
Abstract
In order to interpret ultrasound images, it is important to understand their formation and the properties that affect them, especially speckle noise. This image texture, or speckle, is a correlated and multiplicative noise that inherently occurs in all types of coherent imaging systems. Indeed, its statistics depend on the density and on the type of scatterers in the tissues. This paper presents a new method for echocardiographic images segmentation in a variational level set framework. A partial differential equation-based flow is designed locally in order to achieve a maximum likelihood segmentation of the region of interest. A Rayleigh probability distribution is considered to model the local B-mode ultrasound images intensities. In order to confront more the speckle noise and local changes of intensity, the proposed local region term is combined with a local phase-based geodesic active contours term. Comparison results on natural and simulated images show that the proposed model is robust to attenuations and captures well the low-contrast boundaries.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Ultrasound imaging represents one of the most popular exploration techniques commonly used in many diagnostic and therapeutic applications. It has many advantages: it is noninvasive, provides images in real time and requires lightweight material. However, ultrasound images segmentation is particularly difficult mainly due to the low signal-to-noise ratio, low-contrast and high amounts of speckle. This image texture, or speckle, is a correlated and multiplicative noise that inherently occurs in all types of coherent imaging systems. Hence, it makes modeling difficult as its statistics depend on the density and the type of scatterers in the tissues. All these characteristics make segmentation difficult and therefore complicate the diagnosis task [38].
This paper concerns the development of a novel region-based active contour model in a variational level set framework. First, we use a kernel function to define a local energy around a given point. This energy characterizes the fitting of the local Rayleigh distribution to the local image data around a neighborhood of a point. This local energy is then embedded over the entire image domain. The local intensity pdf parameter, which is spatially a varying function, is a variable of the energy functional and is estimated locally using the Maximum Likelihood principle. The minimization of the energy functional is achieved by solving the gradient descent flow equation. The final evolution equation is then simplified to an easy equation to handle. Our method is hybrid, it combines a local region-based term an a contour-based term derived from the GAC (Geodesic Active Contours). The latter uses local phase information derived from the monogenic signal [21] to detect edges.
Some preliminary results of this study have been presented in [5]. Here the images database is expanded to 50 new manual delineations corresponding to 5 new B-mode images. Moreover, a new database including 60 synthetic (B-mod and RF) images is carried out. The quadrature filter used for the edge detection term is the \(\alpha \) scale spaces derivative (ASSD) filter [3].
B-mode ultrasound images segmentation methods (overall, focused on the echocardiographic images) are reviewed in the next section. The proposed segmentation method is presented in Sect. 3. Section 4 shows preliminary experimental results on real and synthetic data. Section 5 provides a discussion followed by some concluding remarks.
2 Background
Several ways to classify ultrasound segmentation methods, can be found in the literature. One of the most popular way is the classification according to their level of complexity (low, intermediate and high level). There are other frequently encountered types of classification based on whether the approaches are global, contours, region or continuous. In this paper, we opted for characterizing methods in terms of a priori knowledge or constraints used to resolve the segmentation problem. This new view of methods classification is inspired by that presented in [37]. Based on this formalism, two types of constraints are distinguished. Firstly, the constraints related to the information that can be extracted from the image or imaging system; secondly, the constraints related to the nature of the object concerned by segmentation, as its anatomy or its physiological behavior.
2.1 Constraints related to the image and imaging
2.1.1 Gray level distribution
Backscattering energy of echo signals create interference patterns in the acquired signal called speckles. These inherent speckles degrade the resolution of the signal and corrupt the specificity of gray level intensities. Several empirical models were used to describe the gray level distribution. As known in the literature, fully developed speckle noise in envelope-detected ultrasound signals can be modeled by Rayleigh distribution. Indeed, the Rayleigh model is the most commonly used to describe the speckle phenomenon [1, 8, 9, 26, 38, 44, 46].
This model is embedded in the more general Rician noise model that also applies to MRI noise [43, 50]. In case of low SNR, as in ultrasound, the Rician distribution tends to a Rayleigh distribution, while at high SNR, as in high quality MRI, the Rician distribution tends to a Gaussian distribution [48, 51]. In order to account for the non-Rayleigh scattering, a number of distributions have been proposed, including the K-distribution [19], the Nakagami distribution [45], the Weibull distribution [23], and Generalized Gamma (GG) distribution [42].
