difference of pressure does not change with load, and it approximates to 2.0 MPa. And then, assume the flow across the valve is directly proportional to spool displacement and is not influenced by load, a simplified model of electro-hydraulic system was put forward. At the same time, by analyzing the structure and load-bearing of boom instrument, and combining moment equivalent equation of manipulator with rotating law, the estimation methods and equations for such parameters as equivalent mass and bearing force of hydraulic cylinder were set up. Finally, the step response of flow of boom cylinder was tested when the electro-hydraulic proportional valve was controlled by the step current. Based on the experiment curve, the flow gain coefficient of valve is identified as 2.825 × 10−4 m3/(s·A) and the model is verified.
Article PDF
Similar content being viewed by others


Avoid common mistakes on your manuscript.
References
WANG Fei-yue, LEVEL P J A. On-line trajectory planning for autonomous robotic excavation based on force/torque sensor measurements [C]// The 1994 IEEE International Conference on Multisensory Fusion and Intelligent Systems. Piscatauny: IEEE, 1994: 371–378.
HAGA M, HIROSHI W, FUJISHIMA K. Digging control system for hydraulic excavator [J]. Mechatronics, 2001, 11(6): 665–676.
ZHANG Da-qing, HE Qing-hua, HAO Peng. Trajectory tracking control of hydraulic excavator bucket [J]. Journal of Jilin University: Engineering and Technology Edition, 2005, 35(5): 490–494. (in Chinese)
LEE S U, CHANG P H. Control of a heavy-duty robotic excavator using time delay control with switching action with integral sliding surface [C]// The 2001 IEEE international Conference on Robotics & Automation. Seoul: IEEE, 2001: 3955–3960.
PYUNG H C, LEE S J. A straight-line motion tracking control of hydraulic excavator system [J]. Mechatronics, 2002, 12(1): 119–138.
LEE S U, CHANG H C. Control of a heavy-duty robotic excavator using time delay control with integral sliding surface [J]. Control Engineering Practice, 2002, 12(1): 697–711.
NGUYEN H Q. Robust low level control of robotic excavation [D]. Sydney: University of Sydney, 2000: 8–11.
SHAHRAM T, SEPTIMIU S E, KEYVAN H Z. Impedance control of a teleoperated excavator [J]. IEEE Transactions on Control Systems Technology, 2002, 10(3): 355–367.
CHEN Qian-gen, JI Yun-feng, WU Wang-rong. Load independent flow distribution control system [J]. Hydraulic and Pneumatic, 2003(10): 9–11. (in Chinese)
LI Hong-ren. Hydraulic controlling system [M]. Beijing: Defense Industry Press, 1981: 59–60. (in Chinese)
BORA E. Improved nonlinear modeling and control of electro-hydraulic systems [D]. Boston: Northeastern University, 2000: 78–80.
ZHANG Wei-han. The research of non-symmetry oil cylinder system controlled by symmetry valve and characteristic [D]. Changchun: Changchun University of Science and Technology, 2002: 55–56. (in Chinese)
HE Qing-hua, LI Li-zheng, ZHOU Hong-bing. Modeling and parameter estimation for double triangle boom and its hydraulic system [J]. Journal of Central South University: Natural Science, 2001, 32(5): 519–522. (in Chinese)
ZHANG Cheng-qian, ZHANG Guo-qiang. System identification and parameters estimation [M]. Beijing: China Machine Press, 1986: 101–103. (in Chinese)
SHAHRAM T, PETER D L, SALCUDEAN S E. Identification of inertial and friction parameters for excavator arms [J]. IEEE Transactions on Robotics and Automation, 1999, 15(5): 966–971.
BU Fan-ping, YAO Bin. Nonlinear adaptive robust control of hydraulic actuators regulated by proportional directional control valves with dead band and nonlinear flow gains [C]// Proceedings of the American Control Conference. Danvers: American Autom Control Council, 2000: 4129–4133.
Author information
Authors and Affiliations
Corresponding author
Additional information
Foundation item: Project(2003AA430200) supported by the National High-Tech Research and Development Program of China
Rights and permissions
About this article
Cite this article
He, Qh., Hao, P. & Zhang, Dq. Modeling and parameter estimation for hydraulic system of excavator’s arm. J. Cent. South Univ. Technol. 15, 382–386 (2008). https://doi.org/10.1007/s11771-008-0072-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11771-008-0072-1