The Rayleigh model has been used for edge detection by anisotropic diffusion [47], and in the methods of statistical segmentation [26, 33]. Good results of segmentation on the B-mode images have also been obtained by Slabaugh et al. [46] and Sarti et al. [44] incorporating the Rayleigh distribution in the level sets method. Other similar results in [5] have been obtained using the same principle. One can find other distributions models also used in segmentation algorithms, for example, we can mention the Gaussian [9], exponential [40], Gamma [49], Beta [32] and Rician Inverse Gaussian distributions [20].
2.1.2 Differential operators
The derivative of the intensity has proven to be a widely used method in many image processing areas for detecting the change in intensity as contours. Indeed, the maximum of the first derivative (or the zero crossing of the second derivative) can locate the change of intensity and discontinuities in the form of a step edge. These intensity changes and discontinuities are generally associated with the contours of objects in the image [14, 31, 32]. In the case of ultrasound images, this method is only efficient in the presence of strong acoustic discontinuities between different tissues. In addition, because of the anisotropic acquisition of ultrasound images, some object boundaries are often not detected or not at all.
Although very good progress has been made in the area of edge detection, gradient empirical estimation techniques proposed in the 80s are often still used in competition with more modern techniques.
2.1.3 Phase information
Some authors have shown that to detect the acoustic surfaces, the local phase information of the image is more robust than the intensity gradient [6, 28, 36]. By measuring the local phase or the phase congruency at several scales, this allows as to characterize the intensities differences in term of shape and not in term of strength of intensity. Indeed, the signal amplitude (or gradient) informs us about the strength of discontinuities, while the local phase provides information of the shape, making it independent to the change of intensity.
Morrone and Burr [34] have shown that the visual perception structures (structures that the human eye identifies as interesting) is associated with positions where the phases are in congruence, i.e., the points where the Fourier components are in phase. Thus, there is a strong link between the phase congruence and the presence of relevant characteristics. These points also inform us about the type of the detected structure, including lines and edges. For example, 0 or \(\pi \) as values of the local phase, correspond to the stair type discontinuity.
2.1.4 Texture measures
Because of the granular appearance of ultrasound image, texture is considered as a useful feature for classification or regions based segmentation methods [9, 18, 39]. These methods have had limited success in the scientific community. Indeed, the image texture is dependent on the microstructure of the tissue and the imaging system used. Different systems lead to different patterns of texture, and therefore these methods do not reflect the true characterization of the physical properties of the tissue. Moreover, the characterization of image texture is highly dependent on the spatial scale of analysis and requires the use of a multi-resolution approach [37].
2.2 Constraints relating to the structure of interest
2.2.1 Anatomy: shape
Often, region information (homogeneity constraint) and contour (discontinuity) are not enough to achieve a reliable and accurate segmentation. In the case of dropout ultrasound signal, the region and contour information can not identify the region of interest. Shape constraint is often a successful solution to improve the segmentation results. The first applications of such formalism to active contours, have proven ineffective for treating complex shapes. Non-parametric approaches, better suited to general medical applications, are developed. The shape constraint may be embedded into the segmentation model by different ways. For example, using in particular an explicit form of representation as the point distribution model [15]. The first applications of such formalism to active contours, have proven ineffective for treating complex shapes. Non-parametric approaches, better suited to general medical applications, are developed. The formalism of the level sets can implement these methods effectively and topological changes are permitted [17, 52]. The use of shape constraints in images segmentation methods have become very popular in recent years [16, 24, 38].
2.2.2 Physiology: motion
One of the reasons of the frequently use of ultrasound imaging is that it provides dynamic images. Therefore, the literature on the spatiotemporal segmentation is very broad. The typical example that we can mention is the segmentation of cardiac images, the structure has a quasi-periodic motion. Several applications and motion-based models can be readily found in the literature. One can in particular refer to the survey of Noble et al. [38].
The motion constraint can be injected into the segmentation model following several assumptions: for example, assuming a local or global temporal coherence [2, 14], assuming a constant velocity [25], or including time explicitly in the optimization process as in [7]. Zhu et al. [52] have introduced a new constraint to the movement that is the incompressibility of myocardium. The authors assume that during the cardiac cycle the myocardium is almost incompressible and its volume undergoes changes that are less than 5%. Recently, Porras et al. [41] have proposed a technique for myocardial motion estimation based on image registration using both B-mode echocardiographic images and tissue Doppler sequences.
3 Segmentation model
Let I denote a given image defined on the domain \(\varOmega \), and let \(\mathscr {C}\) be a closed contour represented as the zero level set of a signed distance function \(\phi \), i.e., \(\mathscr {C}=\{ {\mathbf x}|\phi ({\mathbf x})=0, {\mathbf x}\in \varOmega \}\). We specify the interior of \(\mathscr {C}\) by a smooth approximation of the Heaviside function \(H(\phi )\). Similarly, the exterior of \(\mathscr {C}\) is defined as \((1-H(\phi ))\).
We introduce the following classical energy functional to be minimized [12, 44]:
This energy model is composed of two terms: a gradient edge-based term \(\mathscr {L}_G(\phi )\) and a global region-based term \(\mathscr {R}_G(\phi )\). The first is the Geodesic Active Contour term (GAC) [13], were \(\lambda \) is a positive fixed parameter and g is an inverse edge indicator function, generally taken as \(g(x,y) = 1/(1+|\nabla G_s * I|)\). Here, \(G_s\) is the Gaussian kernel with SD s. The second is a global region-based term. Specifically, it is the log likelihood function to maximize, given by the product of the inner and the outer probabilities [12]. Here, \(p(I,\sigma )\) represents the probability density function characterizing the observed gray level of image I. \(\sigma _i\) and \(\sigma _o\) represent the parameters of the pdf, respectively, inside and outside the curve.
In the following, we define an alternative energy function, similar to the form of (1), but using local image properties. We use a local phase-based edge indicator function \(g = 1-\hbox {FA}_{\mathrm{MS}}^{\gamma }\) instead of the classical inverse gradient-based one. Here, \(\gamma \) is a scale parameter and \(\hbox {FA}_{\mathrm{MS}}\in [0,1]\) represents the monogenic feature asymmetry measure defined in [6] and estimated using the \(\upalpha \) scale spaces derivative (ASSD) filter [4]. This allows us to define the local phase-based GAC term noted \(\mathscr {L}_{P}(\phi )\). As it was mentioned in the introduction, recent works showed that ultrasound images respond well to phase-based edge detection. Moreover, a multi-scales approach offers a better control on the edge detection quality.
Now, we focus on our new local region term. Classical region-based methods, like the ML model, often make strong assumptions on the intensity distributions of the searched object and background. Localizing the region term seems to be a good alternative to avoid the attenuation artifact, which is one of the main characteristics of ultrasound images. We aim in the remainder of this section to change this term \(\mathscr {R}_G\) to a new local region-based term \(\mathscr {R}_L\) [11, 29, 30]. This term is a local version of the one presented by Sarti et al. [44].
Precisely, the proposed model is derived from [29]. The proposed model in [30, 51] is considered as a special case of the one presented in [29]. Values of level set function are estimated only in a narrow band around the zero level set, which is not the case in [30, 51]. The functional of our model is an adaptation of that presented in [29]. The local intensity pdf parameter is estimated locally using the Maximum Likelihood principle. The minimization of the energy functional is achieved by solving the gradient descent flow equation. The final evolution equation is then simplified to an easy equation to handle.
In the work of Brox and Cremers [11], the authors assume that pixel intensities are realizations of the random (Gaussian) variable and are not, as usual, identically distributed but the distribution varies with the position in the image. As we have already mentioned previously, the most commonly used statistical intensity model for ultrasound images is the Rayleigh distribution. Thus, here we also assume that observed intensities are independant Rayleigh random variables. We also assume, as in [11], that the indentically distributed assumption is valid only locally.
Thus, we use the Rayleigh probability distribution \(p(I)=I/\sigma ^2 \hbox {exp} (-I^2/2\sigma ^2)\), to model the behavior of the observed gray levels. To achieve this, we introduce the following characteristic function \(\mathscr {B}\) used to define a local region in terms of a radius parameter r [29],
Thus, the local region version around a given point \({\mathbf x}\), of the global region term \(\mathscr {R}_G\) in (1), is given by:
This formulation allows as to estimate the pdf parameter \(\sigma ^2\) locally, inside and outside the curve. The local ML estimates are given by:
where \(M_i\) and \(M_o\) denote, respectively, the local area inside and outside \(\varOmega \) and are given as:
By introducing these estimates back in the local log likelihood (2), we obtain the new formulation:
By bringing the local phase and local region terms, we now define our new energy built from (1) as follows:
\(F(.;{\mathbf x})\) represents a local image contribution at each point along the curve evolution. This formulation is under the assumption that the local behavior of an ultrasound image follows the Rayleigh distribution, and assuming that the size of this local region is sufficient for a maximum likelihood estimation of the parameter \(\sigma \).
It is straightforward to see that the mask \({\mathscr {B} ({\mathbf y};{\mathbf x})}\) is independent of \(\phi \). Thus, the associated flow equation of \(F(\phi ;{\mathbf x})\) is given by:
in agreement with [44]. Finally, the gradient descent flow minimizing (3), in the level set formulation, is given by:
4 Results and discussion
In order to evaluate the proposed method and quantify its accuracy, we have compared the results of our proposed approach with those of other closely related algorithms. Three quantitative measures have been used. An area overlap ratio, namely the Dice Similarity Coefficient (DSC) and two metric distances: the Mean Absolute Distance (MAD) which measures and average error and the Hausdorff Distance (HD) accounting for maximum errors between two contours.
The third distance is referred by HD (Hausdorff Distance). The closer the DSC and the MAD (also HD) values to 1 and 0, respectively, the better is the segmentation. In all of the experimental results, the radius of the localizing ball r was fixed to 11 pixels. Unless otherwise stated, the regularization term parameter \(\lambda \) is set to 0.6. The following ASSD filter parameters were fixed as such: bandwidth \(\in \{2.5, 1.5\}\) octaves, wavelength is 23 pixels for real images and is 7 and 9 pixels, respectively, for B-scan and RF simulated images.
4.1 Evaluation with manual segmentations
As a preliminary validation, we have compared the semiautomatic algorithm results to manual segmentations. We have collected a set of 15 bidimensional cardiac ultrasound images for different patients, obtained from a Philips IE33 echocardiographic imaging system. The data set was segmented by two specialists in an independent way, i.e., in different days. Each specialist segments each image 5 times, in order that 10 manual segmentations are available for each image. Thus, in all, we have 150 manual segmentations. This allows measuring the inter- and intraobserver variabilities, that are the difference delineations performed by the same specialist as well as the difference between segmentations performed by different specialists, respectively.
The comparison between the computer versus the manually traced contours resulted in a perfect agreement in the areas calculated with both techniques, with a very good correlation (\(r = 1\)). In Fig. 1, the linear regression and Bland-Altman results are graphically reported. An example of the automated versus the manually traced contours is shown in Fig. 2 (right) where the good correspondence can be appreciated. In the same figure, we can see an illustrative comparison results of the proposed segmentation algorithm and the results of the global ML algorithm [44] with manual delineation. These results give the reader some insight regarding the robustness to speckle noise and to attenuation. Note that, the manual segmentation seems to be more regular then the automatic one.

Inside area (in mm\(^2\)) based comparison of our local ML model against manual contours. left: linear regression analysis; The dashed line is the first bisector. Right: Bland-Altman analysis

Comparison of the proposed method (left) and the global ML model (right) with a manual delineation. Blue line: manual delineation, white line: semiautomatic segmentation. Parameter \(\lambda = 0.7\)
The experiment in Fig. 3 shows the performance of the monogenic feature asymmetry to detect step edge boundaries in very noisy and low-contrast data. The adverse effect of FA measure is the delocalization, by moving closer to finer scales, the FA measure recovers details and discontinuities, but looses the regularity and the continuity of the boundaries. Are shown in the same figure, illustrative results of our method on two typical ultrasound images (left ventricle).

Examples of the proposed model segmentation results in echocardiographic images. Top of the figure: the original images, in the middle: the edge detections performed by the monogenic feature asymmetry. Bottom: segmentation results. The inner dashed contours are the respective initializations. In this experiments, \(\lambda = 0.7\)
Tables 1 and 2 show a quantitative comparison between our approach -noted LP + LML for Local Phase with a Local ML model- and two semiautomatic segmentation methods: classical GAC and GAC with a global ML model (GAC + GML). Inter- and Intraobserver values are also shown in this table. The mean, median and SD of all the echocardiographic images segmentations are shown for the three measures: Dice similarity coefficient, mean absolute distance and Hausdorff distance (see, for example [6, 14, 52]).
Table 1 reports the results of the distance between the algorithm and all the manuals delineations, while Table 2 reports the results of the distance between the algorithm and the mean manuals delineations of each physician. As expected, comparison results with the average manual segmentation are better than those compared with all manual segmentations, the error and the SD decrease. It can be noted that, the intraobserver values are lower than those of the interobserver, and much less than those of all the automatic methods (GAC, GAC + GML and LP + LML). The low SDs of the intraobserver let us assume regular segmentations of the two specialists.
4.2 Evaluation on simulated ultrasound images
In order to demonstrate the usefulness of the proposed approach, we chose, among others, to test it on realistic US simulations. To this end, we have used the simulated ultrasound images with ground truth contours by Boukerroui [8]. Some typical images are shown in Figs. 4 and 5.
He used the simulation program Field-II [26], to synthesize phantom data with known ground truth. Please refer to Boukerroui [8] for more details. In total 60 realistic simulated ultrasound images with known ground truth were synthesized, accounting for different scattering statistics and several dB ranges for the envelope logarithmic compression to simulate different image contrasts. Table 3 summarizes the results of the comparison of our approach, and the model called Local Gaussian Distribution Fitting (LGDF) presented in [51].
Experiments on simulated data also confirm our observations about the performance of the proposed method. The results obtained by the LP + LML method are better than those of the LGDF model; although, the LGDF model also provides acceptable results, as we can see in Table 3. Segmentation by LP + LML provides the best results in terms of average performance and in terms of regularity, and also in terms of SD. The LGDF model does not fail also in terms of average performance. We have not shown the results obtained by the global methods because in most cases the curves of the level set fail.
The performance of the proposed approach compared to the LGDF model can be justified by firstly the edge-based term added to reinforce the detection. Secondly, our energy function is more localized than the LGDF model. Indeed, the two integrals of the local term are multiplied by the Dirac function in order to make the calculation only around the neighborhood of the contour and not on the whole image, see Eq. (3); while we can see, in [51] Equation (13), that the integral of the LGDF local term makes calculation on the whole image.
5 Discussion
The quantitative evaluation of Tables 1 and 2 shows as expected that the use of the term combined with the region one, provides a significant improvement compared to the conventional GAC term. This is due to the fact that the exclusive use of the edge detection techniques do not work on ultrasound images having contrast problems. The region term significantly improves the detection of edges and avoids local minima of energy. This kind of problem can be treated using other minimization alternatives other than a simple gradient descent, see, e.g., [49].

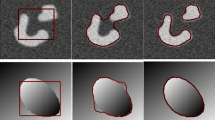
Illustrative segmentation results of the local Rayleigh model on simulated B-mode (top) and RF (bottom) images. From right to left: original image, FA edge detection and final result. Dashed line on the top right image shows the initialization

Illustrative segmentation results of the local Rayleigh model on simulated US images with different: tissues characteristics, attenuation level and log compression parameters. From top to bottom: original images, LGDF model results and proposed approach results
As we can see, the use of LP + LML improves even more the already good results obtained by GAC+GML. Indeed, the change of intensity is one of the main problems encountered in the application of region-based methods on ultrasound images. On highly noisy images with local intensity variations, the region term can segment the blood part of the left ventricle as a single region. Certainly, the underlying assumption of a single tissue with Rayleigh statistics is not practical in such situations. The additional proposed term, based on the phase information, is more robust to attenuation artifacts because it is theoretically invariant to the change of intensity.
The statistics in Tables 1 and 2 suggest that segmentations by the LP + LML method are not as good as those obtained manually, but still close. This can be explained by what is seen in Fig. 2, where manual results are more regular, while automated results tend to have more details. Nevertheless, a large variance is noted. Our analysis on this behavior focuses mainly on the attenuation on some images that can be a factor influencing the variance. This reinforces our conclusion regarding the robustness of the proposed approach compared to other existing alternatives.
Looking at the simulated images results in Table 3, we can observe that although the measures are not very discriminative between the two models, but globally the local Gaussian model is less competitive in comparison with the local Rayleigh one. This observation is also demonstrated in Fig. 5.
The radius parameter r is very important for the segmentation process. It can be adjusted according to the image intensity inhomogeneities. It is advisable not to use a very small value of r to ovoid a high variance in parameter estimation, nor a very large value to avoid a high bias. This parameter must be relatively small and sufficiently large. Using local statistics with an adaptive scale selection can be found in [8]. We also note that the localization adverse effect of FA discussed in the previous section can be corrected by the local region term.
6 Conclusion
A new model and a computational algorithm to segment B-mode ultrasound images has been presented. The technique is based on level set methods and exploits the a priori knowledge about the statistical distribution of image gray levels. Ultrasound images characteristics, such as attenuation and low contrast, suggest the use of local image properties in order to improve robustness and accuracy. Conventional global region-based and intensity gradient-based methods have had limited success on typical clinical images. To avoid this drawback, local phase-based and local-statistics-based approaches offer a good alternative, since they make the approach robust to attenuation artifacts. It is within this framework that we propose an alternative in this paper. The quantitative and qualitative evaluations on natural and synthetic data show, as expected, that the use of phase-based edge detection with an additional local region term provides a significant improvement with respect to the classical ones of the same nature. The key advantage of this approach is that it is more robust to intensity inhomogeneities.
References
Ahn, C.Y., Jung, Y.M., Kwon, O.I., Seo, J.K.: Fast segmentation of ultrasound images using robust Rayleigh distribution decomposition. Pattern Recognit. 45(9), 3490–3500 (2012)
Alessandrini, M., Basarab, A., Liebgott, H., Bernard, O.: Myocardial motion estimation from medical images using the monogenic signal. IEEE Trans. Image Process. 22(3), 1084–1095 (2013). https://doi.org/10.1109/TIP.2012.2226903
Belaid, A., Boukerroui, D.: \(\alpha \) scale spaces filters for phase based edge detection in ultrasound images. In: IEEE International Symposium on Biomedical Imaging, pp. 1247–1250. Beijing, China (2014)
Belaid, A., Boukerroui, D.: A new generalised \(\alpha \) scale spaces quadrature filters. Pattern Recognit. 47(10), 3209–3224 (2014)
Belaid, A., Boukerroui, D., Maingourd, Y., Lerallut, J.F.: Implicit active contours for ultrasound images segmentation driven by phase information and local maximum likelihood, pp. 630–635. Chicago, IL, USA (2011)
Belaid, A., Boukerroui, D., Maingourd, Y., Lerallut, J.F.: Phase based level set segmentation of ultrasound images. IEEE Trans. Inf. Technol. Biomed. 15(1), 138–147 (2011)
Bosch, J., Mitchell, S., Lelieveldt, B.P., Nijland, F., Kamp, O., Sonka, M., Reiber, J.H.: Automatic segmentation of echocardiographic sequences by active appearance motion models. IEEE Trans. Med. Imaging 21(11), 1373–1383 (2002)
Boukerroui, D.: A local Rayleigh model with spatial scale selection for ultrasound image segmentation. In: British Machine Vision Conference, BMVC 2012, Surrey, UK, September 3–7, 2012, pp. 1–12 (2012)
Boukerroui, D., Baskurt, A., Noble, J.A., Basset, O.: Segmentation of ultrasound images: multiresolution 2D and 3D algorithm based on global and local statistics. Pattern Recognit. Lett. 24(4–5), 779–790 (2003)
Boukerroui, D., Noble, J.A., Robini, M.C., Brady, J.: Enhancement of contrast regions in sub-optimal ultrasound images with application to echocardiography. Ultrasound Med. Biol. 27(12), 1583–1594 (2001)
Brox, T., Cremers, D.: On local region models and a statistical interpretation of the piecewise smooth mumford-shah functional. Int. J. Comput. Vis. 84(2), 184–193 (2009)
Chesnaud, C., Refregier, P., Boulet, V.: Statistical region snake-based segmentation adapted to different physical noise models. IEEE Trans. Pattern Anal. Mach. Intell. 21(11), 1145–1157 (1999)
Caselles, V., Kimmel, R., Sapiro, G.: Geodesic active contours. Int. J. Comput. Vis. 22(1), 61–79 (1997)
Chalana, V., Linker, D.T., Haynor, D.R., Kim, Y.: A multiple active contour model for cardiac boundary detection on echocardiographic sequences. IEEE Trans. Med. Imaging 15(3), 290–298 (1996)
Cootes, T.F., Taylor, C.J., Cooper, D.H., Graham, J.: Active shape models—their training and application. Comput. Vis. Image Underst. 61(1), 38–59 (1995)
Cremers, D., Rousson, M., Deriche, R.: A review of statistical approaches to level set segmentation: integrating color, texture, motion and shape. Int. J. Comput. Vis. 72(2), 195–215 (2007)
Dietenbeck, T., Alessandrini, M., Barbosa, C., D’Hooge, J., Friboulet, D., Bernard, O.: Detection of the whole myocardium in 2D-echocardiography for multiple orientations using a geometrically constrained level-set. Med. Image Anal. 16(2), 386–401 (2012). https://doi.org/10.1016/j.media.2011.10.003
Drukker, K., Giger, M.L., Mendelson, E.B.: Computerized detection and classification of cancer on breast ultrasound. Acad. Radiol. 11(5), 526–535 (2004)
Dutt, V., Greenleaf, J.F.: Ultrasound echo envelope analysis using a homodyned K distribution signal model. Ultrason. Imaging 16(4), 265–287 (1994)
Eltoft, T.: The Rician inverse gaussian distribution: a new model for non-rayleigh signal amplitude statistics. IEEE Trans. Image Process. 14(11), 1722–1735 (2005)
Felsberg, M., Sommer, G.: The monogenic signal. IEEE Trans. Signal Process. 49(49), 3136–3144 (2001)
Felsberg, M., Sommer, G.: The monogenic scale-space: a unifying approach to phase-based image processing in scale-space. J. Math. Imaging Vis. 21(1), 5–26 (2004)
Fernandes, D., Sekine, M.: Suppression of Weibull radar clutter. IEICE Trans. Commun. E76–B, 1231–1235 (1993)
Heimann, T., Meinzer, H.P.: Statistical shape models for 3D medical image segmentation: a review. Med. Image Anal. 13(4), 543–563 (2009)
Jacob, G., Noble, J., Behrenbruch, C., Kelion, A., Banning, A.: A shape-space-based approach to tracking myocardial borders and quantifying regional left-ventricular function applied in echocardiography. IEEE Trans. Med. Imaging 21(3), 226–238 (2002)
Jardim, S., Figueiredo, M.: Segmentation of fetal ultrasound images. Ultrasound Med. Biol. 31(2), 243–250 (2005)
Jensen, J.A.,: Field: a program for simulating ultrasound systems In: 10th Nordic-Baltic Conference on Biomedical Imaging, vol .34, pp. 351–353 (1996)
Kovesi, P.: Image features from phase congruency. Videre J. Comput. Vis. Res. 1(3), 1–26 (1999)
Lankton, S., Tannenbaum, A.: Localizing region-based active contours. IEEE Trans. Image Process. 17(11), 2029–2039 (2008)
Li, C., Kao, C., Gore, J., Ding, Z.: Implicit active contours driven by local binary fitting energy. In: Proceedings of IEEE Conference on Computer Vision Pattern Recognition (CVPR), pp. 1–7. IEEE Computer Society, Washington (2007)
Lin, N., Yu, W., Duncan, J.S.: Combinative multi-scale level set framework for echocardiographic image segmentation. Med. Image Anal. 7, 529–537 (2003)
Martin-Fernandez, M., Alberola-Lopez, C.: An approach for contour detection of human kidneys from ultrasound images using markov random fields and active contours. Med. Image Anal. 9(1), 21–23 (2005)
Mignotte, M., Collet, C., Pérez, P., Bouthemy, P.: Three-class Markovian segmentation of high-resolution sonar images. CVIU 76(3), 191–204 (1999)
Morrone, M.C., Burr, D.C.: Feature detection in human vision: a phase-dependent energy model. In: Proceedings of the Royal Society of London, Series B, vol. 235, pp. 221–245 (1988)
Mulet-Parada, M., Noble, J.A.: 2D+T acoustic boundary detection in echocardiography. In: MICCAI, pp. 806–813. Springer, London (1998)
Mulet-Parada, M., Noble, J.A.: 2D+ T acoustic boundary detection in echocardiography. Med. Image Anal. 4(1), 21–30 (2000)
Noble, J.A.: Ultrasound image segmentation and tissue characterization. Proc. IMechE H J. Eng. Med. 224(2), 307–316 (2010)
Noble, J.A., Boukerroui, D.: Ultrasound image segmentation: a survey. IEEE Trans. Med. Imaging 25(8), 987–1010 (2006)
Papadogiorgaki, M., Mezaris, V., Chatzizisis, Y.S., Giannoglou, G.D., Kompatsiaris, I.: Image analysis techniques for automated IVUS contour detection. Ultrasound Med. Biol. 34(9), 1482–1498 (2008)
Paragios, N., Jolly, M.P., Taron, M., Ramaraj, R.: Active shape models & segmentation of the left ventricle in echocardiography. In: International Conference on Scale Space Theories and PDEs methods in Computer Vision. Lecture Notes in Computer Science, vol. 3459, pp. 131–142 (2005)
Porras, A., Alessandrini, M., De Craene, M., Duchateau, N., Sitges, M., Bijnens, B., Delingette, H., Sermesant, M., D’Hooge, J., Frangi, A., Piella, G.: Improved myocardial motion estimation combining tissue Doppler and B-mode echocardiographic images. IEEE Trans. Med. Imaging 33(11), 2098–2106 (2014). https://doi.org/10.1109/TMI.2014.2331392
Raju, B.I., Srinivasan, M.A.: Statistics of envelope of high-frequency ultrasonic backscatter from human skin in vivo. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 49(6), 871–882 (2002)
Roy, S., Carass, A., Bazin, P.L., Resnick, S., Prince, J.L.: Consistent segmentation using a Rician classifier. Med. Image Anal. 16(6), 524–535 (2012)
Sarti, A., Corsi, C., Mazzini, E., Lamberti, C.: Maximum likelihood segmentation of ultrasound images with Rayleigh distribution. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 52(6), 947–960 (2005)
Shankar, P.M.: A general statistical model for ultrasonic backscattering from tissues. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 47(6), 727–736 (2000)
Slabaugh, G., Unal, G., Wels, M., Fang, T., Rao, B.: Statistical region-based segmentation of ultrasound images. Ultrasound Med. Biol. 35(5), 781–795 (2009)
Steen, E., Olstad, B.: Scale-space and boundary detection in ultrasonic imaging using nonlinear signal-adaptive anisotropic diffusion. In: Proceedings of SPIE Medical Imaging: Image processing (1994)
Song, Z., Awate, S.P., Licht, D.J., Gee J.C. :Clinical neonatal brain MRI segmentation using adaptive nonparametric data models and intensity-based Markov priors. In: Proceedings of Medical Image Computing and Computer Assisted Intervention, pp. 883-890 (2007)
Tao, Z., Tagare, H.: Tunneling descent level set segmentation of ultrasound images. In: IPMI, pp. 750–761 (2005)
Tohka, J., Dinov, I.D., Shattuck, D.W., Toga, A.W.: Brain MRI tissue classification based on local Markov random fields. Magn. Reson. Imaging 28(11), 557–573 (2010)
Wang, L., He, L., Mishra, A., Li, C.: Active contours driven by local gaussian distribution fitting energy. Signal Process. 89, 2435–2447 (2009)
Zhu, Y., Papademetris, X., Sinusas, A.J., Duncan, J.S.: A coupled deformable model for tracking myocardial borders from real-time echocardiography using an incompressibility constraint. Med. Image Anal. 14(3), 429–448 (2010)
Acknowledgements
The authors would like to thank Rabeh Djabri for English proofreading and Dr. Mathiron and Dr. Levy for their help in the clinical evaluation. Part of this work was funded by the Regional Council of Picardie and European Union/FEDER.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Belaid, A., Boukerroui, D. Local maximum likelihood segmentation of echocardiographic images with Rayleigh distribution. SIViP 12, 1087–1096 (2018). https://doi.org/10.1007/s11760-018-1251-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11760-018-1251-7